
Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons


Abstract
:
1. Introduction
- BLE RSS signals can have a higher sample rate than WiFi RSS signals (0.25 Hz~2 Hz)
- BLE consumes less power than WiFi
- BLE RSS signals can be obtained from most smart devices, while WiFi RSS signals cannot be provided by Apple portable devices and
- BLE beacons are usually battery powered, which are more flexible and easier deployed than WiFi.
- (1)
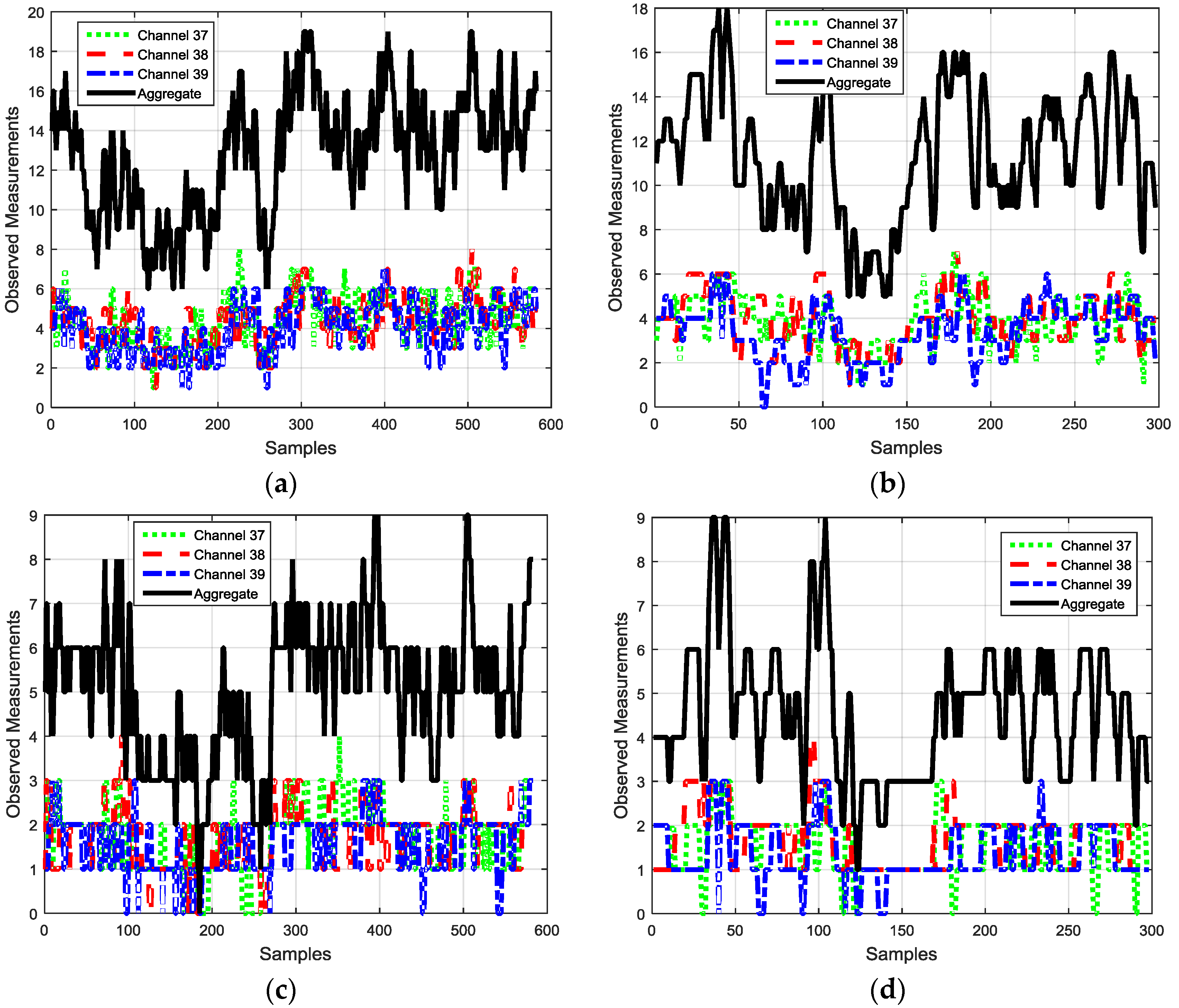
- We propose the usage of the separate PRM to improve both the location and distance estimation for each advertisement channel of BLE beacons. Moreover, we originally generate separate radio map database for each BLE advertisement channel for the FP process.
- (2)
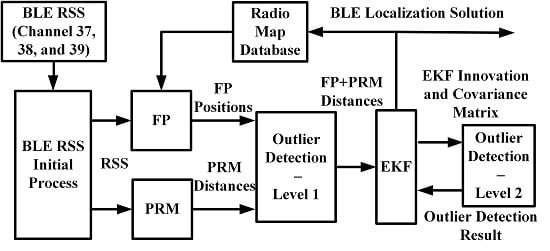
- We originally propose an algorithm for BLE-based indoor localization by combing separate PRM, separate FP, EKF and outlier detection.
- (3)
- We propose a two-level outlier detection algorithm to improve the robustness of the system.
