
A Wearable Channel Selection-Based Brain-Computer Interface for Motor Imagery Detection

Abstract
:1. Introduction
2. Methods
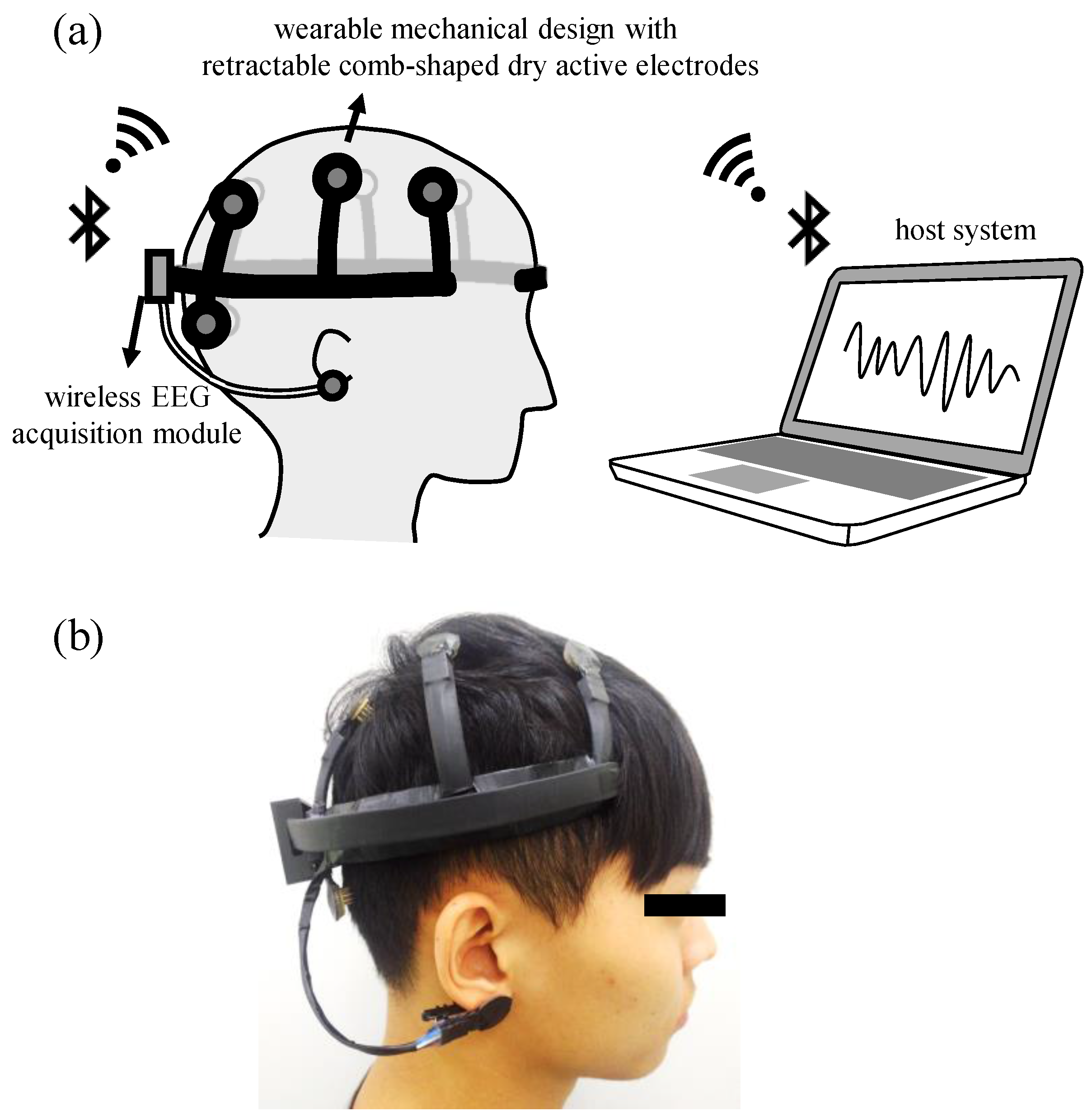
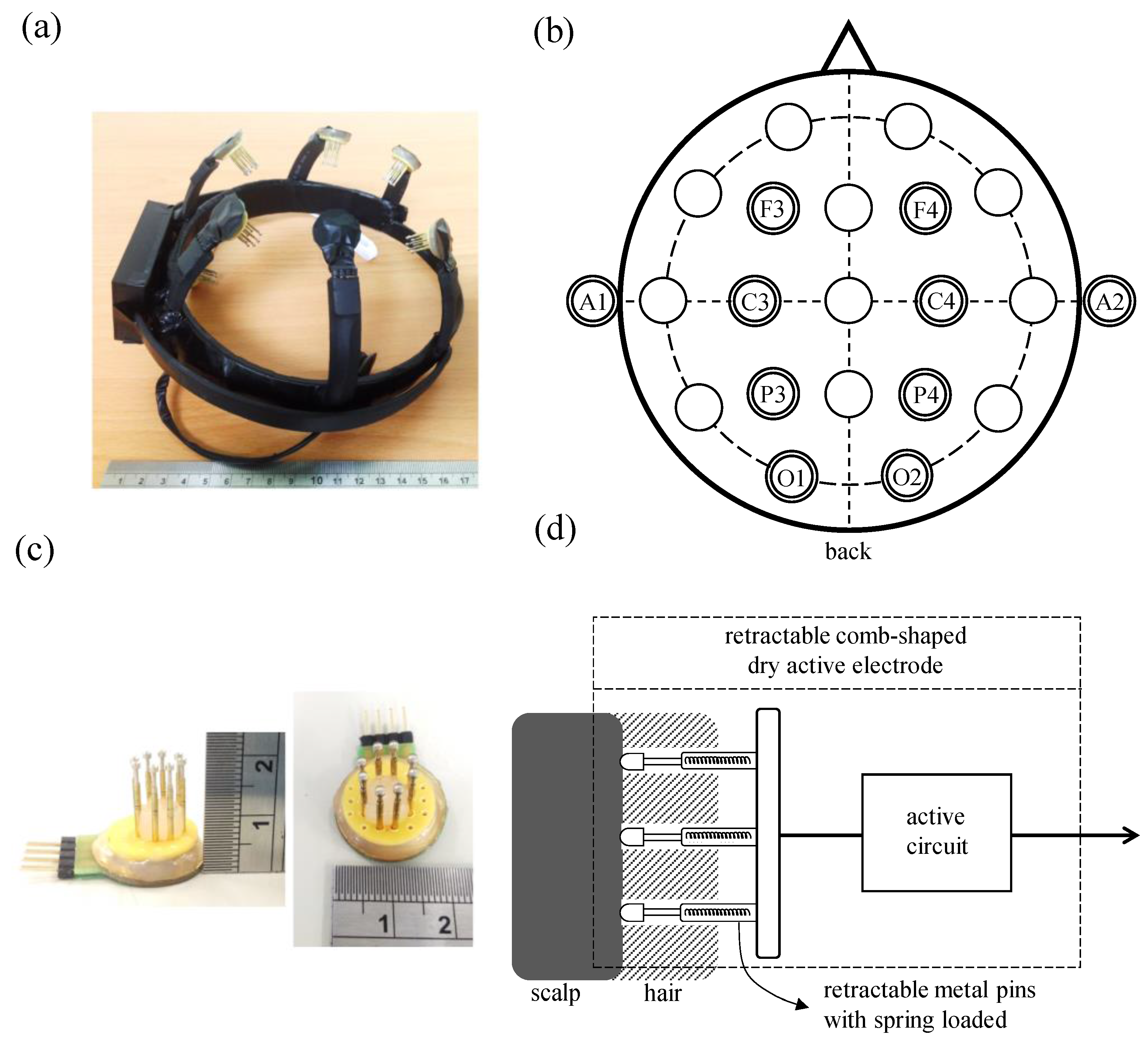
2.1. System Hardware Design and Implementation

2.1.1. Front-End Wearable EEG Device


2.1.2. Back-End Host System
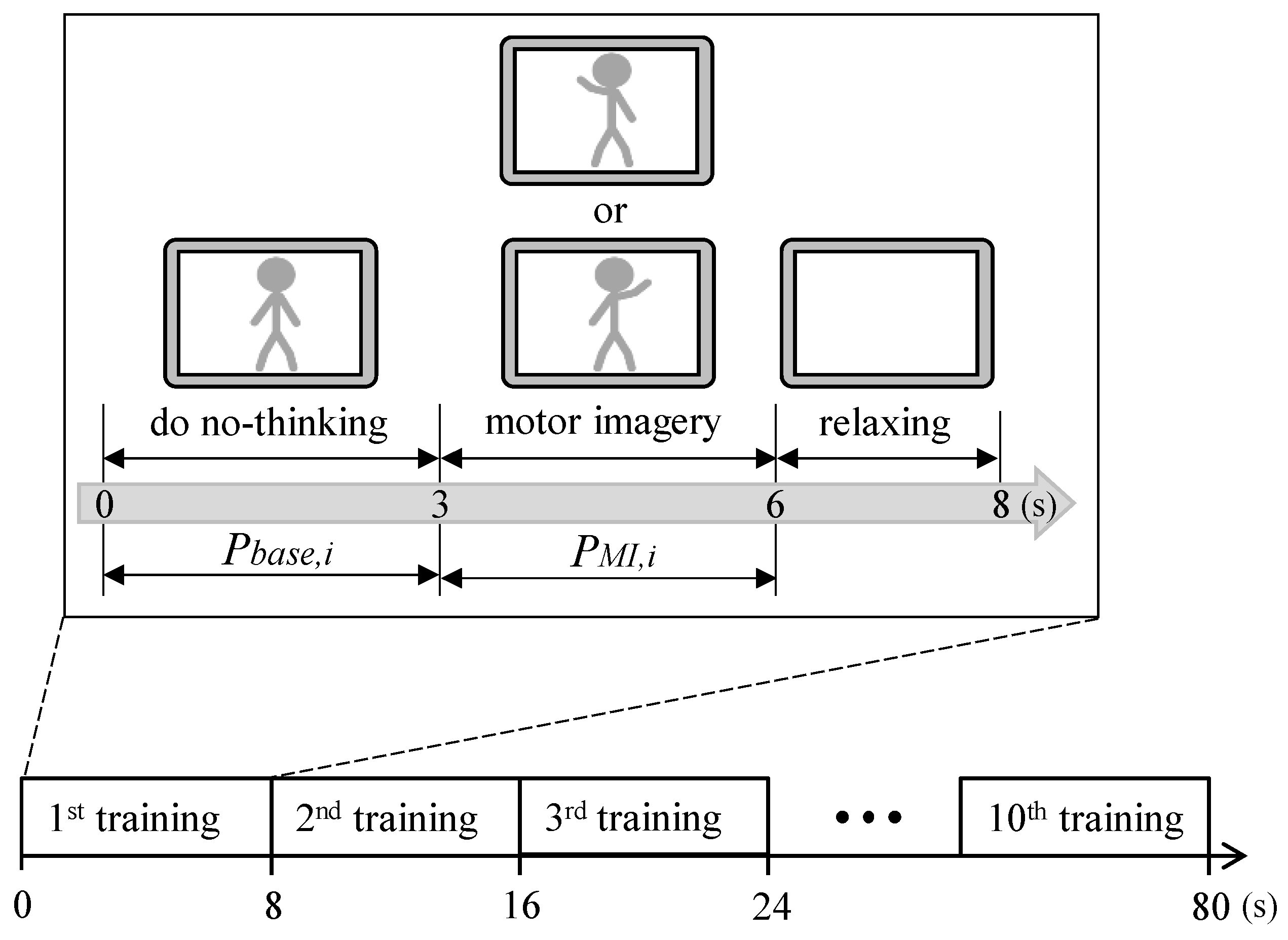
2.2. System Software Design
2.2.1. Channel Selection Algorithm

2.2.2. Motor Imagery Detection Algorithm
3. Results
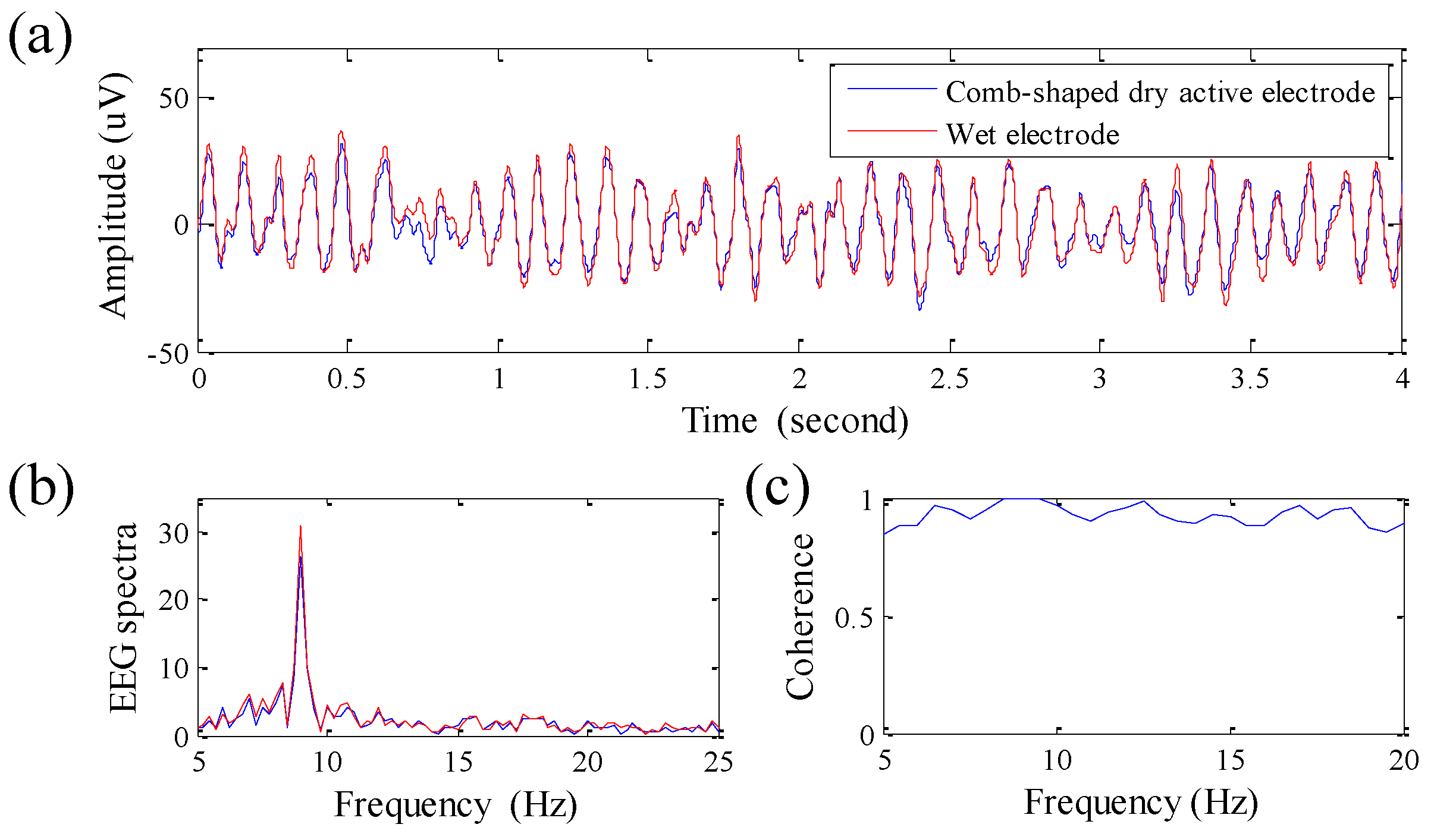
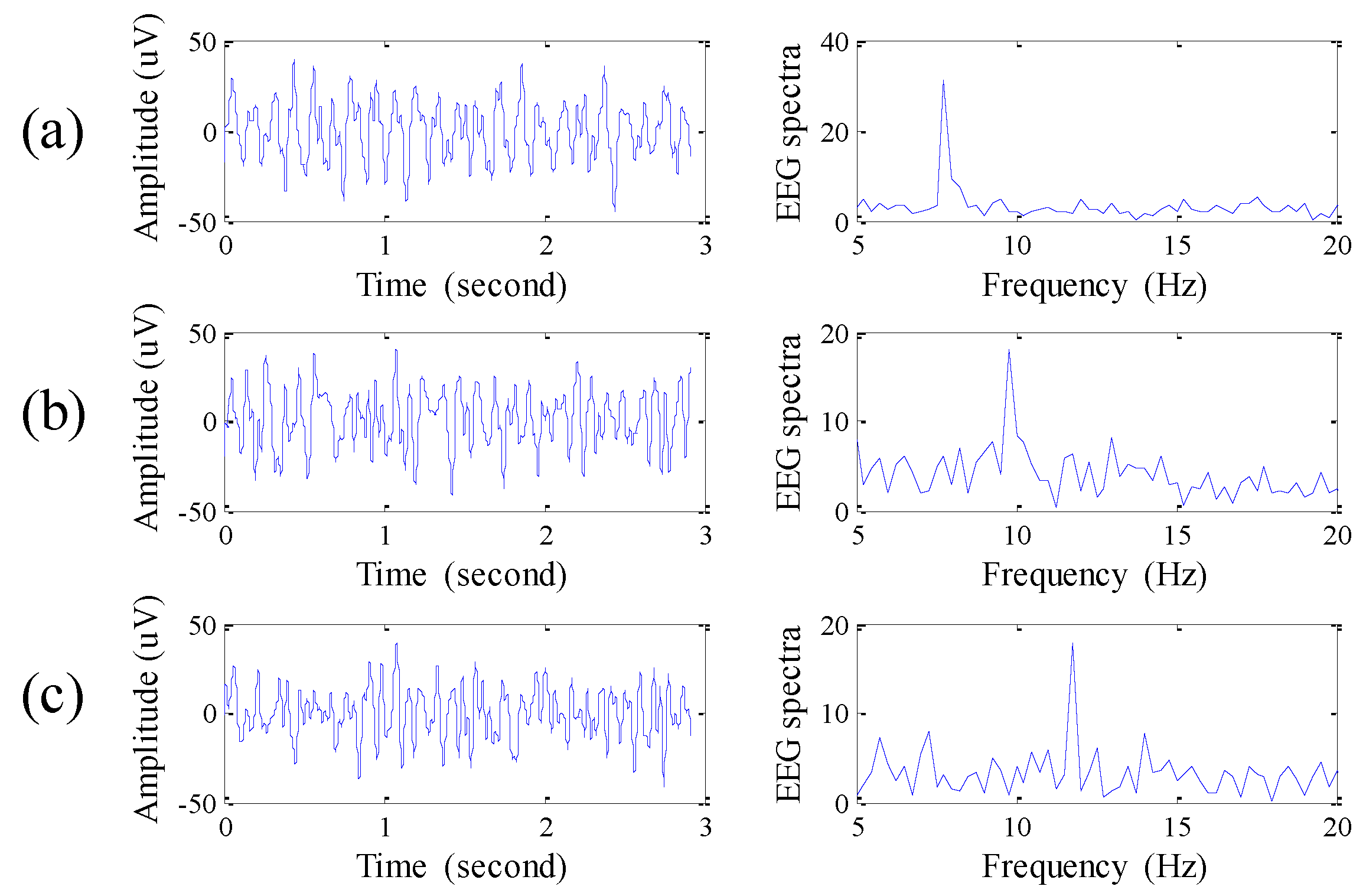
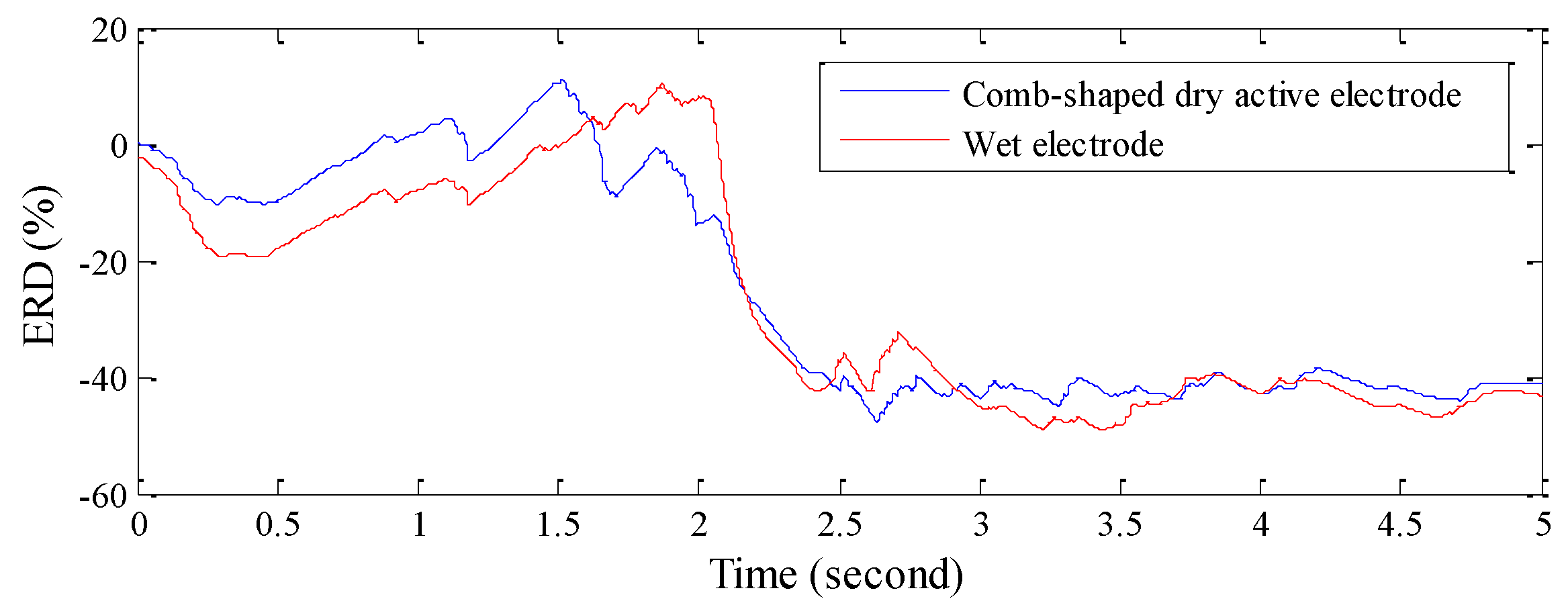
3.1. Performance of Retractable Comb-Shaped Dry Active Electrode



3.2. Performance of Channel Selection Function

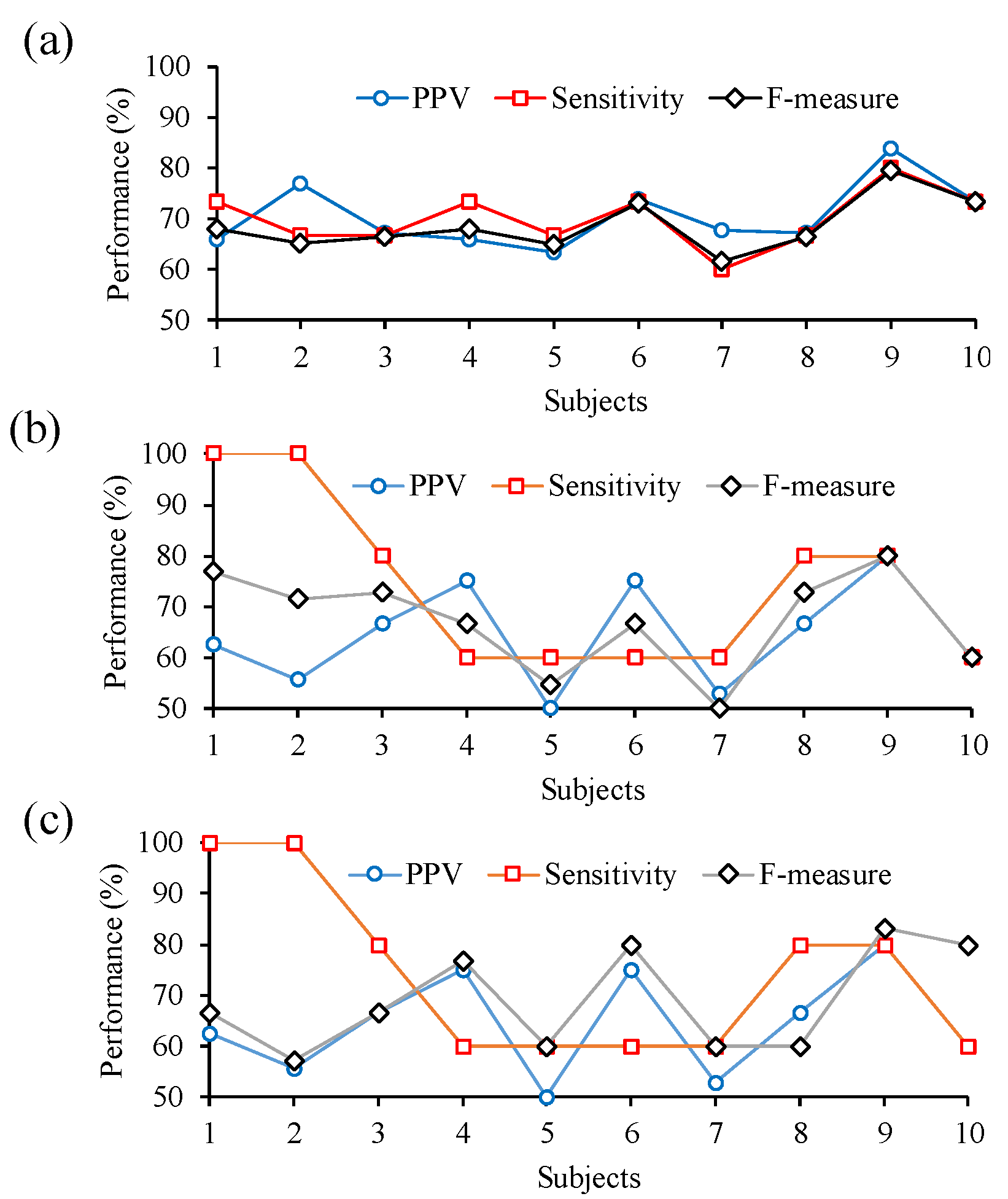
3.3. Performance of Motor Imagery Detection

4. Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lan et al. [12] | Arvaneh et al. [13] | Pfurtscheller et al. [27] | Kus et al. [28] | Obermaier et al. [29] | Proposed BCI | |
|---|---|---|---|---|---|---|
| Accuracy (%) | 80 | 81/82 | 65 | 74.8 | - | 71.1 |
| Bit rate(bits/min) | - | - | - | 4.5 | 3.1 | 3.2 |
| EEG features | Power spectral density | Common spatial pattern | Band power estimation | Spectral power estimation | EEG Pattern | EEG Power |
| Number of EEG channels | 32 | 22/118 | 32 | - | 29 | 8 |
| Function of channel selection | Yes | Yes | No | No | No | Yes |
| EEG sensor | EEG cup electrode | EEG cup electrode | EEG cup electrode | EEG cup electrode | EEG cup electrode | Noevl dry electrode |
| Main computing unit | Back-end computer | Back-end computer | Back-end computer | Back-end computer | Back-end computer | Front-end wearable EEG device |
| Wearable system | No | No | No | No | No | Yes |
| Wireless transmission | WiFi | No | No | No | No | Bluetooth |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Naseer, N.; Hong, K.S. Classification of functional near-infrared spectroscopy signals corresponding to the right-and left-wrist motor imagery for development of a brain–computer interface. Neurosci. Lett. 2013, 553, 84–89. [Google Scholar] [CrossRef] [PubMed]
- Naseer, N.; Hong, K.S. fNIRS-based Brain-computer interfaces: A review. Front. Hum. Neurosci. 2015, 9. [Google Scholar] [CrossRef] [PubMed]
- Zander, T.O.; Kothe, C. Towards passive brain-computer interfaces: Applying brain-computer interface technology to human-machine systems in general. J. Neural Eng. 2009, 8. [Google Scholar] [CrossRef] [PubMed]
