
Developing a Penetrometer-Based Mapping System for Visualizing Silage Bulk Density from the Bunker Silo Face


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
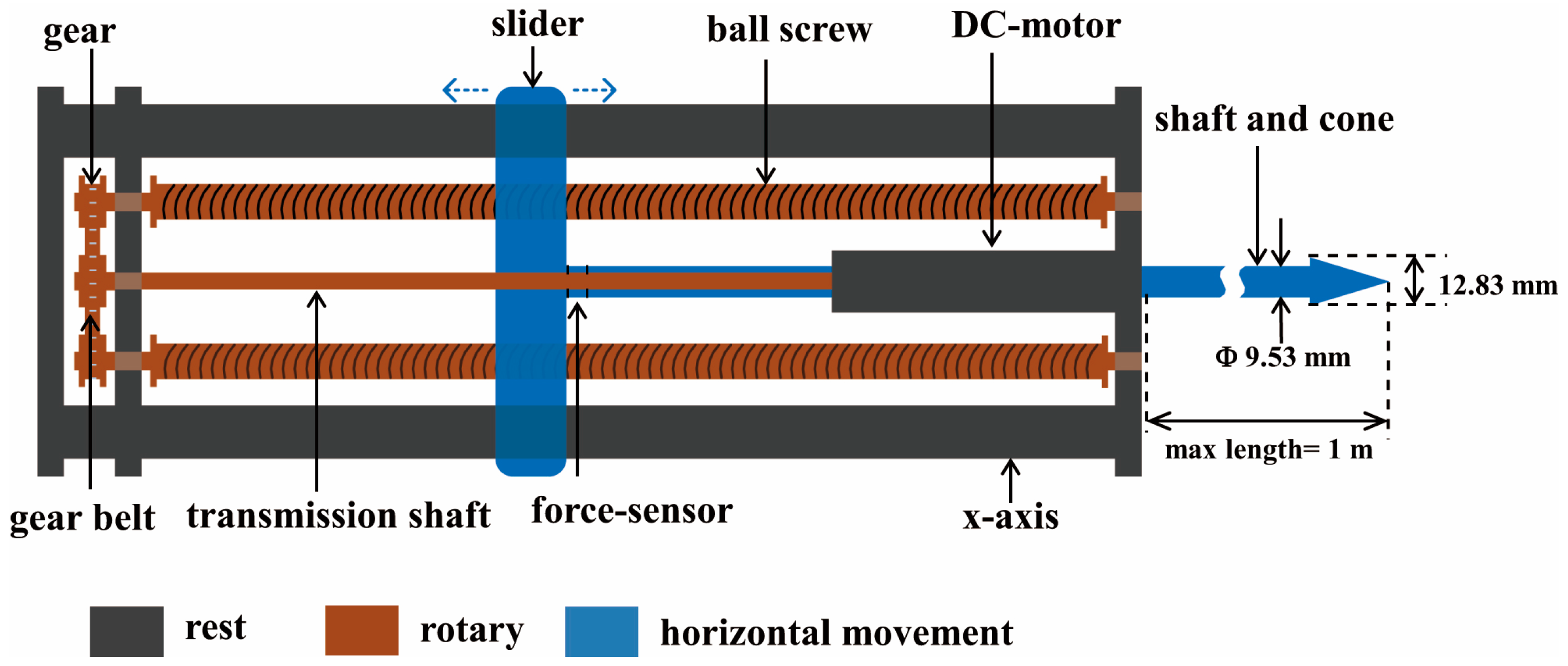
2.1. Penetrometer-Based Measurement Platform
2.2. Control Unit and LabVIEW-Based Interface
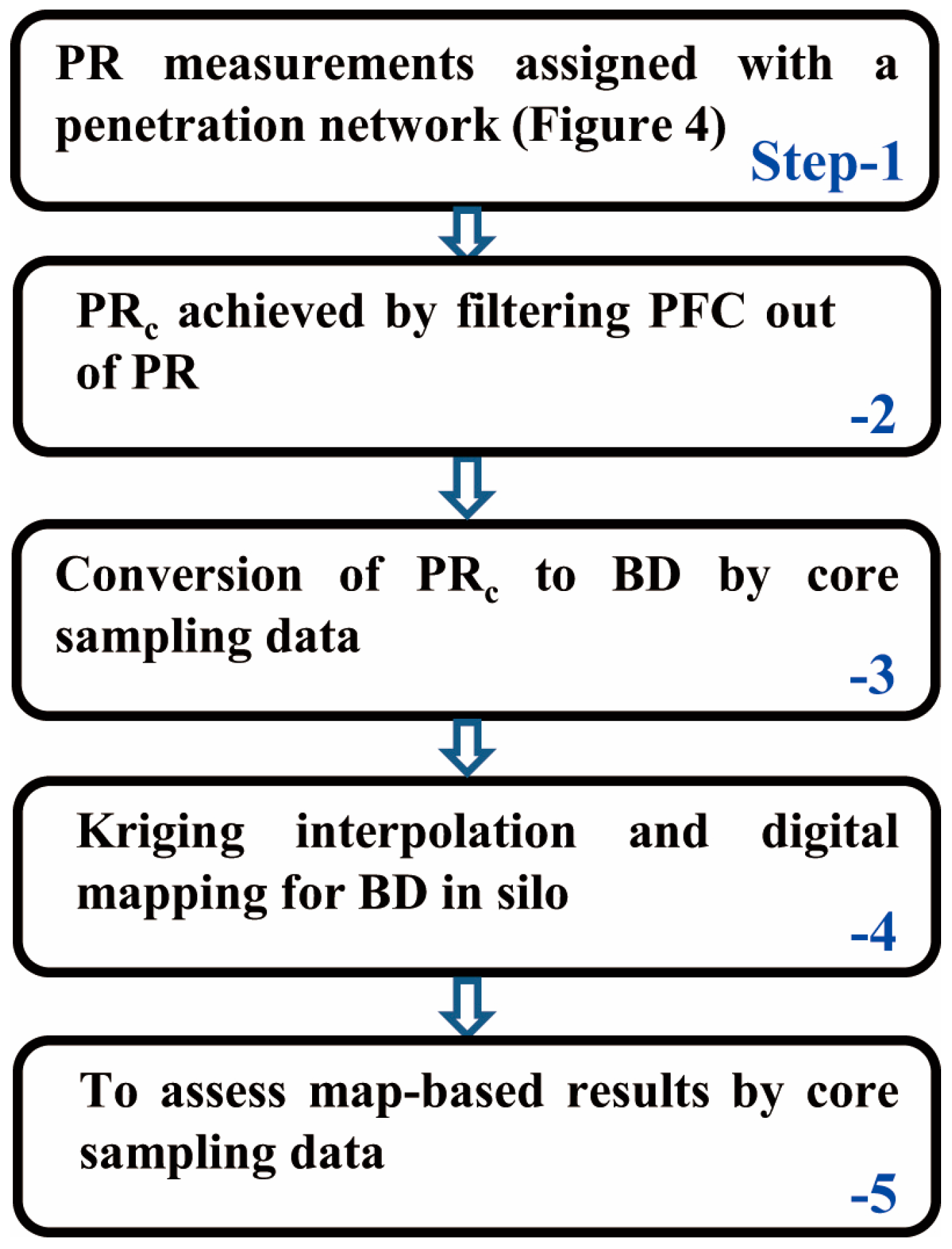
2.3. Data Processing Procedure
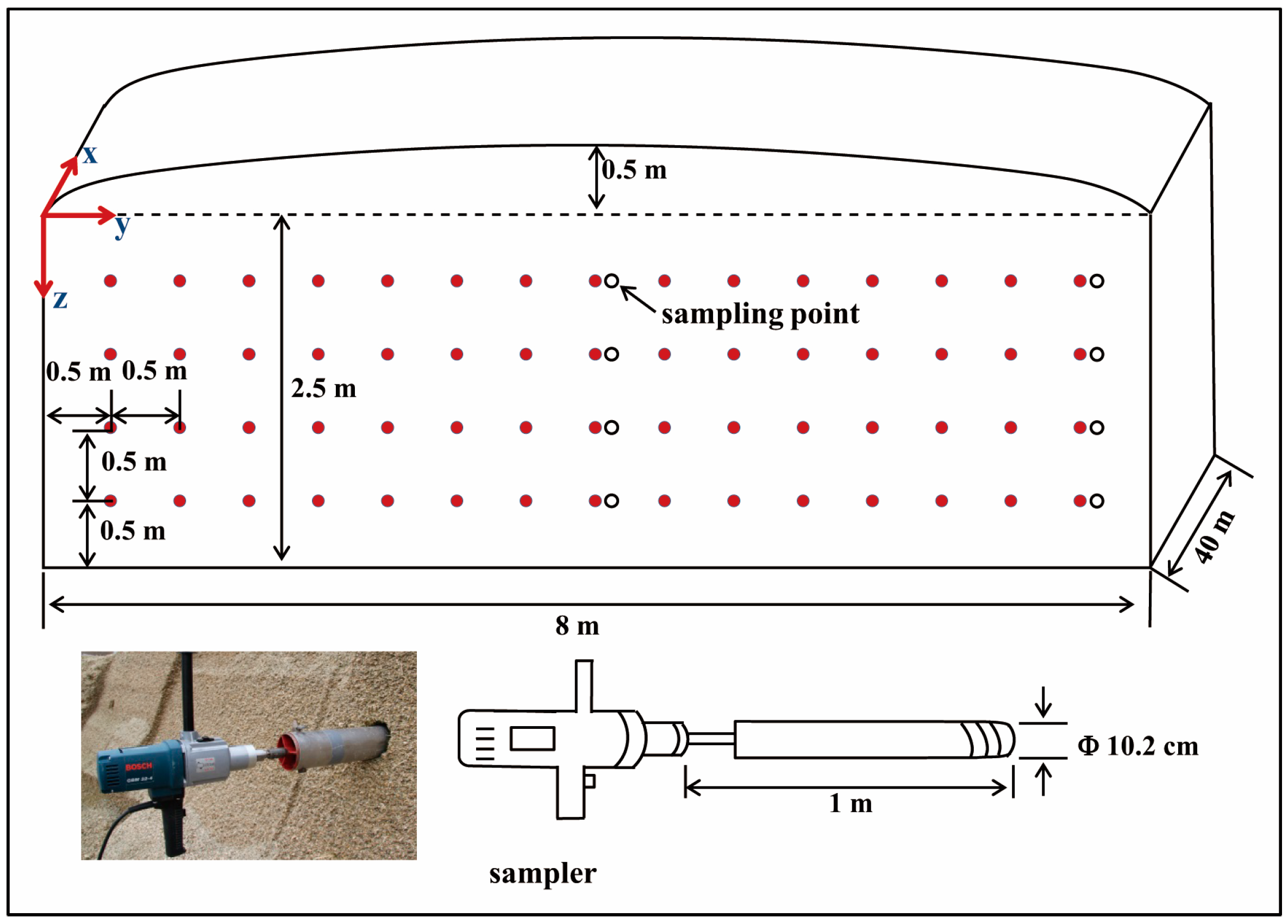
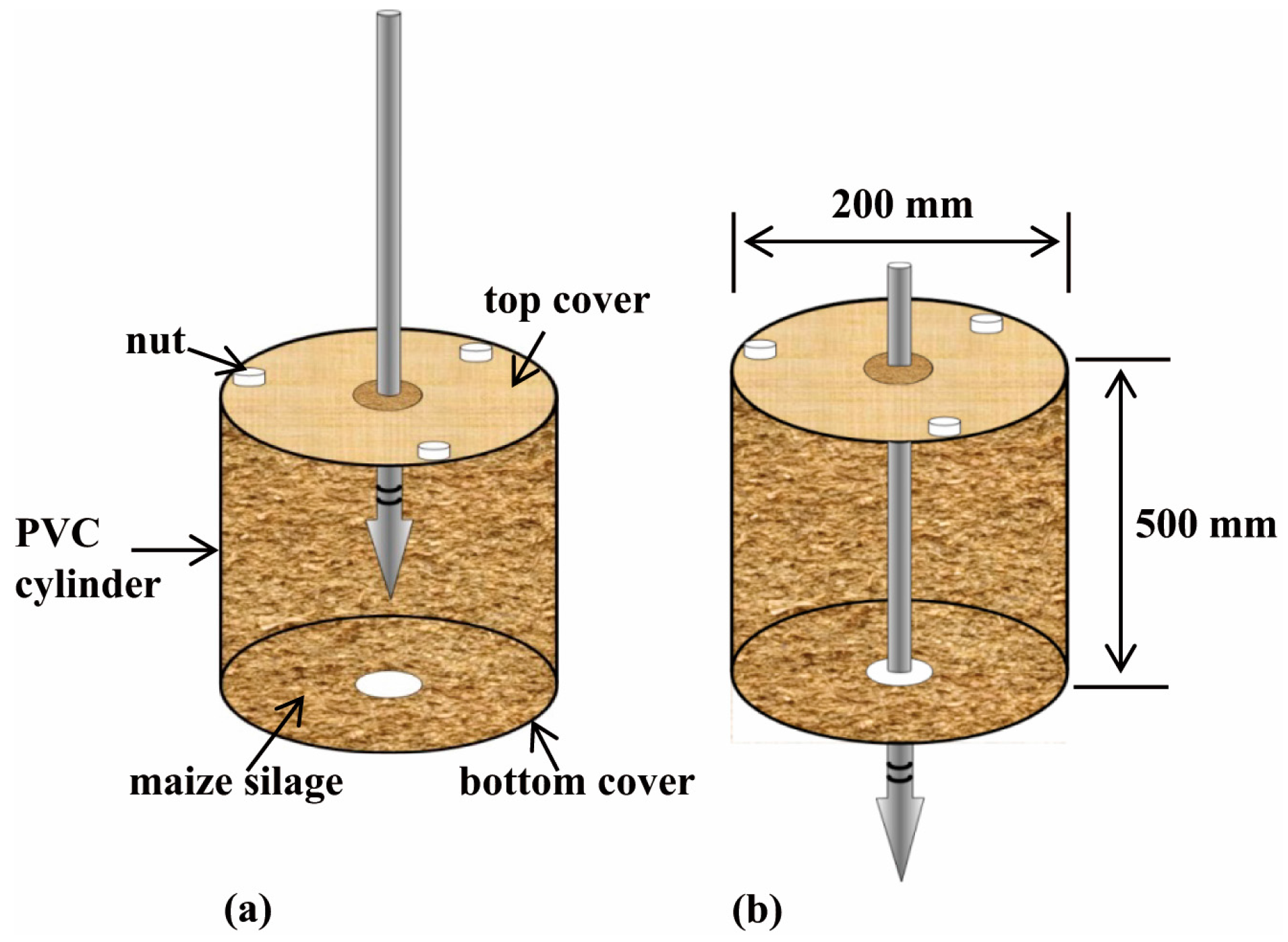
2.4. Experimental Condition
3. Results and Discussion
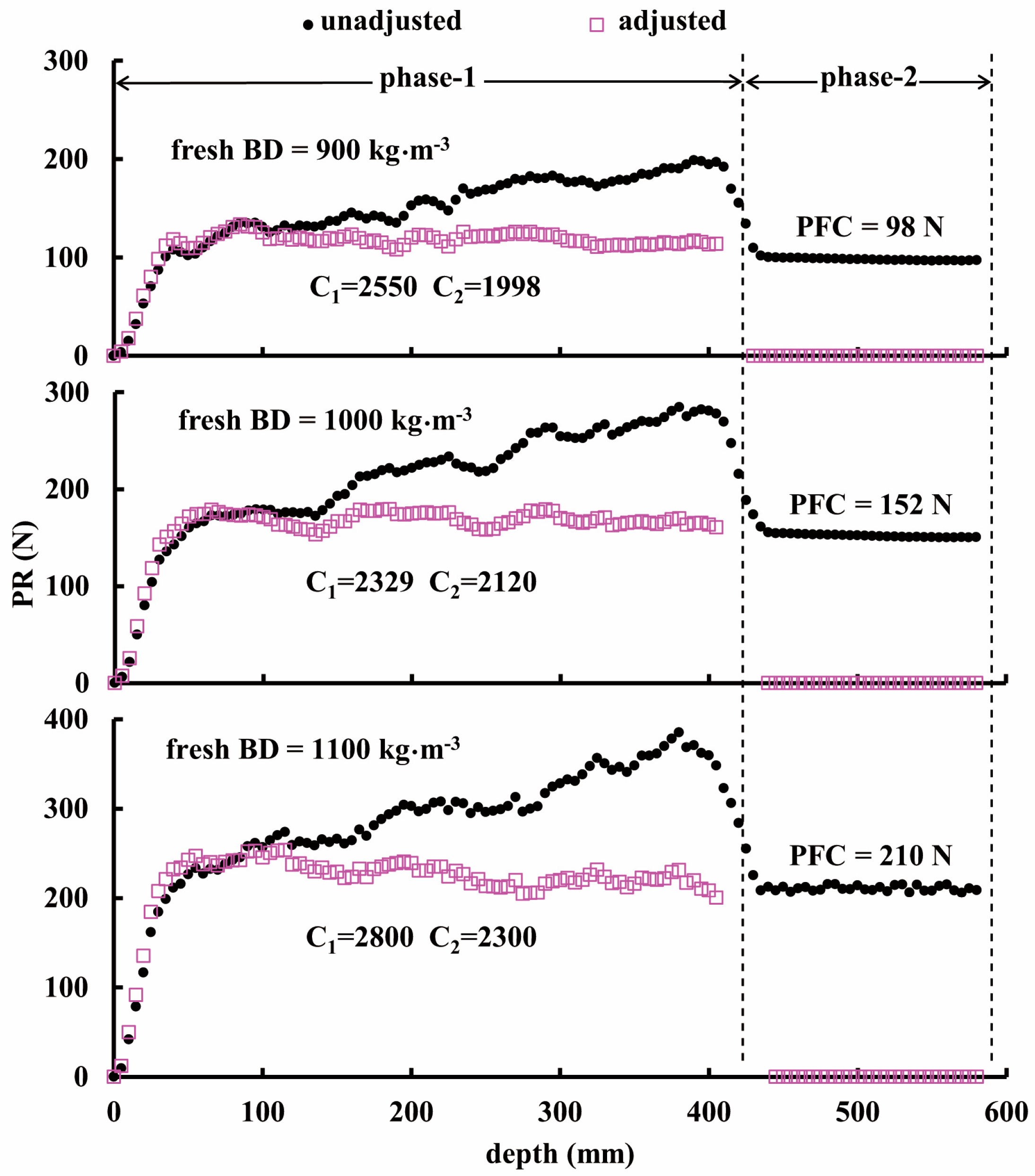
3.1. Filtering PFC from PR
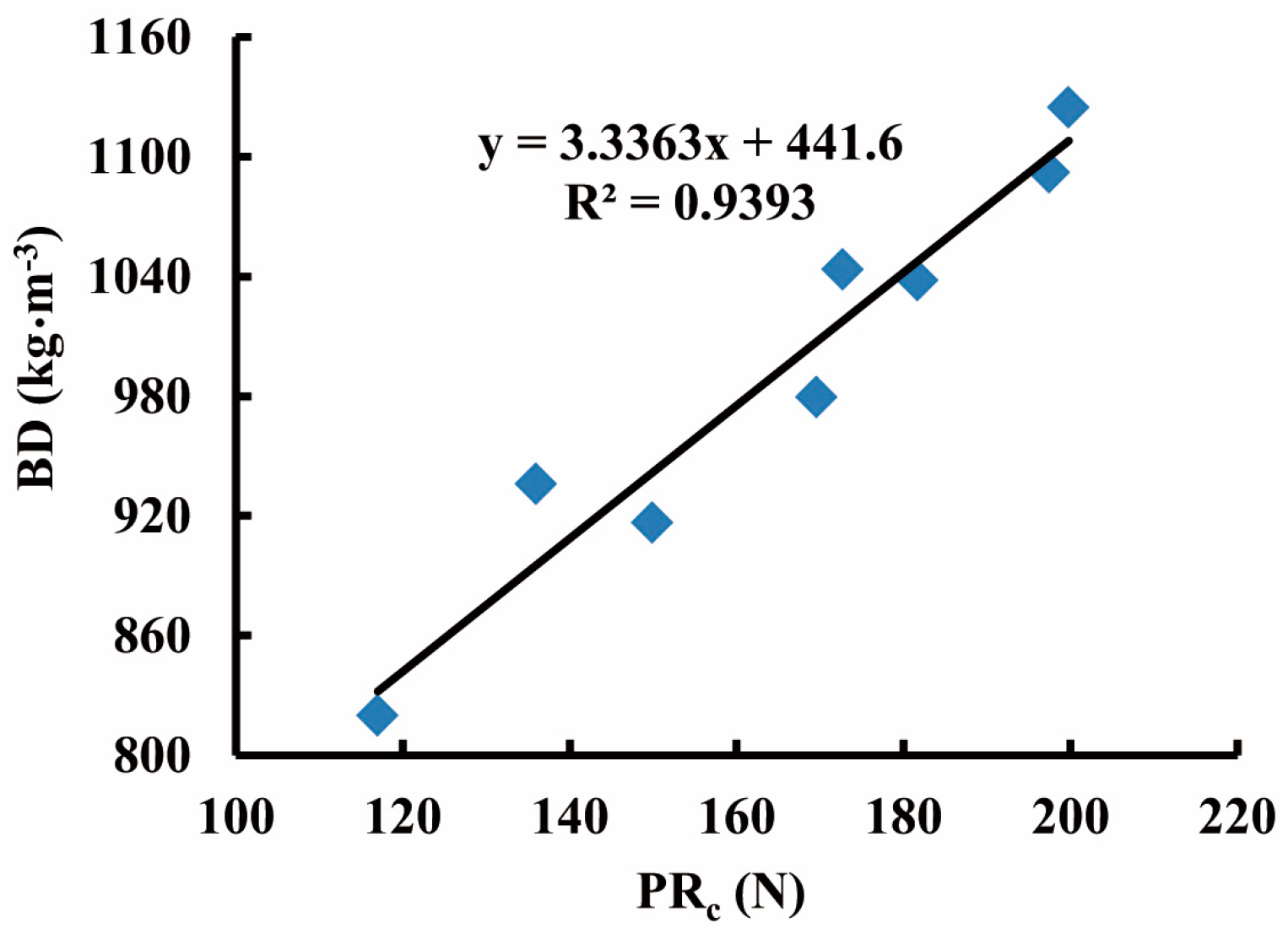
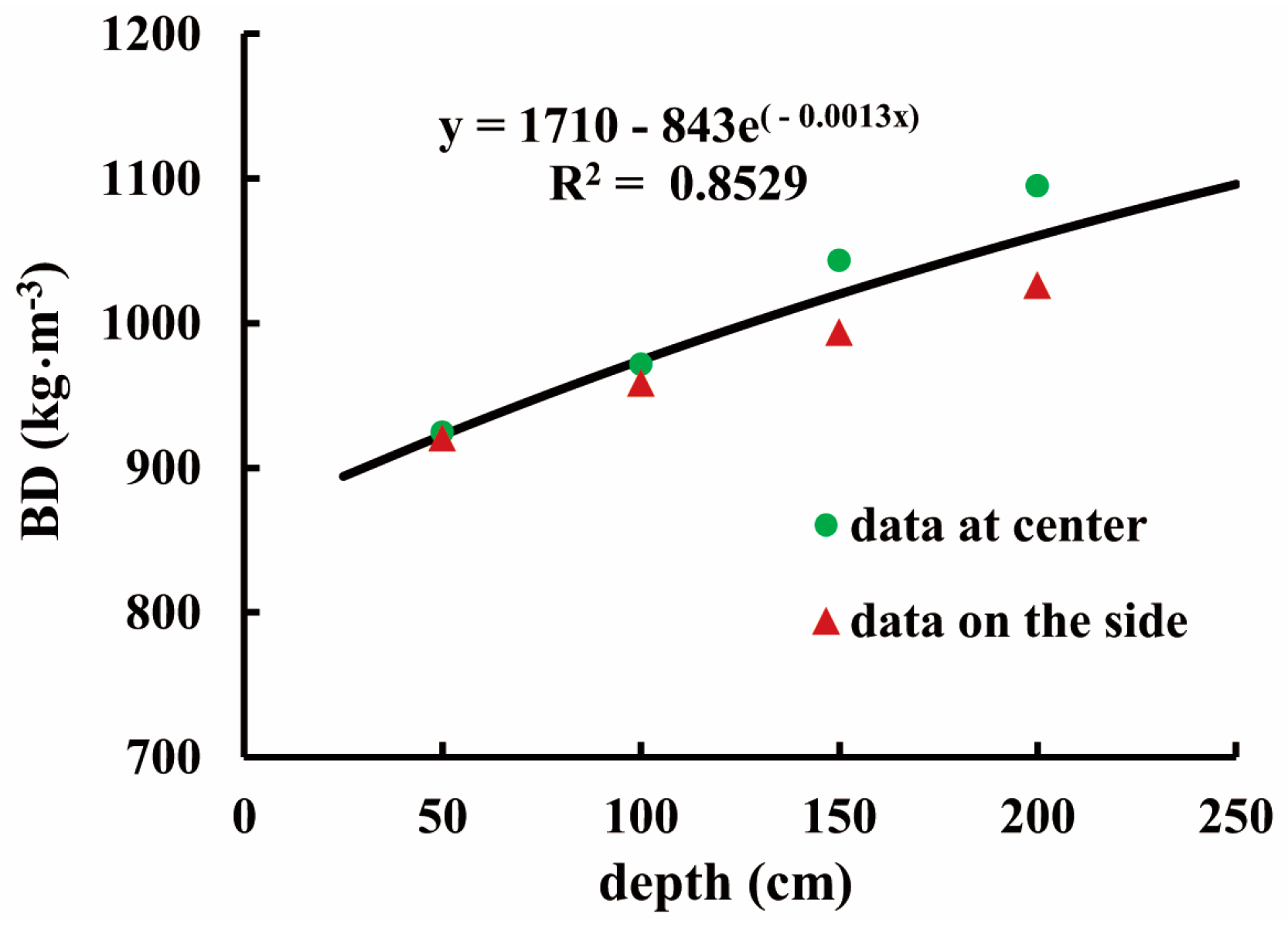
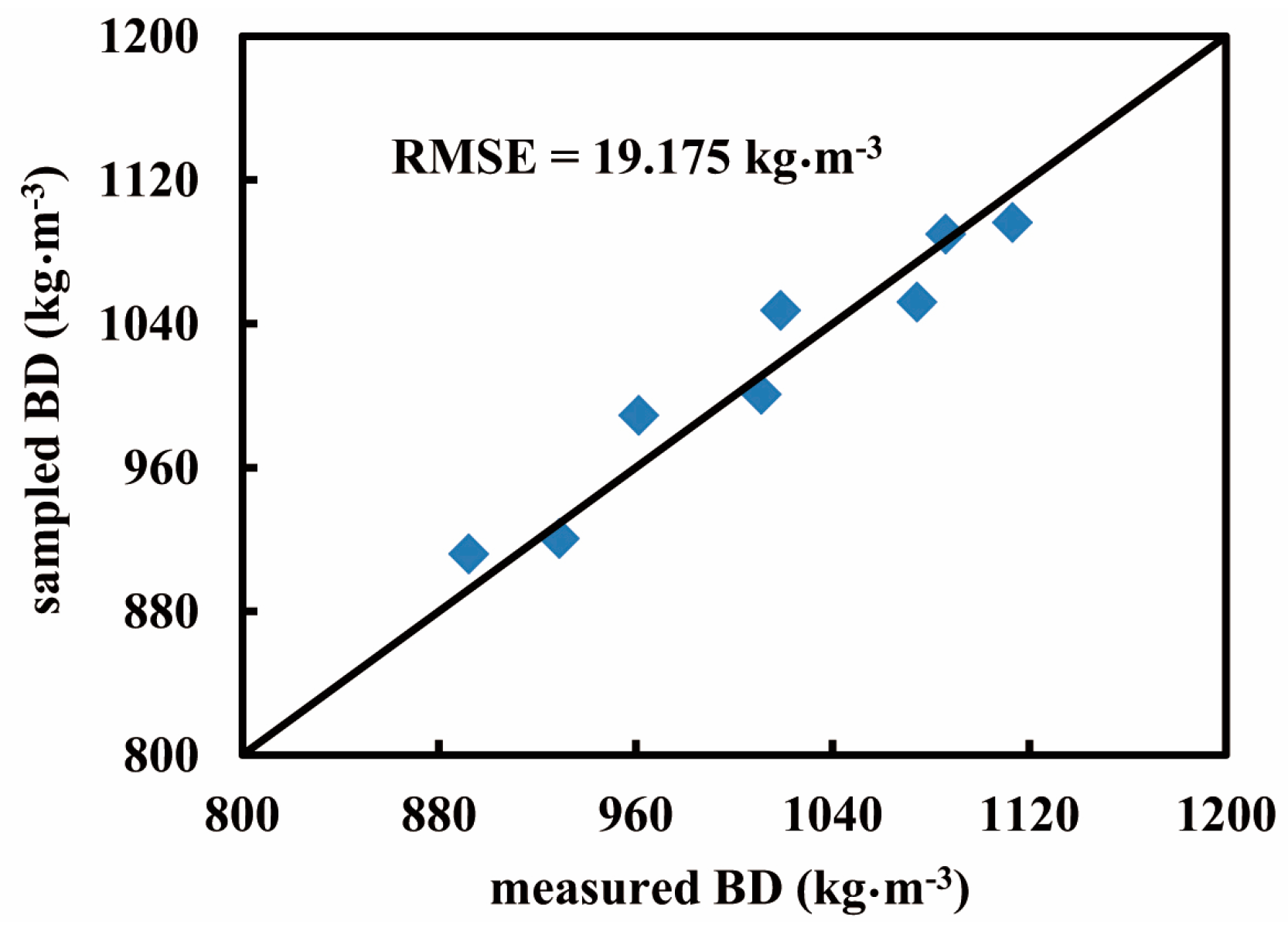
3.2. Equation for Transferring PRc to BD