- (1)
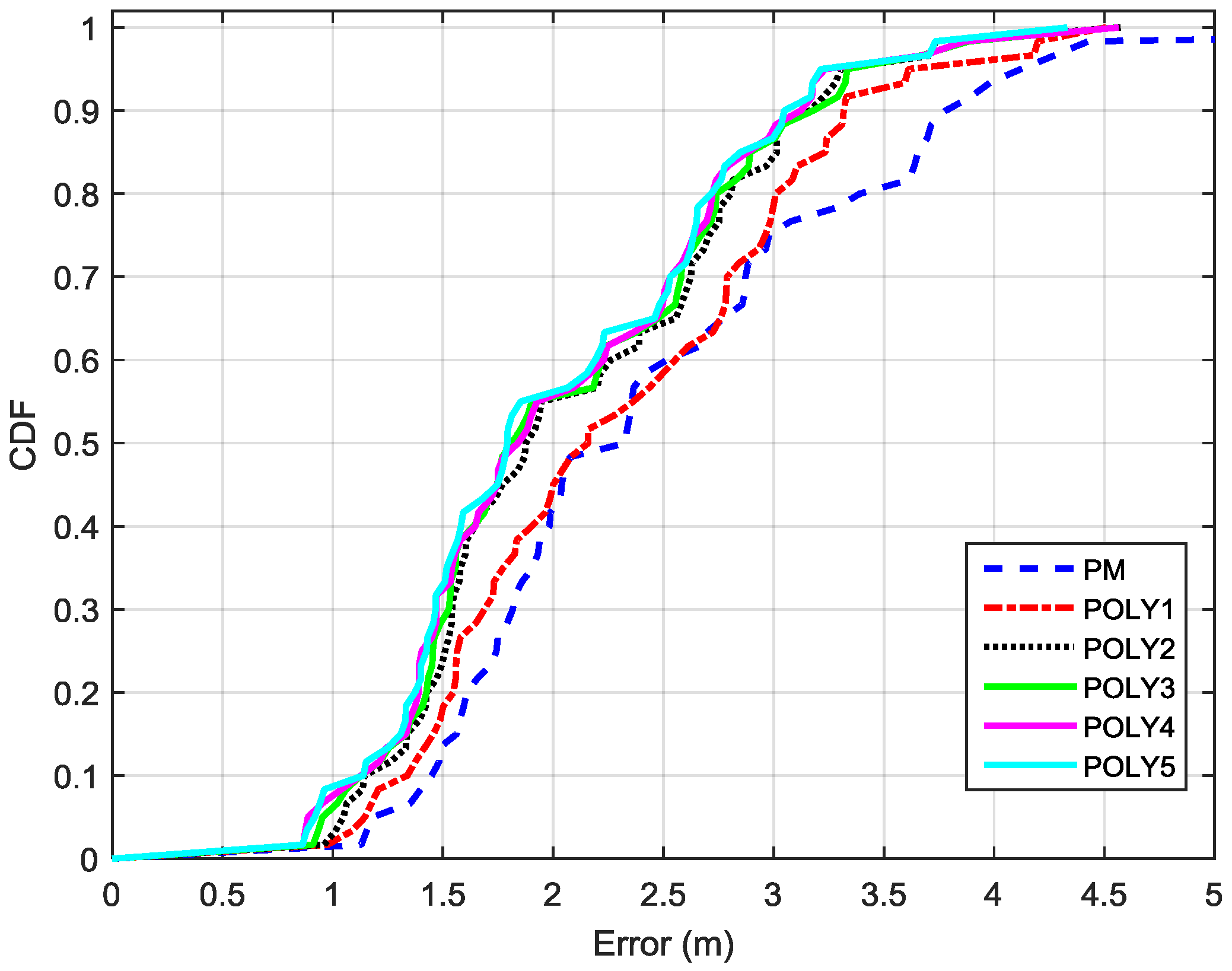
- Compared with results that use traditional PM, the distance estimation accuracy is improved by 18.42% using the PRM.
