1. Introduction
Reliability and availability are key problems for safety-critical systems such as aircraft, wind turbines, bridges and nuclear plants [
1,
2]. However, conventional maintenance frameworks may involve longer downtime and greater cost without considering the actual status of the systems [
3]. In recent years, prognostics and health management (PHM) techniques, which consider the actual system condition via diagnostic techniques and the future condition through prognosis methods, have drawn widespread attention due to their ability to enable maintenance activities based on need [
4,
5,
6]. Accurate prognosis for the degradation state and failure time of the critical structure plays an important role in the PHM technique, which leads to an increase of reliability and availability. Moreover, the life cycle cost will be reduced by undertaking maintenance activities only as necessary and minimizing downtime and spare part storage.
Fatigue cracks are commonly regarded as a principal failure mode for various structural and mechanical systems [
7,
8]. In recent years, a lot of attention has been paid to the methods which combine fatigue crack propagation models with Bayes’ theorem for fatigue crack propagation prognosis, including stochastic filters [
9,
10,
11,
12,
13,
14,
15] and the Bayesian inference [
16,
17,
18]. Within these methods, the uncertainties during fatigue crack propagation are taken into account. The measurement information of the actual crack propagation state is used to update the result obtained by the crack propagation model to achieve a more accurate one. As to stochastic filters, the Kalman filter (KF) [
19] offers the optimal solution to linear problems under Gaussian uncertainty assumption. Nevertheless, most realistic cases such as the process of fatigue crack propagation are nonlinear with non-Gaussian uncertainty. To tackle these cases, various types of approximation are developed for the KF [
20]. The extended Kalman filter (EKF) utilizes the first-order Taylor expansion of the nonlinear model to solve the fatigue crack propagation problem [
9]. The unscented Kalman filter (UKF) is proposed to deal with the fatigue crack propagation problem using unscented transformation [
10]. However, the Gaussian uncertainty assumption is still needed for the EKF and UKF. As an improvement of the KF, the particle filter (PF) is capable of handling the prognosis problem of nonlinear and non-Gaussian processes without restrictive assumptions based on Monte Carlo methods [
21]. In recent years, several PF based methods have been reported for fatigue crack propagation prognosis. Shin
et al. [
11] adopted the PF to deal with the prognosis problem of fatigue crack propagation. The visual inspections performed by an optical magnifier were used as the measurements of the crack lengths. Corbetta
et al. [
12] proposed a kind of stochastic dynamic state space model for the PF based method, which utilized the crack lengths obtained with a caliper as the measurements. Compare and Zio [
13] proposed a PF-based method for predictive maintenance, in which simulated crack lengths were employed for validation. Sun
et al. [
14] analyzed the sources of uncertainties in fatigue crack propagation prognosis using Virkler’s data which was measured by a zoom stereomicroscope and explored a PF-based algorithm for uncertainty management. All these studies indicate that the PF has the potential for fatigue crack propagation prognosis under uncertainties.
However, most literatures published so far have only used simulation or off-line NDT results, which have limitations for on-line application. On-line crack monitoring is capable of offering convenient and quick inspections of crack damages with sensors. Timely detection and prognosis of crack damages can maximize the operational availability and safety by optimizing operation and maintenance strategies in real-time. Recently, on-line crack monitoring methods have been gradually combined with PF-based methods to realize on-line crack propagation prognosis. For example, Chen
et al. [
15] proposed a PF-based method for the machine condition prediction, in which the vibration feature extraction method is applied for crack monitoring. However, vibration feature extraction- based methods are insensitive to small damage or damage growth [
22]. In general, research on prognosis methods integrating on-line crack monitoring with the PF is still lacking, as well as experimental verifications. With the development of the structural health monitoring (SHM) technology, different kinds of methods have been developed for on-line crack monitoring [
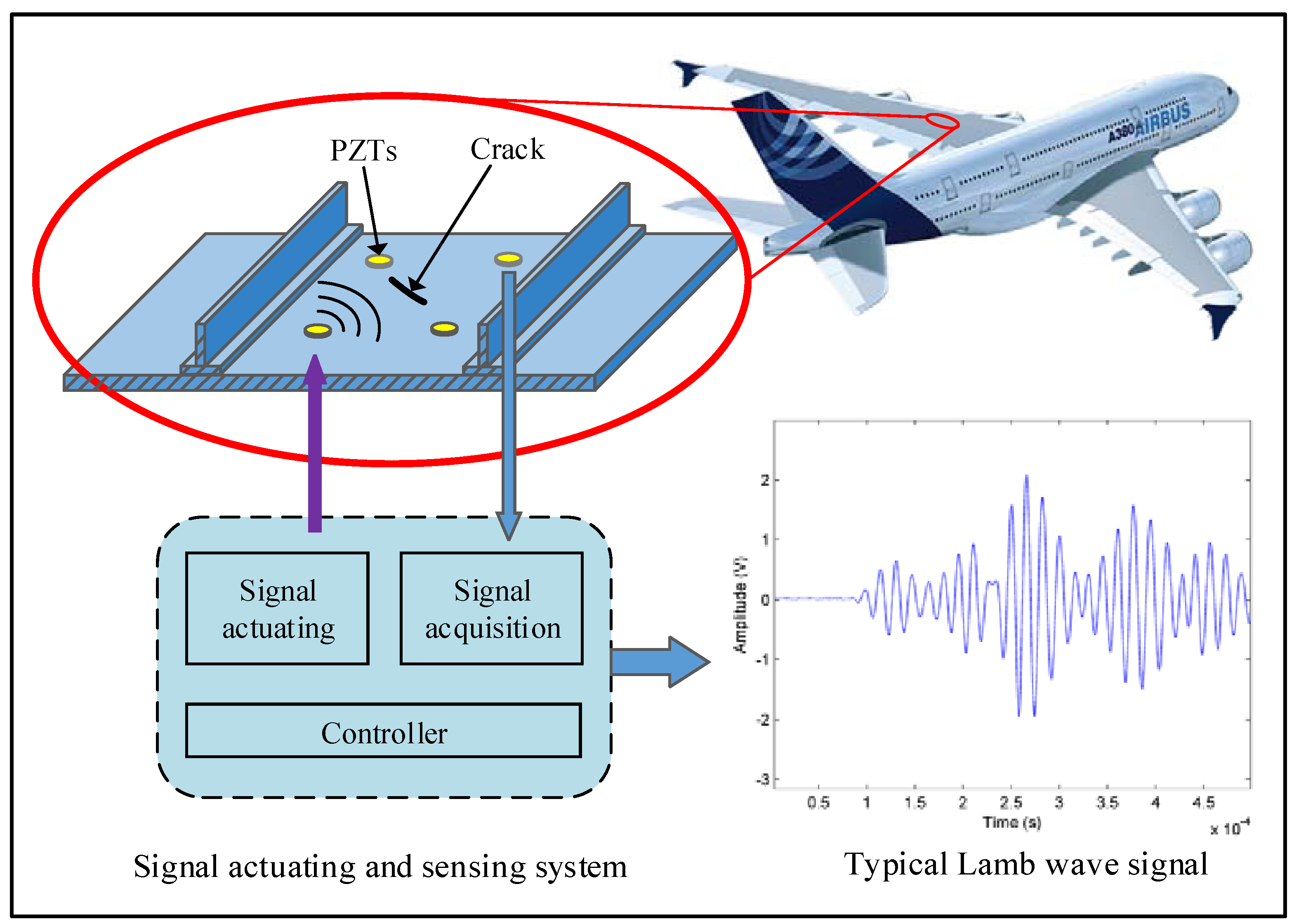
23]. Among them, The PZTs-based active Lamb wave (LW) technique is one of the most appealing and effective methods [
24,
25,
26], which has the merits including the ability of traveling a long distance, the capacity to access hidden components, as well as sensitivity to small crack damages [
27,
28].