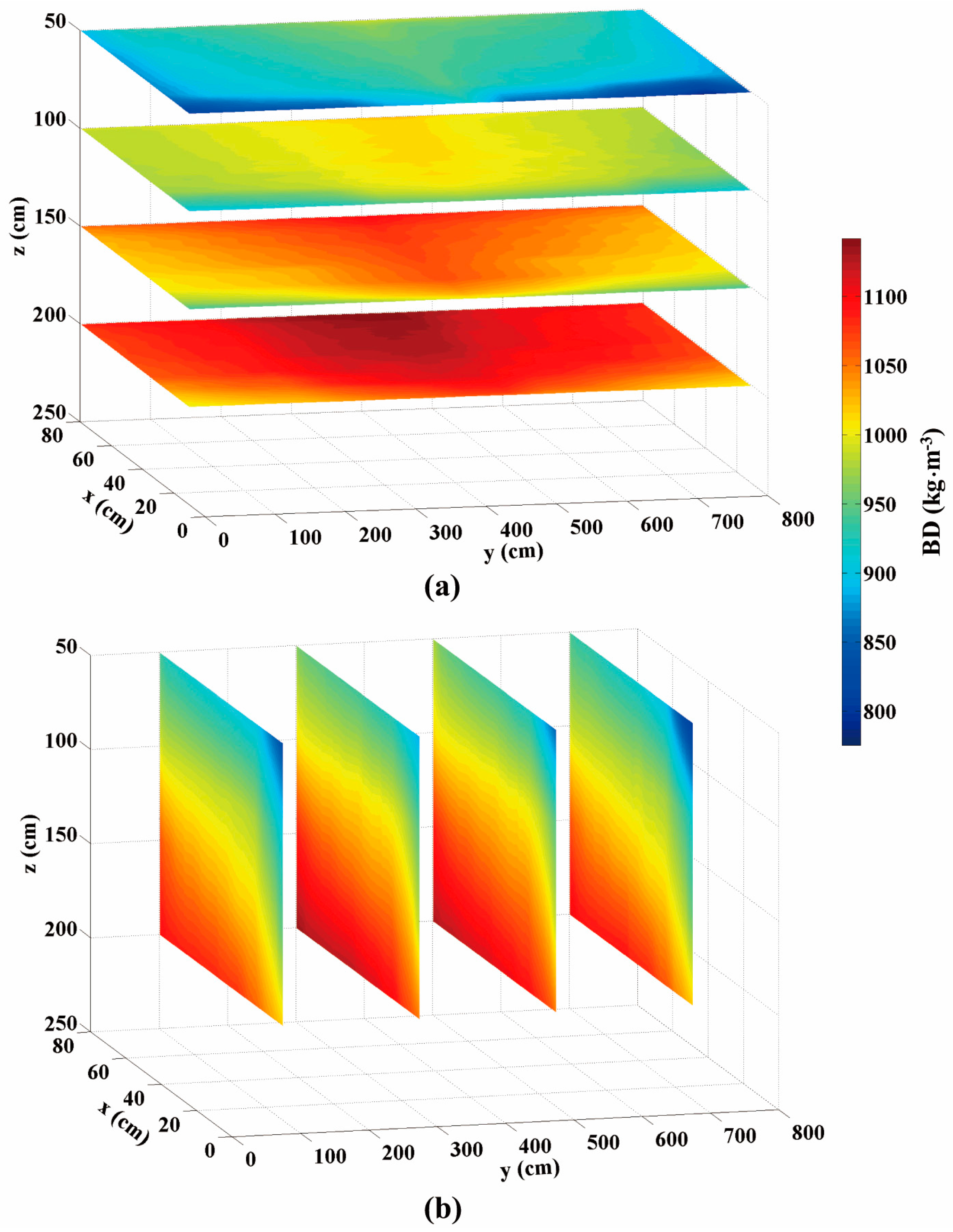
3.3. Mapping Silage BD in the Bunker Silo
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bodman, G.R.; Holmes, B.J. Managing and Designing Bunker and Trench Silos; AED 43. Midwest Plan Service: Ames, IA, USA, 1997. [Google Scholar]
- Savoie, P.; D’Amours, L. Density profile of herbage silage in bunker silos. Can. Biosyst. Eng. 2008, 50, 57–65. [Google Scholar]
- Wilkinson, J.M.; Daviest, D.R. The aerobic stability of silage: Key findings and recent development. Grass Forage Sci. 2012, 68, 1–19. [Google Scholar] [CrossRef]
- Pitt., R.E.; Muck, R.E. A diffusion model of aerobic deterioration at the exposed face of bunker silo. J. Agric. Engng. Res. 1993, 55, 11–26. [Google Scholar] [CrossRef]
