1. Introduction
The fundamental goal of BSS is to recover the original signals from their mixtures when the mixing process is unknown. Since first considered in the biological problem of motion decoding in vertebrates by Jutten, Ans and Roll [
1], the BSS problem has been expanded in many multi-sensor systems: Antenna arrays in electromagnetism or acoustics, chemical sensor arrays, electrode arrays in electroencephalography,
etc. This very wide set of possible applications is probably one reason for its success [
1,
2]. Independent Component Analysis (ICA) is one of the most widely used BSS techniques for revealing hidden factors that underlie sets of random variables, measurements, or signals. The ICA of a random vector consists of searching for a linear transformation that minimizes the statistical dependence between its components [
3,
4]. The power of ICA resides in the physical assumptions that different physical processes generate unrelated signals. The simple and generic nature of this assumption allows ICA to be successfully applied in a diverse range of research fields [
5]. For the last three decades, ICA has received attention from varied domains, including the biomedical applications [
6,
7,
8,
9,
10,
11,
12,
13] such as the single-channel electromyogram (EMG) classification with ensemble-empirical-mode-decomposition-based ICA for diagnosing neuromuscular disorders in [
6], the identification of simple and complex finger flexion movements using surface electromyography (sEMG) and muscle activation strategy with Subband Decomposition ICA (SDICA) in [
7] and the driver fatigue classification with ICA by Entropy Rate Bound Minimization (ICA-ERBM) in an electroencephalography (EEG)-based system in [
8]; the audio source separation like the noisy speech recognition [
14], the multichannel blind deconvolution and speech separation [
15]; the cooperative or non-cooperative communication like the semi-blind signal extraction with possible constrains [
16], the blind adaptive detection in systems like Direct Sequence Code Division Multiple Access (DS-CDMA) [
17]; other applications also include those in chemical sensor arrays [
18], the target decomposition (TD) in image processing [
19] and the estimation of modal parameters in vibration systems [
20].
There has been numerous algorithms that belong to the ICA scheme. Most representative ones are: (1) the FastICA algorithm by Hyvärinen and Oja [
5,
21,
22], which is a fixed point algorithm that employs higher order statistics for the recovery of independent sources. FastICA uses simple estimates of negentropy based on the maximum entropy principle, which requires the use of appropriate nonlinearities for the learning rule of the neural network; (2) the Equivariant Adaptive Separation via Independence (EASI) algorithm by Cardoso and Laheld [
23] that is a class of adaptive algorithms for source separation implementing an adaptive version of equivariant estimation. The EASI algorithms are based on the idea of serial updating; (3) the Infomax algorithm by Bell and Sejnowski [
24], which belongs to a self-organizing learning algorithm maximizing the information transferred in a network of non-linear units, and is also regarded as a higher-order generalization of the principal component analysis (PCA); (4) The Joint Approximate Diagonalization of Eigenmatrices (JADE) algorithm by Cardoso and Souloumiac [
25,
26] consisting of high-order measures of independence and the class of Jacobi algorithms for their optimization. In the JADE algorithm, joint diagonalization of cumulant matrices allows the whole high-order cumulant set to be processed with computational efficiency similar to eigen-based techniques.
Because of its extensive applications and attractive properties, the performance of ICA algorithms has also been studied by many researchers. Some early works mainly centered on the fundamental problem of separability, meaning whether there is the possibility for the mixtures to be separated. Several criteria have been put forth based on the matrix theory or the structure characterization theory of random variables [
27,
28,
29]. For instance, the concept of the
m-row decomposability is introduced in [
27] and it is proved therein that if the mixing matrix is
m-row decomposable, then in principle it is possible to separate the source signals into
m groups. In [
28], the authors proved that the signals can be decoupled, or separated, using only the condition that they are statistically independent, and found even weaker sufficient conditions involving their cross-polyspectra. The results of these works are significant, but they lack further discussion on the separation quality when decoupling is possible, which is crucial and of great concern for the applications. The work had been carried on by several researchers. In [
30], Cardoso studied the most common class of orthogonal invariant algorithms for the blind separation of independent sources in terms of performance, quantified by the rejection rate, and a pairwise lower bound on the performance was given. Comon analyzed the theoretical asymptotic performance of a contrast-based BSS scheme in [
31]. Finally, in [
32], the Cramér-Rao lower bounds for linear ICA as an algorithm independent theoretical limit of the achievable separation quality was deduced. Limitations and performance bounds of certain ICA algorithms have been indicated in these works, but little attention has been paid to the actual performance under different situations depicted by the mixing processes, the sources as well as the environment, while the issue is actually significant for the applications. Analysis of the performance of several ICA algorithms under varied conditions was referred to in the scenario of blind suppression of interfering signals in direct sequence spread spectrum communication systems [
33], but the work was mainly based on computer simulations with little in the way of analytical expression and conclusions.
Generally speaking, we think it is of great significance to analyze the performance of ICA algorithms under varied conditions depicted by the mixing matrix, the sources as well as the environment, since conclusions (especially quantitative ones) from such analysis may act as guidance for the applications of wide variety. For instance, it should be helpful to learn how to design the receiving array so as to expect better separation performance and more robustness against intricate situations? Why the algorithm works well for some mixtures while being unsatisfactory for the others? Under what kind of scenarios would the ICA algorithms fail? and further, what measures can be taken when faced with such failure? Answers to such questions are interesting and of great importance. However, little attention has been paid to the issue in the current literature, especially analytical form works.
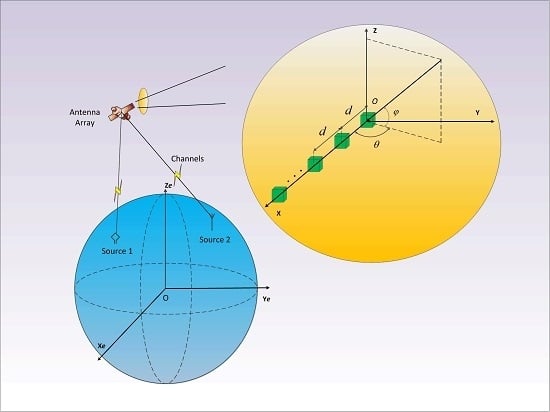
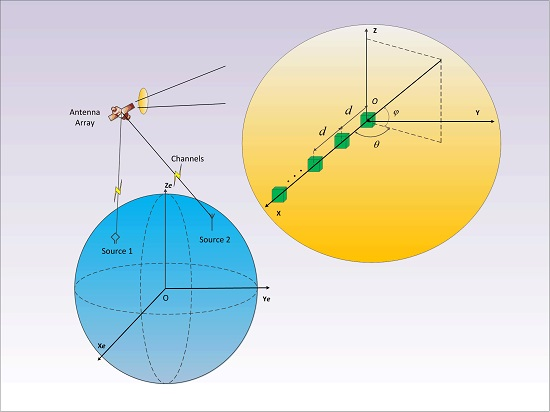
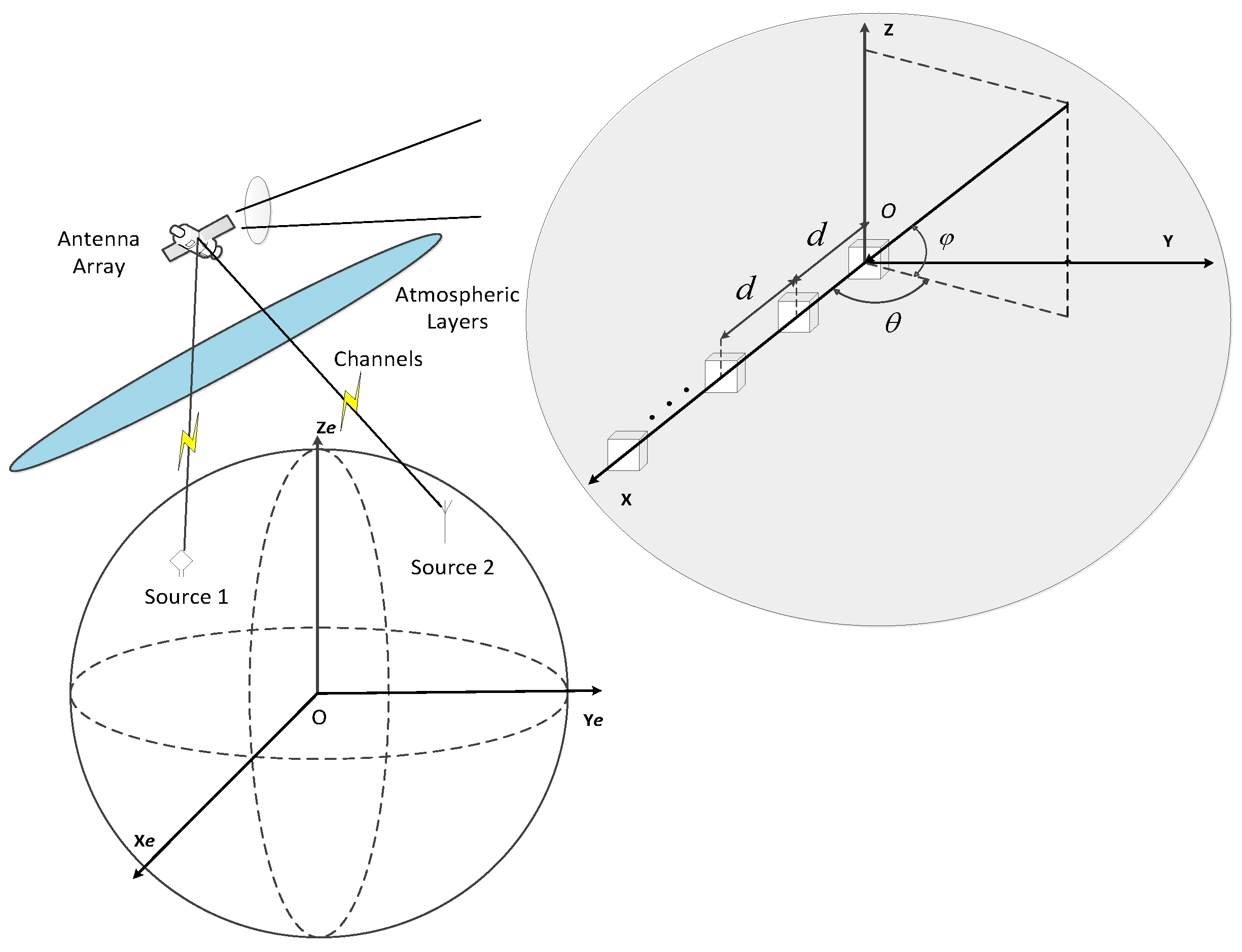
In this manuscript, the typical scenario of antenna array receiving is taken as an illustration for the varied applications involving sensor arrays. The problem of concern is the performance of ICA algorithms under varied situations depicted by the mixing matrix, the sources and the environment noise. The influence of several fundamental factors in practice has been analyzed with quantitative results; factors concerned include the environment noise level, the element spacing of the array, the frequencies of the sources as well as their locations. The analytic connection between the noise variance, the source variance, the condition number of the mixing matrix and the optimal signal to interference-plus-noise ratio is given. Also, the question how the mixing matrix is affected by the element spacing of the array, the frequencies and locations of the radiators is considered, with special concern on the prevention of (nearly) singular mixing matrices. What is more, an effective countermeasure against the situations of singular mixtures has been proposed, on the basis of previous analysis. The manuscript is arranged as follows. Models of the noisy ICA and the sensor array output as well as the definition of the condition number are introduced in
Section 2. Analytical works are mainly implemented in
Section 3. In
Section 4, simulation works are carried out to demonstrate the validity of previous results and conclusions. Summaries and conclusions are stated in
Section 5.
