The developed RMDI technique is composed of two functional modules, which are the wave velocity computation (WVC) and the damage index parameters (DIPs). In the WVC function module, the dynamics of the laminated composites is modeled by the combination of classical laminated plate theory (CLPT) [
16] and finite element modelling [
17], the wavenumber-frequency relationships can then be determined for a composite laminate. From the results of wave dispersion relations, the wave group velocity of the
mode can be calculated out. In the DIPs function module, the multi-functional multi-metrics (referred as MFMMs) are newly proposed and developed as rapid multi-damage index parameters to analyze the variations in Hilbert time-frequency spectra and in energy time spectra due to structural flaws, and further they are used to process the sensor response data, infer the presence of damage such as delaminations, quantify the extents of delaminations, and simultaneously locate various delaminations in combination with the
group velocity of the propagating waves. Moreover, the MFMMs are also enabled to trace the amount of increasing damage by their individual prediction trend curves.
2.1. Determination of the Group Velocity of Propagating Waves
Lamb waves are the most widely used guided ultrasonic waves for structural damage inspection, because they can travel long distances and be applied with conformable piezoceramic transducers. Furthermore, guided Lamb waves are also able to interact with flaws in a structure due to the wave propagation properties that are highly sensitive to any discontinuity in materials. In our study, an actuation mode of sweep frequencies [60 kHz, 200 kHz] was used to generate the different low-frequency probing waves from an actuator, where the maximum frequency of 200 kHz used is much below the boundary threshold of 300 kHz between the low frequency and high frequency. Actually, the factors that are the actuation frequency, the property and structure of a composite such as the layup and thickness can determine how many Lamb wave modes exist in the composite structure. Thus for a given composite with the certain stacking sequence, fiber direction and actuation frequency, there exists a finite number of propagation modes specified by their phase velocities.
In that case, for the purpose of simplicity of analysis, it was considered that only the two fundamental modes
and
propagate in the tested composite panels. Since the wavelength of
mode in this frequency range is above 16 mm, this mode should not be very sensitive to the defects. On the contrary, the wavelength of
mode is below 10 mm (the short wavelength) in this frequency range, and thus only the
mode is sensitive to the interlaminar delamination. To predict the
group velocity of the propagating waves in a composite structure, the wavenumber-frequency relationships should be constructed, once the bending stiffness coefficients and the mass of the composite structure are obtained. And then, the wave group velocity can be easily deducted from the evaluated wave dispersion relations. For the low-frequency wave propagation, the CLPT theory is retained to compute the wave group velocity of the
Lamb mode from the evaluated wavenumber-frequency relationships. For the high-frequency wave propagation, a finite element model constructed by Cortes [
17] with the consideration of the shear deformation was used to predict the Lamb wave propagations in the CFRP panels. In our damage identification applications, the low frequency
mode is more suitable to inspect and identify the inter-laminar delaminations in the tested composite panels.
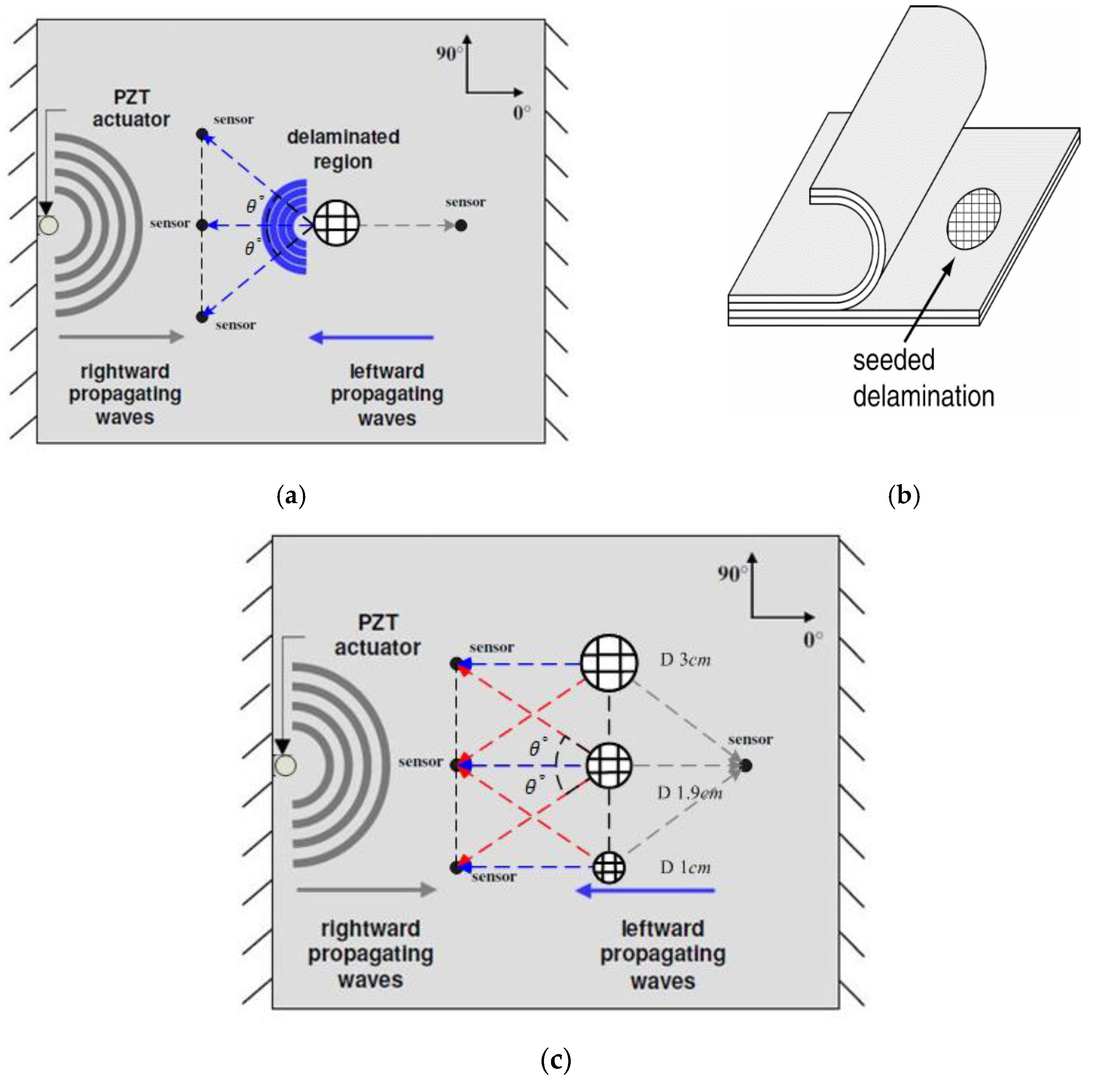
In order to precisely locate multiple delaminations in a composite panel, we need to be aware of the information regarding the angular dependence of group velocity of Lamb wave. By using the two parameters of wave propagation that are the group velocity of
mode and the time of flight (TOF) acquired by the developed multi-damage index algorithm detailed in
Section 2.2, the locations of multiple delaminations can be inferred. Then, the relationship between group velocity and wave propagation angle
θ is established by evaluating group velocity variation with different propagation directions. In order to obtain an actual distribution map of group velocities with regard to variable propagation angles, an experiment of the wave velocity measurements needs to be implemented. In the experiment, the propagation directions of