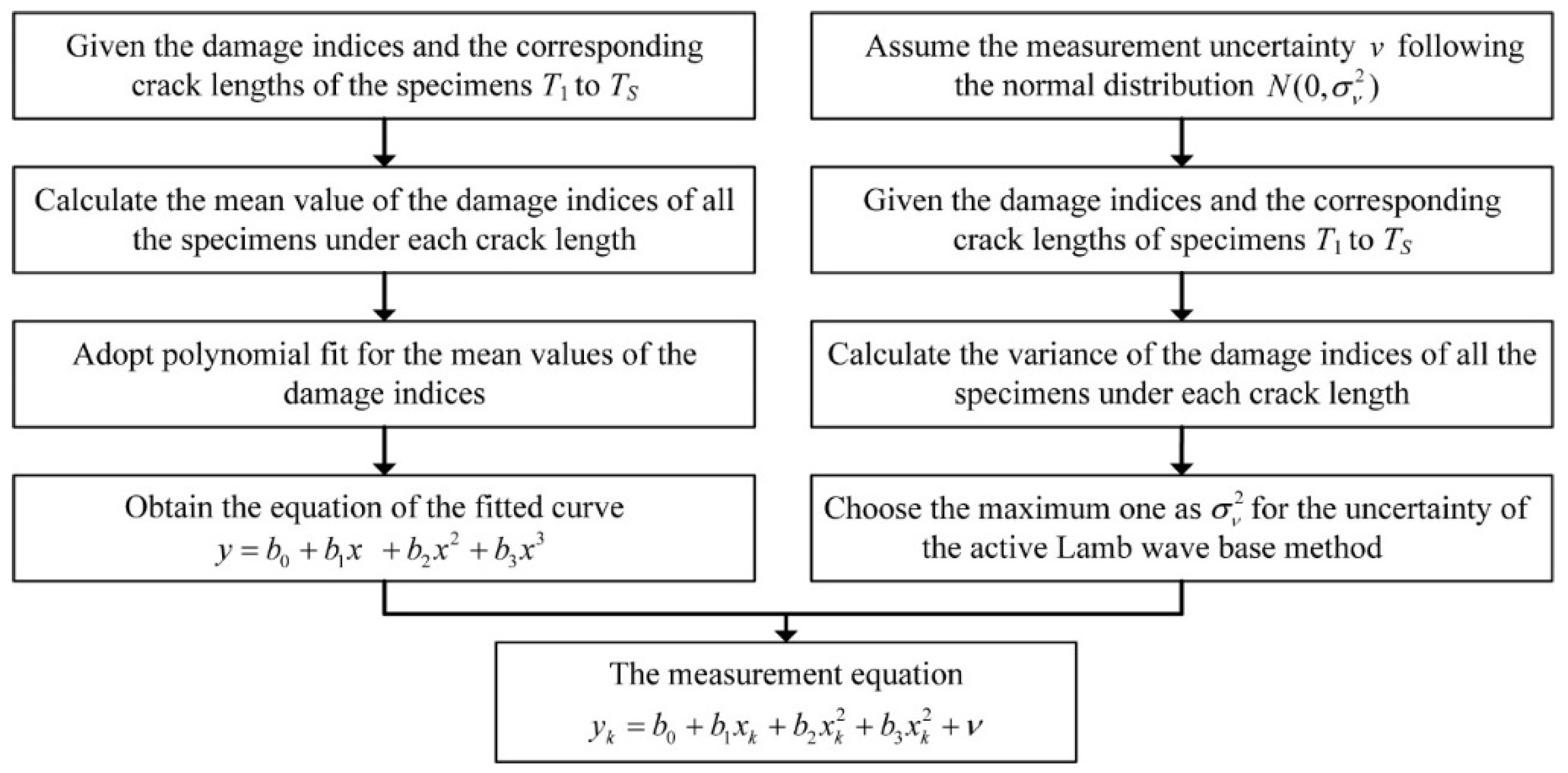
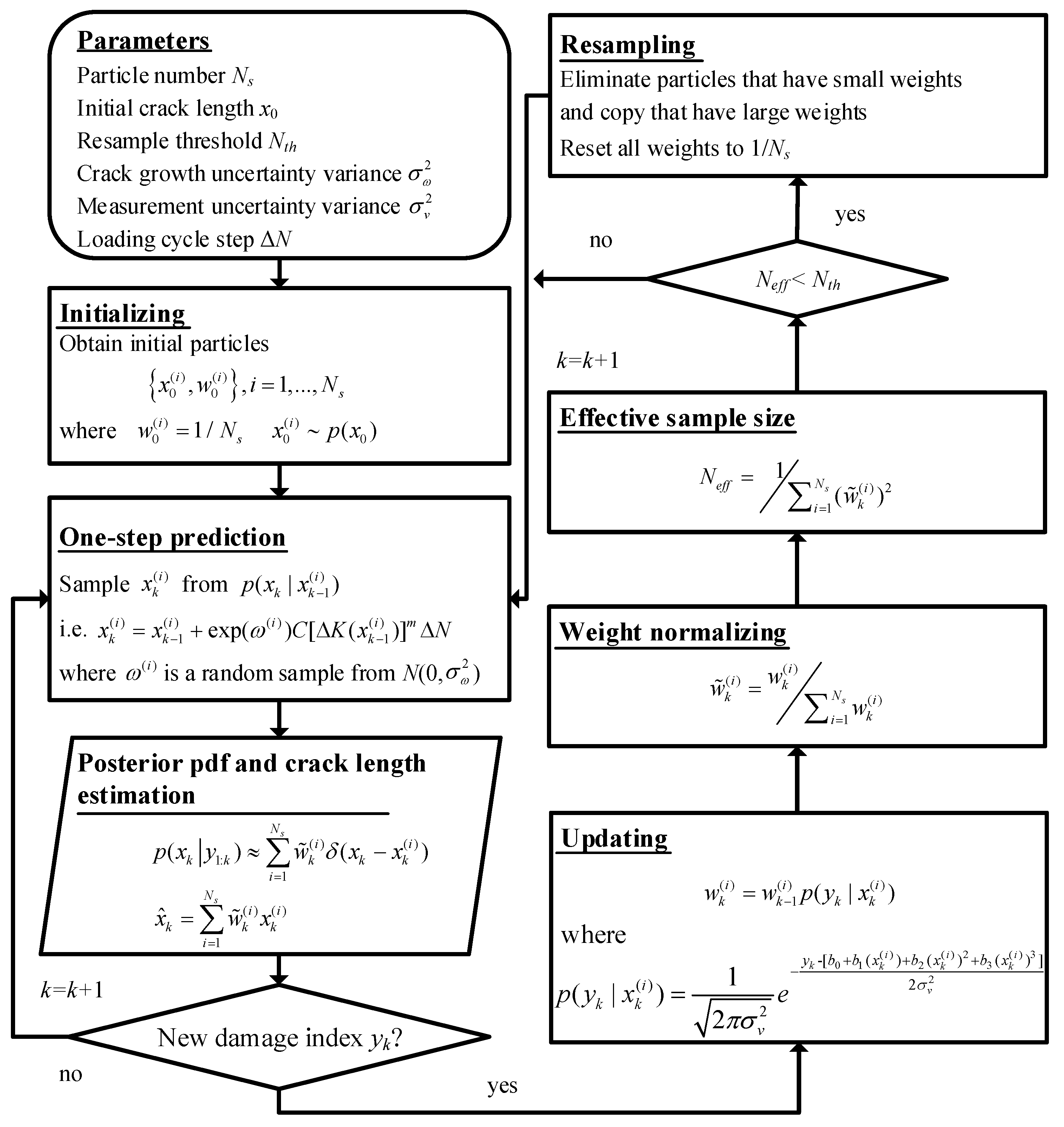
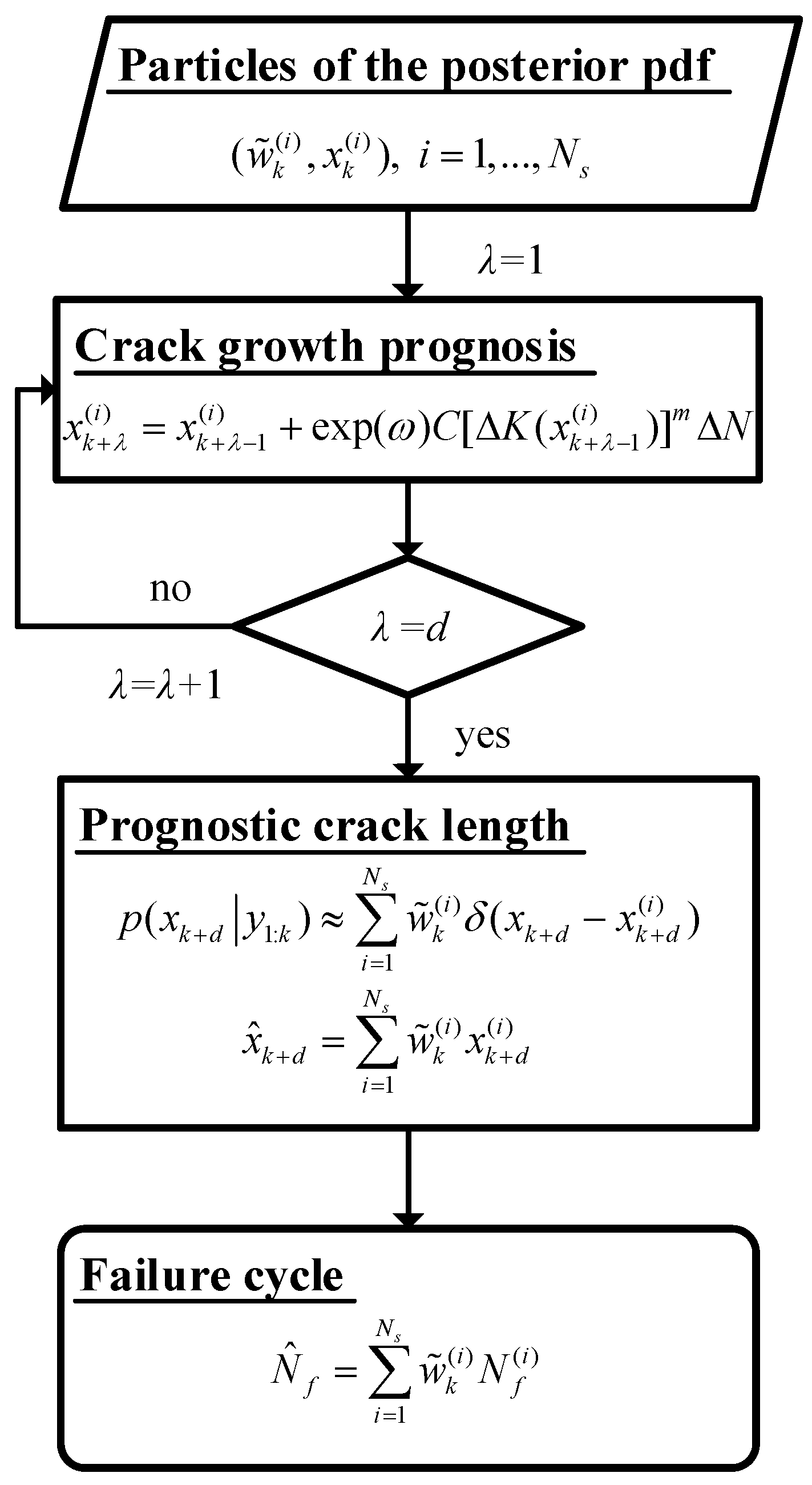
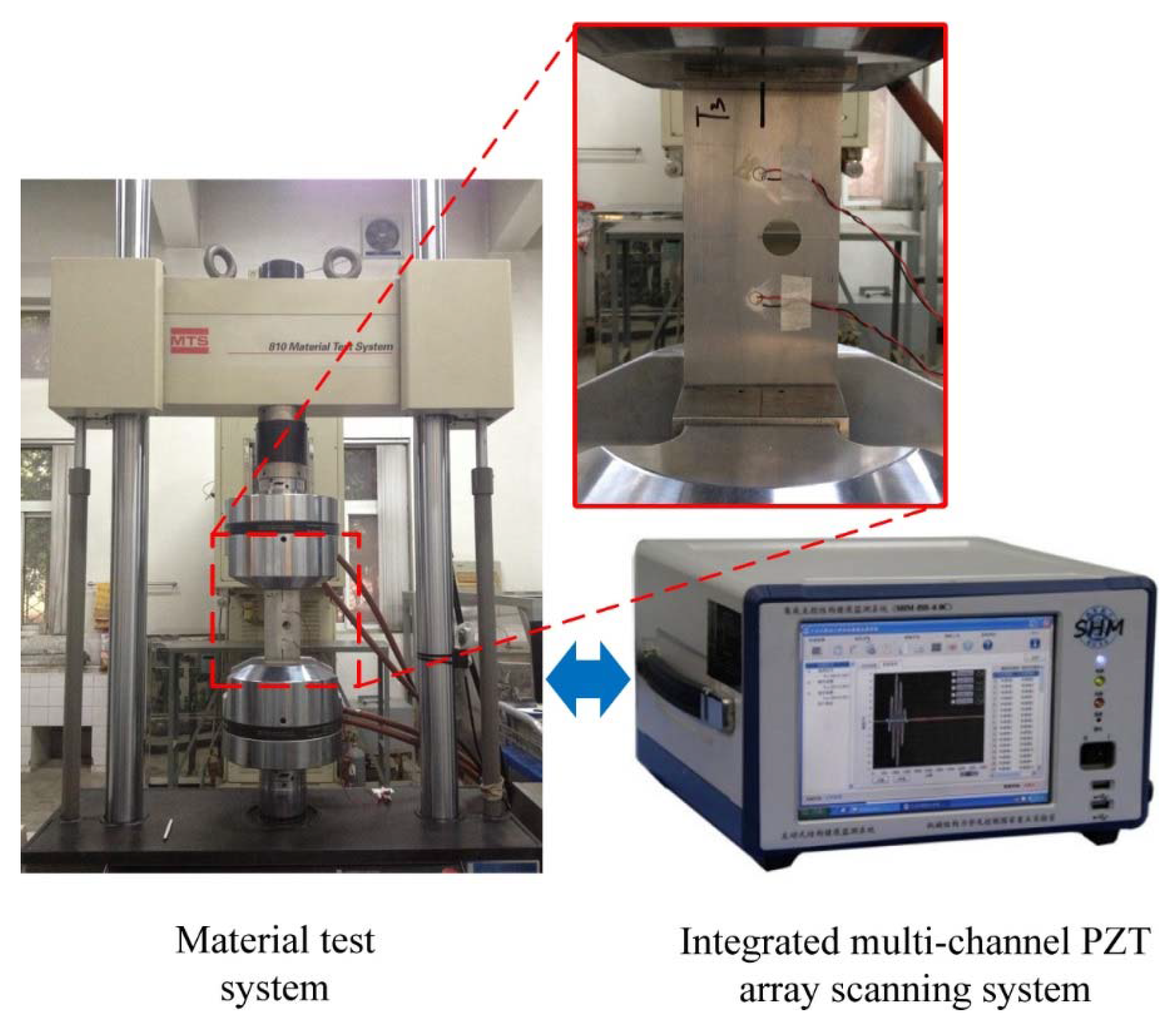
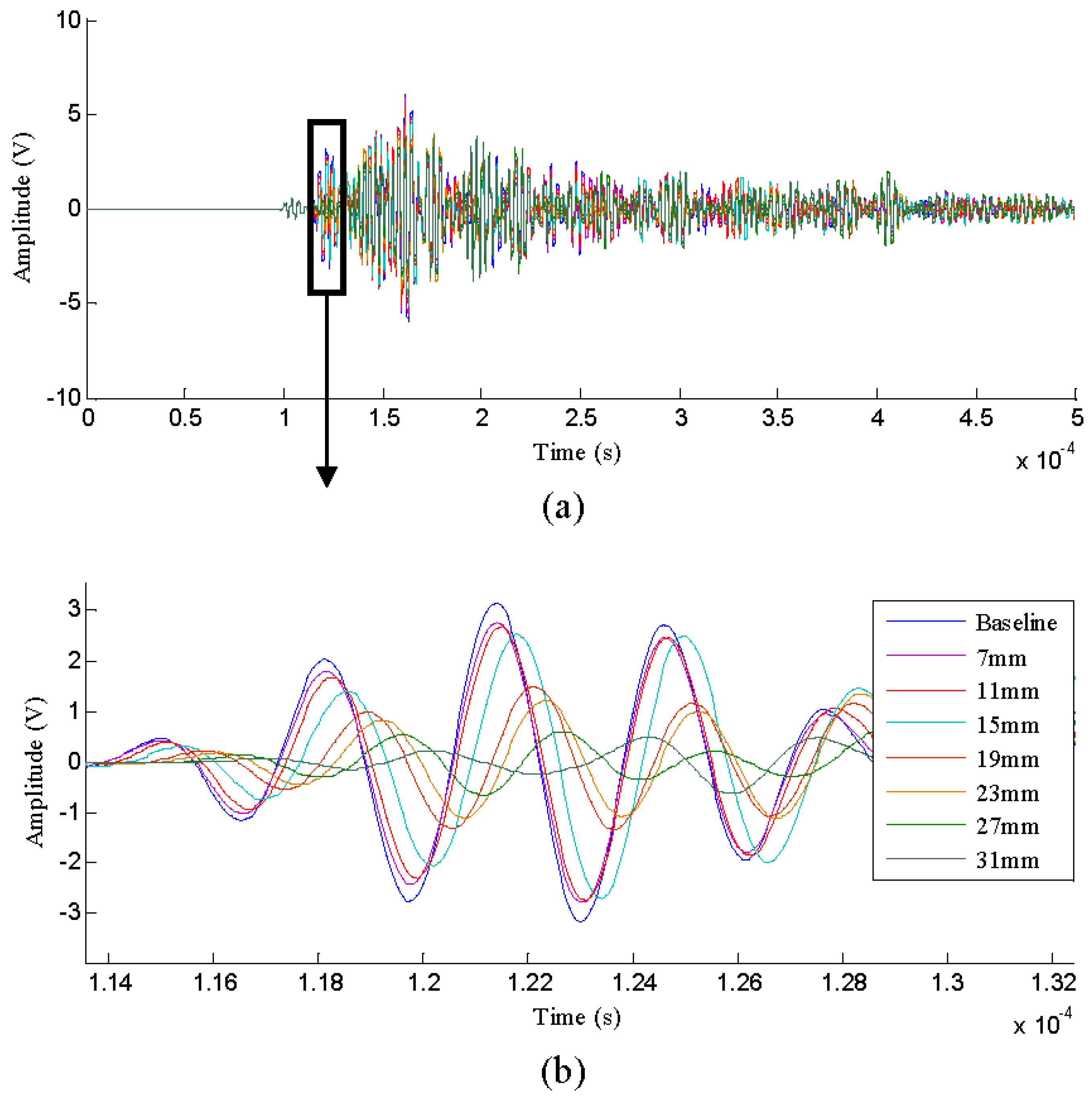
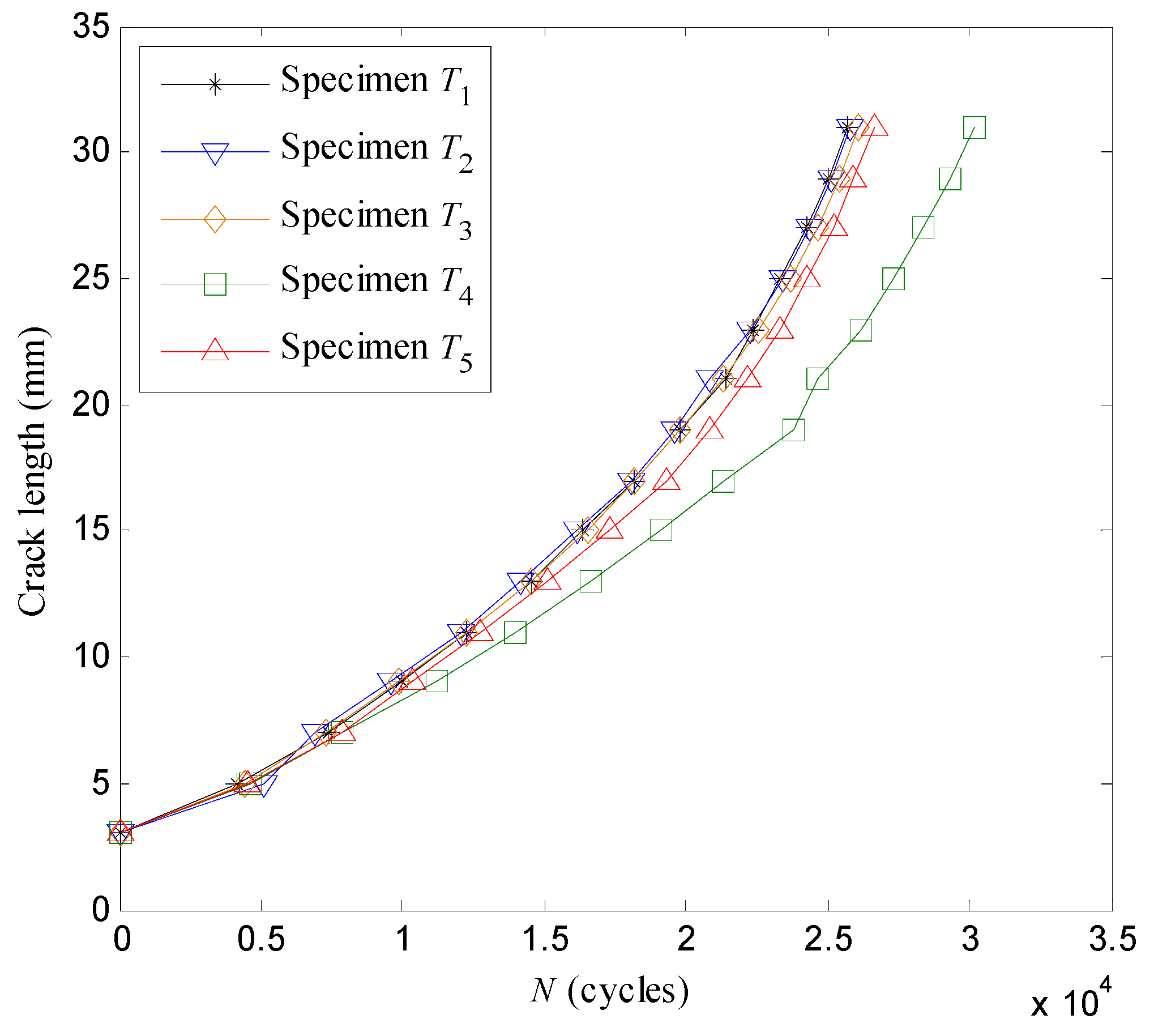
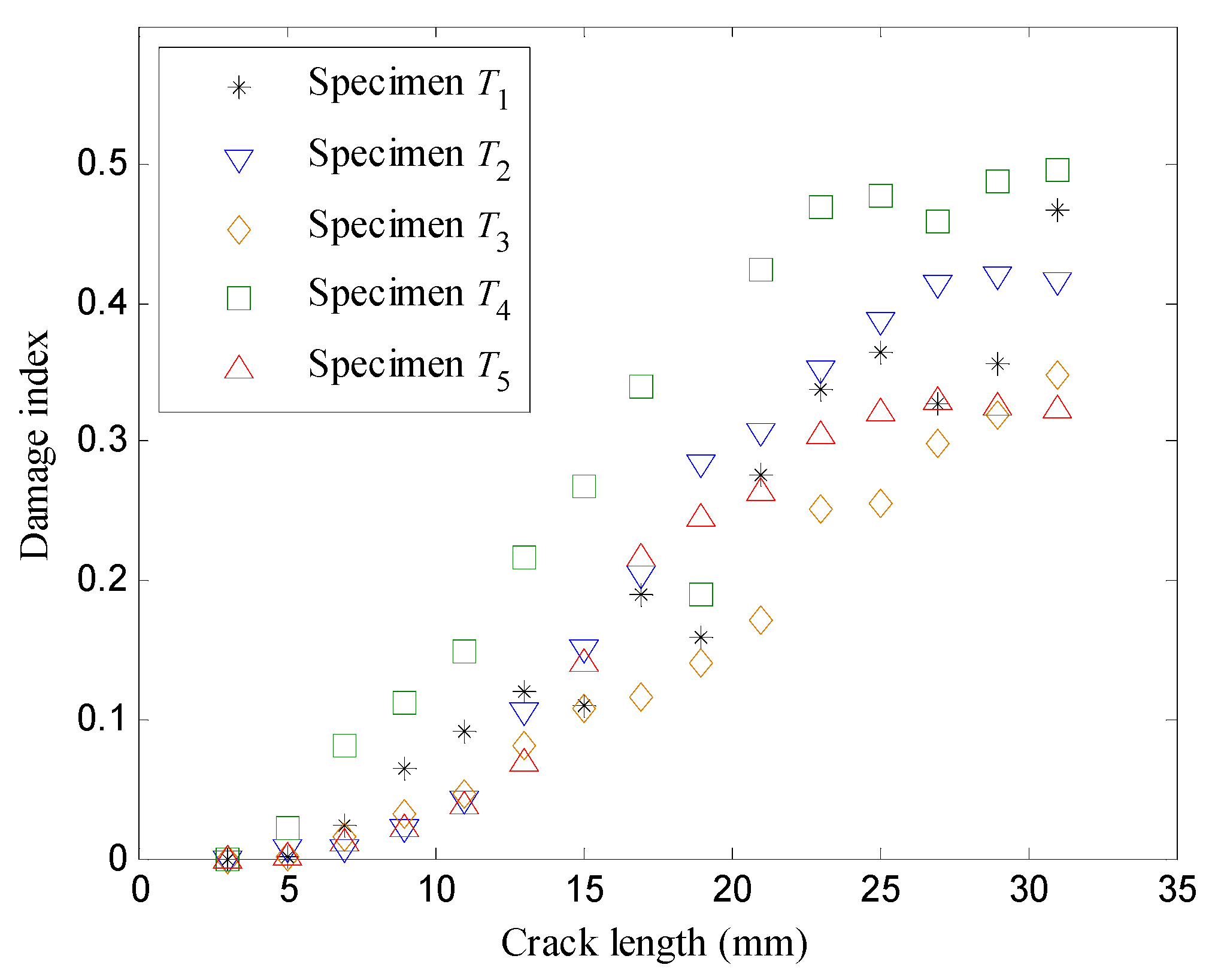
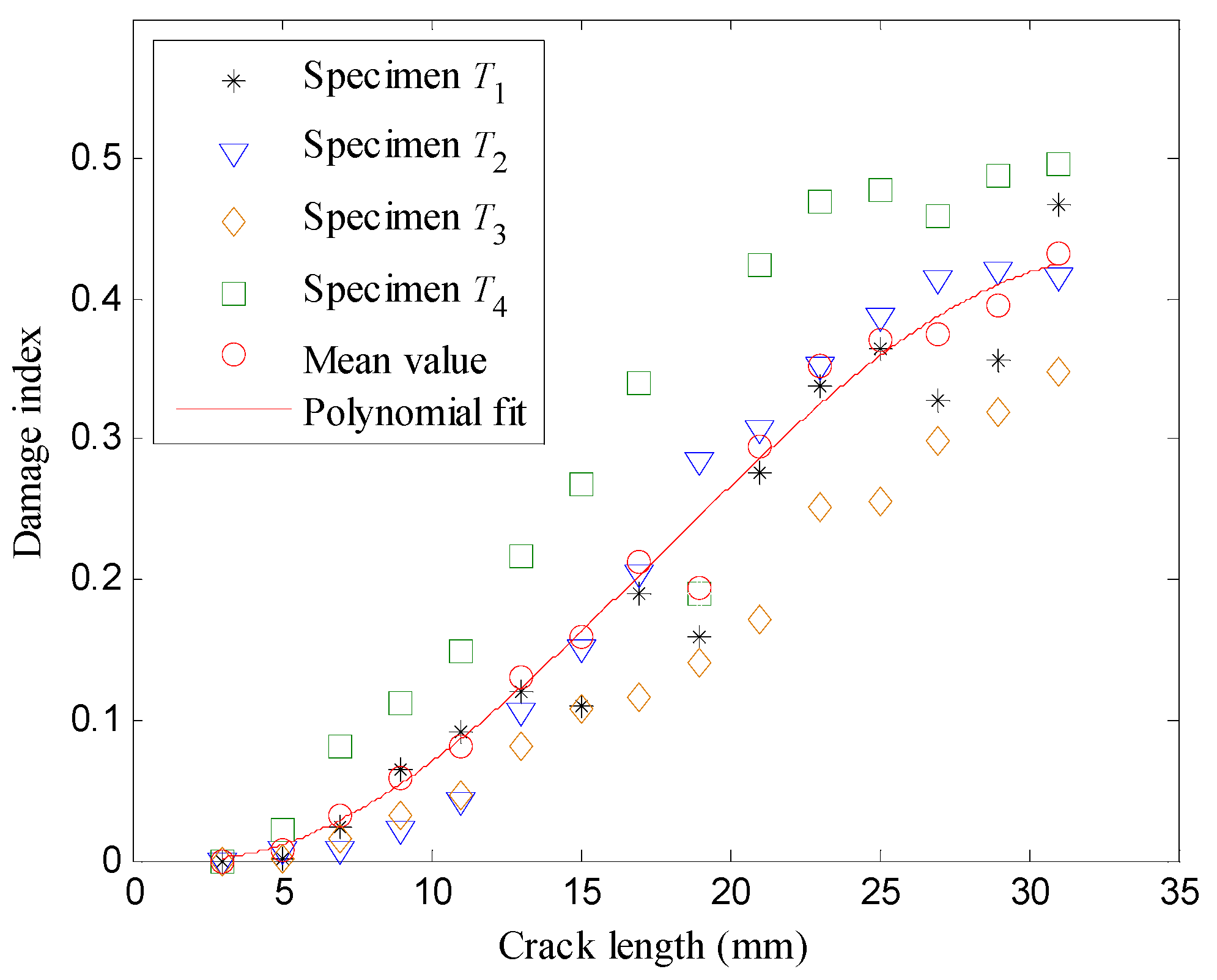