3. Performance of ICA vs. Practical Factors
3.1. Environment Noise and the Condition Number
Since restitution of sources via typical ICA algorithms equals solving the linear equation set in nature, it has been well-known that the performance of ICA estimators in the noisy case depends on the condition number of the mixing matrix and the environment noise level. More specifically, it should be intuitively understood that the ICA algorithms would be more sensitive to the noise item when the singularity of the mixing matrix is stronger. Here, we attempt to push the work further via figuring out the upper bound of the ICA separation performance, under certain noise level and the condition number.
The concept of the optimal separator that BSS methods aim at implementing asymptotically is introduced in [
35], which indicates the upper limit of the separation performance for all ICA algorithms. In [
35], the separation performance is measured by the criterion signal to interference-plus-noise ratio (SINR), and the SINR of source
k at output
i of separator
B is defined therein as:
where
bi is the
i-th row of
B,
(
stands for mathematical expectation),
is the
k-th equivalent source in Equation (5),
ak is the steering vector of source
k,
Rk is the total noise correlation matrix temporal mean for the source
k, defined by
,
is the auto-correlation of the observation, and the superscript “
H” indicates conjugate transpose.
The restitution quality of the source
k by the separator
B can be evaluated by the quantity SINRM
k, which is the maximum value of SINR
k(
bi) among all 1 ≤
i ≤
N. It has been verified in [
35] that under this criterion,
B and
BΛΠ have the same performance, in which
Λ is a diagonal matrix and
Π is a permutation matrix. This indicates that the criterion itself is not susceptible to the intrinsic scale-permutation ambiguity of the ICA.
For the case of two sources, the SINRM
1 at the output of the optimal separator is given by:
where
denotes the signal-to-noise ratio (SNR) at the input of the separator for source
k,
Rv is the auto-correlation of the noise item.
α12 is the spatial correlation coefficient between sources 1 and 2 in the matrix of
, defined by:
One thing to be noticed is that when the noise on the sensors are additive white Gaussian (as presumed in this paper), we have
(where
I is the unit matrix) and thus
. With Equation (8), the expression can be further simplified as:
and Equation (16) may be transformed as:
Combining Equations (8) and (18), we have:
With Equations (13), (15) and (19), there is:
and when source 2 is strong enough (
), Equation (20) can be simplified with approximation as:
Similar expression can be obtained for SINRM2.
Equations (20) and (21) indicate that the superior limit of the separation performance via ICA algorithms is mainly determined by the SNR at the input of the separator and the condition number of the mixing matrix. Generally speaking, the performance of the algorithms would be more susceptible to the noise with larger condition number of the mixing matrix.
According to Equation (13), cond(A) ≥ 2, and the condition number reaches its minimum, which indicates the weakest singularity of the mixing process, it is straightforward that and . Then according to Equation (15), the SINRM1 reaches its maximum and equals ε1 regardless of ε2, which indicates that the SINR at the output equals the SNR at the input of the separator. Since this is theoretically the best result possible, cond(A) = 2 should be the ideal case that is desired in practice.
On the contrary, the case that should be avoided is the singular mixtures, meaning the situation where cond(A) = ∞. This is because then the multi-channel ICA problem would degenerate into a single-channel one, which the traditional ICA algorithms cannot handle, and thus, the separation may come to a critical failure in applications.
3.2. Condition Number vs. Practical Factors
It can be seen from Equation (17) that under the white Gaussian noise assumption, the SNR at the input of the separator is only determined by the variances of the sources and the noise. That is to say, factors including the element spacing of the array, the frequencies and locations of the NB sources would not affect the signal-to-noise ratio, thus these factors may impact the separation performance via changing the condition number only. In this part, we attempt to analyze their relationships with the condition number in the analytical form and aim at reaching instructive conclusions. Moreover, special attention is paid to the case of singular mixtures.
Without the loss of generality, suppose that in Equation (13) d =
βλ1,
λ1 ≤
λ2 and
λ2 =
Dλ1. The parameter
β represents the element spacing in a relative sense,
D describes the divergence of wavelengths of the sources and the influence of the locations of sources will be depicted by the DOAs. With notations above, Equation (13) can be rearranged as:
3.2.1. Element Spacing of the Array
From Equation (22), it is obvious that for fixed
D and DOAs, the condition number varies with
β in a periodical way, with the period being:
The periodicity indicates that, increasing the element spacing of the array may have different impacts under varied situations depicted by D and DOAs.
Taking the partial derivative of Equation (23) against
D, we have:
where
is the sign function. Hence, if
cosθ2cosϕ2 >
cosθ1cosϕ1, then the period increases along with the value of
D within the interval
; and decreases along with it once
D is greater than
. If
cosθ2cosϕ2 <
cosθ1cosϕ1, the period decreases along with the value of
D.
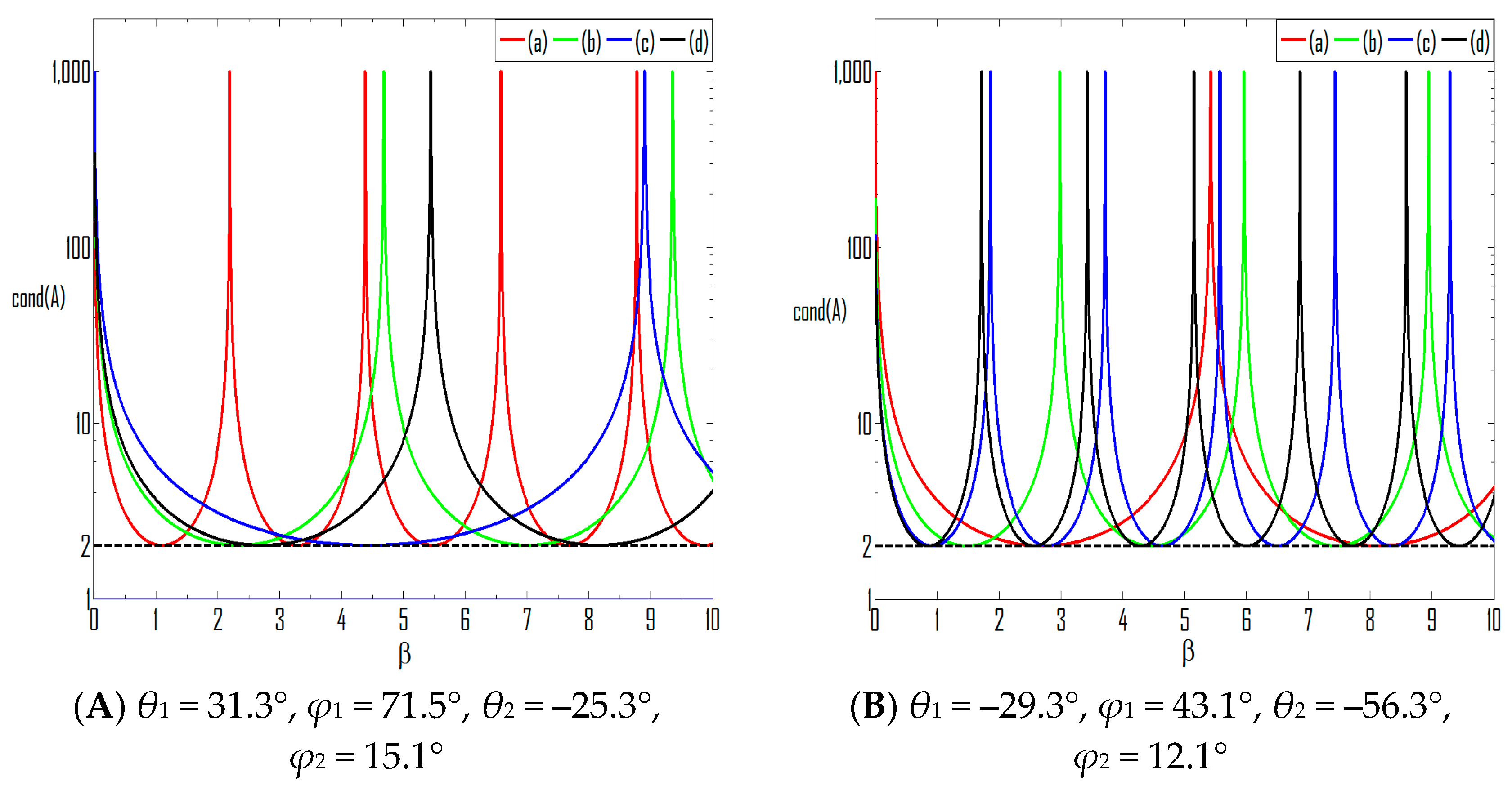
The influence of the element spacing on the condition number is depicted by
Figure 3.
The periodicity has been clearly demonstrated, with the period determined by varied
D and DOAs. In
Figure 3A,
θ1 = 31.3°,
ϕ1 = 71.5°,
θ2 = −25.3°,
ϕ2 = 15.1°, thus
. We can see that for (a) and (b), where
, the period is lengthened with greater
D ; while for (c) and (d), where
, the period is shortened with increasing
D. In
Figure 3B,
θ1 = −29.3°,
ϕ1 = 43.1°,
θ2 = −56.3°,
ϕ2 = 12.1°, and
. We can see that the value of
keeps decreasing with greater element spacing.
The minimal and maximal values of the condition number also arise periodically, and they appear respectively at
βmin and
βmax that equal:
According to previous analysis, the maximal values of the condition number which correspond to the singular mixtures should be avoided in applications, in order to prevent the critical failure of separation. In practice, the expected circumstance is that: with well-designed sensor arrays, the separation via ICA algorithms is satisfactory and can handle with mixtures consisted of sources with diverse carriers (within the band that the array is designed for) and from all possible locations. This is meaningful considering the intricate and unforeseen situations in applications. And here, we attempt to achieve this via designing properly the element spacing of the array.