and
are the same as those defined in
Section 3. The direction of
is the wave propagation direction paralleling to the longer side of the experimental specimen and pointing from the actuator toward the delamination center, and the direction of
is the direction of an anticlockwise rotation of
from the
direction. Meanwhile, 24 sensing nodes were laid evenly on a circle with a radius of
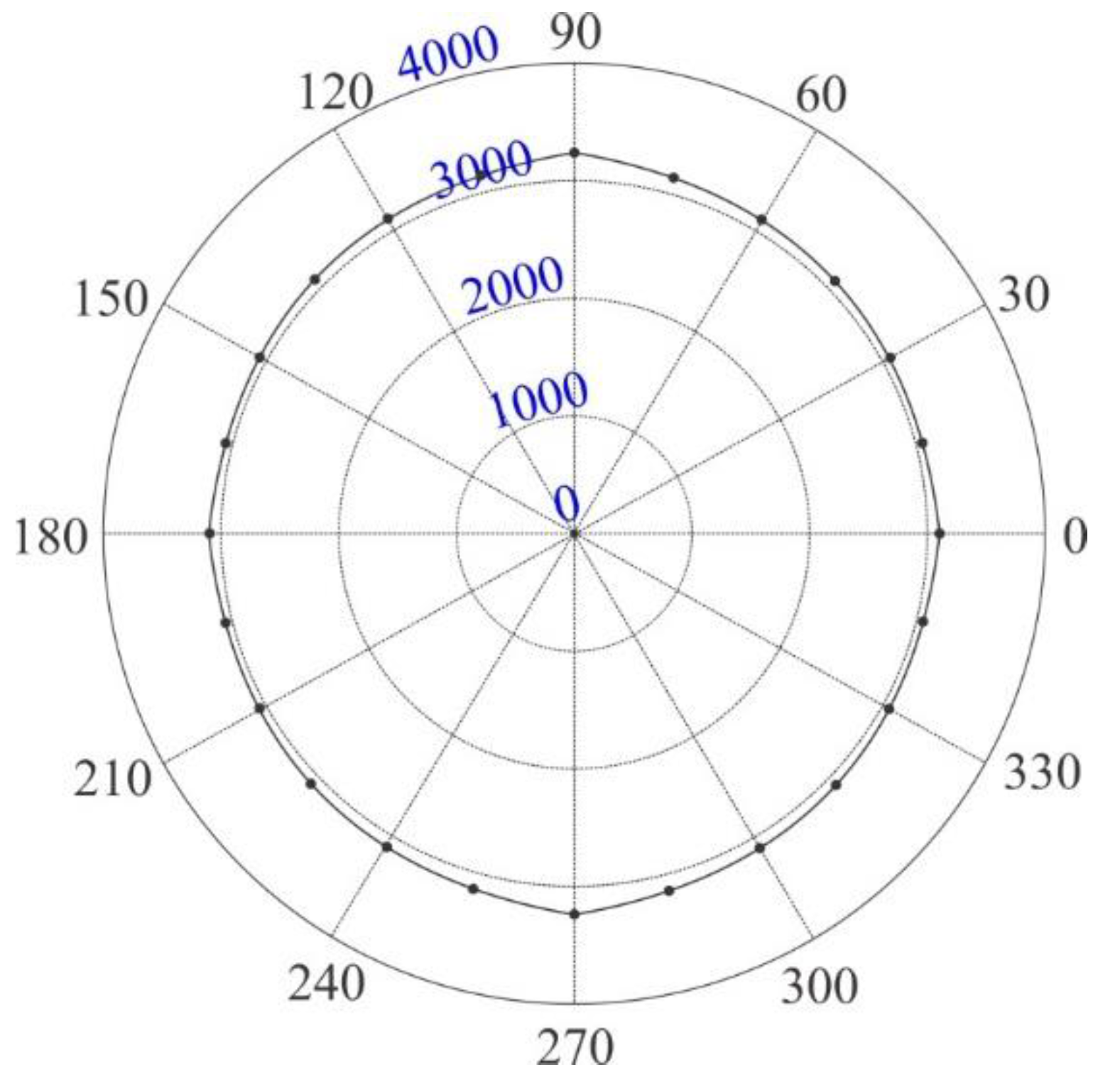
, and an actuator was arranged in the circle center to excite a series of Lamb waves. This actuator and sensor layout enables our acquisition of group velocity estimations along the direction of each sensing node. After applying a voltage signal to the actuator, Lamb waves were excited and propagate through the specimen. The response signals from the sensing nodes were also collected within the actuation frequency range of 60–200 kHz, which is consistent with that used in the damage identification tests. The distribution map of group velocity as the function of propagation angles was evaluated along all of the 24 propagation directions, which were formed through the variation of every
in the angular range from
to
. For the
ith propagation direction, the angle
,
i = 0, 1, …, 23,
. The group velocity
at the direction of the
ith sensing node can be assessed by adopting a general strategy that is given by Equation (1):
where
is the ratio between the radius
of the circle of sensing nodes and the time of flights of the propagating wave packages measured;
is the time duration
along the direction of the
ith sensing node for
mode. It is given by
, where
denotes the moment regarding the energy peak of the actuation from the actuator; and
denotes the moment with regard to the energy peak of the actuation sensing from a sensing node
i.
can be calculated through the developed damage index parameter—the energy time-phase shift metric—obtained by the rapid multi-damage index algorithm (MDIA), which is detailed in
Section 2.2. The measurement of sensor signals for group velocity evaluations was repeated six times, which were performed automatically by a specific setting in the measurement equipment of acousto-ultrasonics. The group velocity profile takes the average values
of group velocities at the 24 propagation angles, which is obtained from the varied excitation frequencies (60–200 kHz) repeated in six measurement times. The distribution map of the angular dependence of group velocity will be presented and detailed in
Section 3.
It is a challenge to select an effective estimation method of TOF, as the accurate extraction of the time of arrival of the instantaneous waveform is very difficult in complex and adverse environments such as recorded sensor signals having low signal-to-noise ratio [
18]. A method for obtaining the energy time-phase shift metric has been proposed to attempt to overcome the difficulty. To rapidly and automatically obtain the needed TOFs, the energy-time spectra of collected sensor signals need to be acquired through the approach of the fast ensemble empirical mode decomposition (FEEMD) based Hilbert spectral analysis. Then by analyzing and extracting the peak phase shift information from the energy-time spectra, the time of arrival of excitation signals at both the actuator and the sensor can be captured and therefore the TOF for the group velocity estimation can be obtained. The detailed computation procedure of the damage index parameter is described in the ETPSM part, where it is illustrated that how the damage index TOF is calculated from the energy time spectrum. Some other methods have been also proposed and applied to the estimation of time of arrival for propagation waves using some algorithms, such as the threshold, peak-signal [
19], double peak [
20] and peak on-set time picking methods [
18]. These methods pick the time of arrival based on the collected original signals and are relatively vulnerable to the uncertainty of signal noise levels. Our method determines the time of arrival based on the decomposed signals relying on FEEMD. The signals extracted by the decomposition contain the most significant components of original signals and are eliminated off noises, so that they are less oscillated and can facilitate more robust and evident searching for peak positions in the energy-time spectrum. The more advantages of the proposed method based on the FEEMD decomposition will be also supplemented in
Section 4.1.
