
Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot



Abstract
:
1. Introduction
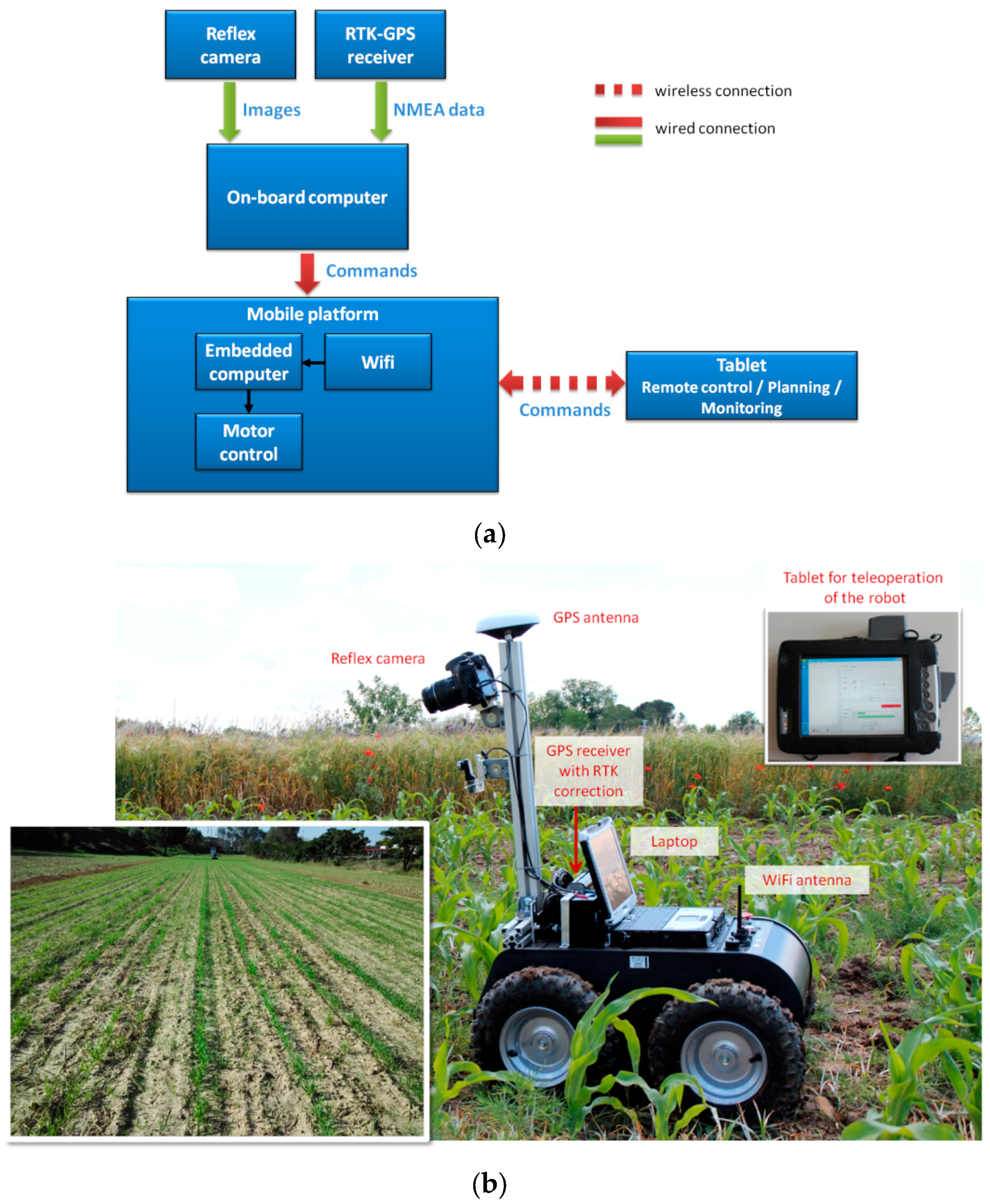
2. Materials and Methods
2.1. Crop Row Tracking Behaviour
2.1.1. Image Processing
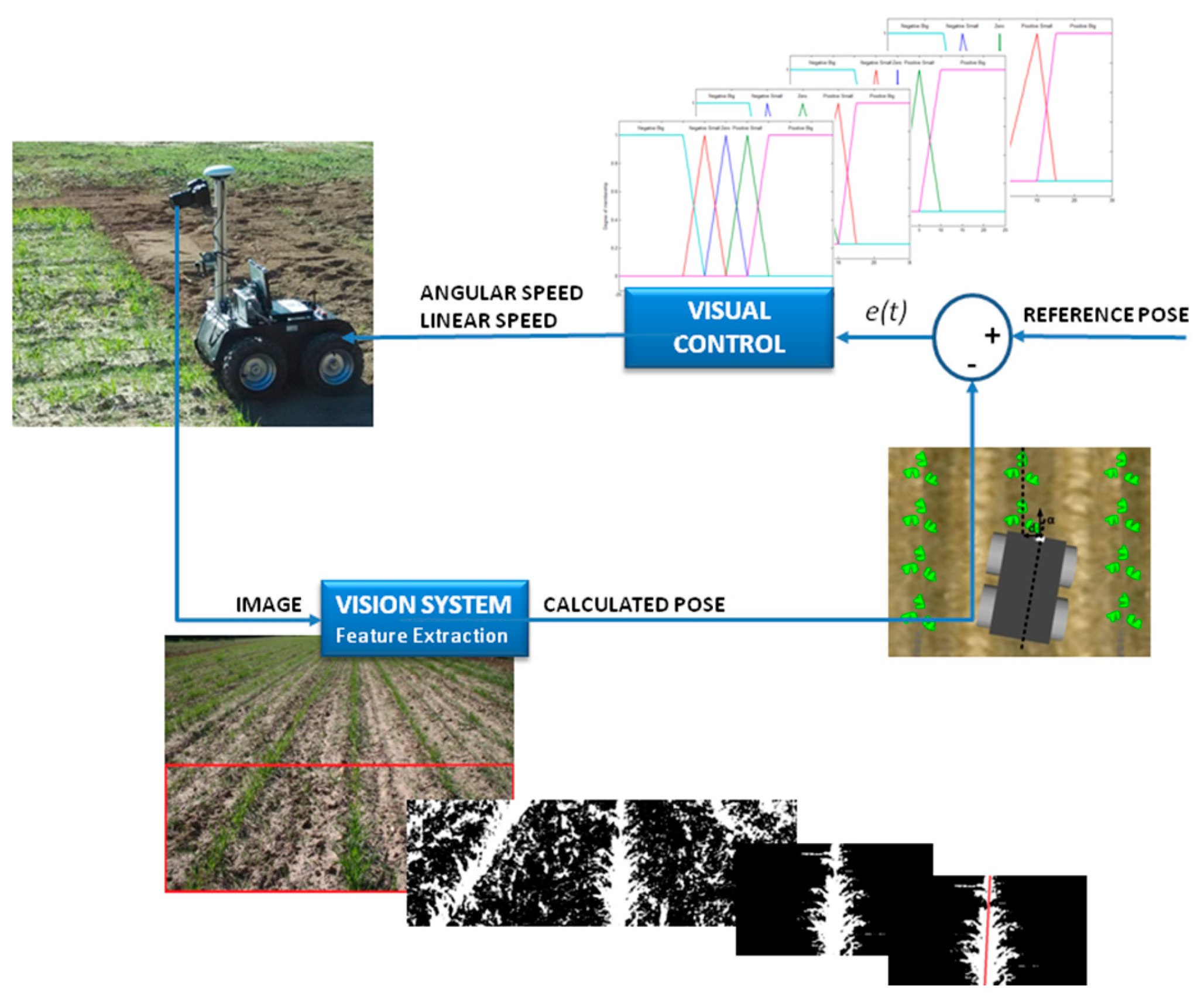
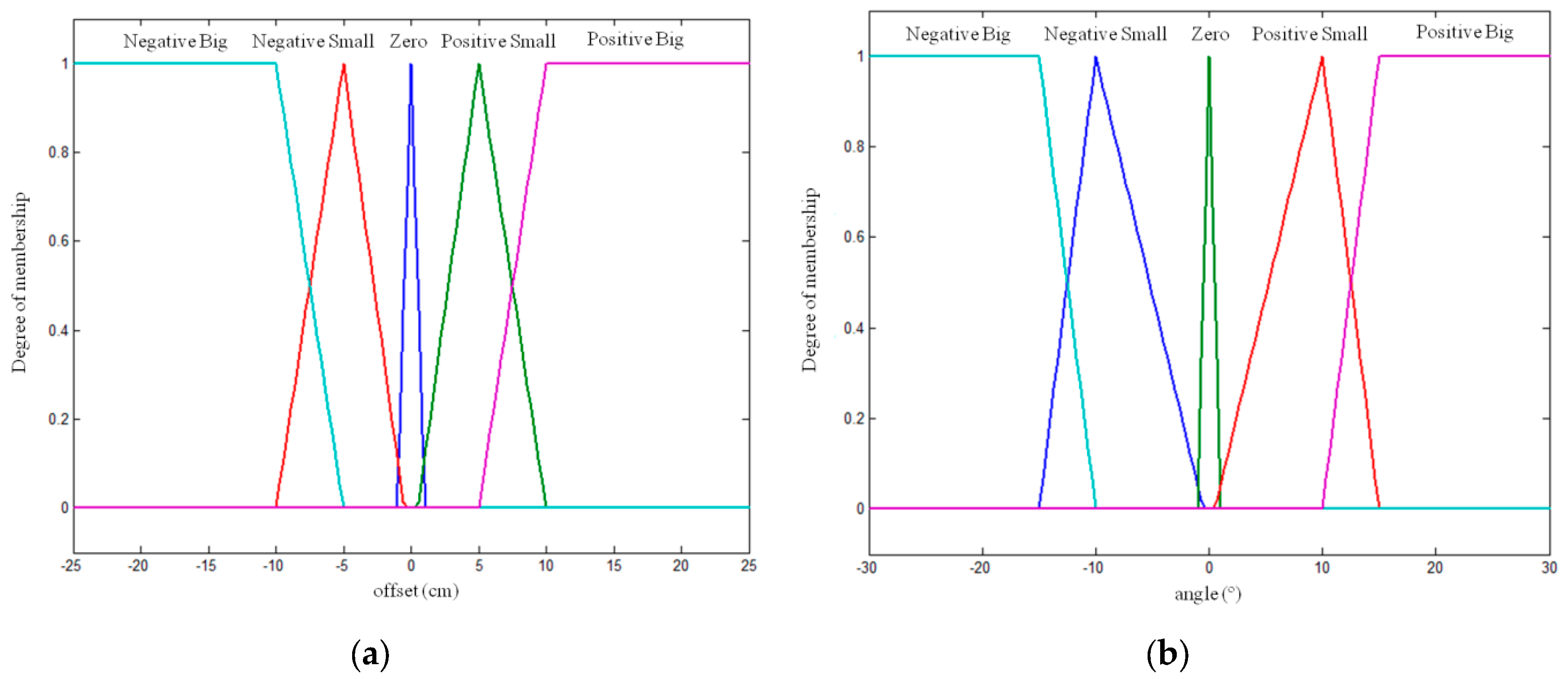
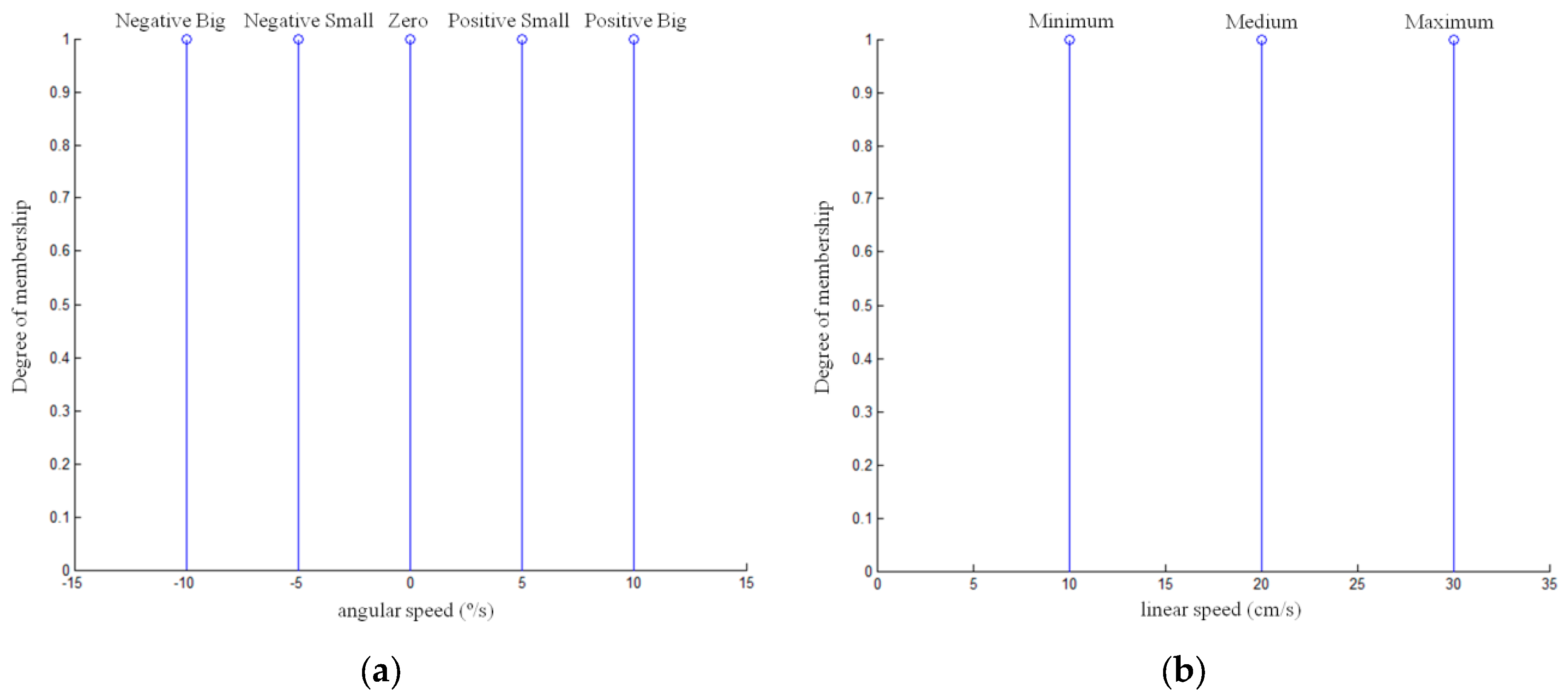
2.1.2. Navigation Control
2.2. End of Crop Row Detection
2.3. Row Change Behaviour
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CVRP | Capacited Vehicle Routing Problem |
| DSS | Decision Support System |
| FOG | Fibre Optic Gyroscope |
| GIS | Geographical Information System |
| GNSS | Global Navigation Satellite System |
| IMU | Inertial Measurement Unit |