One straightforward idea is that if the actual
β is smaller than all possible
βmax, then the singular case would not occur. While
D and DOAs are fixed, this indicates that:
Extending the relationship for all
D ≥ 1 and
θi ∈[−90°, 90°];
yields:
Since |
cosθ2cosϕ2–
Dcosθ1cosϕ1| ∈ (0,
D).
This indicates that so long as the element spacing of the array is smaller than wavelengths of the sources, the cases of singular mixtures can be well prevented for sources with diverse carriers and from all possible directions. The only exception happens when cos
θ2cos
ϕ2 −
Dcos
θ1cos
ϕ1 = 0, then the mixture would be singular regardless of
β. The conclusion can act as a meaningful guidance while designing the sensor array for applications adopting blind source separation. More specifically, if the array is designed for the frequency band (
fL~
fH), this means that the element spacing should satisfy
d <
c/
fH. For instance, consider the satellite communication on the C band (4~8 GHz), then the element spacing should be designed below 37.5 mm for the sake of avoiding failures of separation. Moreover, if in the specific application, the DOAs of the sources can be further confined, say
θ1ϕ1 ∈ [–
Ang°,
Ang°] (
Ang ≤ 90), then Equation (27) can be relaxed to:
Notice that in many of previous works concerning independent component analysis via multi-sensor arrays, the element spacing is usually presumed as half of the wavelength of the sources, in both theoretical analysis and simulations (for instance, in [
16,
35]). However, the presumption may be invalid for actual scenarios. Because first, the accurate prior information of the wavelength cannot be obtained in most applications requiring ICA; second, since there may be radiators working on different carriers, the equality is impossible to be maintained. Hence, conclusions here provide a more practical instruction for the selection of the element spacing, and the traditional settlement can be regarded as one of its special case with
β = 0.5.
3.2.2. Carrier Frequencies of the NB Sources
From Equation (22), it can be deduced that the condition number varies with the reciprocal of
D in a periodical way. The period is determined by
β and DOAs as:
Take the partial derivative of Equation (29) against
β, we have:
Thus, the period decreases along with the increase of β.
Values of (1/
D) correspond to minima (denoted as ((1/
D)
min)) and maxima (denoted as (1/
D)
max))) of the condition number that can be obtained as:
Since (1/
D) ∈ (0, 1], the number of possible minimum and maximal points are determined by
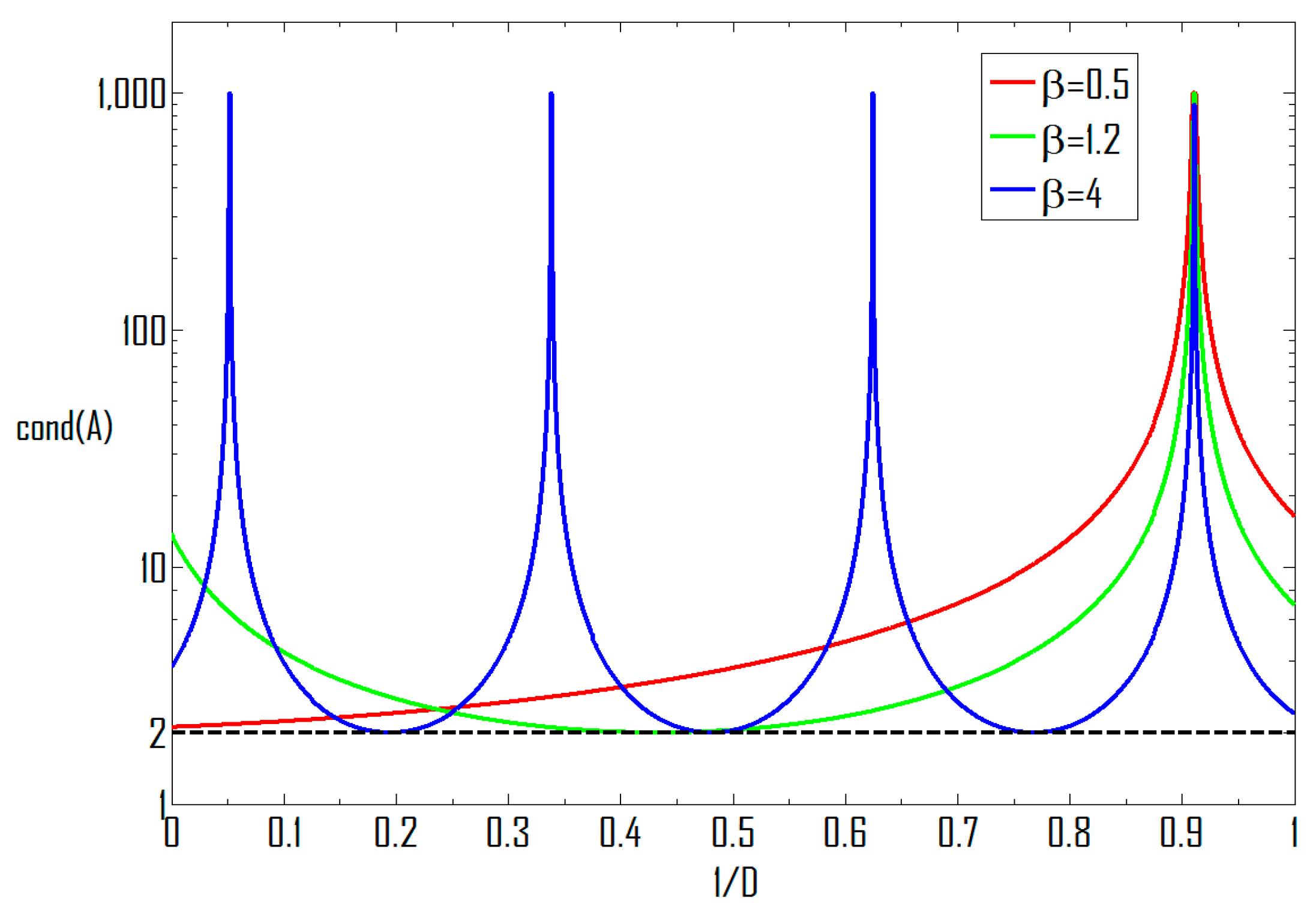
β and DOAs as well. The way the condition number varies with (1/
D) is demonstrated in
Figure 4. It can be seen that the value of ∆(1/
D) decreases with greater
β and since
θ1 = 31.3°,
ϕ1 = 21.5°,
θ2 = −25.3°,
ϕ2 = 15.1°, here, we can see that for
β = 4, the possible (1/
D)
min) and (1/
D)
max) are 0.1948, 0.4812, 0.7676 and 0.0516, 0.3380, 0.6244, 0.9108, respectively, and since
cosθ2cosϕ2 >
cosθ1cosϕ1, a maximal point appears at
D = (
cosθ2cosϕ2/
cosθ1cosϕ1) regardless of
β. This is consistent with the conclusion obtained in
Section 3.2.1.
Though Equation (31) indicates values of (1/
D) correspond to the maxima of the condition number, it should be noticed that a maximal point is valid only when it is within the interval of (0, 1]. This means that
m which relates to a valid (1/
D)
max should satisfy:
If β > 1, it should be obvious that there must exist m∈[⌈–βcosθ1cosϕ1⌉ + 1, ⌊βcosθ2cosϕ2 – βcosθ1cosϕ1⌋] for certain groups of (θi,ϕi) (i = 1,2), that would validate Equation (32). If β = 1, then the valid m would be 1 for cosθ1cosϕ1 = 0, or 0 for cosθ1cosϕ1≠ 0. If 0 < β < 1, then for cosθ1cosϕ1 = 0, there would not be m ∈ Z satisfying Equation (32); for cosθ1cosϕ1 ≠ 0, the only valid m would be 0, with (1/D)max = cosθ1cosϕ1/cosθ2cosϕ2. Notice that this is consistent with the analysis on the element spacing, where it has been stated that if β < 1, the cases of singular mixtures would not occur for all D ≥ 1 and θi ∈ [–90°, 90°], ϕi∈[–90°, 90°], with the only exception of cosθ2cosϕ2 − Dcosθ1cosϕ1.
From Equation (31), it could also be found that the minimum of (1/
D)
max (denoted as min(1/
D)
max) is:
where ‘[x]’ indicates the largest integer no greater than
x.
This indicates that for certain
β and (
θi,ϕi) (
i = 1,2), the cases of singular mixtures could be avoided by sufficiently large values of
D, the reciprocal of which is smaller than min(1/
D)
max. Further, for the adaptation of varied (
θ2,ϕ2), Equation (33) could be transferred to:
Equations (33) and (34) could be meaningful in the situation where one of the sources is fixed in both of the frequency and its location, while the other source is a moving one. Then it can be told from the two formulas how separated the other source should be from the fixed one in terms of carrier frequencies, to ensure the success of their separation while it is moving within certain region. Such scenario may exist in the acoustic applications with one of the speaker walking around the microphone.
3.2.3. Locations of the Sources
First, it has been revealed by Equation (22) one of the edges of separation via ICA algorithms over spatial filtering (beamforming), that is: When sources arrive from identical (or very close) directions, the separation based on spatial filtering will become invalid; while it is still possible for ICA algorithms to work, so long as there is difference in carriers of the NB sources (D ≠ 1).
