2. Problems with the Standard Co-Registration Methods
There are multiple reasons causing the inapplicability of the standard co-registration method. The well-known reason is the decorrelation of image pairs, primarily caused by long normal baselines, or large deformation between two SAR images. Another reason is the big distortion between the master and slave images. It is known that the transformation relations between two images to be co-registered are usually nonlinear. Hence, the quadric polynomial function in Equation (1) is usually adopted to describe the geometric transformation relationship between the master and the slave images:
where
and
are the coordinates of the master and the slave, respectively, and
are the coefficients of the quadric polynomial function.
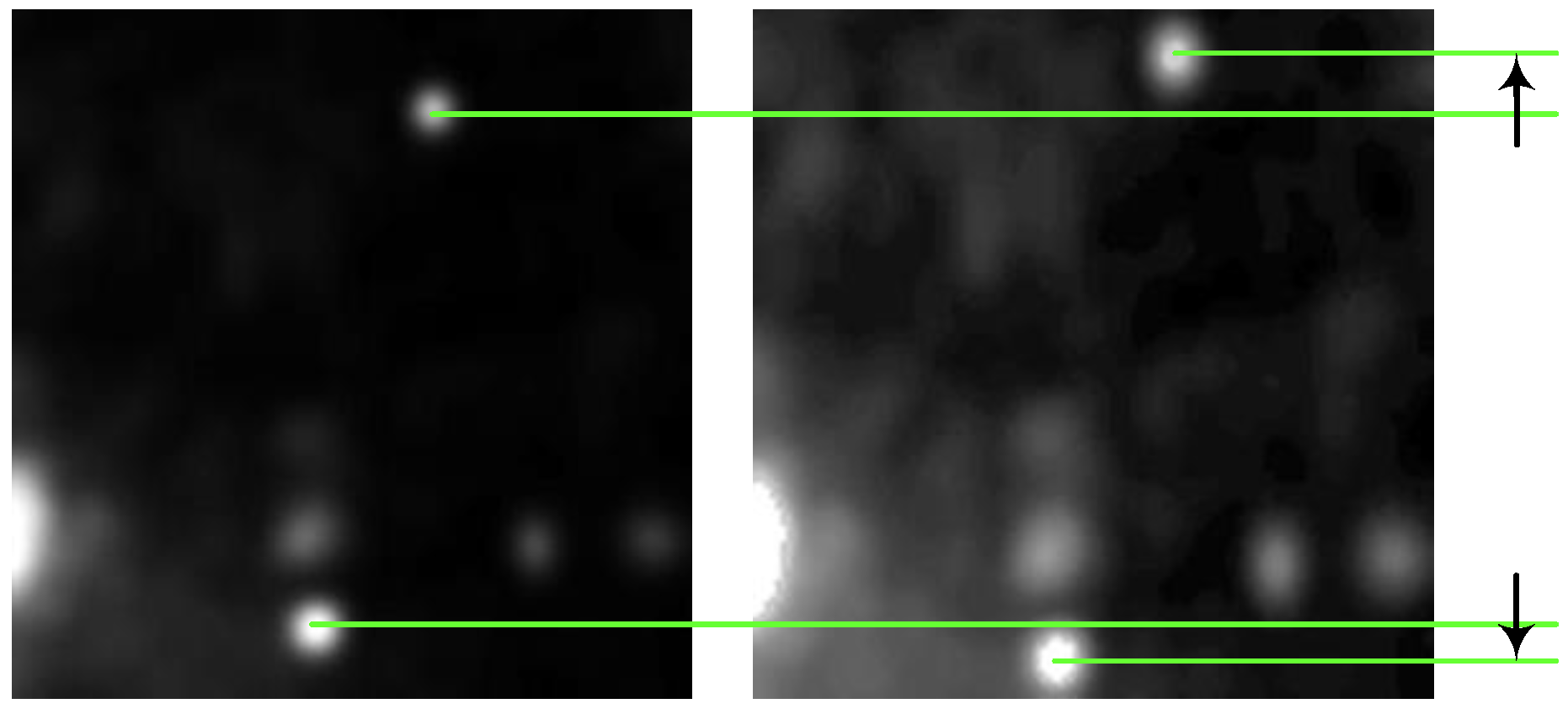