Once the group velocity is determined, the location of any damage can be inferred using the multi-damage index parameters—multi-functional multi-metrics. Accordingly, they are suitable for online structural health monitoring.
2.2. Rapid Multi-Damage Index Algorithm Based on Multi-Functional Multi-Metrics
The proposed rapid multi-damage index algorithm (MDIA) is composed of two metrics that are the energy density metric and the energy time-phase shift metric. The rapid MDIA is then used to process the signal data from the sensor dynamic responses, infer the presence of any damage, determine the locations of damage, and diagnose the extents of damage. Meanwhile, the rapid MDIA is also shown to trace increasing amount of damage based on the multi-functional multi-metrics. It therefore has the potential to promote the development of damage visualization techniques.
In order to interpret the benefits of this rapid multi-damage index algorithm, the fundamental concepts and formula with respect to the Hilbert transform and corresponding analytical signal processing methods are introduced as follows.
It supposes that a time domain signal
, and its Hibert transform
is defined as:
The corresponding analytical signal
originated from the signal
can be expressed as:
The benefit of the analytical signal
obtained lies on the possibility to determine uniquely the genuine time-dependent variables. Then, there are the instantaneous parameters in Equation (3):
is defined as an envelope function describing the instantaneous amplitudes of the original signal
:
and
is defined as a phase function describing the instantaneous phase of the original signal
versus time:
For the multi-damage identification purpose, a sensor signal is first processed through the fast ensemble empirical mode decomposition so as to get the intrinsic mode functions (IMFs), which admit well-behaved Hilbert transform.
2.2.1. Fast Ensemble Empirical Mode Decomposition (FEEMD) and Hilbert Spectral Analysis
The fast ensemble empirical mode decomposition is a new noise-assisted adaptive time-frequency data analysis method. It overcomes largely the scale (mode) mixing problem of the traditional empirical mode decomposition (EMD) [
21] and provides physically unique decompositions. Essentially, it overcomes the main drawback of the traditional EMD when it is applied to data analysis with mixed and intermittent scales [
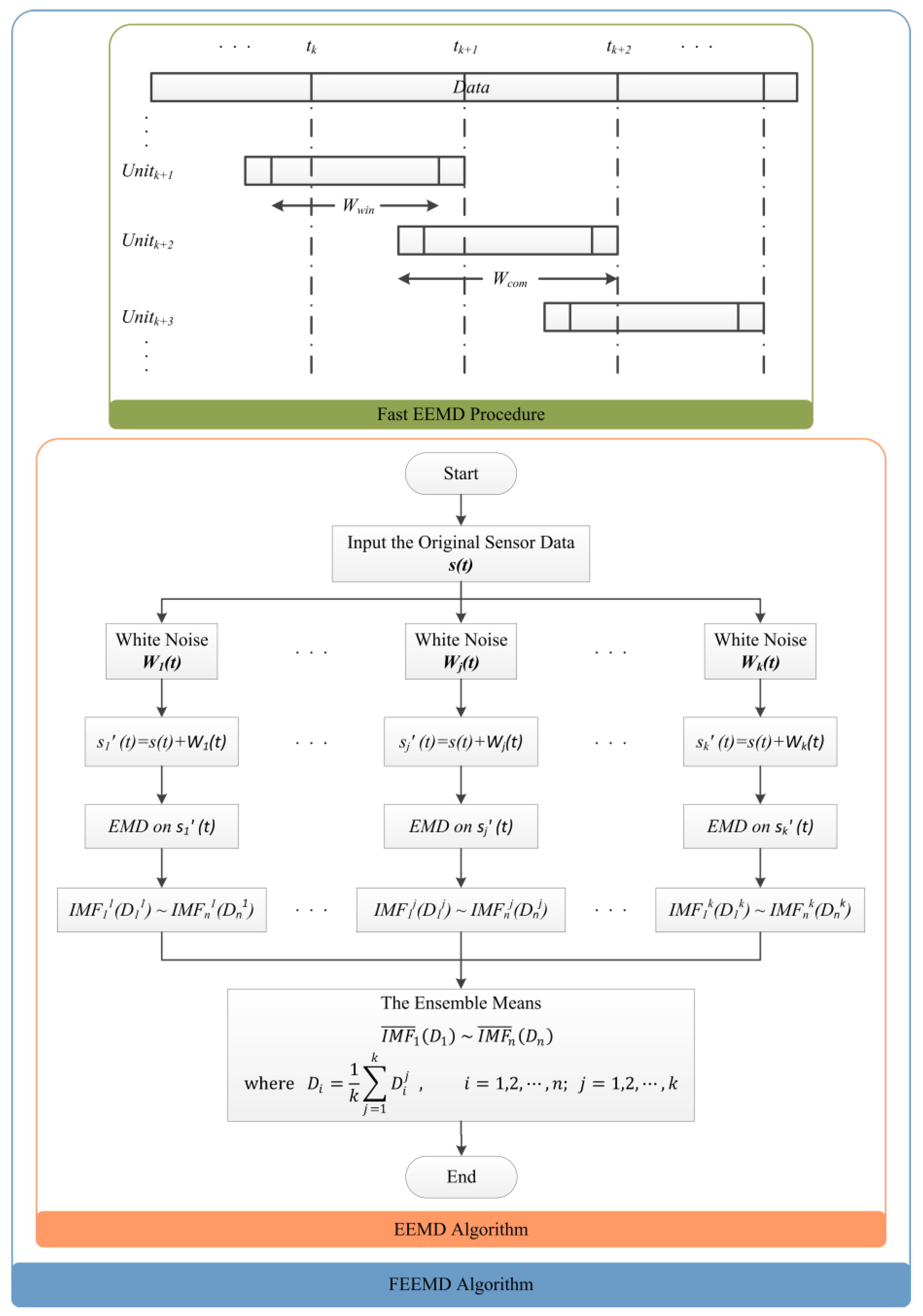
22]. In the FEEMD decomposition process, the genuine intrinsic mode function (IMF) components are defined as the mean of an ensemble of trial divisions, and each trial consists of the decomposed signal plus a white noise of finite amplitude. By means of this ensemble mode, the scales can be separate clearly and naturally without any priori subjective criterion selection. Accordingly, the FEEMD becomes a truly dyadic filter bank for any sensor response data using the scale separation principle of the EMD. Through implanting finite noises, the FEEMD removes automatically the mode mixing problem in all cases. To clarify the computation and decomposition process, the flow chart in
Figure 1 summarizes the major procedure of the FEEMD on a non-stationary sensor signal data recorded.
In the decomposition procedure of FEEMD, the original sensor response data are decomposed into a collection of intrinsic mode functions (IMFs). For instance, an original sensor signal
is decomposed into
IMFs
and can be expressed as:
where the residue
is a mean trend, from which no more IMF need to be extracted. It has been left out on purpose from the decomposition. From Equation (6), any given complex sensor data nonlinear or nonstationary can be decomposed into a set of simple intrinsic mode functions. IMFs are simple oscillatory functions and regarded as the basis of the expansion of the sensor data. As an effective IMF, it should satisfy the following conditions: (1) the number of extrema should be equal to the number of zero crossings; (2) the mean value of the envelopes defined by local extrema should be zero. To obtain IMF components
, an iterative sifting procedure was implemented.