Second, it can be seen that sources from varied locations may correspond to identical condition numbers, so long as their DOAs result in the same value of
cosθicosϕi (
i = 1,2). More specifically, for fixed
β,
D and (
θ1,
ϕ1), the mixing matrix would be singular so long as:
Since
cosθ2cosϕ2 ∈ [0, 1], the value of possible
m should be within [−
βcosθ1cosϕ1, (
β/
D) –
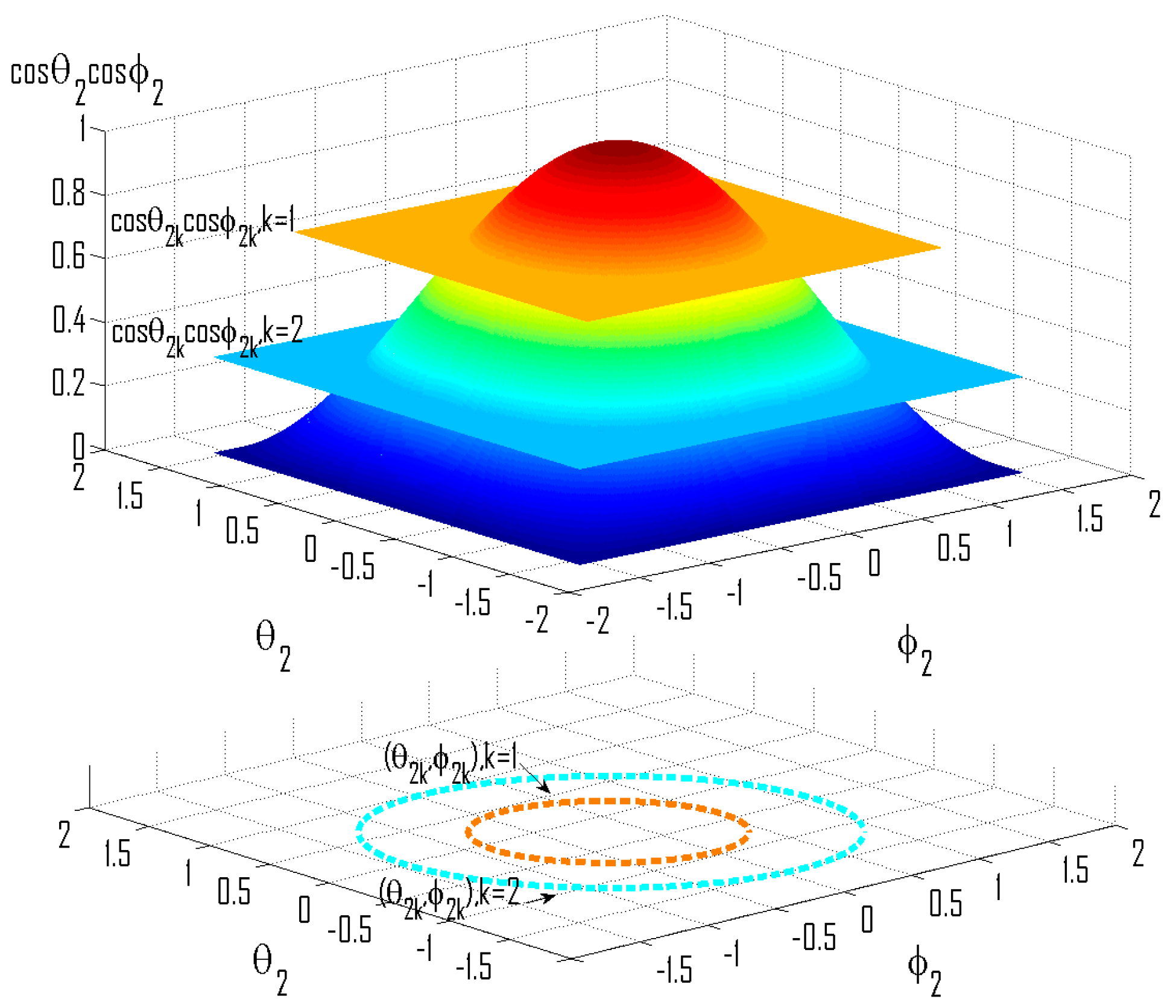
βcosθ1cosϕ1]. Suppose that the set of valid
m is {
mk,
k = 1,2,…}, then for each of its element there are correspondingly a group of (
θ2k,
ϕ2k) satisfying
cosθ2kcosϕ2k = (
Dcosθ1cosϕ1 +
mk∙
D/
β), and this is further depicted by
Figure 5.
To avoid the situation where sources from with certain groups of DOAs become inseparable, controls are necessary on the interval [−βcosθ1cosϕ1, (β/D) – βcosθ1cosϕ1], to reduce the number of integers it includes.
In terms of the element spacing, if
β < 1, then –
βcosθ1cosϕ1 ∈(−1, 0] and (
β/
D) −
βcosθ1cosϕ1 ∈ (−1,1), thus the only possible
mk = 0 and the corresponding
cosθ2kcosϕ2k =
Dcosθ1cosϕ1, while
Dcosθ1cosϕ1 ∈ [0, 1]. On the other hand
D >
β for
βcosθ1cosϕ1 ∈ Z, then the valid
mk = −
βcosθ1cosϕ1 and the mixture may turn singular for
cosθ2cosϕ2 = 0 only; if
for
βcosθ1cosϕ1 ∉ Z, then since (
β/
D) −
βcosθ1cosϕ1 < ⌊
βcosθ1cosϕ1⌋, the valid
mk does not exist. It can be seen that the analysis here is consistent with the conclusions presented in
Section 3.2.1 and
Section 3.2.2.
For situations where values of β and D can be roughly determined beforehand, Equation (35) might provide helpful guidance in the arrangement of the sensors (such as the microphone) in terms of directivities and locations, to possibly avoid singular mixtures.
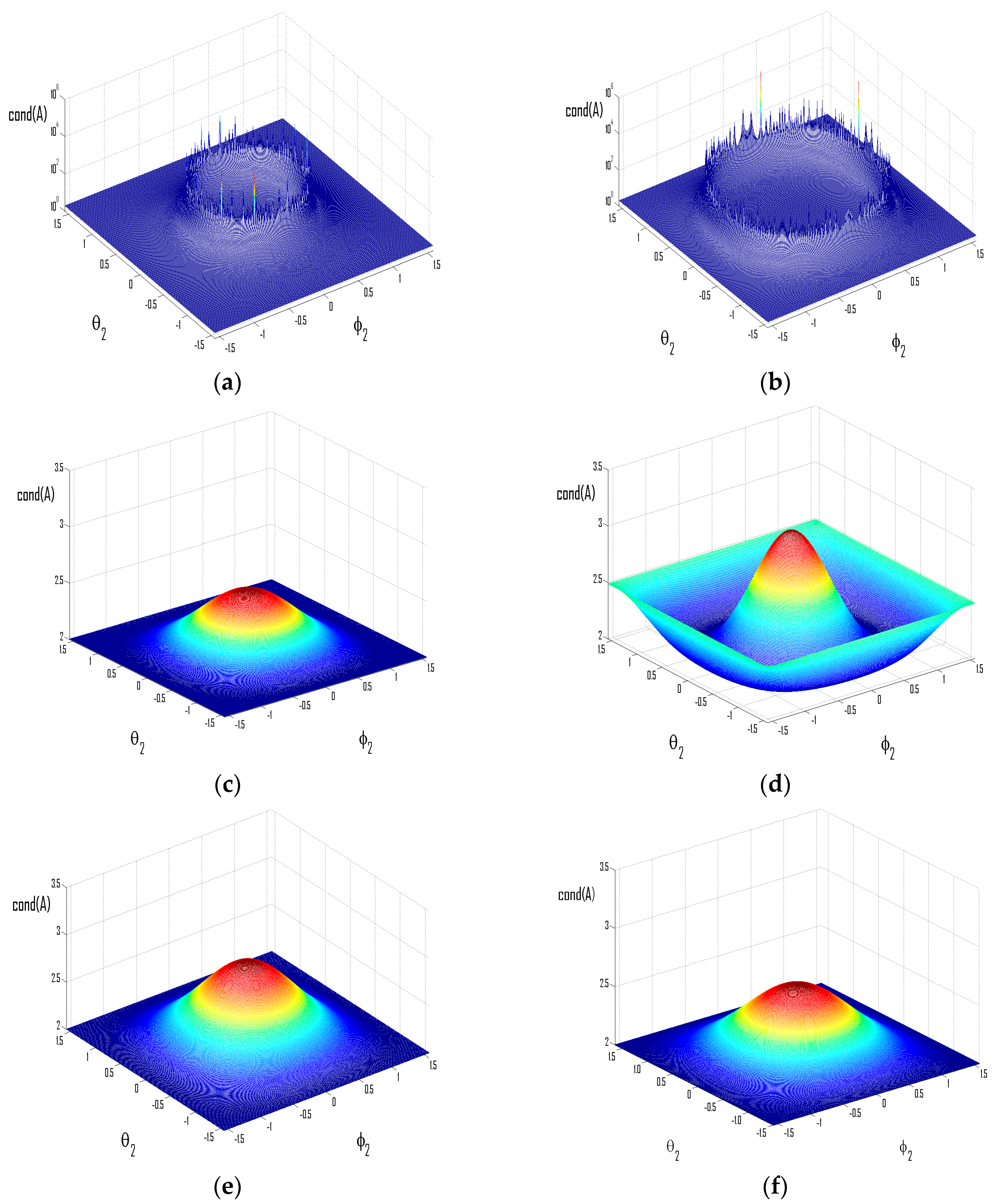
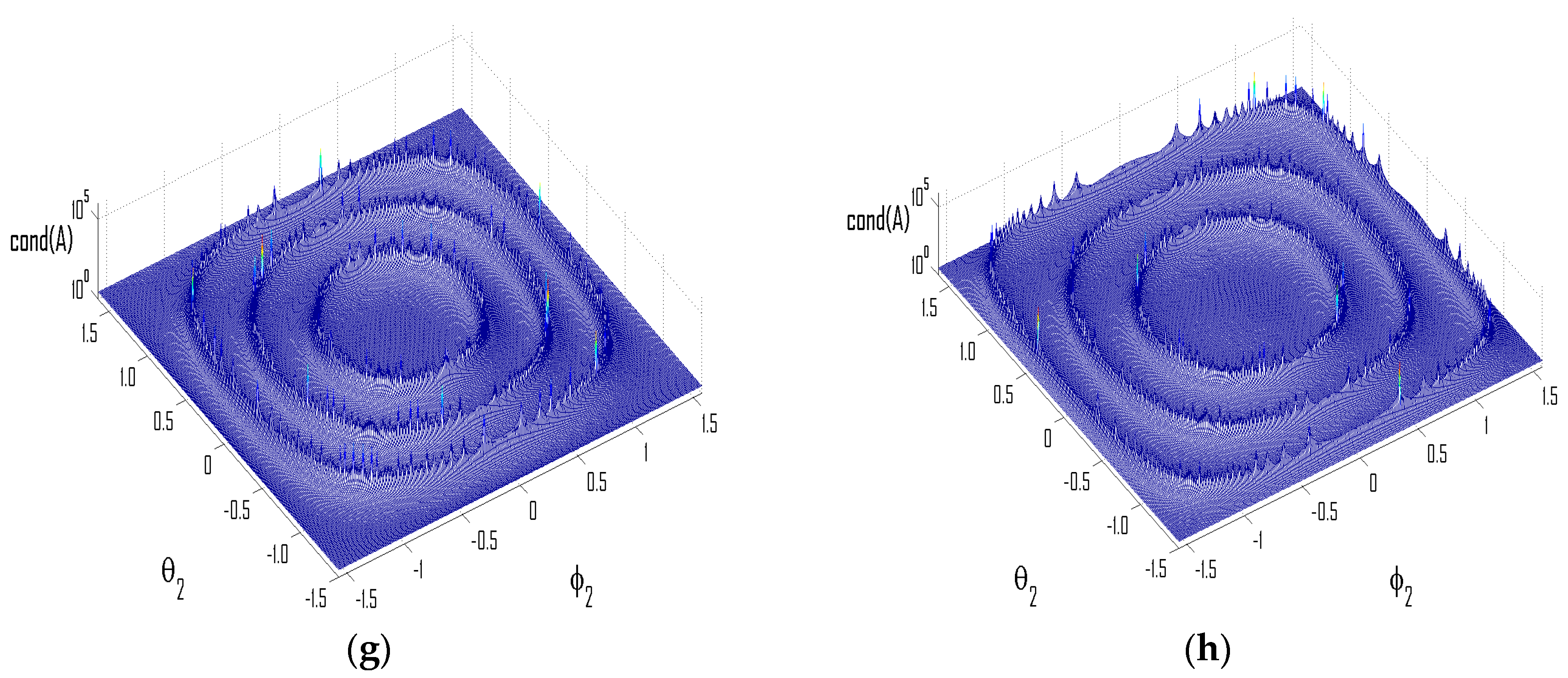
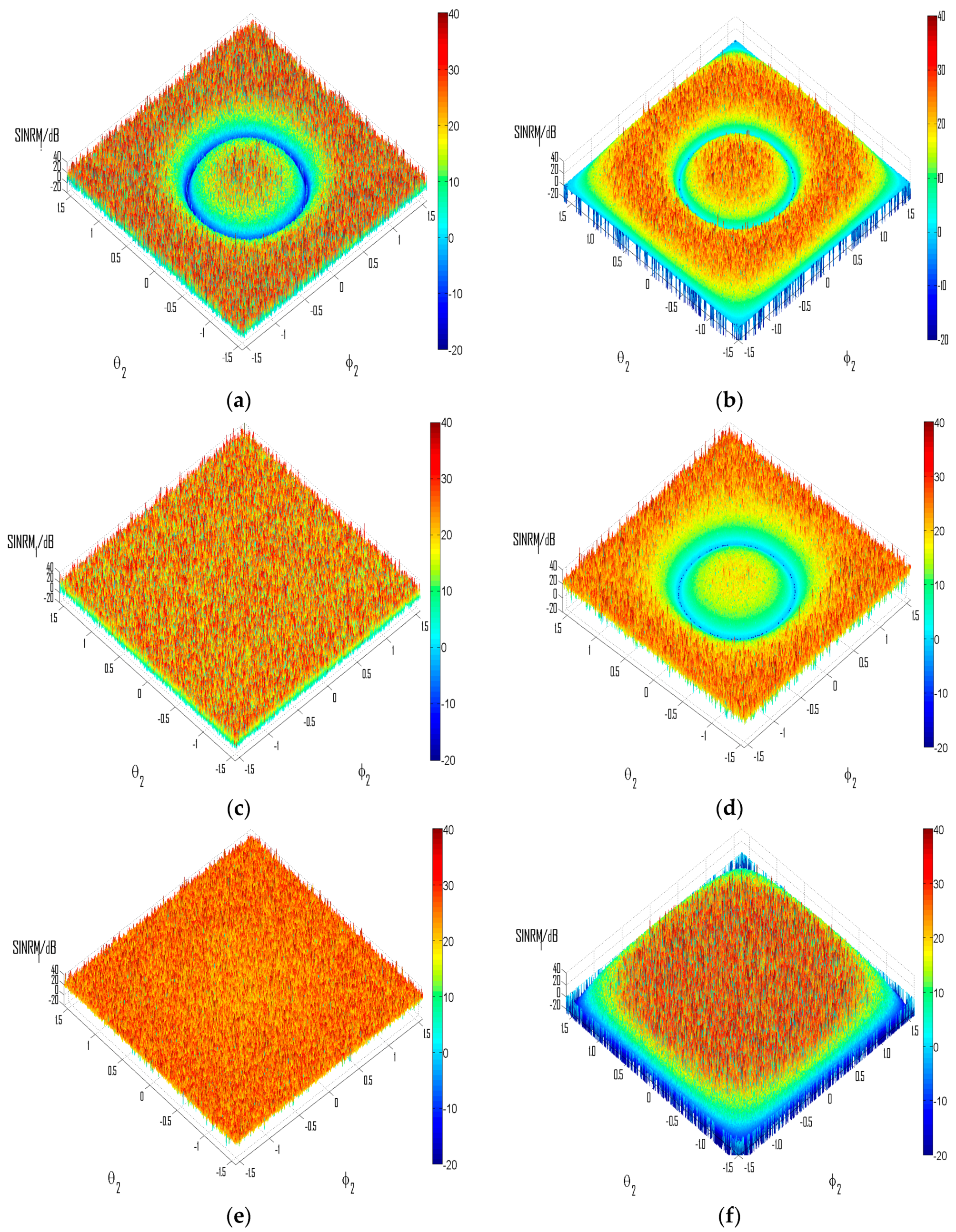
In
Figure 6, condition numbers under varied DOAs have been shown while representative values of
β and
D are set for the sake of illustrating conclusions obtained in this section. In
Figure 6a, the condition number becomes extremely large for a group of (
θ2,
ϕ2) distributed in a circle centered on the origin. Since [–
βcosθ1cosϕ1, (
β/
D) −
βcosθ1cosϕ1] = [−1.5, −0.83] therein and valid
m = −1. It is similar for
Figure 6b where [–
βcosθ1cosϕ1, (
β/
D) −
βcosθ1cosϕ1] = [−1.48, −0.48]. Notice that in
Figure 6g,h, there exist more circles consisting of singular points, since the set of valid