The standard method estimates the offsets using cross-correlation between image patches and determines the coefficients in Equation (1) by performing the least square adjustment processing to the offsets. It means that the method is based on the assumption that only a translational relationship exists between each pair of image patches when conducting co-registration. The standard method works when the size of image patches is relatively small (such as 64 × 64 and 128 × 128) and the influence of scale, flip, rotation, and shear (hereafter referred to as non-translation) is little. However, the assumption is unreasonable in some cases where the non-translation relation is too significant to be neglected, as is shown in
Figure 1. Because of the non-translation relationship, the image patches in
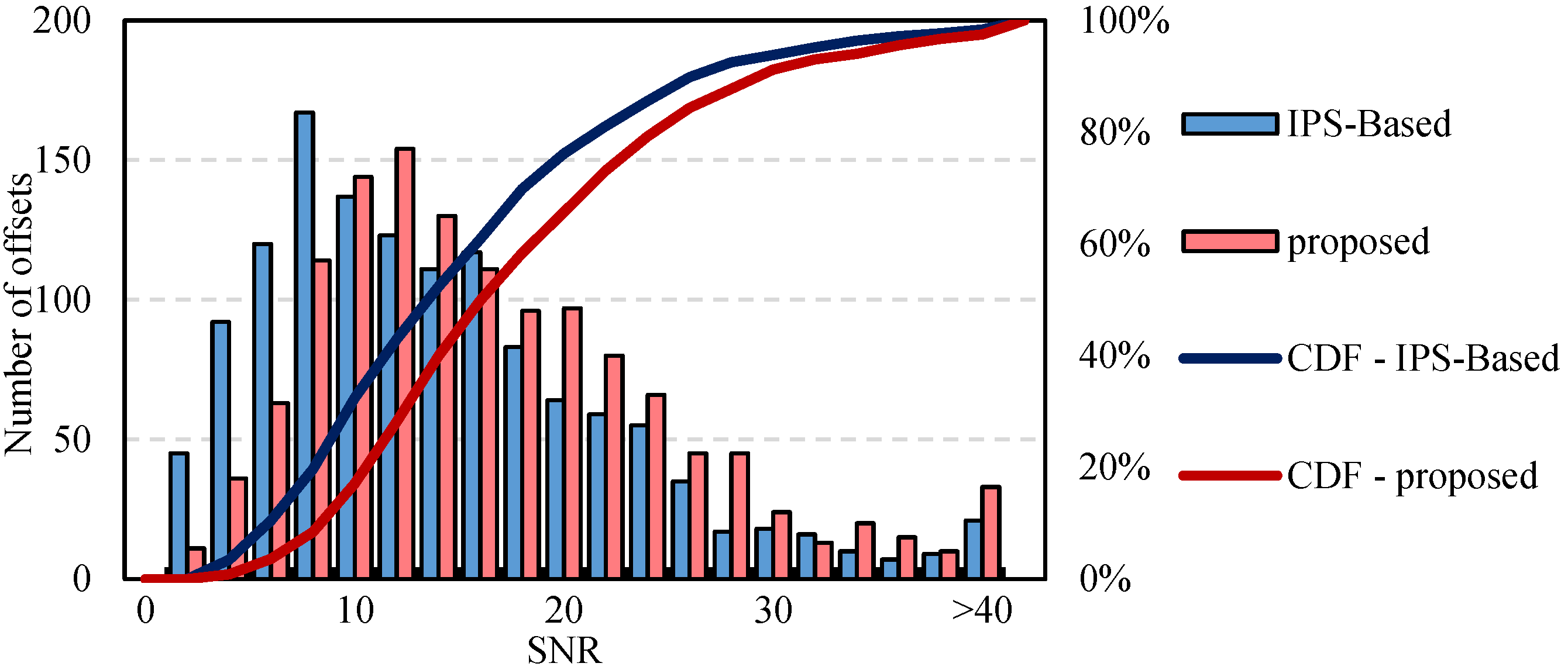
Figure 1 are unable to overlap each other no matter how we move them, making it hard to estimate an accurate offset. In addition, the signal-to-noise ratios (SNR) in this case will be significantly reduced.