- (2)
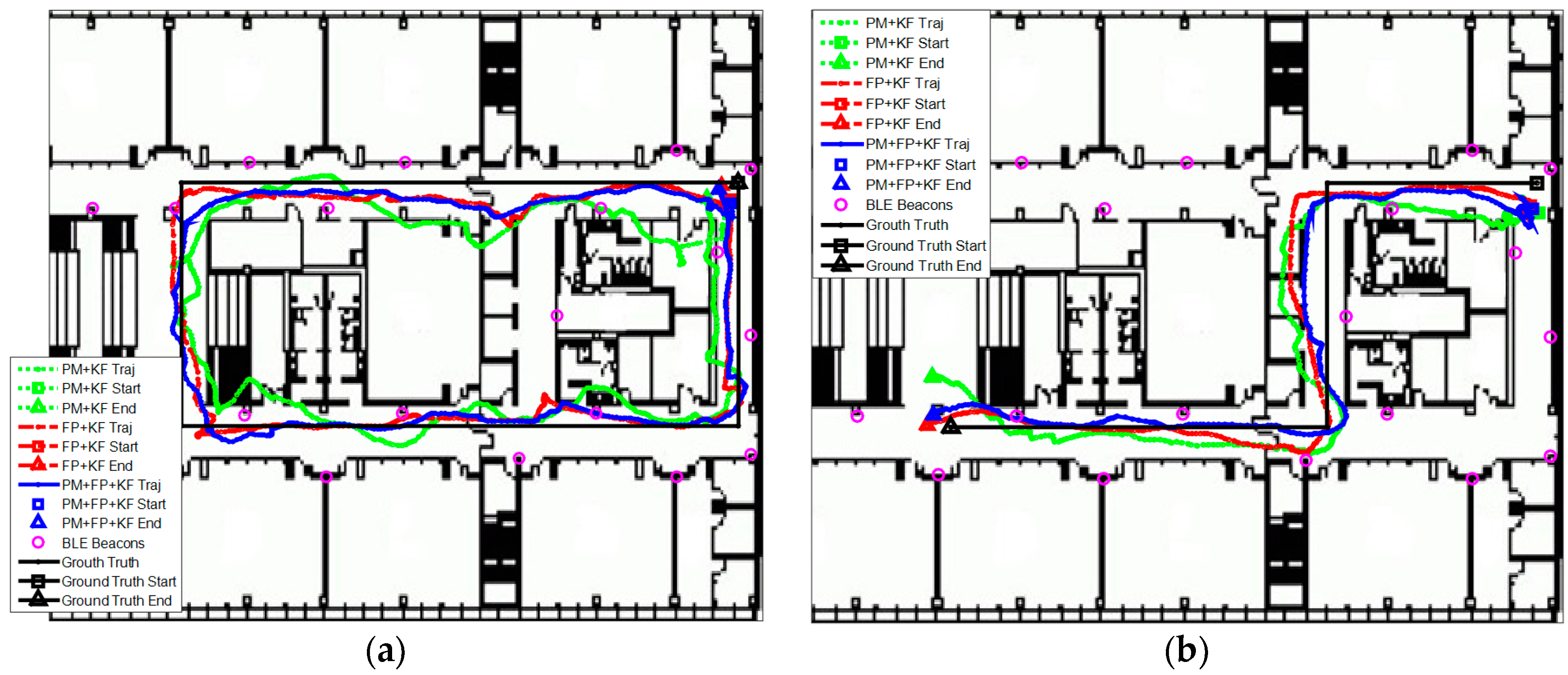
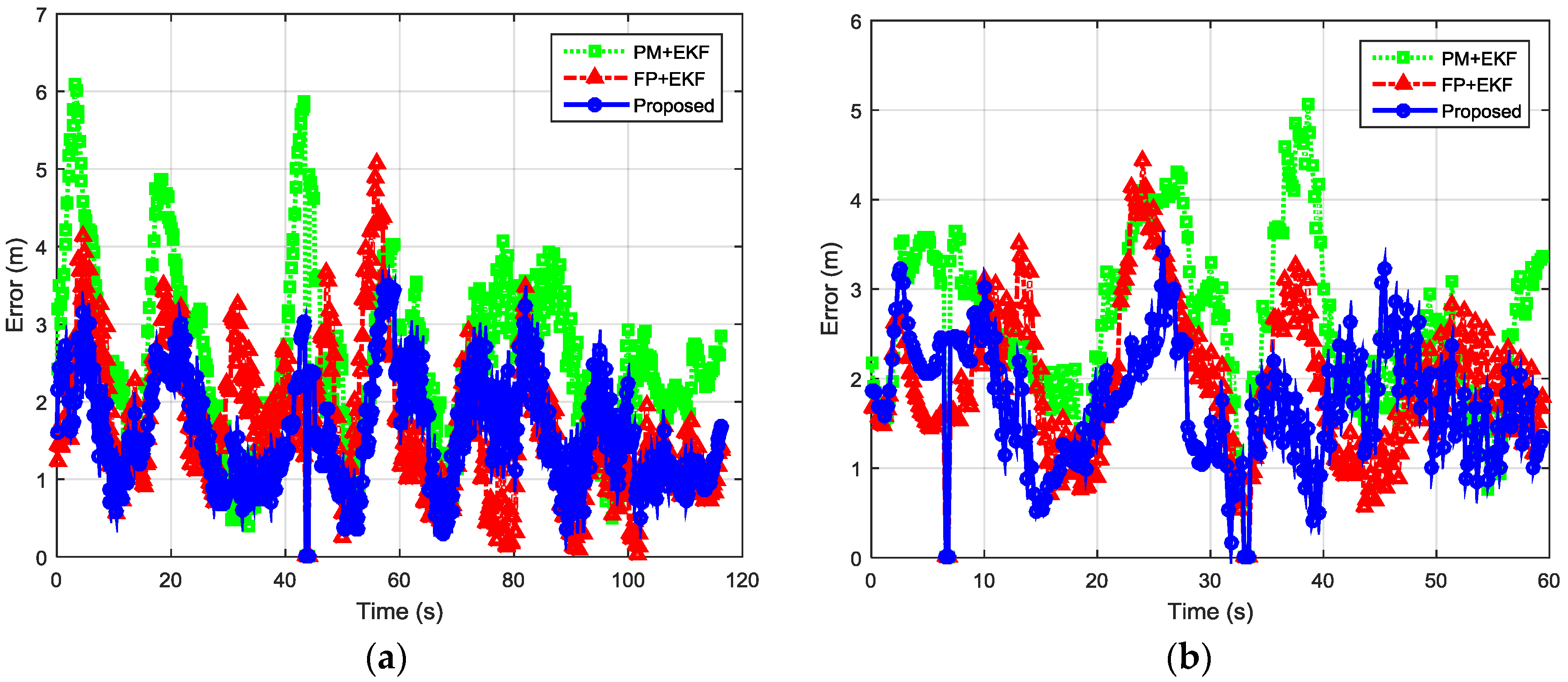
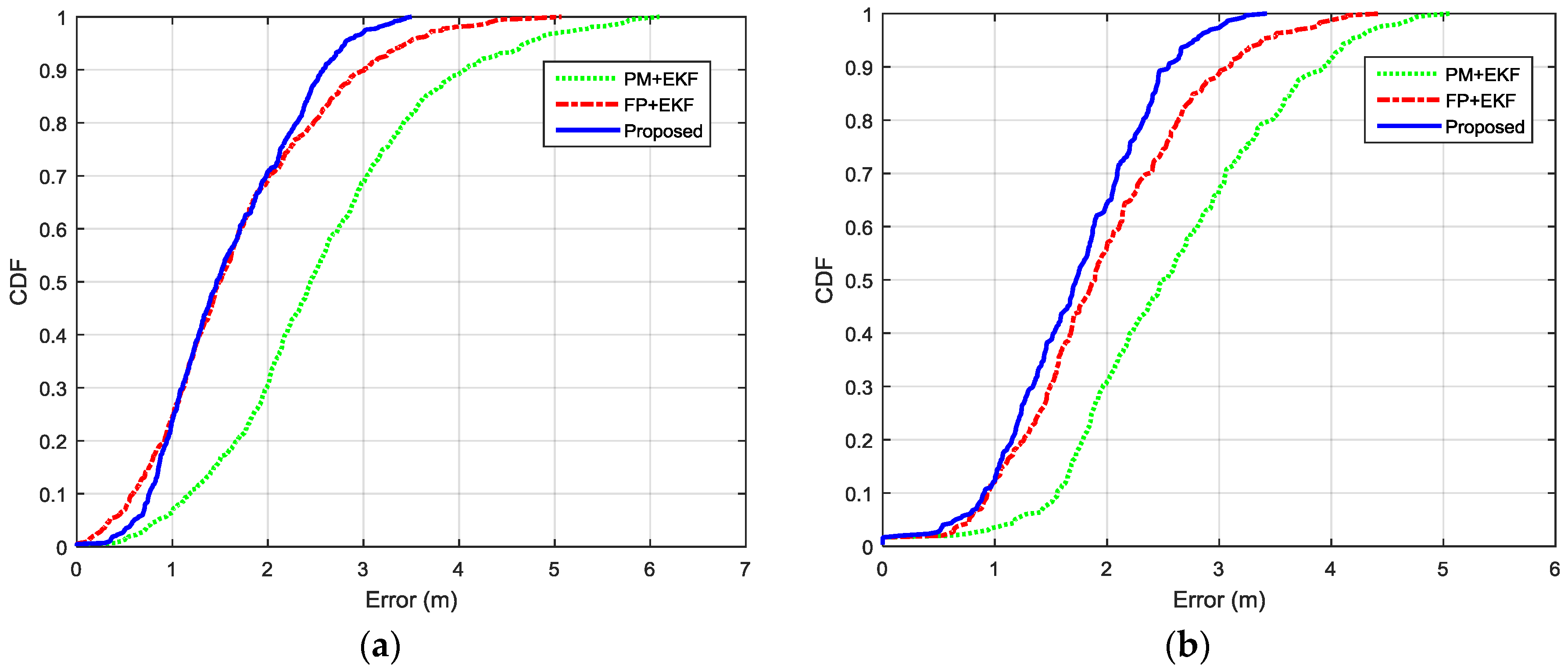
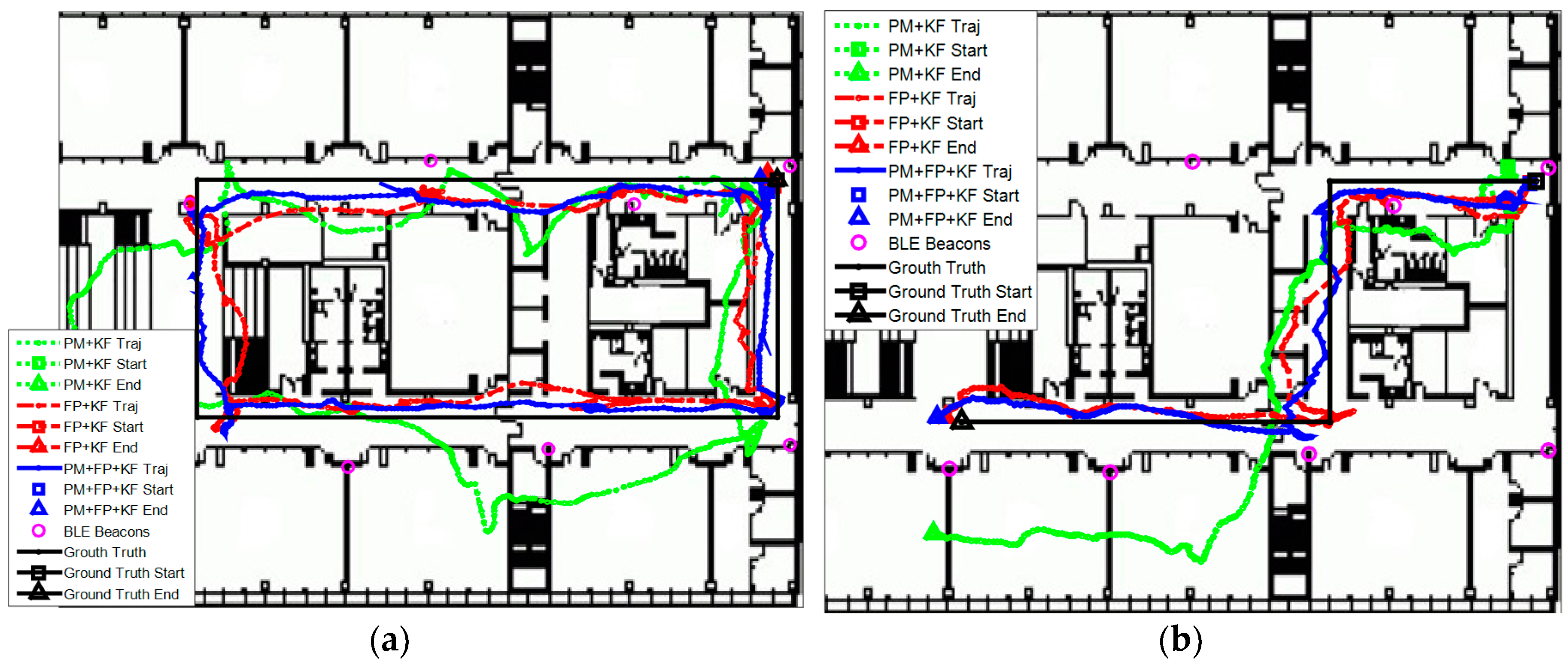