m are {−3,−2,−1} and {−2,−1,0}, respectively. In
Figure 6c,d,
β is set to be smaller than 1, and
Dcosθ1cosϕ1 > 1, thus it can be seen that singular cases have been effectively avoided. In e and f, the value of
D is increased remarkably, and hence, original singular cases are successfully removed. For example, in
Figure 6e
βcosθ1cosϕ1 ∉ Z and
D > (
β/
βcosθ1cosϕ1, −⌊
βcosθ1cosϕ1⌋) = 4, thus according to the previous analysis, there would not be singular points. To conclude, it has been demonstrated in
Figure 6 the validity of conclusions obtained in this section.
3.3. Countermeasure for Singular Mixtures
For most applications, the occurrence of (nearly) singular mixtures would be disastrous, and the intricate actual scenarios have made it somehow inevitable. And here, we attempt to propose certain countermeasure against such situations to avoid extremely poor separation performance.
According to Equation (20), reducing the power of noise could be helpful, possibly via means of band pass filtering. Hence, more effective actions may be taken in terms of changing the condition number.
One straightforward idea is that: when the mixing process is (nearly) singular, certain extra phase delay
Ψ could be introduced into the observations. This could be effective since when the mixtures are (nearly) singular, 2
π(
β/
D)·(
cosθ2cosϕ2 –
Dcosθ1cosϕ1) equals or is quite close to 2
mπ,
m∈Z, and the value of the condition number after the introduction of the extra phase delay would be:
Thus, by setting the proper value of Ψ the revised condition number would be more beneficial for the separation, and the ideal value of Ψ would be (2m + 1)π, m∈Z. Notice that this could not be realized via directly shifting the phase of the mixtures, since it can be deduced from Equations (8) and (10) that this actually would not change the condition number. In practice, Ψ could be introduced through shifting the mixtures along the axis of the observation time.
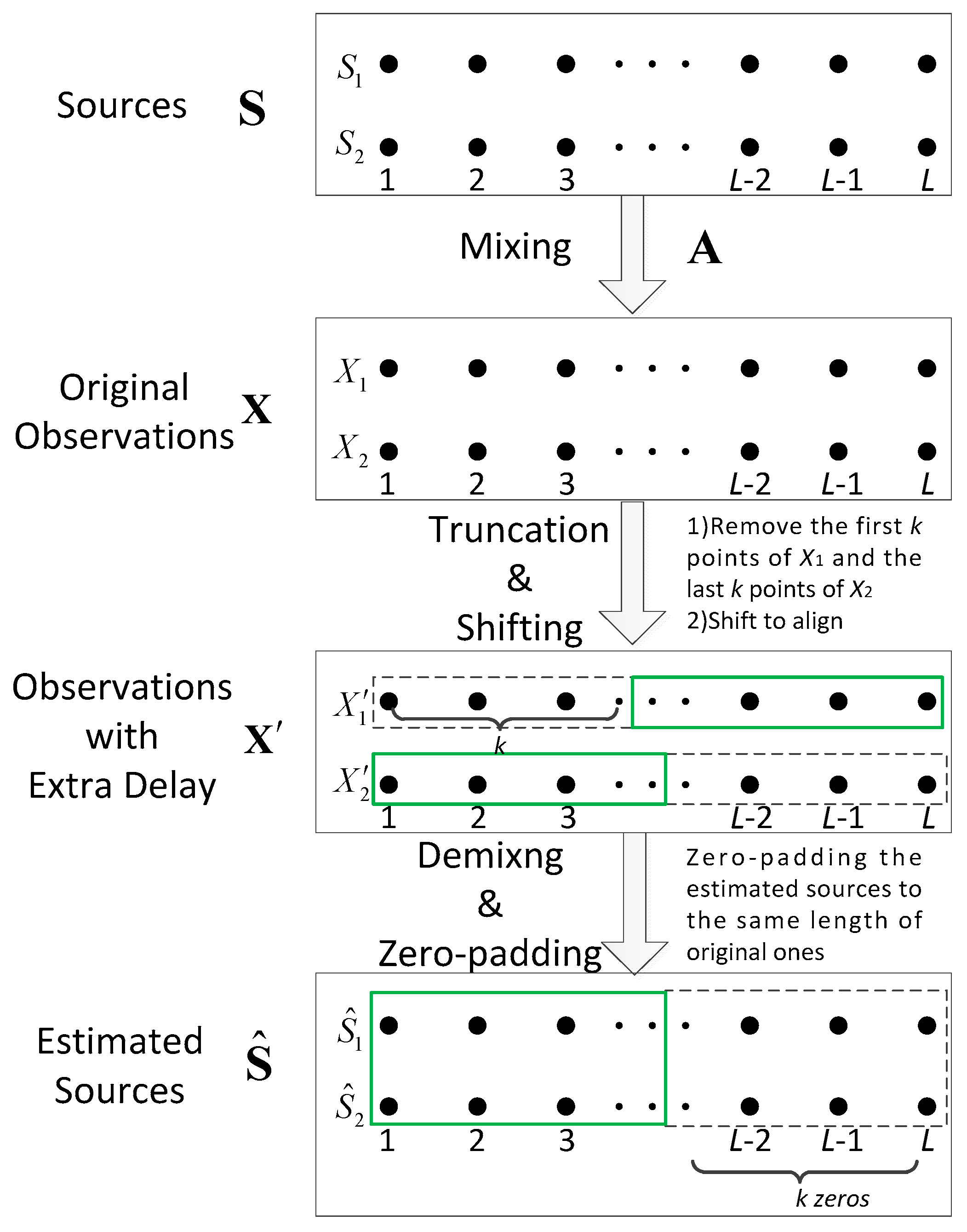
More specifically, consider the following scheme depicted by
Figure 7. The idea here is that the introduction of extra phase delay in Equation (22) is achieved with one of the observations undergoing an artificial time-lag. For instance, if the observation from the second sensor is shifted backward by
k points, then the equivalent phase delay introduced is:
in which
Ts is the sample interval.