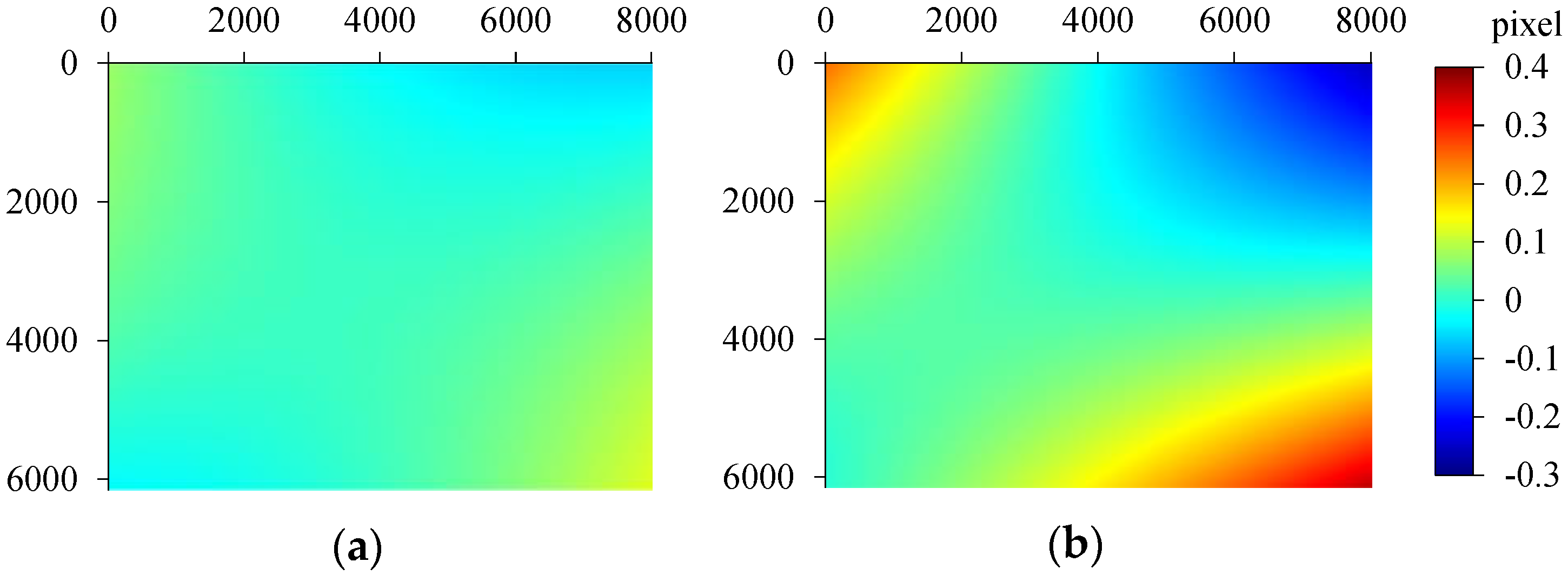
In azimuth, the large offset variations are usually introduced by big angles between orbits. For example, when the scaling rate between patches along the azimuth is 0.01 (it is almost equivalent to
in Equation (1)), the estimated uncertainty of the offsets in azimuth will be around 0.6 pixel with a 64 × 64 pixel patch. In range, disregarding the topography, the offset variations can be defined as:
where
is the offset in range,
is the coordinates in range,
is the normal baseline length,
and
are the slope distance and incidence angle corresponding to a pixel in the master, respectively, and
is the angle between normal baseline and horizontal plane. From Equation (2), we know that large offset variations in range are caused by a long baseline. For example, when the vertical baseline is 2000 m, the estimated uncertainty of the offsets in range will be about 0.2–0.3 pixel with the same 64 × 64 pixel patch.