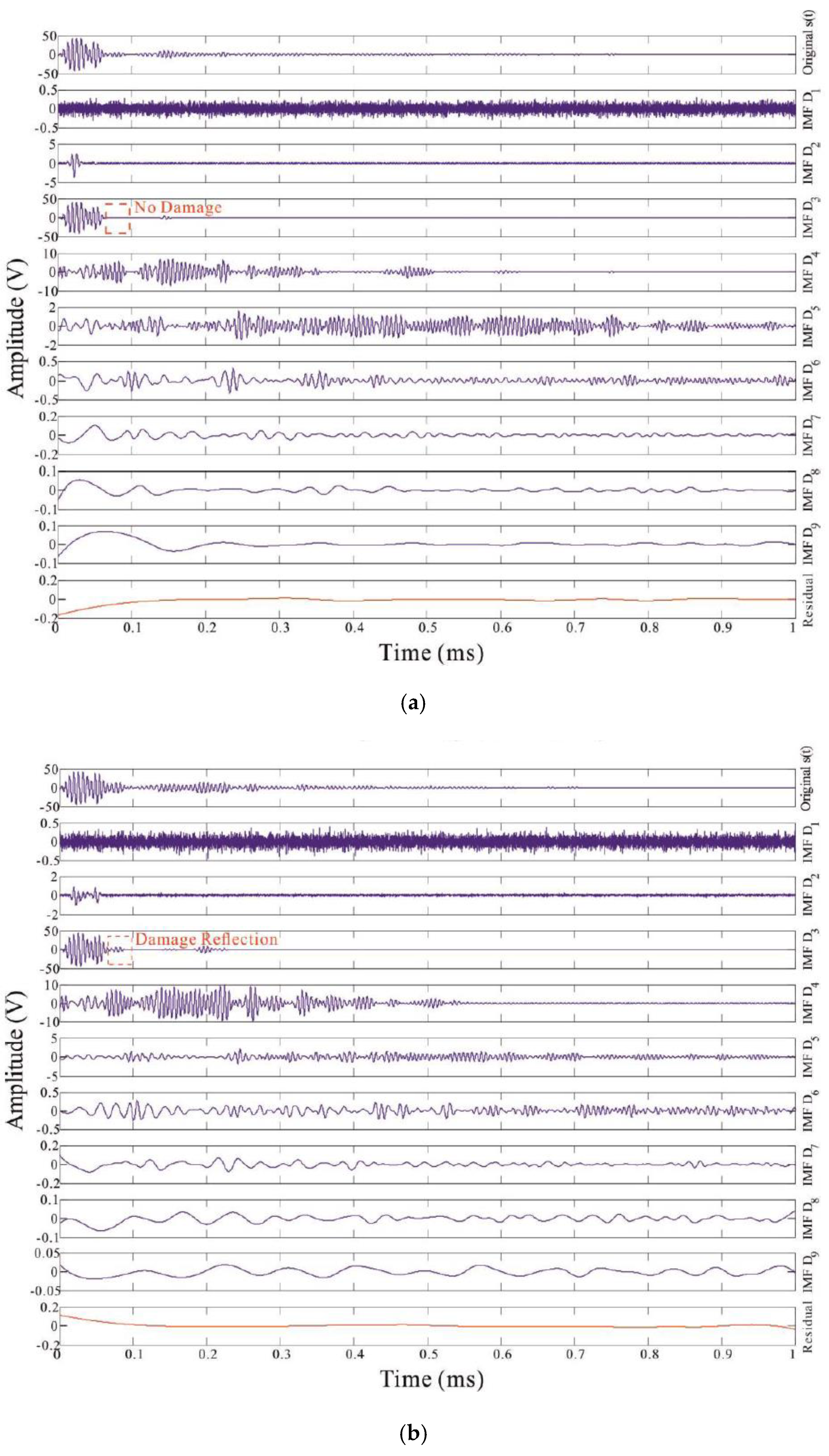
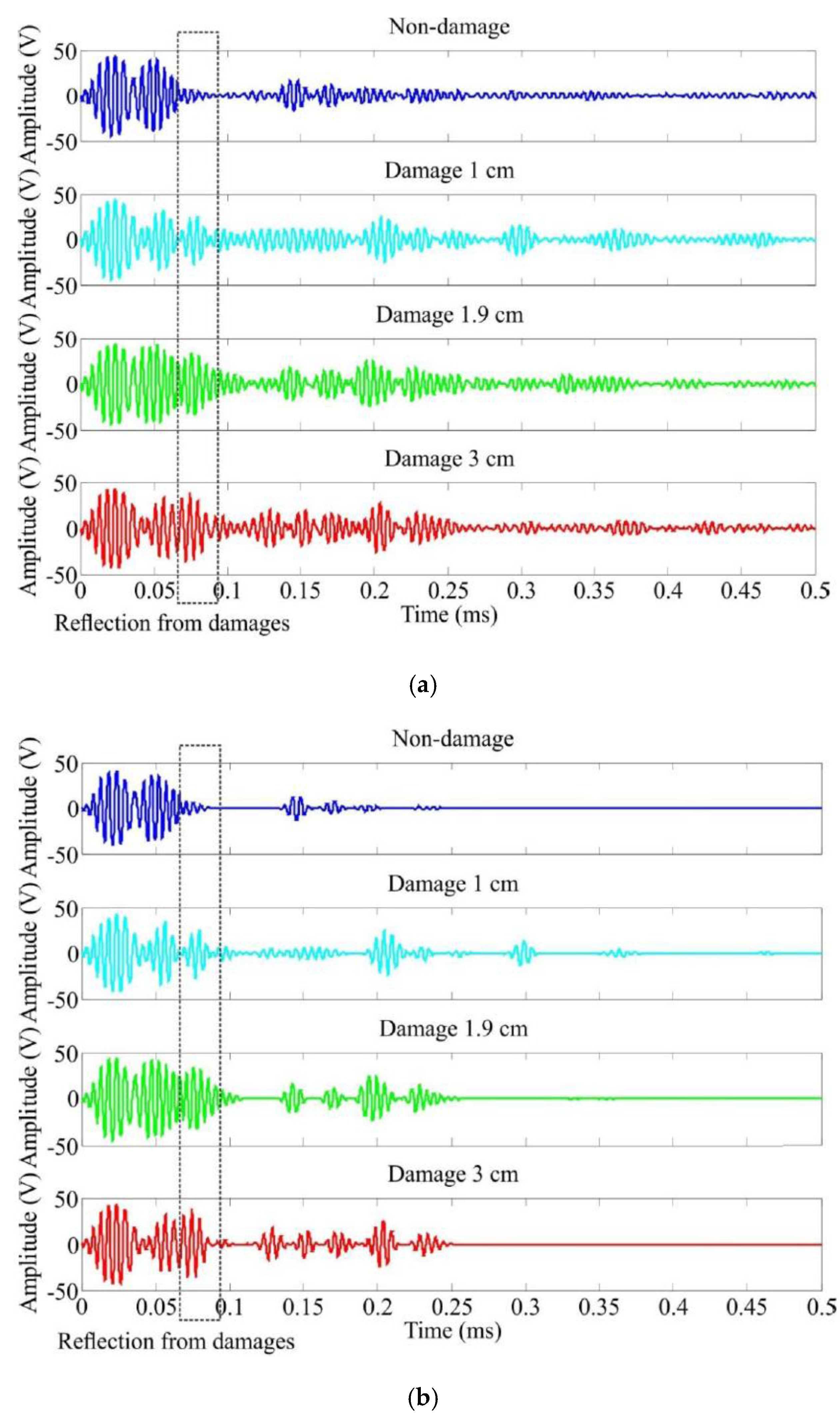
To interpret the advantage of the FEEMD, it is demonstrated that a case on non-damage and damage in an anisotropic composite panel structure. And the waveform from the excited diagnostic signal is made up of a 5-peaks narrow-band sine tone burst at 160 kHz modulated by a cosine Gaussian envelope. The decomposed IMFs resulting from the FEEMD processing on the selected sensor response signals are shown in
Figure 2.