It should be stated that the proposed scheme is only designed to combat the situations of (nearly) singular mixtures. In fact, only when originally 2
π(
β/
D)·(
cosθ2cosϕ2–
Dcosθ1cosϕ1) is close to 2
mπ,
m∈Z can it be ensured that the extra phase delay is constructive rather than destructive. One of the actual problems is judging the singularity of the current observations and deciding whether the proposed procedure is needed. Since the condition number of the mixing matrix and the SINR at the output is generally hard to obtain, the correlation coefficient
ρ can act as one practical criterion [
34]. For random variables
x(
ξ) and
y(
ξ), their correlation coefficient is defined as:
in which
cxy is the cross covariance of
x(
ξ) and
y(
ξ),
and
are the variances of them.
The idea is that when the original mixing matrix is (nearly) singular, it can be seen from Equation (8) that the two observations would be (approximately) coherent, and the module value of the correlation coefficient between the two observations would approach 1. More specifically, since the sources are presumed to be zero-mean and independent, it can be calculated from Equations (8) and (38) that the module value of the correlation coefficient between the two observations (denoted as
ρx1x2) equals:
in which
and
are the variances of the sources. Hence, it can be seen that while
cond(
A) = ∞,
; and while
cond(
A) = 2,
; if
, then for
cond(
A) = 2,
, which means then the two observations are orthogonal.
In practice, a threshold associated with the noise level and the number of samples can be set based on experience, and when the module value of the correlation coefficient between the observations exceeds the threshold, the mixtures can be regarded as (nearly) singular. And then the proposed scheme should be adopted. During our simulations, it is found that generally speaking 1 or 2 should be suitable under most scenarios.
4. Simulations
In this section, experiments are carried out using Intel(R) Core (TM) 2 Duo CPU E6550 @ 2.33 GHz and MATLAB 7.12.0(R2011a).
Experiment 1: Separation performance of ICA algorithms under varied noise levels and the singularity of the mixing matrix.
In this experiment, quadrature phase shift keying (QPSK) and binary phase shift keying (BPSK) signals are adopted as sources with carrier frequencies 0.38, 0.127 MHZ, and symbol rates 2, 1 Kbps, respectively. The sample rate is set as 1 MHz, and the observation length is 1024. The receiving array consists of two sensors with the element spacing being two times the wavelength of source 1. The DOA of source 1 is (25.1°, 40.5°), while the elevation angle of source 2 is 27.9°.
The SNR at the input of the separator and the SINRM adopted here as the measurement for separation performance are defined as in [
35]. Typical ICA algorithms tested include: FastICA [
22], EASI [
23] and Infomax [
24]. The initialization of the demixing matrix is generated randomly. The non-linear function selected for FastICA is
G(
y) = log(0.1 +
y), with more options listed in [
22]; the adaptation step for EASI is 0.01, and the nonlinearity is chosen as
gi(
y) = |
yi|
2yi for 1 ≤
i ≤
P; the updating step for Infomax is 0.1, and the nonlinearity is selected in the form of
gi(
y) = –|
yi|
αi – 1sign(
y), 1 ≤
i ≤
P, with
αi = 2. Results are obtained with 500 times of Monte Carlo simulations.
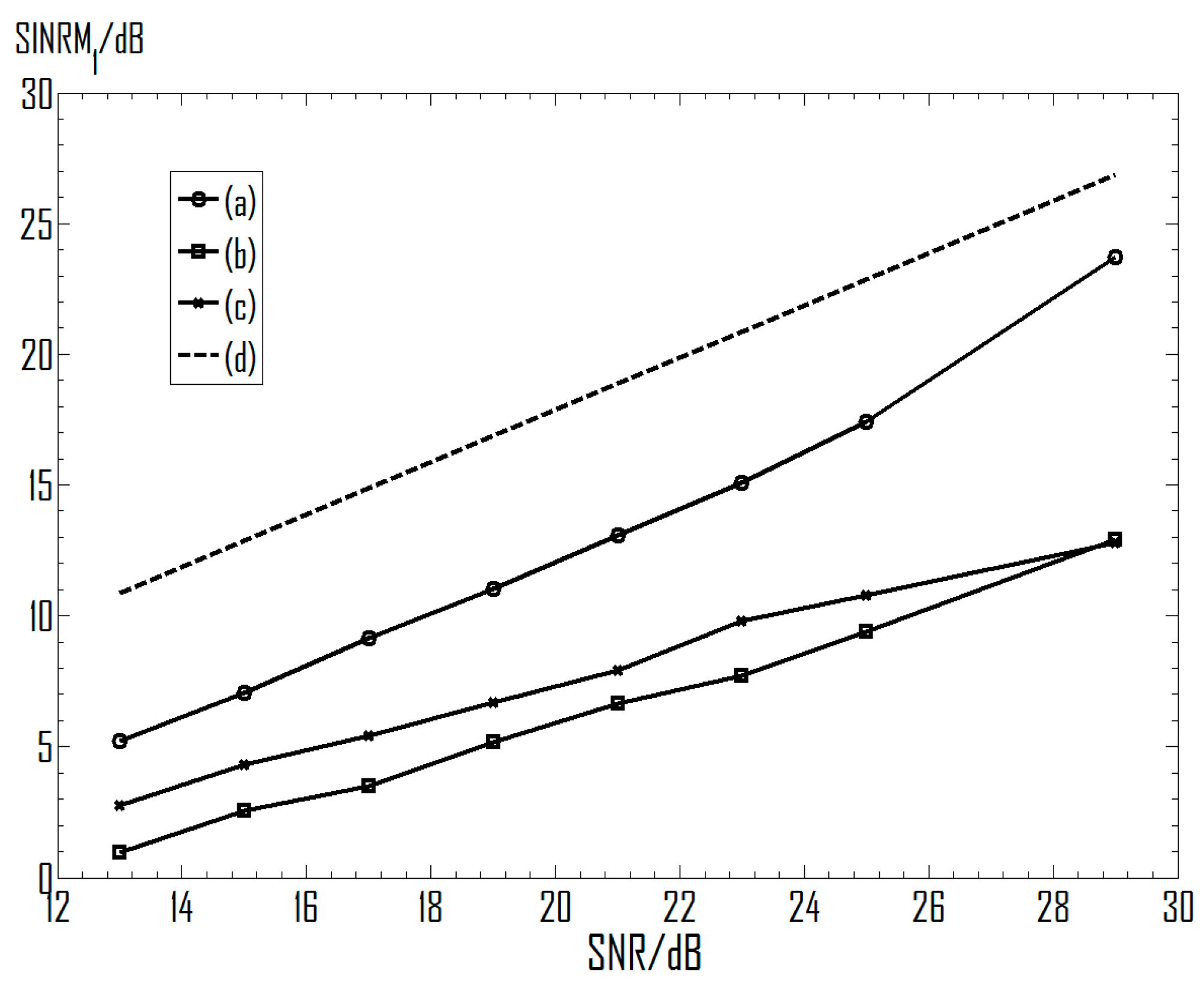
Figure 8 shows curves of SINRM
1 varying with the input SNR, in which the azimuth angles of source 2 is −81.1°, and thus the condition number is 2.56. It can be seen that for these representative ICA algorithms, their performances measured by the SINR increase along with input SNR. More specifically, curves of the three algorithms are roughly parallel with the theoretical upper limit indicated by (d), which means that their output SINRs vary almost linearly with the input SNR. Take the FastICA as an example, while the SNR increases from 19 dB to 21 dB, the output SINR increases from 11.04 dB to 13.06 dB.