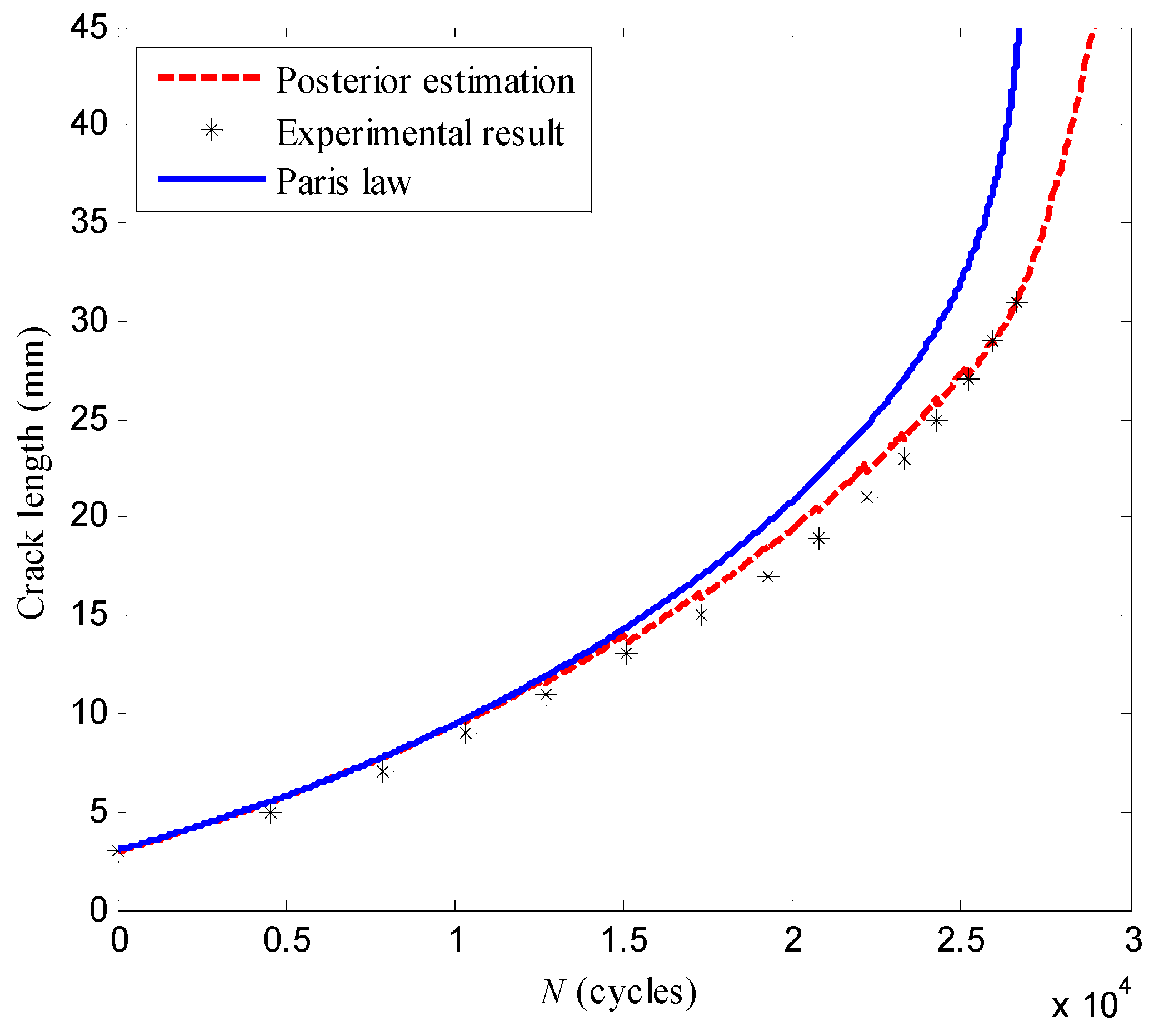
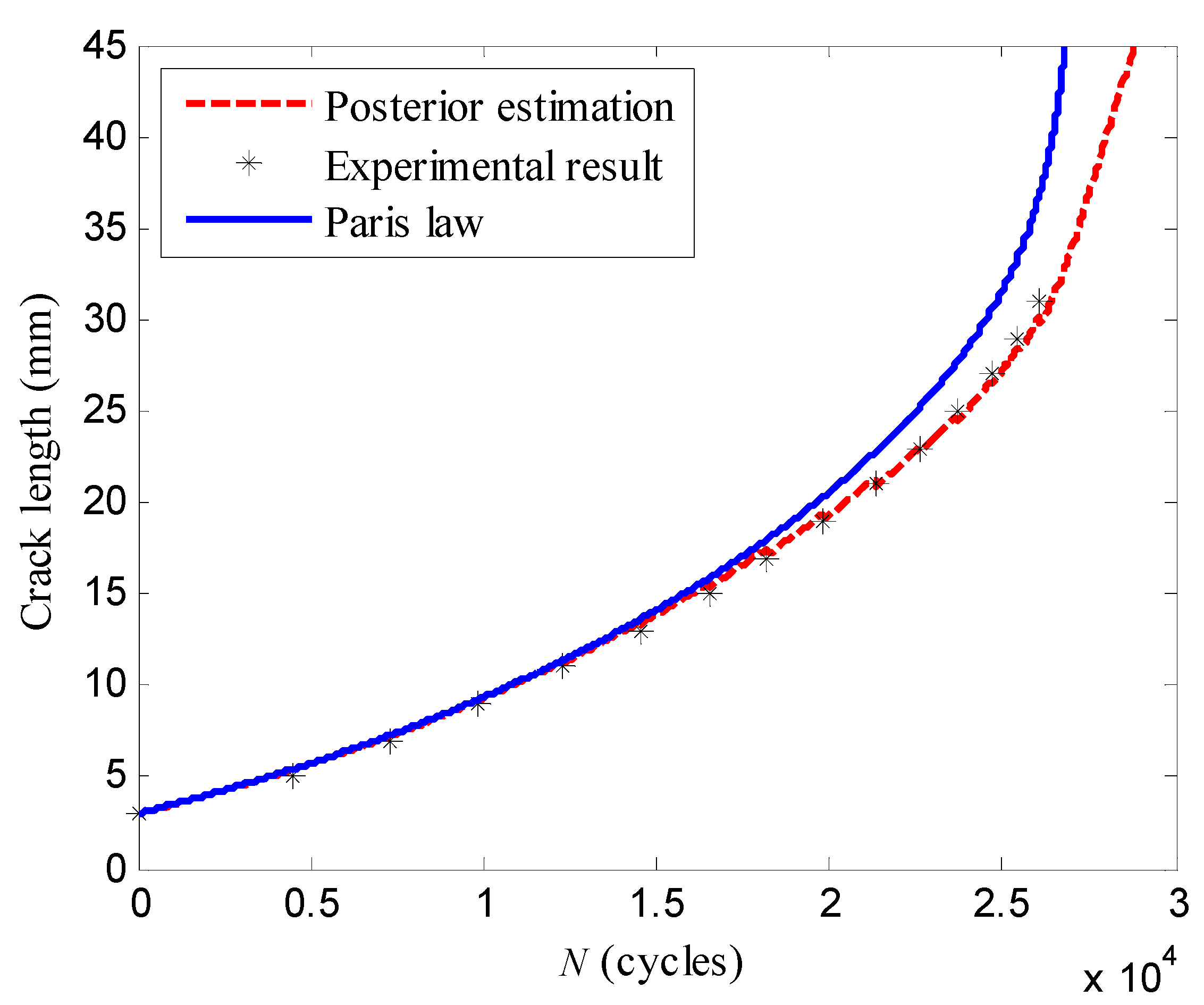
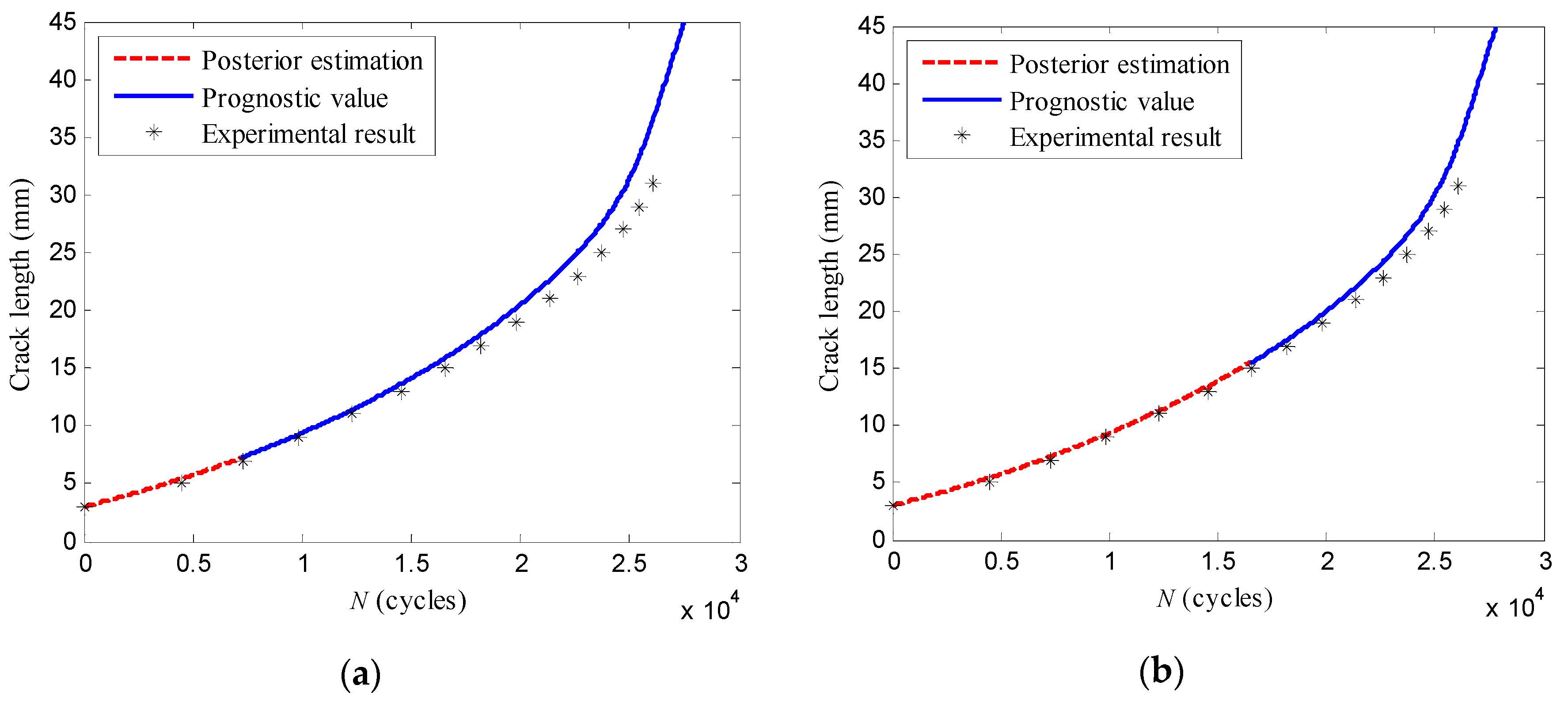
Aiming at realizing on-line fatigue crack propagation prognosis, a LW-PF-based method is proposed to combine the PZTs-based active Lamb wave method with the PF. The PZT sensor array is used to actuate and acquire Lamb wave signals in the structure. The cross-correlation damage index extracted from the monitored Lamb wave signal is employed to capture signal characteristics and quantify the actual crack length. Each time a new damage index is available, the PF utilizes this damage index to estimate the posterior probability density function (pdf) of the crack length with the crack propagation state space model. This state space model is derived from a stochastic Paris’s law and an active Lamb wave-based measurement equation, whose parameters and uncertainty are determined by data driven methods. On the basis of the obtained posterior pdf, the prognosis of the crack propagation is performed and the failure cycle is calculated afterwards. The proposed method is evaluated with the fatigue experiments of 6 hole-edge crack specimens, and the posterior estimation and prognostic value of the crack length are discussed, as well as the failure cycle.
The rest of the paper is organized as follows: in
Section 2, the proposed on-line LW-PF-based crack propagation prognosis method is explained. First, the state equation of the fatigue crack propagation is presented. Then, the PZTs-based active Lamb wave method is introduced. The modeling process of the measurement equation is proposed with the cross-correlation damage indices extracted from experimental Lamb wave signals. At the end, the LW-PF based prognosis method is presented in detail. In
Section 3, the proposed method is implemented and validated on 6 hole-edge crack specimens. Finally, the conclusions are given in
Section 4.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}