| PA | Precision Agriculture |
| PID | Proportional Integral Derivative |
| RTK | Real Time Kinematic |
| ExG | Excess green index |
| b | coefficient of the blue plane |
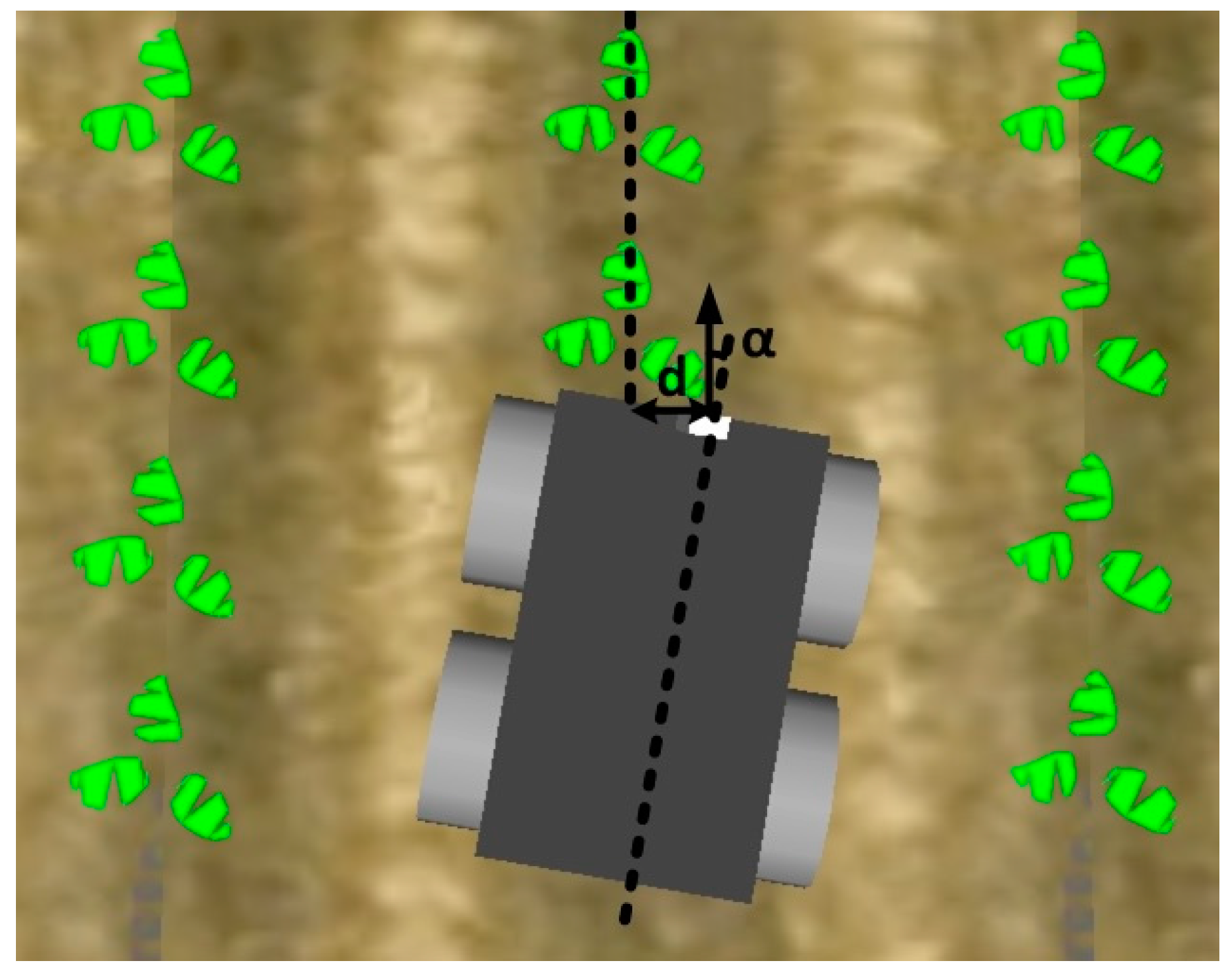
| d | distance |
| g | coefficient of the green plane |
| min_proportion | Percentage threshold |
| r | coefficient of the red plane |
| α | motion direction angle |
Lower distance threshold | |
Upper distance threshold |
References
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, A. Handbook of Precision Agriculture: Principles and Applications; Food Products Press: New York, NY, USA, 2006. [Google Scholar]