Although we can reduce the patch size to suppress the non-translation between the patches, such an operation will decrease the accuracy of offset estimates as well. Bamler showed that the pixel-offset measuring accuracy of the patch can be determined by
where
is the number of correlation points of the patch,
is the coherence, and
is the oversampling factor [
7,
8].
According to Equation (3), too small patch size might lead to inaccurate offset estimates and small SNR values. Such paradox makes the design of a co-registration patch with an appropriate size a challenge when the intersection angle between the satellite orbits or the normal baseline is large.
In addition, as we know, the co-registration accuracy correlates with the patch size which is sometimes manually determined based on personal work experience. In addition, in some cases a satisfying patch size may need multiple pre-tests, greatly hindering the automation of co-registration.
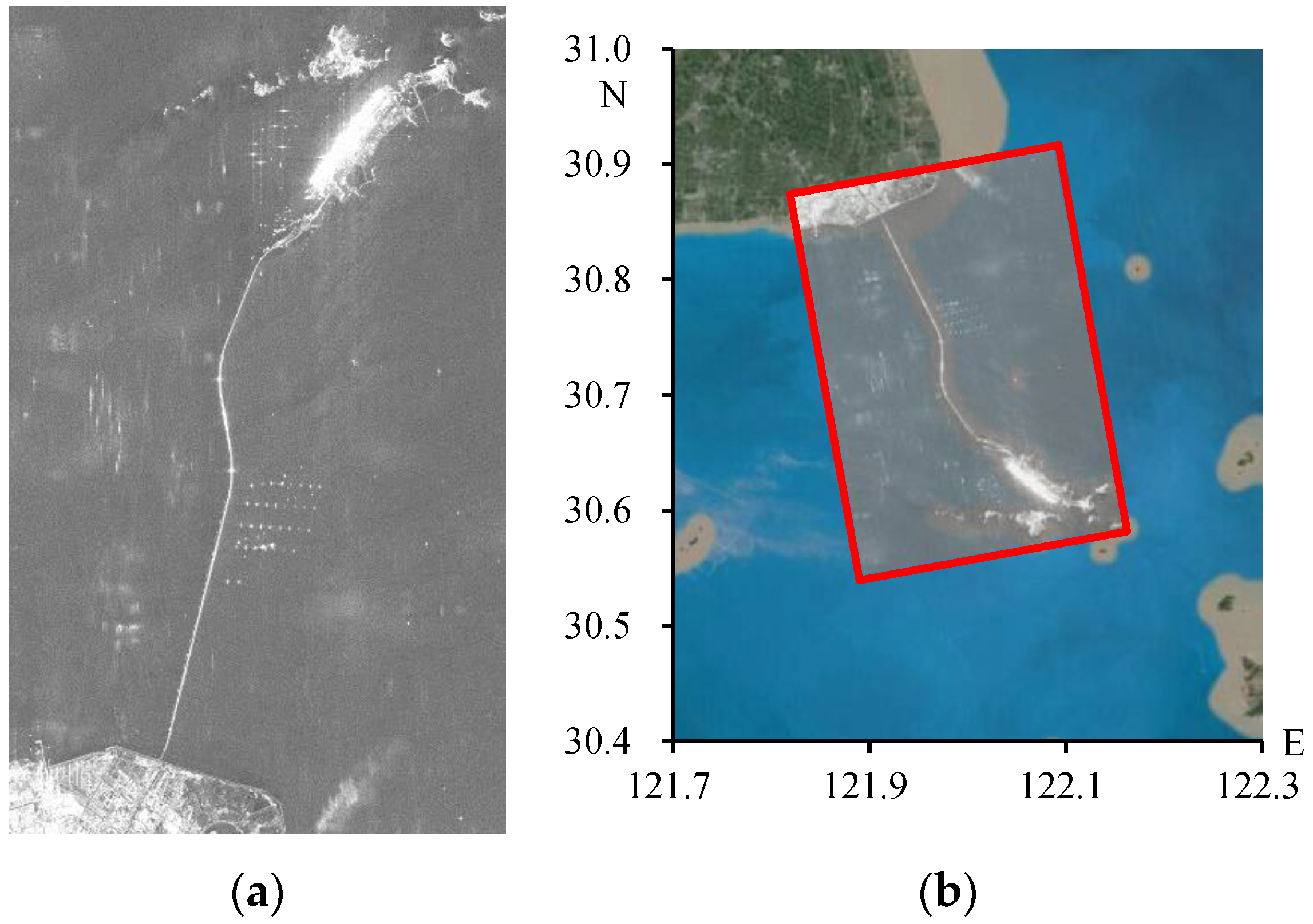
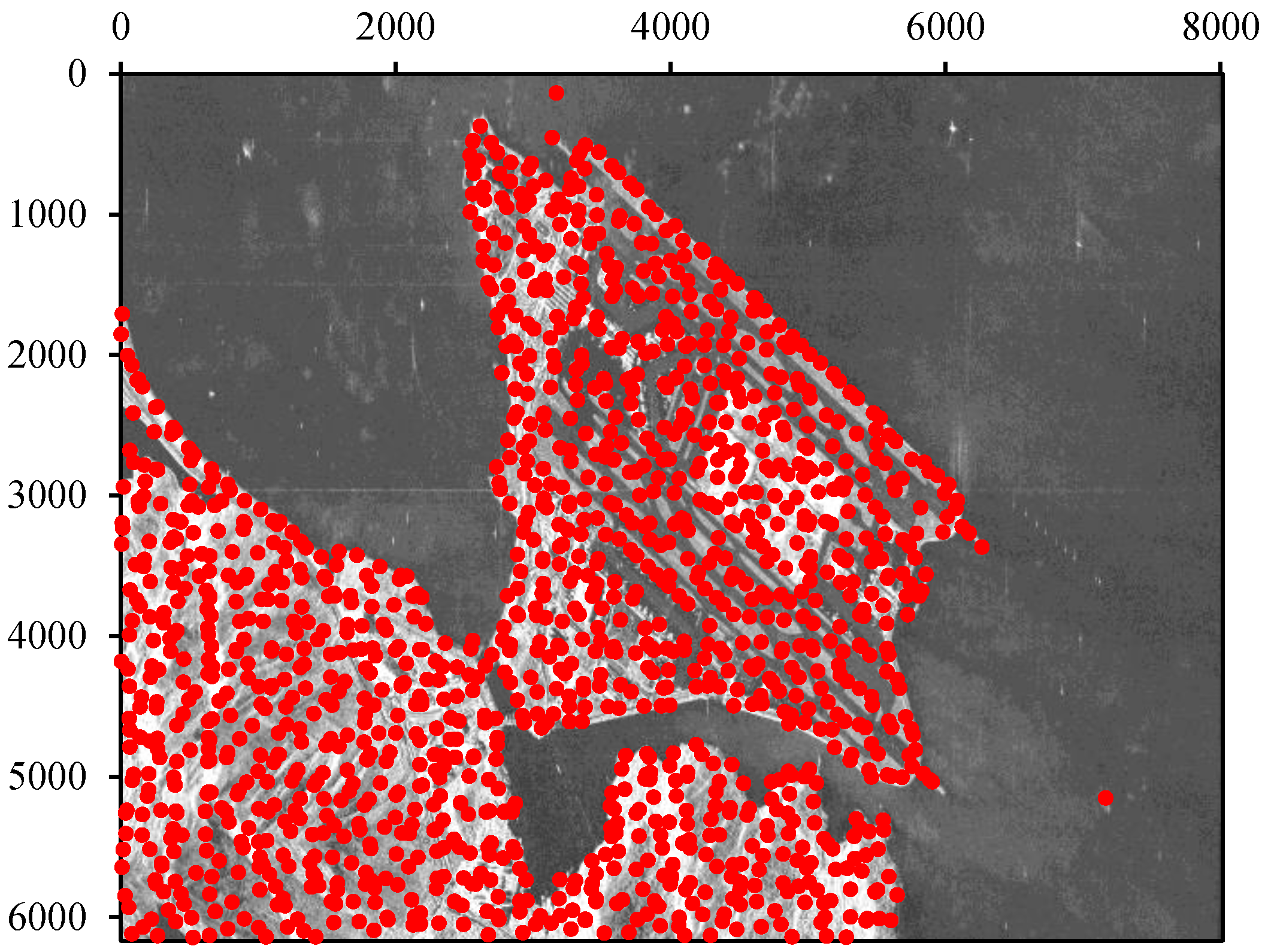
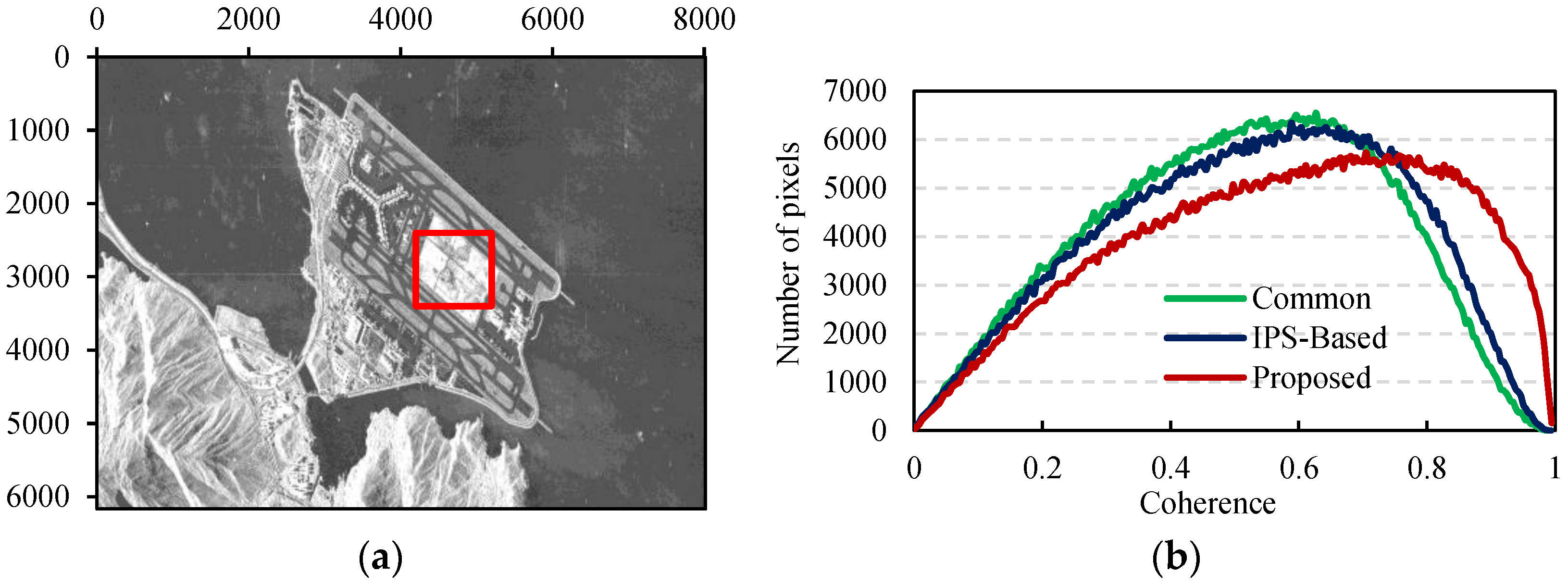
Moreover, it is not suitable to use uniformly distributed patches under some circumstances. Take the image in
Figure 2 for example, many targets in the image, like the large water area, completely lose coherence. The uniformly distributed patches cause unnecessary work. On the other hand, though most patches with low SNR can be removed by setting thresholds, the rest of the patches with incorrect offset measurements caused by the overestimation effect will significantly reduce the polynomial fitting accuracy [
9]. Therefore, how to automatically and reasonably select the effective co-registration area in advance is a problem.