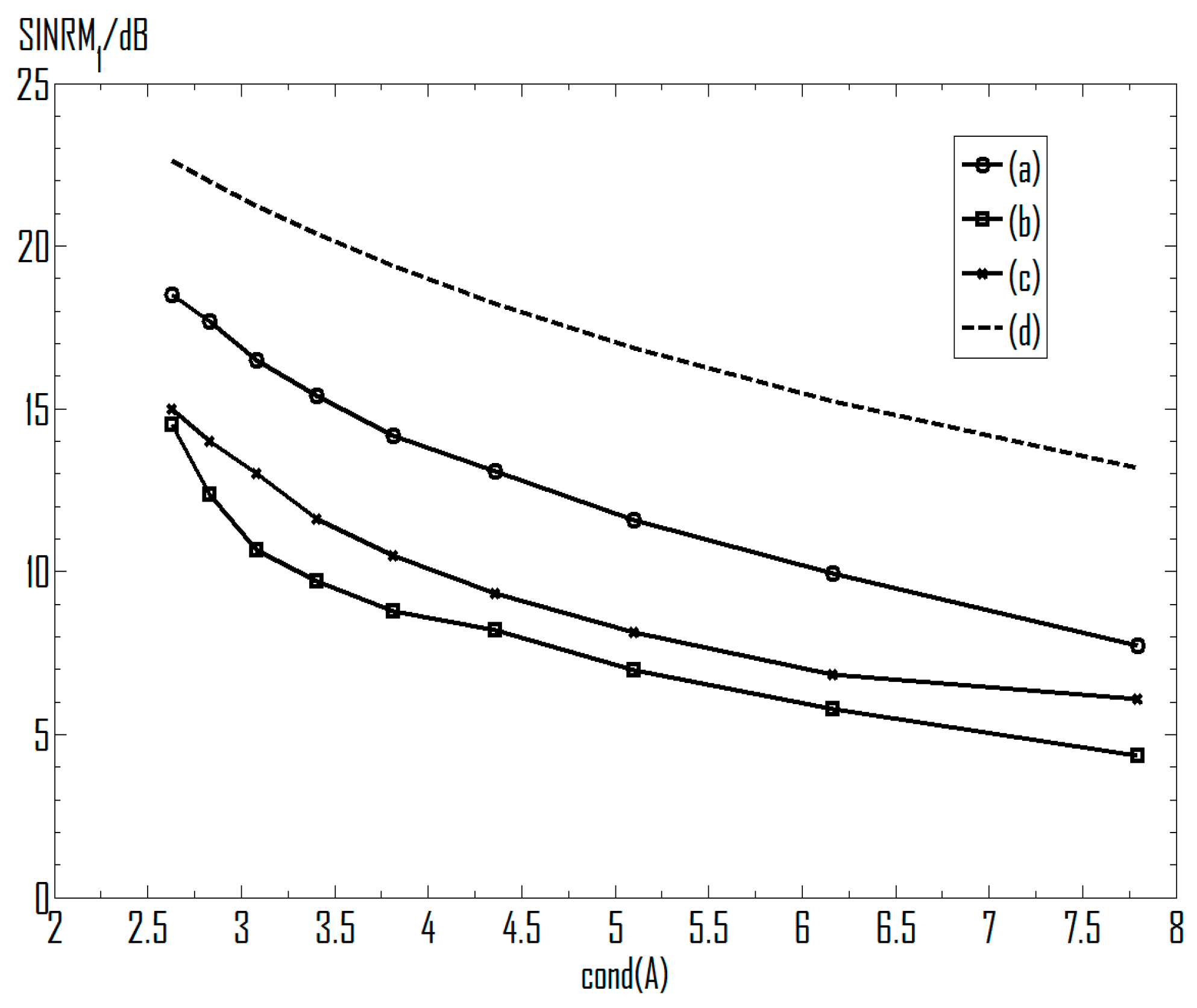
Figure 9 demonstrates the SINRM
1 under varied condition numbers, and the different condition numbers are controlled by the azimuth angle of source 2. It can be seen that the SINRs measuring the performance decrease along with the increase of the condition number. Curves of their performance are all below the theoretical line based on Equation (20), and are varying in a nearly parallel way with the curve (d). For instance, in curve (a), the output SINR decreases by 2.21 dB (from 9.93 dB to 7.72 dB) when the condition number increases from 6.17 to 7.79. This is close to the result obtained with Equation (20), since 20log(7.79/6.17) ≈ 2.03.
In general, results obtained in this experiment have demonstrated well the influence of the environmental noise and the condition number on the separation performance of typical ICA algorithms, and do not conflict with the theoretical limitation indicated by Equation (20).
Experiment 2: Separation performance and practical factors.
In this experiment, the same sources have been adopted, except that the carrier frequency of source 2 is set according to different values of
D tested. The DOA of source 1 is (30°, 30°) in
Figure 10a,c,e, and (−45°, 45°) in
Figure 10b,d,f. The performances have been demonstrated with representative values of
β and
D, as well as for source 2 from all possible directions. The input SNR is set at 30 dB. Since it has been demonstrated in
Figure 8 and
Figure 9 that performances of typical ICA algorithms are all influenced by the condition number in ways alike, only results from the FastICA algorithm as described in Experiment 1 are presented, while similar results have been obtained with other ICA algorithms mentioned in Experiment 1 during our simulations.
Figure 10 demonstrates the SINRM
1 under varied practical factors simulating possible actual scenarios. It can be seen that in
Figure 10a,b, the separation performance endures dramatic deterioration (at least 15 dB) for source 2 from certain groups of directions. This is because in
Figure 10a, [–
βcosθ1cosϕ1, (
β/
D) –
βcosθ1cosϕ1] = [–1.5, –0.83], thus
m = –1 is valid as analyzed in
Section 3.2.2, and the deterioration of performance occurs for
cosθ2cosϕ2 = (
Dcosθ1cosϕ1 –
D/
β); for
Figure 10b, valid
m = [–1, 0], and thus corresponding
cosθ2cosϕ2 = [0, 0.75] (notice that groups of (
θ2,
ϕ2) correspond to
cosθ2cosϕ2 = 0 distribute on the edge of
Figure 10b). In
Figure 10c,d,
β is reduced to be smaller than 1. For
Figure 10c, since
Dcosθ1cosϕ1 > 1, the singular cases have been completely avoided for source 2 from all possible directions; while in
Figure 10d,
Dcosθ1cosϕ1 < 1, thus the mixture would turn singular for
cosθ2cosϕ2 =
Dcosθ1cosϕ1, though with
β < 1.
In
Figure 10e,f, the value of
D is set according to Equation (34). In
Figure 10e, since
βcosθ1cosϕ1 ∉ Z,
D is set to be greater than (
β/
βcosθ1cosϕ1,–⌊
βcosθ1cosϕ1⌋) = 4; in
Figure 10f,
βcosθ1cosϕ1 = 1, thus
D >
β > 2 should be enough for the prevention of singular cases and we set
D = 3; and it should be noticed herein that the mixture would still become singular for
cosθ2cosϕ2 = 0, which is straightforward from Equation (22). To conclude, the experiment has validated the conclusions obtained in
Section 3.2 about the influence of fundamental practical factors on the separation performance, especially those concerned the cases of singular mixtures.
Experiment 3: Effectiveness of the proposed countermeasure against singular mixtures.
In this experiment, the carrier frequencies of the QPSK and BPSK sources are set at 0.4 MHz and 0.2 MHz respectively, thus
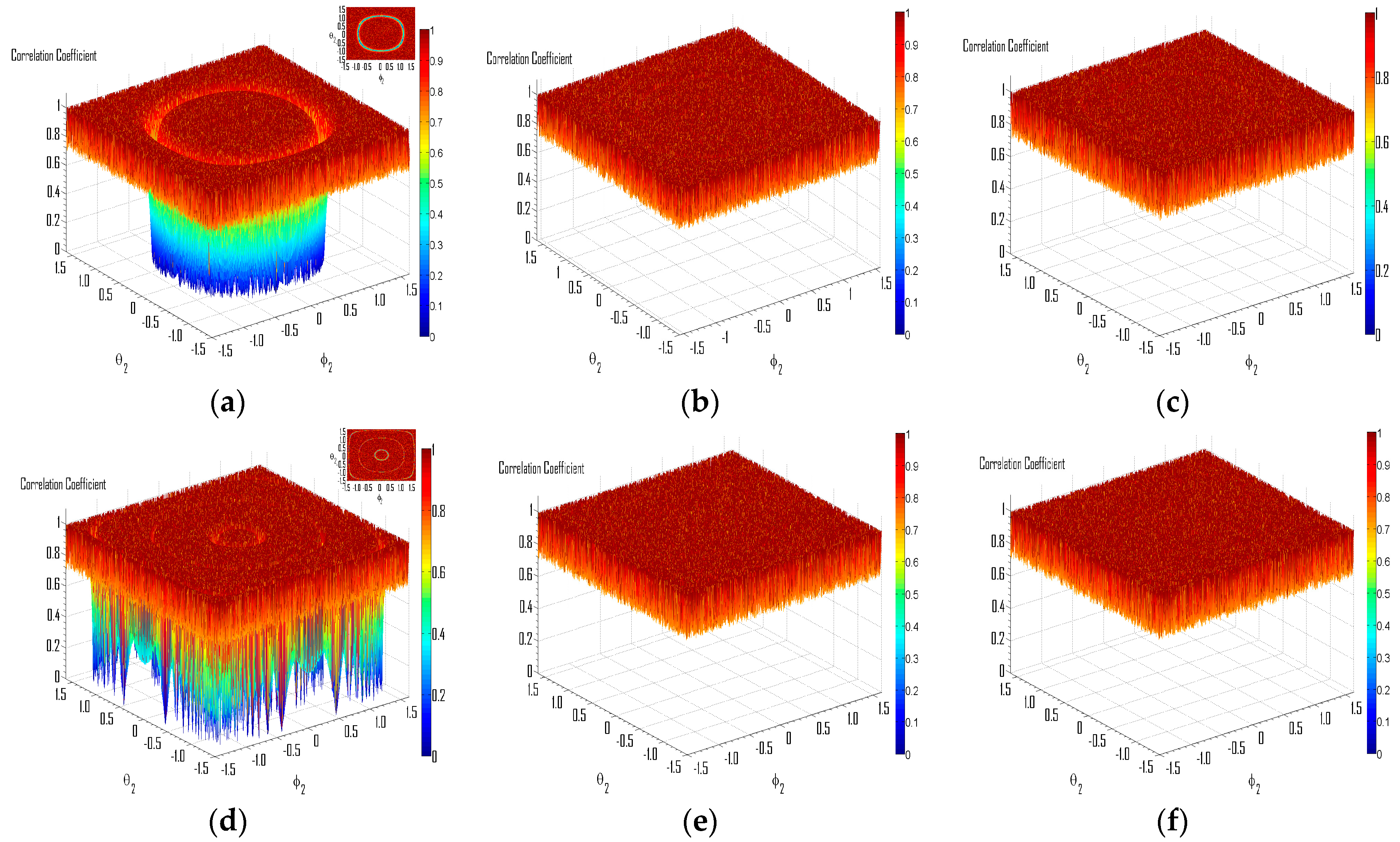
D = 2. The DOA of source 1 is (56°, 63°). The sampling frequency is 1.2 MHz and the length of observation is 5120. The input SNR is 30 dB. After numerous experiments, the threshold of the correlation coefficient for judging the singular cases is chosen as 0.99. In
Figure 11, the correlation coefficient between source 1 and its corresponding restitution component is adopted as other measurement of performance. In
Figure 11a–c,
β = 0.75; and in
Figure 11d–f,
β = 4.5.
Figure 11a,d demonstrate the separation performance, without the proposed countermeasure. It can be seen that the restitution quality is unsatisfactory while source 2 is from certain directions (the distribution of such DOAs of source 2 can be seen clearer in the subplot northeast of
Figure 11a,d). In
Figure 11b,e, the proposed countermeasure has been adopted and
k = 1. Thus, the extra phase delay introduced for these singular cases is
Ψ1 = 2
πkTs(
f2 −
f1) =
π/3; and since
k = 2 in
Figure 11c,f, the extra delay therein is
Ψ2 = 2
π/3. It can be seen that restitution qualities in the originally singular points have been dramatically improved, and the failure of separation has been effectively avoided. Thus, the effectiveness of the proposed countermeasure for the singular mixtures has been validated.