- Stafford, J.V. Implementing precision agriculture in the 21st century. J. Agric. Eng. Res. 2000, 76, 267–275. [Google Scholar] [CrossRef]
- Reid, J.F. The impact of mechanization on agriculture. Bridge Agric. Inf. Technol. 2011, 41, 22–29. [Google Scholar]
- Senay, G.B.; Ward, A.D.; Lyon, J.G.; Fausey, N.R.; Nokes, S.E. Manipulation of high spatial resolution aircraft remote sensing data for use in site-specific farming. Trans. ASAE 1998, 41, 489–495. [Google Scholar] [CrossRef]
- Rew, L.J.; Cousens, R.D. Spatial distribution of weeds in arable crops: are current sampling and analytical methods appropriate? Weed Res. 2001, 41, 1–18. [Google Scholar] [CrossRef]
- Marshall, E.J.P. Field-scale estimates of grass weed populations in arable land. Weed Res. 1988, 28, 191–198. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Giles, D.K.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Li, M.; Imou, K.; Wakabayashi, K.; Yokoyama, S. Review of research on agricultural vehicle autonomous guidance. Int. J. Agric. Biol. Eng. 2009, 2, 1–16. [Google Scholar]
- Stoll, A.; Kutzbach, H.D. Guidance of a forage harvester with GPS. Precis. Agric. 2000, 2, 281–291. [Google Scholar] [CrossRef]
- Blackmore, B.S.; Griepentrog, H.W.; Nielsen, H.; Nørremark, M.; Resting-Jeppesen, J. Development of a deterministic autonomous tractor. In Proceedings of the 2004 CIGR Olympics of Agricultural Engineering, Beijing, China, 11–14 October 2004.