- Pfurtscheller, G.; Lopes da Silva, F.H. Event-related EEG/MEG synchronization and desynchronization: Basic principles. Clin. Neurophysiol. 1999, 110, 1842–1857. [Google Scholar] [CrossRef]
- Ortner, R.; Allison, B.Z.; Korisek, G.; Gaggl, H.; Pfurtscheller, G. An SSVEP BCI to Control a Hand Orthosis for Persons With Tetraplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Yin, E.; Zhou, Z.; Jiang, J.; Chen, F.; Liu, Y.; Hu, D. A Speedy Hybrid BCI Spelling Approach Combining P300 and SSVEP. IEEE Trans. Biomed. Eng. 2014, 61, 473–483. [Google Scholar] [PubMed]
- Thomas, K.P.; Guan, C.; Lau, C.T.; Vinod, A.P.; Ang, K.K. A New Discriminative Common Spatial Pattern Method for Motor Imagery Brain-Computer Interface. IEEE Trans. Biomed. Eng. 2009, 56, 2730–2733. [Google Scholar] [CrossRef] [PubMed]
- McFarland, D.J.; McCane, L.M.; David, S.V.; Wolpaw, J.R. Spatial filter selection for EEG-based communication. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 386–394. [Google Scholar] [CrossRef]
- Ramoser, H.; Müller-Gerking, J.; Pfurtscheller, G. Optimal spatial filtering of single trial EEG during imagined hand movement. IEEE Trans. Rehabil. Eng. 2000, 8, 441–446. [Google Scholar] [CrossRef] [PubMed]
- Schröder, M.; Lal, T.N.; Hinterberger, T.; Bogdan, M.; Hill, N.J.; Birbaumer, N.; Rosenstiel, W.; Schölkopt, B. Robust EEG Channel Selection across Subjects for Brain-Computer Interfaces. EURASIP J. Appl. Signal Process. 2005, 19, 3103–3112. [Google Scholar] [CrossRef]
- Lal, T.N.; Schroder, M.; Hinterberger, T.; Weston, J.; Bogdan, M.; Birbaumer, N.; Scholkopf, B. Support vector channel selection in BCI. IEEE Trans. Biomed. Eng. 2004, 51, 1003–1010. [Google Scholar] [CrossRef] [PubMed]