Through FEEMD decomposition processing, any measured sensor data in time domain can be decomposed into
n empirical modes. In other words, any sensor data from structural responses is mostly composed of different intrinsic modes of oscillation. As a result, each IMF is a frequency- and amplitude-modulated signal so that the IMFs have well-behaved Hilbert transformations. Then through the corresponding Hilbert transforming for the IMFs, any variation due to possible damage could be localized on the time as well as the frequency axis in the generated time-frequency spectrum. Meanwhile using the independent IMFs obtained from FEEMD decomposition, an evident full energy-time-frequency distribution for a given complex sensor data can be presented in the spectrum so that the local energy density and the instantaneous frequency can be obtained easily. In this way, with the property of time-dependent amplitudes and frequencies, each intrinsic mode function can therefore be treated as an individual signal, into which the Hilbert transform can be applied by:
where
is a monotonic component signal, which has a positive instantaneous frequency and a monotonically increasing phase. Actually in the Hilbert space, an original sensor data
given can be expressed as the combination of each analytic signal corresponding to each IMF
, or as a real part (RE) of the complex expansion:
This approach of the FEEMD with Hilbert spectral analysis used in damage identifications is fundamentally different from the conventional Fourier transform method, of which the constant amplitude, frequency and other related information in frequency domain are derived from Fourier representations, as the instantaneous amplitude and angular frequency in Equation (8) are both the functions of time t. Thus, a time-frequency spectrum can be obtained by the integration of over the entire data period, and indicates the total energy contribution from each frequency value of the sensor data. In a word, the HSA-FEEMD method is suitable for complex data processing, especially in structural damage inspection applications, discovering tiny variation in oscillation during wave propagation.
2.2.2. Multi-Damage Index Parameters—Multi-functional Multi-Metrics (MFMMs) Based on HSA-FEEMD
The aim of the proposed multi-damage identification technique is to discover new damage index parameters, which can extract effectively and identify accurately complete multiple damage information. To realize an integrated damage inspection system, the different hierarchical goals of structural health monitoring (SHM) are classified, which include the presence of any damage, its location, its severity and the prediction of the remaining service life of a structure. From the measurement of a specific physical property of a monitored structure such as damping, stiffness, energy, etc., a functional metric will become the key tool to give the necessary information about possible or diverse damaged situations. Thus, there are two defined multi-damage index parameters (MDIPs) used into the rapid multi-damage identification technique, which are the energy density metric and the energy time-phase shift metric. They are both robust and efficient functional metrics for multiple damage inspection in composite structures.