- Gomez-Gil, J.; Alonso-Garcia, S.; Gómez-Gil, F.J.; Stombaugh, T. A simple method to improve autonomous GPS positioning for tractors. Sensors 2011, 11, 5630–5644. [Google Scholar] [CrossRef] [PubMed]
- Alonso-Garcia, S.; Gomez-Gil, J.; Arribas, J.I. Evaluation of the use of low-cost GPS receivers in the autonomous guidance of agricultural tractors. Spanish J. Agric. Res. 2011, 9, 377–388. [Google Scholar] [CrossRef]
- Eaton, R.; Katupitiya, J.; Siew, K.W.; Howarth, B. Autonomous farming: Modelling and control of agricultural machinery in a unified framework. Int. J. Intel. Syst. Technol. Appl. 2010, 8, 444–457. [Google Scholar] [CrossRef]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. The development of the autonomous tractor with steering controller applied by optimal control. In Proceeding of the 2002 Automation Technology for Off-Road Equipment, Chicago, IL, USA, 26–27 July 2002; pp. 367–373.
- Nagasaka, Y.; Umeda, N.; Kanetai, Y.; Taniwaki, K.; Sasaki, Y. Autonomous guidance for rice transplanting using global positioning and gyroscopes. Comput. Electron. Agric. 2004, 43, 223–234. [Google Scholar] [CrossRef]
- Noguchi, N.; Kise, M.; Ishii, K.; Terao, H. Field automation using robot tractor. In Proceeding of the 2002 Automation Technology for Off-Road Equipment, Chicago, IL, USA, 26–27 July 2002; pp. 239–245.
- Bak, T.; Jakobsen, H. Agricultural robotic platform with four wheel steering for weed detection. Biosyst. Eng. 2004, 87, 125–136. [Google Scholar] [CrossRef]
- Marchant, J.A.; Hague, T.; Tillett, N.D. Row-following accuracy of an autonomous vision-guided agricultural vehicle. Comput. Electron. Agric. 1997, 16, 165–175. [Google Scholar] [CrossRef]
- Billingsley, J.; Schoenfisch, M. The successful development of a vision guidance system for agriculture. Comput. Electron. Agric. 1997, 16, 147–163. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Chen, P.; Curley, R.G. Vision guided precision cultivation. Precis. Agric. 1999, 1, 199–217. [Google Scholar] [CrossRef]
- Tillett, N.D.; Hague, T. Computer-vision-based hoe guidance for cereals—An initial trial. J. Agric. Eng. Res. 1999, 74, 225–236. [Google Scholar] [CrossRef]
- Åstrand, B.; Baerveldt, A.-J. A vision based row-following system for agricultural field machinery. Mechatronics 2005, 15, 251–269. [Google Scholar] [CrossRef]
- Benson, E.R.; Reid, J.F.; Zhang, Q. Machine vision-based guidance system for agricultural grain harvesters using cut-edge detection. Biosyst. Eng. 2003, 86, 389–398. [Google Scholar] [CrossRef]
- Gottschalk, R.; Burgos-Artizzu, X.P.; Ribeiro, A.; Pajares, G. Real-time image processing for the guidance of a small agricultural field inspection vehicle. Int. J. Intel. Syst. Technol. Appl. 2010, 8, 434–443. [Google Scholar] [CrossRef]
- Kise, M.; Zhang, Q.; Rovira Más, F. A stereovision-based crop row detection method for tractor-automated guidance. Biosyst. Eng. 2005, 90, 357–367. [Google Scholar] [CrossRef]
- Sainz-Costa, N.; Ribeiro, A.; Burgos-Artizzu, X.P.; Guijarro, M.; Pajares, G. Mapping wide row crops with video sequences acquired from a tractor moving at treatment speed. Sensors 2011, 11, 7095–7109. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Søgaard, H.T.; Olsen, H.J. Determination of crop rows by image analysis without segmentation. Comput. Electron. Agric. 2003, 38, 141–158. [Google Scholar] [CrossRef]
- Hague, T.; Tillett, N.D.; Wheeler, H. Automated crop and weed monitoring in widely spaced cereals. Precis. Agric. 2006, 7, 21–32. [Google Scholar] [CrossRef]
- Hough, P.V. Method and Means for Recognizing Complex Patterns. US Patent US3069654 A, December 1962. [Google Scholar]
- Marchant, J.A. Tracking of row structure in three crops using image analysis. Comput. Electron. Agric. 1996, 15, 161–179. [Google Scholar] [CrossRef]