- Lan, T.; Erdogmus, D.; Adami, A.; Mathan, S.; Pavel, M. Channel selection and feature projection for cognitive load estimation using ambulatory EEG. Comput. Intell. Neurosci. 2007, 2007, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Arvaneh, M.; Guan, C.; Ang, K.K.; Quek, C. Optimizing the Channel Selection and Classification Accuracy in EEG-Based BCI. IEEE Trans. Biomed. Eng. 2011, 58, 1865–1873. [Google Scholar] [CrossRef] [PubMed]
- Nishimura, S.; Tomita, Y.; Horiuchi, T. Clinical application of an active electrode using an operational amplifier. IEEE Trans. Biomed. Eng. 1992, 39, 1096–1099. [Google Scholar] [CrossRef] [PubMed]
- Ferreea, T.C.; Luu, P.; Russell, G.S.; Tucker, D.M. Scalp electrode impedance, infection risk, and EEG data quality. Clin. Neurophysiol. 2001, 112, 536–544. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Aranibar, A. Evaluation of event-related desynchronization (ERD) preceding and following voluntary self-paced movement. Electroencephalogr. Clin. Neurophysiol. 1979, 46, 138–146. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Stancák, A.; Neuper, C. Event-related synchronization (ERS) in the alpha band—An electrophysiological correlate of cortical idling: A review. Int. J. Psychophysiol. 1996, 24, 39–46. [Google Scholar] [CrossRef]
- Pfurtscheller, G. Functional brain imaging based on ERD/ERS. Vis. Res. 2001, 41, 1257–1260. [Google Scholar] [CrossRef]
- Beverina, F.; Palmas, G.; Silvoni, S.; Piccione, F.; Giove, S. User adaptive BCIs: SSVEP and P300 based interfaces. Psychnol. J. 2003, 10, 331–354. [Google Scholar]
- Yazdani, A.; Vesin, J.M.; Izzo, D. The impact of expertise on brain-computer interface based salient image retrieval. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 1646–1649.