- Muck, R.E.; Pitt, R.E. Aerobic deterioration in corn silage relative to silo face. T. ASAE 1994, 37, 735–743. [Google Scholar] [CrossRef]
- Wambacq, E.; Vanhoutte, I.; Audenaert, K.; De Gelder, L.; Haesaert, G. Occurrence, prevention and remediation of toxigenic fungi andcmycotoxins in silage: A review. J. Sci. Food Agric. 2016, 96, 2284–2302. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.R.; Buescher, W.; Lin, J.H.; Schulze Lammers, P.; Ross, F.; Maack, C.; Cheng, Q.; Sun, W. An improved penetrometer technique for determining bale density. Biosyst. Eng. 2010, 105, 273–277. [Google Scholar] [CrossRef]
- Muck, R.E.; Holmes, B.J. Factors affecting bunker silo densities. Appl. Eng. Agric. 2000, 16, 613–619. [Google Scholar] [CrossRef]
- Fuerll, C.; Schemel, H.; Koeppen, D. Principles for measuring density in silages. Landtechnik 2008, 63, 94–95. [Google Scholar]
- Mumme, M.; Katzameryer, J. Mobile test station for the radiometric measurement of density distribution in bales. Landtechnik 2008, 63, 341–343. [Google Scholar]
- Meng, F.J.; Sun, Y.R.; Buescher, W.; Maack, C.; Cheng, Q.; Berg, A.; Lin., J.H.; Ross, F.; Zhang, H. An extended penetrometer system for the map-based assessment of bale density distribution. Appl. Eng. Agric. 2012, 28, 449–455. [Google Scholar] [CrossRef]
- Perumpral, J.V. Cone penetrometer application—A review. Trans. ASAE 1987, 30, 939–944. [Google Scholar] [CrossRef]