- Hague, T.; Marchant, J.A.; Tillett, D. A system for plant scale husbandry. Precis. Agric. 1997, 2, 635–642. [Google Scholar]
- Leemans, V.; Destain, M.-F. Application of the Hough transform for seed row localisation using machine vision. Biosyst. Eng. 2006, 94, 325–336. [Google Scholar] [CrossRef]
- Tellaeche, A.; Burgos-Artizzu, X.P.; Pajares, G.; Ribeiro, A. A vision-based method for weeds identification through the Bayesian decision theory. Pattern Recognit. 2008, 41, 521–530. [Google Scholar] [CrossRef]
- Tellaeche, A.; BurgosArtizzu, X.P.; Pajares, G.; Ribeiro, A.; Fernández-Quintanilla, C. A new vision-based approach to differential spraying in precision agriculture. Comput. Electron. Agric. 2008, 60, 144–155. [Google Scholar] [CrossRef]
- Tellaeche, A.; Pajares, G.; Burgos-Artizzu, X.P.; Ribeiro, A. A computer vision approach for weeds identification through Support Vector Machines. Appl. Soft Comput. 2011, 11, 908–915. [Google Scholar] [CrossRef] [Green Version]
- Kise, M.; Zhang, Q. Development of a stereovision sensing system for 3D crop row structure mapping and tractor guidance. Biosyst. Eng. 2008, 101, 191–198. [Google Scholar] [CrossRef]
- Vioix, J.-B.; Douzals, J.-P.; Truchetet, F.; Assémat, L.; Guillemin, J.-P. Spatial and spectral methods for weed detection and localization. EURASIP J. Appl. Sign. Process. 2002, 2002, 679–685. [Google Scholar] [CrossRef]
- Bossu, J.; Gée, C.; Guillemin, J.P.; Truchetet, F. Development of methods based on double Hough transform and Gabor filtering to discriminate crop and weeds in agronomic images. In Proceedings of the SPIE 18th Annual Symposium Electronic Imaging Science and Technology, San Jose, CA, USA, 15–19 January 2006.
- Bossu, J.; Gée, C.; Jones, G.; Truchetet, F. Wavelet transform to discriminate between crop and weed in perspective agronomic images. Comput. Electron. Agric. 2009, 65, 133–143. [Google Scholar] [CrossRef]
- Romeo, J.; Pajares, G.; Montalvo, M.; Guerrero, J.M.; Guijarro, M.; Ribeiro, A. Crop row detection in maize fields inspired on the human visual perception. Sci. World J. 2012, 2012. [Google Scholar] [CrossRef] [PubMed]
- Conesa-Muñoz, J.; Gonzalez-de-Soto, M.; Gonzalez-de-Santos, P.; Ribeiro, A. Distributed multi-level supervision to effectively monitor the operations of a fleet of autonomous vehicles in agricultural tasks. Sensors 2015, 15, 5402–5428. [Google Scholar] [CrossRef] [PubMed]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Conesa-Munoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Efficient Distribution of a Fleet of Heterogeneous Vehicles in Agriculture: A Practical Approach to Multi-path Planning. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Vila Real, Portugal, 8–10 April 2015; pp. 56–61.
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Andreasen, C.; Rudemo, M.; Sevestre, S. Assessment of weed density at an early stage by use of image processing. Weed Res. 1997, 37, 5–18. [Google Scholar] [CrossRef]
- Perez, A.J.; Lopez, F.; Benlloch, J.V.; Christensen, S. Colour and shape analysis techniques for weed detection in cereal fields. Comput. Electron. Agric. 2000, 25, 197–212. [Google Scholar] [CrossRef]
- Aitkenhead, M.J.; Dalgetty, I.A.; Mullins, C.E.; McDonald, A.J.S.; Strachan, N.J.C. Weed and crop discrimination using image analysis and artificial intelligence methods. Comput. Electron. Agric. 2003, 39, 157–171. [Google Scholar] [CrossRef]
- Yang, C.-C.; Prasher, S.O.; Landry, J.-A.; Ramaswamy, H.S. Development of an image processing system and a fuzzy algorithm for site-specific herbicide applications. Precis. Agric. 2003, 4, 5–18. [Google Scholar] [CrossRef]
- Ribeiro, A.; Fernández-Quintanilla, C.; Barroso, J.; García-Alegre, M.C.; Stafford, J.V. Development of an image analysis system for estimation of weed pressure. In Proceedings of 5th European Conference on Precision Agriculture, Uppsala, Sweden, 9–12 June 2005; pp. 169–174.