- Guo, L.; Wu, Y.; Zhao, L. Classification of Mental Task From EEG Signals Using Immune Feature Weighted Support Vector Machines. IEEE Trans. Magn. 2011, 47, 866–869. [Google Scholar] [CrossRef]
- Wolpaw, J.R.; Ramoser, H.; McFarland, D.J.; Pfurtscheller, G. EEG-Based Communication: Improved Accuracy by Response Verification. IEEE Trans. Rehabil. Eng. 1998, 6, 326–333. [Google Scholar] [CrossRef] [PubMed]
- Yin, E.; Zhou, Z.; Jiang, J.; Chen, F.; Liu, Y.; Hu, D. A novel hybrid BCI speller based on the incorporation of SSVEP into the P300 paradigm. J. Neural Eng. 2013, 10, 1–9. [Google Scholar] [CrossRef] [PubMed]
- g.SAHARA Active Dry EEG Electrode System. Available online: http://www.gtec.at/Products/Electrodes-and-Sensors/g.SAHARA-Specs-Features (accessed on 2 February 2016).
- Baba, A.; Burke, M.J. Measurement of the electrical properties of ungelled ECG electrodes. Int. J. Biol. Biomed. Eng. 2008, 2, 89–97. [Google Scholar]
- Pfurtscheller, G.; Neuper, C. Motor imagery activates primary sensorimotor area in humans. Neurosci. Lett. 1997, 239, 65–68. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C. Motor imagery and direct brain-computer communication. Proc. IEEE. 2001, 89, 1123–1134. [Google Scholar] [CrossRef]
- Kus, R.; Valbuena, D.; Zygierewicz, J. Asynchronous BCI Based on Motor Imagery with Automated Calibration and Neurofeedback Training. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 823–835. [Google Scholar] [CrossRef] [PubMed]
- Obermaier, B.; Neuper, C.; Guger, C.; Member, A.; Pfurtscheller, G. Information transfer rate in a five-classes brain-computer interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 283–288. [Google Scholar] [CrossRef] [PubMed]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, C.-C.; Chien, T.-Y.; Chen, Y.-C.; Tsai, S.-H.; Fang, W.-C.; Lin, B.-S. A Wearable Channel Selection-Based Brain-Computer Interface for Motor Imagery Detection. Sensors 2016, 16, 213. https://doi.org/10.3390/s16020213
Lo C-C, Chien T-Y, Chen Y-C, Tsai S-H, Fang W-C, Lin B-S. A Wearable Channel Selection-Based Brain-Computer Interface for Motor Imagery Detection. Sensors. 2016; 16(2):213. https://doi.org/10.3390/s16020213
Chicago/Turabian StyleLo, Chi-Chun, Tsung-Yi Chien, Yu-Chun Chen, Shang-Ho Tsai, Wai-Chi Fang, and Bor-Shyh Lin. 2016. "A Wearable Channel Selection-Based Brain-Computer Interface for Motor Imagery Detection" Sensors 16, no. 2: 213. https://doi.org/10.3390/s16020213
APA StyleLo, C. -C., Chien, T. -Y., Chen, Y. -C., Tsai, S. -H., Fang, W. -C., & Lin, B. -S. (2016). A Wearable Channel Selection-Based Brain-Computer Interface for Motor Imagery Detection. Sensors, 16(2), 213. https://doi.org/10.3390/s16020213