Energy Density Metric (EDM)
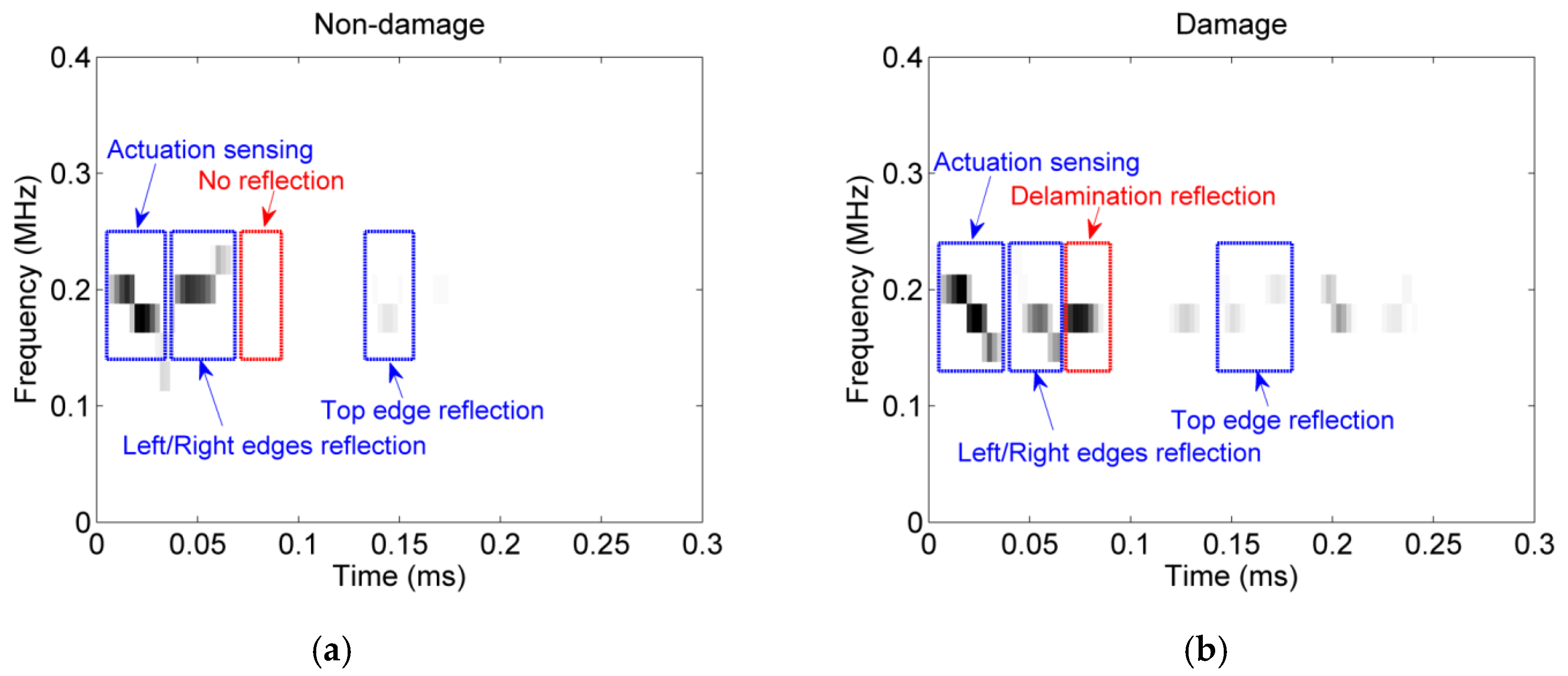
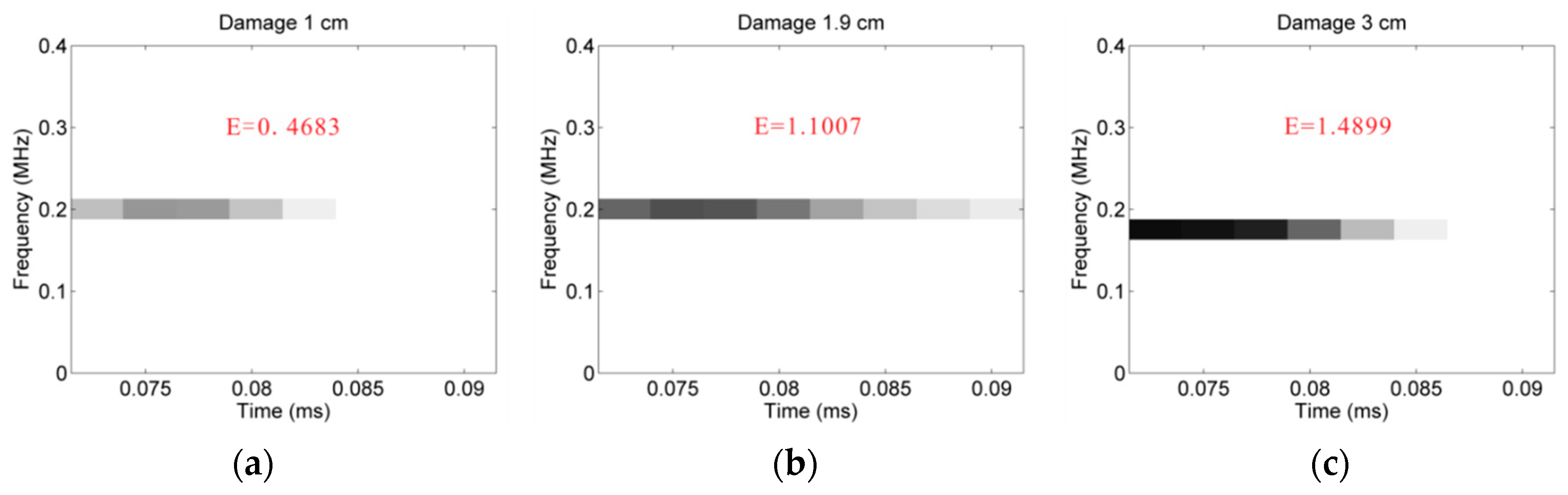
A wave is an energy transport phenomenon. It travels through a medium such as a solid plate, and transports energy from one location (or its source) to another location without transporting matter. The amount of energy carried by a wave is thus related to the amplitude of the wave. Accordingly, the collected sensor signals are used to produce the corresponding energy time-frequency spectra. The energy time-frequency spectrum is defined as energy density metric that is obtained from the squared values of the instantaneous amplitudes. The amplitudes are deduced by the Hilbert transform of the high-energy IMFs. This metric is designated as a damage index parameter that can provide a high definition energy time-frequency representation. And also it can describe precisely the frequency content of any non-stationary or nonlinear signal based on the FEEMD process. Hence, the different features concealed in sensor signals can be revealed and better understood. In view of these reasons, an energy density spectrum needs to be found and used to identify and assess structural damage from the reflected wave energy.
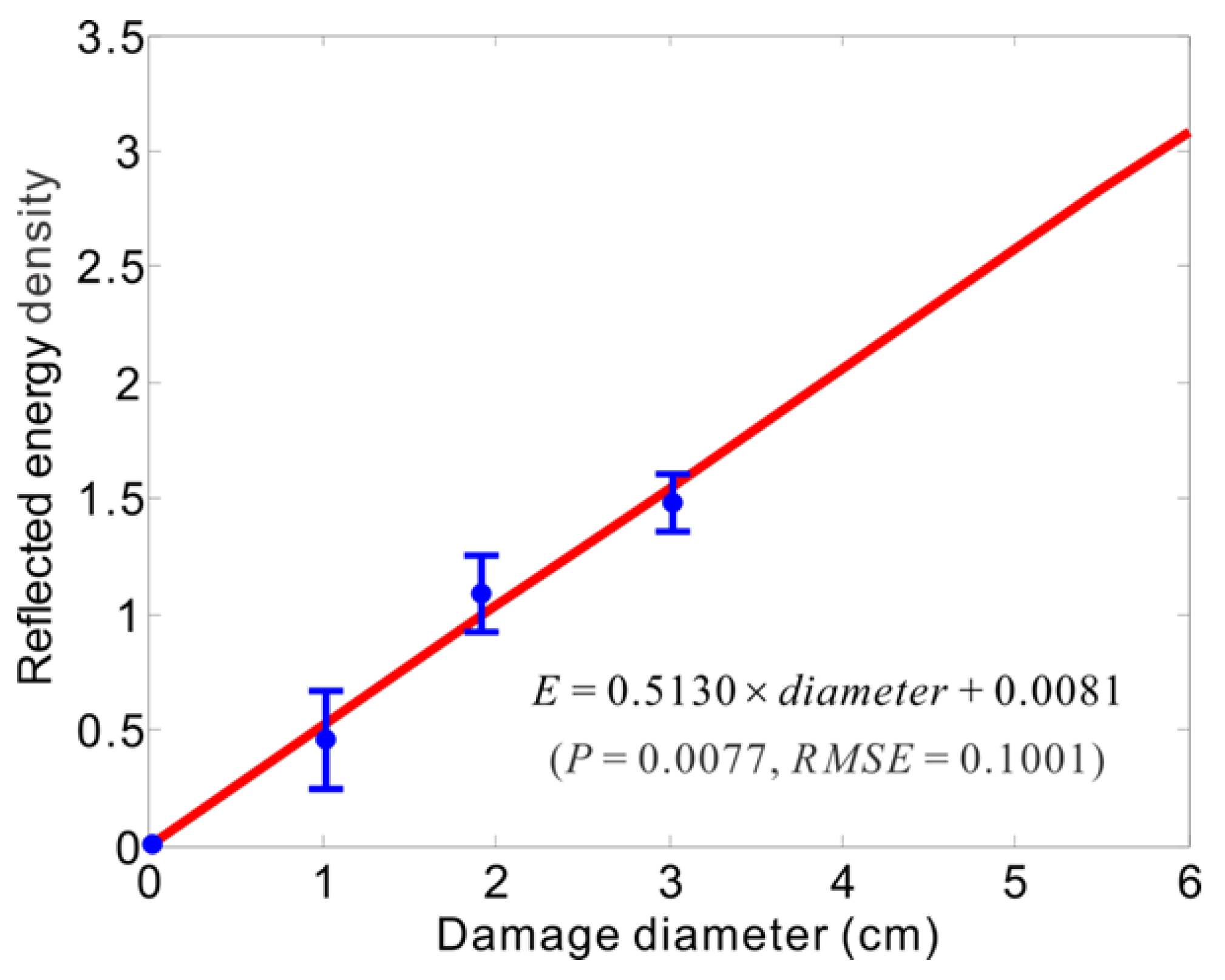
The energy density metric could not only quantify the extent of damage, but also map out the relationship between the released energy upon reflection due to damage and the defect growth through the corresponding energy time-frequency spectra from the sensor response data. Thus, in order to quantify the severity of any damage, a damage index parameter is introduced as a function of reflected energy in terms of the Hilbert time-frequency representation. The energy density is defined as a damage index parameter, which is expressed as Equation (9):
where
is called the Hilbert energy spectrum,
is the instantaneous amplitude resulting from the Hilbert transform. Since the amplitude and frequency of each decomposed signal with the FEEMD processing are both the functions of time, a three-dimensional time-frequency space
can be produced. Then taking advantage of the characteristic of the three dimensional time-frequency spectrum, the instantaneous amplitude can be converted into the expression of energy to interpret any change of the propagating wave due to possible existed damage in the time-frequency spectrum. As Equation (9) shows, the transported energy is directly proportional to the square of the amplitude of the wave. Therefore, the energy density can be defined and represented in the Hilbert time-frequency spectrum. To reveal the EDM’s capability of multiple damage quantification and evaluation, the estimation results obtained by the energy density metric is illustrated in
Section 4.2. The analysis of any damaged structure becomes facilitated by using the high-definition energy density spectrum. The reflection from damage is intuitively visible without any data pre-processing, which is indicated in
Section 4.1.