- Herrick, J.E.; Jones, T.L. A dynamic cone penetrometer for measuring soil penetration resistance. Soil Sci. Soc. Am. J. 2002, 66, 1320–1324. [Google Scholar] [CrossRef]
- Sun, Y.R.; Lin, J.H.; Ma, D.K.; Zeng, Q.M.; Schulze Lammers, P. Measurement of penetration force using a Hall-current-sensor. Soil Till. Res. 2007, 92, 264–268. [Google Scholar] [CrossRef]
- ASABE Standards. Soil Cone Penetrometer. ASABE Standard S313.3; ASABE: St. Joseph, MI, USA.
- ASABE Standards. Procedures for Using and Reporting Data Obtained with Soil Cone Penetromenter. ASAE Standard EP542; ASABE: St. Joseph, MI, USA.
- ASABE Standards. Moisture Measurement–Forages, ASAE Standard S358.2. ASAE Standard 565; ASABE: St. Joseph, MI, USA.
- Sun, Y.R.; Meng, F.J.; Buescher, W.; Schulze Lammers, P.; Lin, J.H.; Ross, F.; Maack, C.; Cheng, Q. A study to identify and adjust friction-induced uncertainty of penetration measurement for agricultural materials. Measurement 2012, 45, 829–835. [Google Scholar] [CrossRef]
- Cai, X.; Sun, Y.R.; Schulze Lammers, P.; Buescher, W.; Maack, C.; Meng, F.J.; Lin, J.H.; Cheng, Q.; Zhang, H. Shaft friction of an ASABE standard soil cone penetrometer. Trans. ASABE 2013, 56, 839–846. [Google Scholar]
- D’Amours, L.; Savoie, P. Density profile of corn silage in bunker silos. Can. Biosyst. Eng. 2005, 47, 21–28. [Google Scholar]
- Muck, R.E.; Huhnke, R.L. Oxygen infiltration from horizontal silo unloading practices. Trans. ASAE 1995, 38, 23–31. [Google Scholar] [CrossRef]