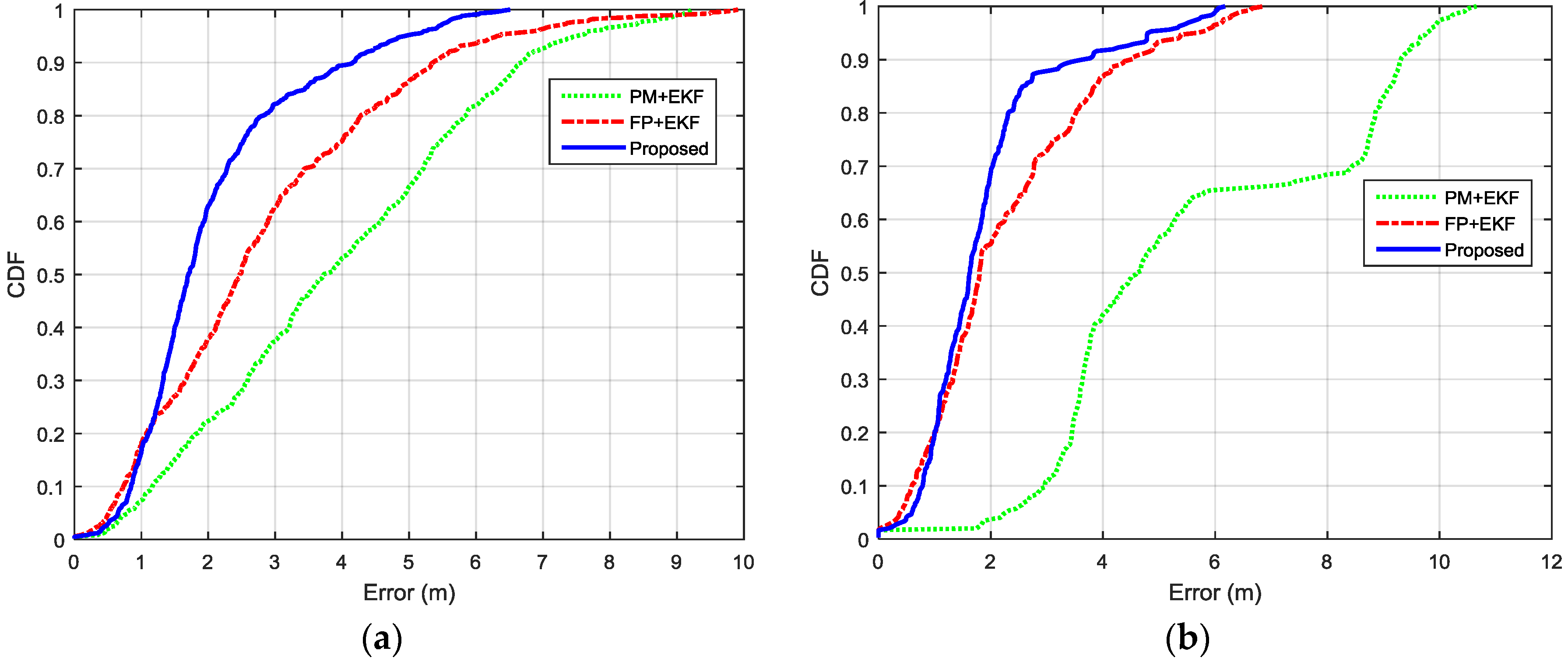
- In the case of dense deployment of BLE beacons, the proposed algorithm achieves average 35.82% and 15.77% improvement of the location accuracy in two trajectories, compared with classical PM + EKF and FP + EKF, respectively. The improvement changes to 49.58% and 21.41% in the sparse deployment.