Energy Time-Phase Shift Metric (ETPSM)
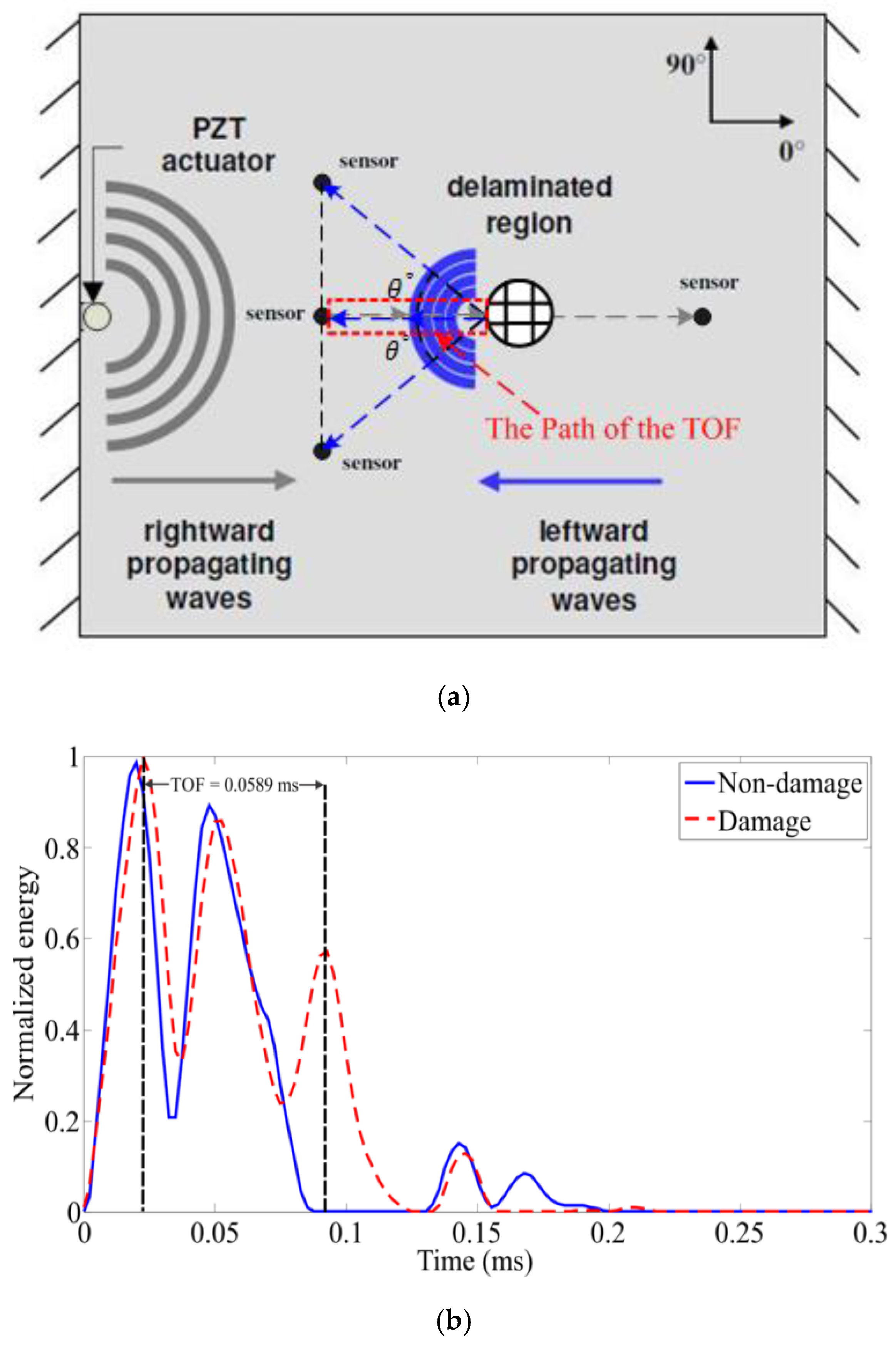
In most damage detection schemes, the time of flight (TOF) is an important damage index parameter used often. The time of flight between the actuator and sensor on a structure is directly dependent on the layup structure of the composites, the properties of the standing (actuation) wave and the materials of the composites, which have been mentioned in
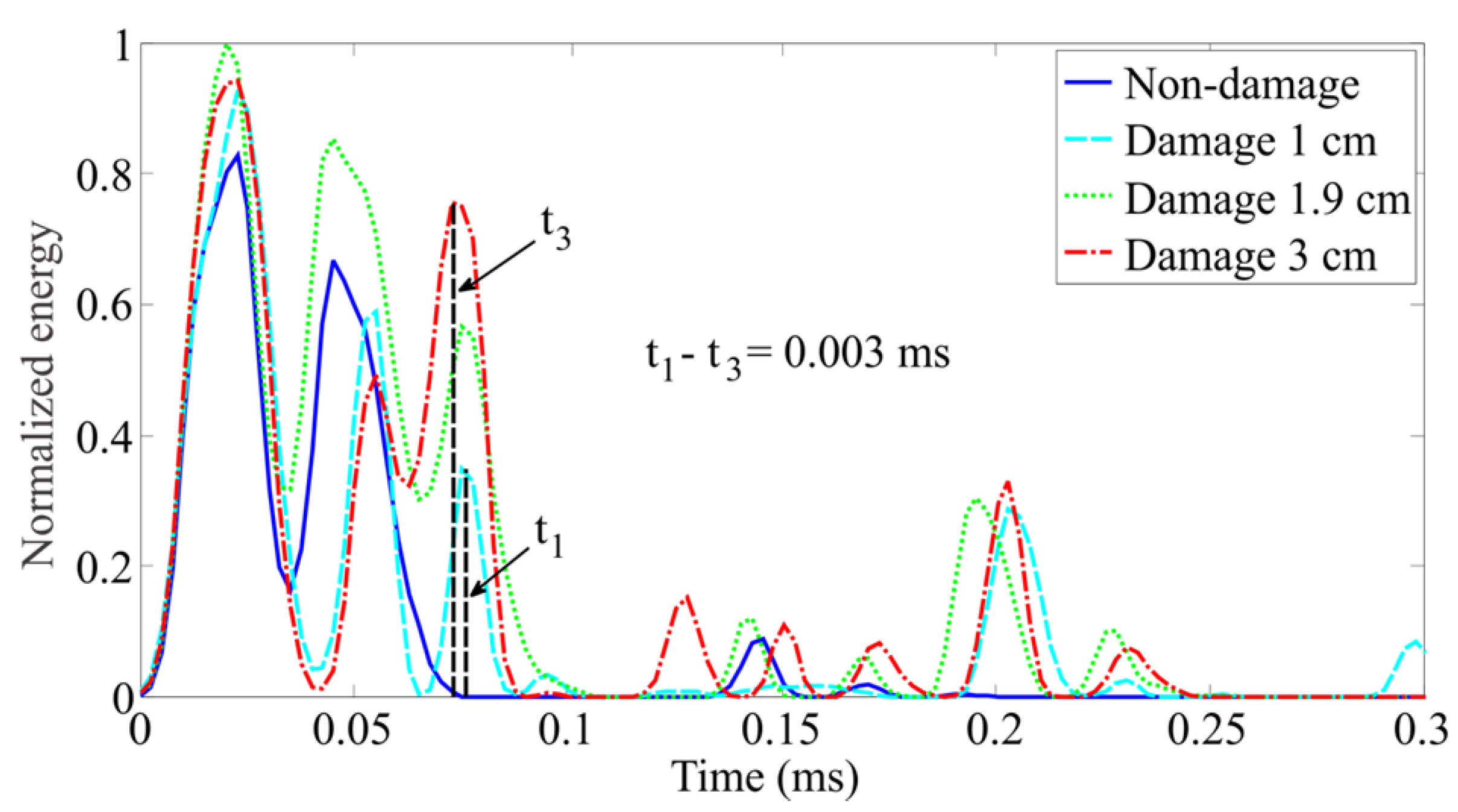
Section 2.1. Here, the TOF is defined as the time duration taken from the energy peak of an actuation sensing wave to the energy peak of a reflected wave due to a damage, which is measured by a sensor. A demonstration of the TOF is illustrated in
Figure 3. However, in order to easily obtain accurate time information to serve for the TOF, a high-definition energy time spectrum was proposed and developed based on the Hilbert spectral analysis. In the energy time spectrum, the time resolution become therefore more demarcative so as to conveniently calculate out a precise time of flight demanded, and consequently to obtain a precise position of the structural discontinuity with the information of the wave propagation velocity.