- Ruxton, G.D.; Gibson, G.J. Self-compaction and aerobic deterioration of bunker silage: A simulation study. J. Agric. Eng. Res. 1994, 59, 189–193. [Google Scholar] [CrossRef]












© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Jungbluth, K.H.; Sun, Y.; Cheng, Q.; Maack, C.; Buescher, W.; Lin, J.; Zhou, H.; Wang, Z. Developing a Penetrometer-Based Mapping System for Visualizing Silage Bulk Density from the Bunker Silo Face. Sensors 2016, 16, 1038. https://doi.org/10.3390/s16071038
Li M, Jungbluth KH, Sun Y, Cheng Q, Maack C, Buescher W, Lin J, Zhou H, Wang Z. Developing a Penetrometer-Based Mapping System for Visualizing Silage Bulk Density from the Bunker Silo Face. Sensors. 2016; 16(7):1038. https://doi.org/10.3390/s16071038
Chicago/Turabian StyleLi, Menghua, Kerstin H. Jungbluth, Yurui Sun, Qiang Cheng, Christian Maack, Wolfgang Buescher, Jianhui Lin, Haiyang Zhou, and Zhongyi Wang. 2016. "Developing a Penetrometer-Based Mapping System for Visualizing Silage Bulk Density from the Bunker Silo Face" Sensors 16, no. 7: 1038. https://doi.org/10.3390/s16071038
APA StyleLi, M., Jungbluth, K. H., Sun, Y., Cheng, Q., Maack, C., Buescher, W., Lin, J., Zhou, H., & Wang, Z. (2016). Developing a Penetrometer-Based Mapping System for Visualizing Silage Bulk Density from the Bunker Silo Face. Sensors, 16(7), 1038. https://doi.org/10.3390/s16071038