- Van Evert, F.K.; Van Der Heijden, G.W.; Lotz, L.A.; Polder, G.; Lamaker, A.; De Jong, A.; Kuyper, M.C.; Groendijk, E.J.; Neeteson, J.J.; Van der Zalm, T. A Mobile Field Robot with Vision-Based Detection of Volunteer Potato Plants in a Corn Crop. Weed Technol. 2006, 20, 853–861. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Tellaeche, A.; Pajares, G.; Fernández-Quintanilla, C. Analysis of natural images processing for the extraction of agricultural elements. Image Vision Comput. 2010, 28, 138–149. [Google Scholar] [CrossRef]
- Bengochea-Guevara, J.M.; Burgos Artizzu, X.P.; Ribeiro, A. Real-time image processing for crop/weed discrimination in wide-row crops. In Proceedings of RHEA, Madrid, Spain, 21–23 May 2014; pp. 477–488.
- Sheikholeslam, S.; Desoer, C. Design of decentralized adaptive controllers for a class of interconnected nonlinear dynamical systems. In Proceedings of the 31st IEEE Conference on Decision and Control, Tucson, AZ, USA, 16–18 December 1992; pp. 284–288.
- Rossetter, E.J.; Gerdes, J.C. Performance guarantees for hazard based lateral vehicle control. In Proceedings of the ASME 2002 International Mechanical Engineering Congress and Exposition, New Orleans, LA, USA, 17–22 November 2002; pp. 731–738.
- Pomerleau, D.A. Alvinn: An Autonomous Land Vehicle in a Neural Network; Technical Report CMU-CS-89–107; Carnegie Mellon University: Pittsburgh, PA, USA, 1989. [Google Scholar]
- Sugeno, M. On stability of fuzzy systems expressed by fuzzy rules with singleton consequents. IEEE Trans. Fuzzy Syst. 1999, 7, 201–224. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Fraichard, T.; Garnier, P. Fuzzy control to drive car-like vehicles. Rob. Autom. Syst. 2001, 34, 1–22. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Sotelo, M.; Gonzalez, C.; Garcia, R.; Sotelo, M.A. Using fuzzy logic in automated vehicle control. IEEE Intell. Syst. 2007, 22, 36–45. [Google Scholar] [CrossRef]
- Pradhan, S.K.; Parhi, D.R.; Panda, A.K. Fuzzy logic techniques for navigation of several mobile robots. Appl. Soft Comput. 2009, 9, 290–304. [Google Scholar] [CrossRef]
- Kodagoda, K.R.S.; Wijesoma, W.S.; Teoh, E.K. Fuzzy speed and steering control of an AGV. IEEE Trans. Control Syst. Technol. 2002, 10, 112–120. [Google Scholar] [CrossRef]
- Antonelli, G.; Chiaverini, S.; Fusco, G. A fuzzy-logic-based approach for mobile robot path tracking. IEEE Trans. Fuzzy Syst. 2007, 15, 211–221. [Google Scholar] [CrossRef]
- Digital.CSIC. Avalaible online: http://digital.csic.es/handle/10261/110162 (accessed on 11 December 2015).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Current Pixel | Distance d (in pixels) until next non-Black Pixel | ||
|---|---|---|---|
| White | Mark all pixels from p to n and jump to n (p←n) | Mark all pixels from p to n and jump to n (p←n) | Stops |