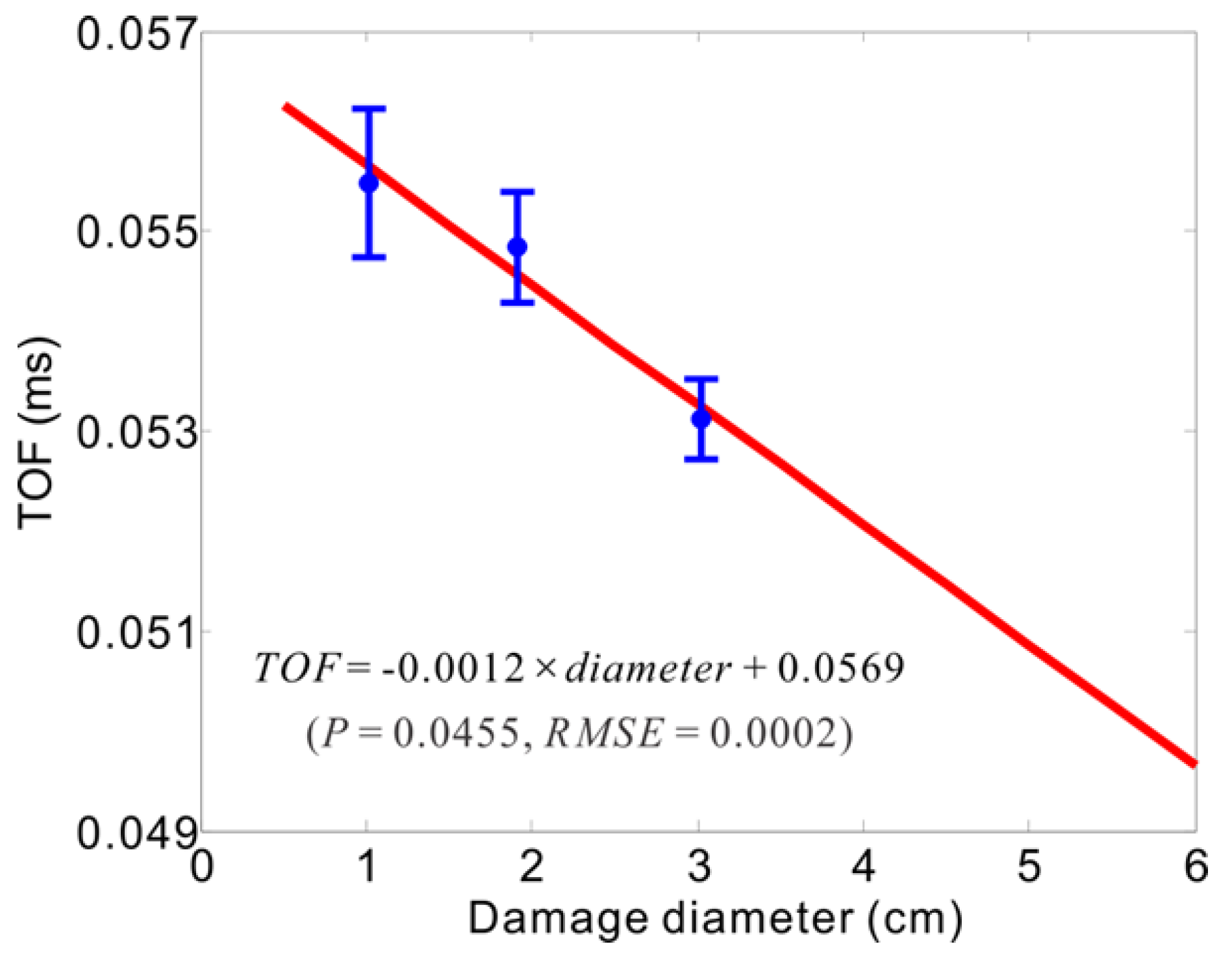
The energy time-phase shift metric is proposed to locate any possible damage with an accurate determination of the time of flight, and to trace the severities of multiple damage by the phase shifts between the reflected waveforms. When a propagating wave encounters any damage, a part of the incident wavefront is reflected back while the rest diffracts through the damaged region. Actually, for the reflection wave, it is generated at the beginning of the damage. In this case, suppose that there are multiple damage with different sizes in a structure; the wave reflection from a bigger damage would be engendered sooner than that of a smaller damage located at the same position. Nevertheless, the scattered wave due to the existed damage can also be used to focus on the time of delay; thereby the different times between damaged and undamaged conditions are found and used in order to locate the damage.
Therefore, the time of flight between an actuation waveform and a reflection waveform due to damage can be precisely extracted from an energy time spectrum provided by the FEEMD based Hilbert spectral analysis method. In the energy time spectrum obtained from the selected IMF components containing the highest energies, the peaks give the arrival times of interest for the waves. Hence, the locations of various damage can be determined through the basic formula (10), which is defined as the damage positioning function (DPF):
where
is the distance of any damage away from a specific sensor.
is the group velocity of a propagating path.
is the corresponding time of flight.
If the time resolution of an energy time spectrum obtained from the HSA-FEEMD processing is distinct enough to recognize the small fluctuations from the different times of flight corresponding to the diverse damage dimensions, then the estimation for the severities of progressive damage would be feasible. In other words, it would be possible to trace damage increasing even if the dimension of an initial damage is unknown.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