2. Related Work
3. Algorithm Description
3.1. System Overview
3.2. Polynomial Regression Model
3.3. Fingerprinting
3.4. Outlier Detection—Level 1
3.5. Extended Kalman Filtering
3.6. Outlier Detection—Level 2
4. Field Experiments
4.1. Experimental Setup
4.2. Performance of Polynomial Regression Model for Distance Estimation
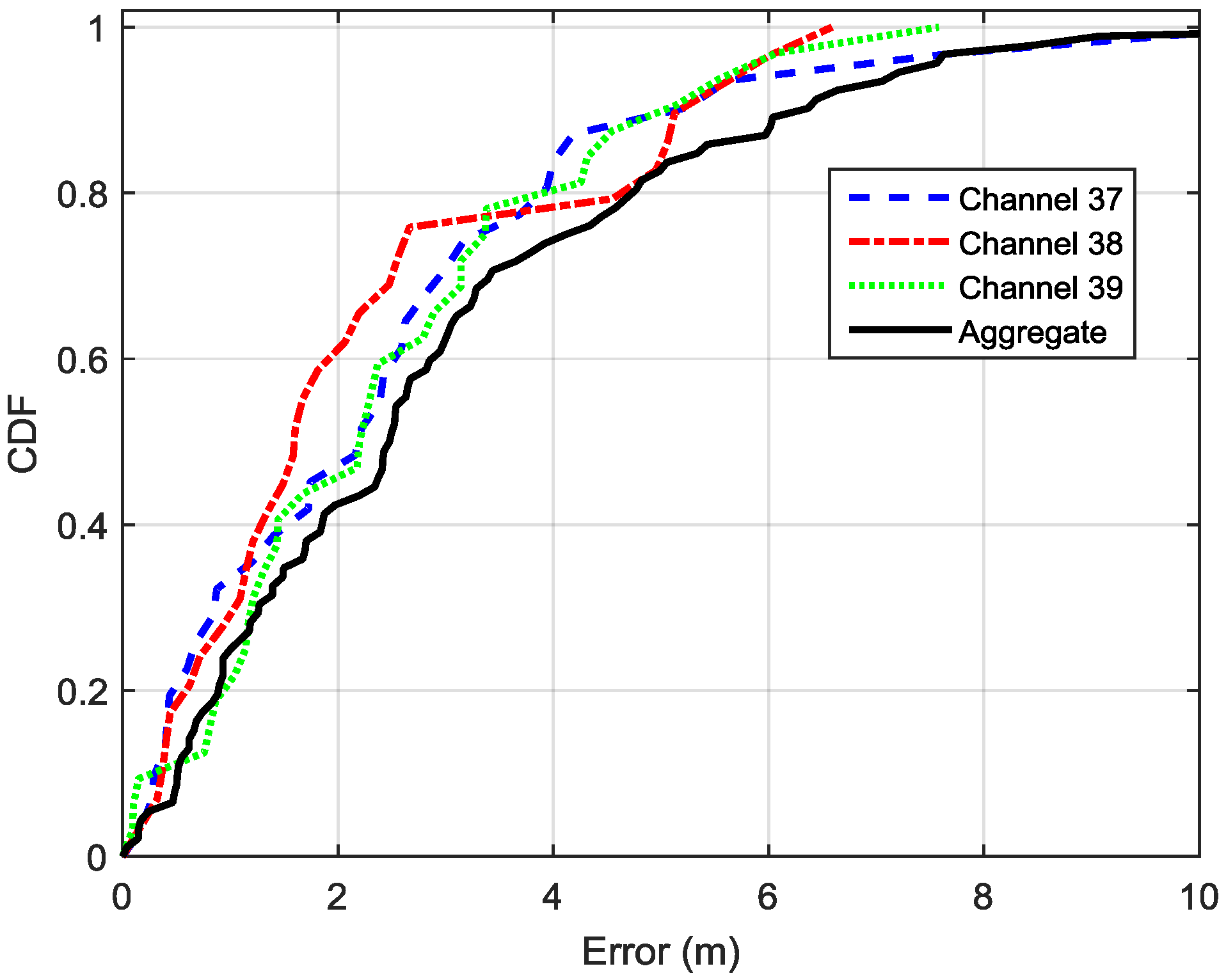
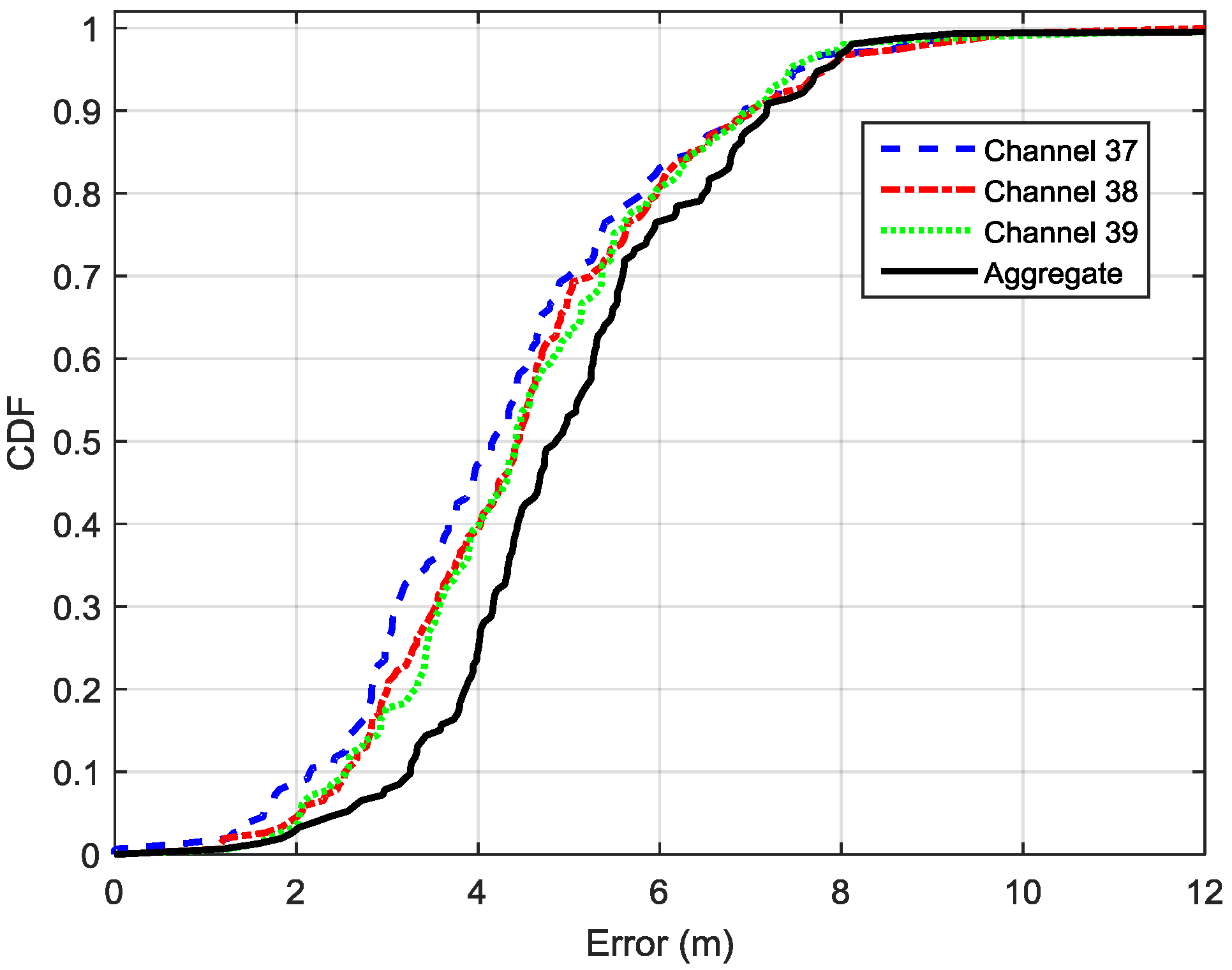
4.3. Performance of of Fingerprinting for Location Estimation
4.4. Performance Evaluation for the Proposed Algorithm
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhuang, Y.; Syed, Z.; Georgy, J.; El-Sheimy, N. Autonomous smartphone-based WiFi positioning system by using access points localization and crowdsourcing. Pervasive Mob. Comput. 2015, 18, 118–136. [Google Scholar] [CrossRef]
- Kim, S.J.; Kim, B.K. Dynamic ultrasonic hybrid localization system for indoor mobile robots. IEEE Trans. Ind. Electron. 2013, 60, 4562–4573. [Google Scholar] [CrossRef]
- De Angelis, A.; Dwivedi, S.; Handel, P. Characterization of a flexible UWB sensor for indoor localization. IEEE Trans. Instrum. Meas. 2013, 62, 905–913. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Zhuang, Y.; El-Sheimy, N. Tightly-coupled integration of WiFi and mems sensors on handheld devices for indoor pedestrian navigation. IEEE Sens. J. 2016, 16, 224–234. [Google Scholar] [CrossRef]
- Colombo, A.; Fontanelli, D.; Macii, D.; Palopoli, L. Flexible indoor localization and tracking based on a wearable platform and sensor data fusion. IEEE Trans. Instrum. Meas. 2014, 63, 864–876. [Google Scholar] [CrossRef]
- Li, Y.; Georgy, J.; Niu, X.; Li, Q.; El-Sheimy, N. Autonomous calibration of MEMS Gyros in consumer portable devices. IEEE Sens. J. 2015, 15, 4062–4072. [Google Scholar] [CrossRef]
- Dabove, P.; Ghinamo, G.; Lingua, A.M. Inertial sensors for smartphones navigation. SpringerPlus 2015, 4, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Piras, M.; Lingua, A.; Dabove, P.; Aicardi, I. Indoor navigation using smartphone technology: A future challenge or an actual possibility? In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1343–1352.