| Border | Mark all pixels from p to n and jump to n (p←n) | IF White pixels(input(1…N), p…n)) > min_proportion THEN Mark all pixels from p to n and jump to n (p = n) ELSE Stops | Stops |
| Black | Jump to n (pn) | Jump to n (pn) | Stops |
| Offset d | Negative Big | Negative Small | Zero | Positive Small | Positive Big | |
|---|---|---|---|---|---|---|
| Angle α | ||||||
| Negative Big | Positive Big | Positive Big | Positive Big | Positive Small | Zero | |
| Negative Small | Positive Big | Positive Small | Positive Small | Zero | Negative Small | |
| Zero | Positive Big | Positive Small | Zero | Negative Small | Negative Big | |
| Positive Small | Positive Small | Zero | Negative Small | Negative Small | Negative Big | |
| Positive Big | Zero | Negative Small | Negative Big | Negative Big | Negative Big | |
| Offset d | Negative Big | Negative Small | Zero | Positive Small | Positive Big | |
|---|---|---|---|---|---|---|
| Angle α | ||||||
| Negative Big | Minimum | Minimum | Minimum | Minimum | Minimum | |
| Negative Small | Minimum | Minimum | Medium | Medium | Medium | |
| Zero | Minimum | Medium | Maximum | Medium | Minimum | |
| Positive Small | Medium | Medium | Medium | Minimum | Minimum | |
| Positive Big | Minimum | Minimum | Minimum | Minimum | Minimum | |
| Approach | Effectiveness (%) | Mean Processing Time (seconds) |
|---|---|---|
| Proposed approach | 96.4 | 0.069 |
| Hough-transform-based approach | 88.4 | 0.258 |
| Test environment | Mean | Std. dev. | Minimum | Maximum |
|---|---|---|---|---|
| Linear speed (cm/s) | 28.66 | 0.68 | 26.20 | 30.00 |
| Angular speed (°/s) | −0.57 | 0.53 | −2.00 | 0.00 |
| Offset (cm) | 0.55 | 0.47 | −0.78 | 1.88 |
| Angle (°) | 0.52 | 0.38 | −0.56 | 1.51 |
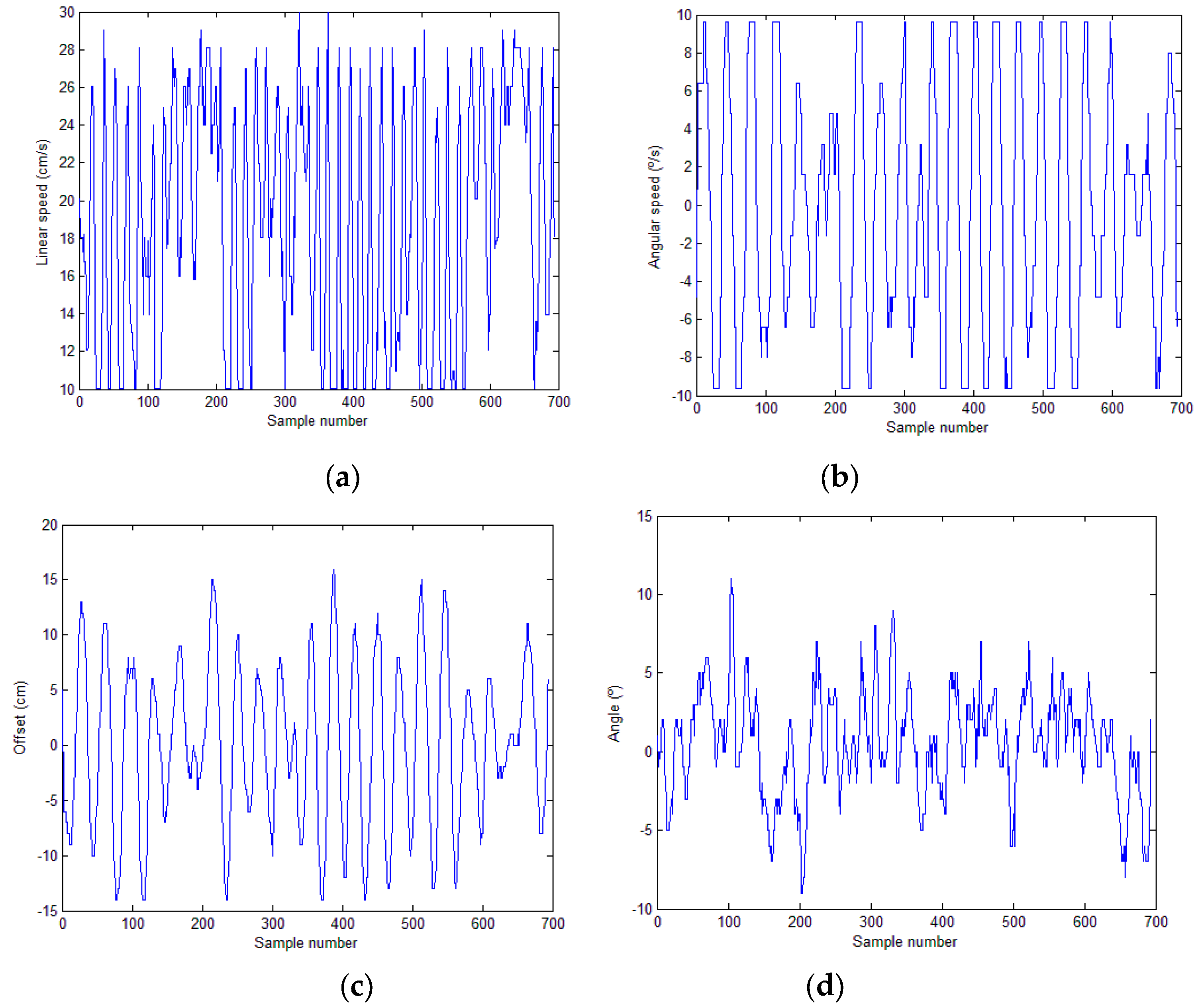
| Real Field | Mean | Std. dev. | Minimum | Maximum |
|---|---|---|---|---|
| Linear speed (cm/s) | 18.87 | 6.16 | 10.04 | 29.94 |
| Angular speed (°/s) | −0.14 | 6.40 | −9.60 | 9.60 |
| Offset (cm) | 0.05 | 7.33 | −14.00 | 16.00 |
| Angle (°) | 0.53 | 3.32 | −9.00 | 11.00 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bengochea-Guevara, J.M.; Conesa-Muñoz, J.; Andújar, D.; Ribeiro, A. Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors 2016, 16, 276. https://doi.org/10.3390/s16030276
Bengochea-Guevara JM, Conesa-Muñoz J, Andújar D, Ribeiro A. Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors. 2016; 16(3):276. https://doi.org/10.3390/s16030276
Chicago/Turabian StyleBengochea-Guevara, José M., Jesus Conesa-Muñoz, Dionisio Andújar, and Angela Ribeiro. 2016. "Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot" Sensors 16, no. 3: 276. https://doi.org/10.3390/s16030276
APA StyleBengochea-Guevara, J. M., Conesa-Muñoz, J., Andújar, D., & Ribeiro, A. (2016). Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors, 16(3), 276. https://doi.org/10.3390/s16030276