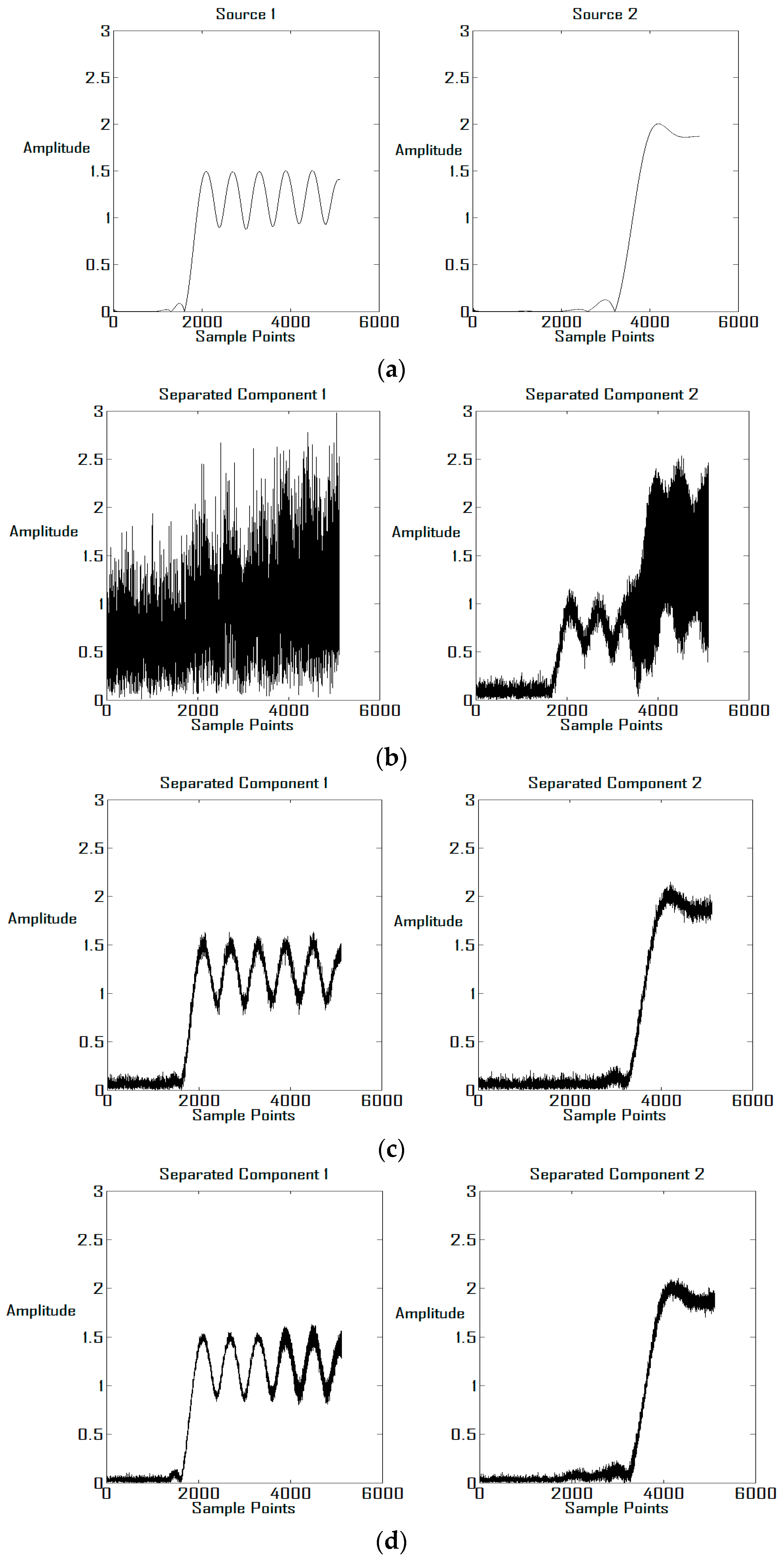
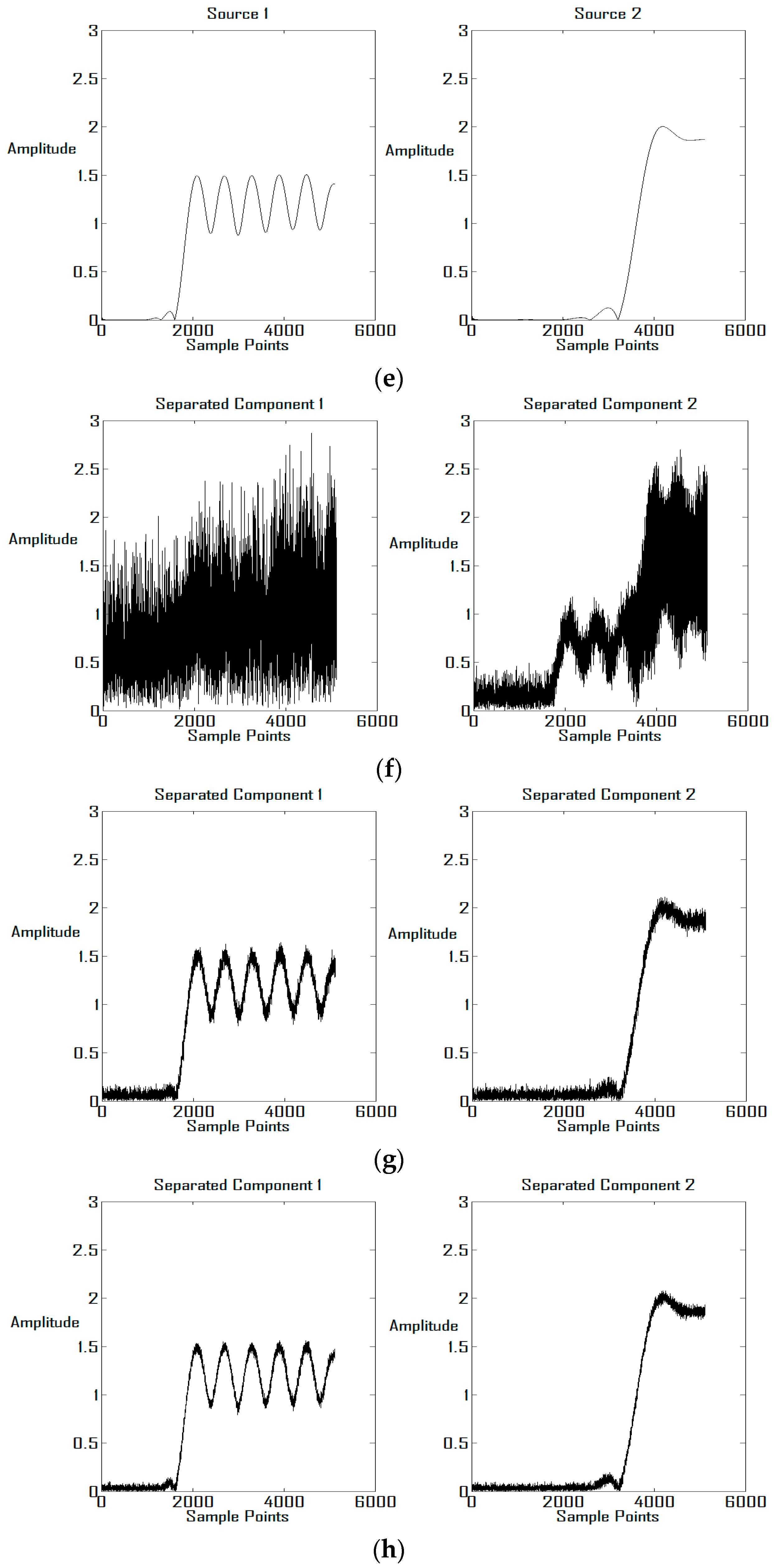
In
Figure 12, the waves of the sources and their estimations are demonstrated to show the improvement of the restitution quality in a more explicit way.
Figure 12a presents the original sources in
Figure 11a–c. In
Figure 12b, the recovered components for DOA of source 2 being (−11.5°, 61.2°) (the corresponding condition number is 46.7) have been presented, and we can see that the distortion in the wave forms is unbearable. In
Figure 12c,d, the proposed scheme is applied for the same situation, and it is obvious that the restitution quality has been improved significantly. Similar analysis can be done for
Figure 12e–h, which correspond to
Figure 11d–f.
5. Conclusions
In this paper, the performance of ICA algorithms in sensor arrays is fully discussed. First, the analytic connection between the environment noise variance, the source variance, the condition number of the mixing matrix and the optimal signal to interference-plus-noise ratio is deduced in Equation (20). It indicates quantitatively how the separation performance would be determined by the environment noise level and the singularity of the mixing process. Next, the relationships between several fundamental practical factors in sensor array receiving and the condition number are analyzed in detail. Factors concerned include the element spacing of the array (depicted by the parameter
β), the frequencies (depicted by the parameter
D) and locations of the sources (depicted by the DOAs of sources). Generally speaking, it is found that: (1) the condition number varies with the element spacing in a periodical way, with the period is determined by
D and DOAs; (2) the condition number also varies with the reciprocal of
D periodically, and the period is determined by
β and DOAs; (3) as for the locations of sources, we discover that sources from varied locations may lead to identical condition numbers, so long as their DOAs result in the same value of
cosθicosϕi (
i = 1,2). Considering its significance for applications, the situations where the mixtures become singular have been paid special attention to. Main conclusions concerning the prevention of singular cases include: (1) the cases of singular mixtures can be well prevented for sources with diverse carriers and from all possible directions, so long as the element spacing of the array is smaller than wavelengths of the sources. And the only possible exception exists when
cosθ2cosϕ2 −
Dcosθ1cosϕ1 = 0, then the mixture would be singular regardless of
β; (2) for certain
β and (
θi,
ϕi)(
i = 1,2), the cases of singular mixtures could be avoided by sufficiently large values of
D, the reciprocal of which is smaller than min(1/
D)
max in Equation (34). Moreover, a countermeasure for the singular cases has been proposed, based on the introduction of extra phase delay. And in reality, the scheme is realized with one of the observations undergoing artificial time-shifting. Conclusions and the effectiveness of the proposed countermeasure are validated by succeeding experiments. As a whole, conclusions and results obtained in this paper could be instructive while applying ICA algorithms in sensor arrays or designing the receiving array, especially for the prevention of critical failure in separation. Future works may focus on analyzing the effects of more complicated practical factors such as the multi-path effect or array calibration imperfection, which would involve more complex model of the array output and coupling among different kinds of factors. Also, the effectiveness of the proposed scheme in
Section 3.3 could be further promoted, possibly based on the interpolation of the observations to allow better control on the value of the extra phase delay by changing the sample interval. Since the desired phase delay is (2
m + 1)
π,
m ∈ Z in theory.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