- Wang, J.; Hu, A.; Li, X.; Wang, Y. An improved PDR/magnetometer/floor map integration algorithm for ubiquitous positioning using the adaptive unscented kalman filter. ISPRS Int. J. Geo-Inf. 2015, 4, 2638–2659. [Google Scholar] [CrossRef]
- Lan, H.; Yu, C.; Zhuang, Y.; Li, Y.; El-Sheimy, N. A novel kalman filter with state constraint approach for the integration of multiple pedestrian navigation systems. Micromachines 2015, 6, 926–952. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Jongbae, K.; Heesung, J. Vision-based location positioning using augmented reality for indoor navigation. IEEE Trans. Consum. Electron. 2008, 54, 954–962. [Google Scholar]
- Dae Hee, W.; Eunsung, L.; Moonbeom, H.; Seung-Woo, L.; Jiyun, L.; Jeongrae, K.; Sangkyung, S.; Young Jae, L. Selective integration of GNSS, vision sensor, and INS using weighted DOP under GNSS-challenged environments. EEE Trans. Instrum. Meas. 2014, 63, 2288–2298. [Google Scholar]
- Ghinamo, G.; Corbi, C.; Lovisolo, P.; Lingua, A.; Aicardi, I.; Grasso, N. Accurate positioning and orientation estimation in urban environment based on 3D models. In Proceedings of the New Trends in Image Analysis and Processing—ICIAP 2015 Workshops, Genoa, Italy, 7–8 September 2015; Springer: New York, NY, USA; pp. 185–192.
- Aicardi, I.; Dabove, P.; Lingua, A.; Piras, M. Sensors integration for smartphone navigation: Performances and future challenges. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2014, 40, 9–16. [Google Scholar] [CrossRef]
- Ghinamo, G.; Corbi, C.; Francini, G.; Lepsoy, S.; Lovisolo, P.; Lingua, A.; Aicardi, I. The MPEG7 visual search solution for image recognition based positioning using 3D models. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 8–12.
- Zhuang, Y.; Shen, Z.; Syed, Z.; Georgy, J.; Syed, H.; El-Sheimy, N. Autonomous wlan heading and position for smartphones. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium, PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1113–1121.
- Li, Y.; Zhuang, Y.; Lan, H.; Zhou, Q.; Niu, X.; El-Sheimy, N. A hybrid WiFi/magnetic matching/PDR approach for indoor navigation with smartphone sensors. IEEE Commun. Lett. 2016, 20, 169–172. [Google Scholar] [CrossRef]
- Hui, L.; Darabi, H.; Banerjee, P.; Jing, L. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar]
- Lohan, E.S.; Talvitie, J.; Figueiredo e Silva, P.; Nurminen, H.; Ali-Loytty, S.; Piche, R. Received signal strength models for wlan and ble-based indoor positioning in multi-floor buildings. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6.
- Feng, Y.; Yuxin, Z.; Gunnarsson, F. Proximity report triggering threshold optimization for network-based indoor positioning. In Proceedings of the 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 1061–1069.
- Zhao, Y.; Feng, Y.; Gunnarsson, F.; Amirijoo, M.; Ozkan, E.; Gustafsson, F. Particle filtering for positioning based on proximity reports. In Proceedings of the 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 1046–1052.
- Thaljaoui, A.; Val, T.; Nasri, N.; Brulin, D. BLE localization using RSSI measurements and iRingLA. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 2178–2183.
- Palumbo, F.; Barsocchi, P.; Chessa, S.; Augusto, J.C. A stigmergic approach to indoor localization using bluetooth low energy beacons. In Proceedings of the 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015; pp. 1–6.
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against WifI? A comparison of indoor location performance. In Proceedings of the 20th European Wireless Conference on European Wireless, Barcelona, Spain, 14–16 May 2014; pp. 1–6.
- Zhang, L.; Liu, X.; Song, J.; Gurrin, C.; Zhu, Z. A comprehensive study of bluetooth fingerprinting-based algorithms for localization. In Proceedings of the 27th International Conference on Advanced Information Networking and Applications Workshops, Barcelona, Spain, 25–28 March 2013; pp. 300–305.
- Pei, L.; Chen, R.; Liu, J.; Kuusniemi, H.; Tenhunen, T.; Chen, Y. Using inquiry-based bluetooth RSSI probability distributions for indoor positioning. J. Glob. Position. Syst. 2010, 9, 122–130. [Google Scholar]
- Cabarkapa, D.; Gruji, I.; Pavlovi, P. Comparative analysis of the bluetooth low-energy indoor positioning systems. In Proceedings of the 12th International Conference on Telecommunication in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 14–17 October 2015; pp. 76–79.
- Wang, B.; Zhou, S.; Liu, W.; Mo, Y. Indoor localization based on curve fitting and location search using received signal strength. IEEE Trans. Ind. Electron. 2015, 62, 572–582. [Google Scholar] [CrossRef]
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.M.; Fernandez, P.; Lago, F.A.; Garcia, E.; Blas, J.; Abril, E.J. Robust indoor positioning provided by real-time RSSI values in unmodified wlan networks. IEEE J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Kuang, S. Geodetic Network Analysis and optimal Design: Concepts and Applications; Ann Arbor PressInc.: Chelsea, MI, USA, 1996. [Google Scholar]
- Teunissen, P.J.G. Quality control in integrated navigation systems. In Proceedings of the IEEE PLANS ’90, Position Location and Navigation Symposium Record. The 1990’s—A Decade of Excellence in the Navigation Sciences, Las Vegas, NV, USA, 20–23 March 1990; pp. 158–165.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory | Algorithm | 50% | 90% | Mean | RMS |
|---|---|---|---|---|---|
| I | PM + EKF | 2.44 | 4.06 | 2.57 | 2.81 |
| FP + EKF | 1.48 | 3.00 | 1.67 | 1.91 | |
| Proposed | 1.46 | 2.57 | 1.59 | 1.74 | |
| II | PM + EKF | 2.49 | 3.92 | 2.59 | 2.76 |
| FP + EKF | 1.89 | 3.08 | 1.96 | 2.12 | |
| Proposed | 1.72 | 2.55 | 1.72 | 1.84 |
| Trajectory | Algorithm | 50% | 90% | Mean | RMS |
|---|---|---|---|---|---|
| I | PM + EKF | 3.72 | 6.68 | 3.93 | 4.46 |
| FP + EKF | 2.47 | 5.35 | 2.83 | 3.40 | |
| Proposed | 1.70 | 4.16 | 2.07 | 2.44 | |
| II | PM + EKF | 4.60 | 9.31 | 5.59 | 6.20 |
| FP + EKF | 1.80 | 4.52 | 2.27 | 2.75 | |
| Proposed | 1.63 | 3.59 | 1.89 | 2.27 |
| Trajectory | Algorithm | 50% | 90% | Mean | RMS |
|---|---|---|---|---|---|
| I | Dense Distribution | 1.46 | 2.57 | 1.59 | 1.74 |
| Sparse Distribution | 1.70 | 4.16 | 2.07 | 2.44 | |
| II | Desnse Distribution | 1.72 | 2.55 | 1.72 | 1.84 |
| Sparse Distribution | 1.63 | 3.59 | 1.89 | 2.27 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. https://doi.org/10.3390/s16050596
Zhuang Y, Yang J, Li Y, Qi L, El-Sheimy N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors. 2016; 16(5):596. https://doi.org/10.3390/s16050596
Chicago/Turabian StyleZhuang, Yuan, Jun Yang, You Li, Longning Qi, and Naser El-Sheimy. 2016. "Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons" Sensors 16, no. 5: 596. https://doi.org/10.3390/s16050596
APA StyleZhuang, Y., Yang, J., Li, Y., Qi, L., & El-Sheimy, N. (2016). Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors, 16(5), 596. https://doi.org/10.3390/s16050596