Aiming at solving these problems, we proposed an improved strategy considering both geometrical features and image content. The strategy was tested using 2 TerraSAR-X data from the Hong Kong airport and 21 PALSAR data from the Donghai Bridge. Experimental results indicate that this method can overcome the co-registration difficulties caused by un-paralleling orbits, large normal baseline, and severe decorrelation of signals and effectively improve the co-registration accuracy.
3. Proposed Co-Registration Method
In the proposed co-registration method, both the geometric information and content features are considered to enhance the accuracy and applicability. Specifically speaking, the non-translational transformations between images are first eliminated, and then the pixel co-registration is performed. Finally, the registration points are automatically detected and optimized to further refine the co-registration polynomial.
Figure 3 visualizes the principle of the improved co-registration method proposed in the paper.
For the image pair with only coarse orbits, we first define some uniformly distributed points in the master scene, e.g., 8 × 8, and calculate their corresponding locations in the slave scene through the given orbital information. Then, the transformation relation of the master and slave is established by the least square adjustment in Equation (1). Generally, the orbital information and digital elevation model (DEM), if available, are utilized to calculate the space coordinates of each pixel in the master with the Range-Doppler (RD) model. Then, the corresponding image coordinates in the slave can be obtained by inverse computation, and the offset of each pixel in the master and the slave is calculated. Finally, the coefficients in Equation (1) are determined by a series of offsets. The polynomial can be used to eliminate most non-translation caused by big distortion between images in the subsequent steps. Even if the orbital parameters are not entirely accurate or the DEM is not available, the polynomial can reduce the negative influences brought by the non-translation in each patch. Because of the finite precision of orbital parameters, this step can only achieve an accuracy up to pixels. The main significance of the above work is twofold: (1) to provide favourable conditions for more accurate offset estimates in the successive sub-pixel co-registration process, and (2) to facilitate the automatic detection of registration points.
For image pairs with precise orbits, we calculate the offsets pixel by pixel according to the orbital information and related DEM information, and obtain the transformation relationship between images. In this case, the co-registration error is mainly induced by clock drifts of the SAR satellite, which is usually modelled as a constant shift [
10,
11]. In the following steps, the low-frequency system error will be removed with point targets [
12,
13].
After the geometric co-registration, it is essential to transform the slave scene into an approximate master geometry. In general, the 2-D sinc interpolation is adopted to perform resampling to the slave scene. Advantages of resampled slave scenes are twofold: One, is it can eliminate the non-translation between image pairs, which is beneficial to get higher SNR and more accurate offset estimates. The other is that it lays the basis for subsequent fast selection of co-registration areas. To enhance the computing efficiency, we store the slave scene in the random access memory (RAM) if the condition of hardware allows.
Though many existing software (such as GAMMA, DORIS, etc.) have employed orbital information to perform co-registration, their purpose is to achieve coarse co-registration, roughly determine the whole translation relations between images, and narrow the search areas for precise co-registration; the non-translation will still affect the precise co-registration. The proposed method eliminates the non-translation relations between images to a certain degree by using orbital parameters, thereby reducing the estimated offset ambiguity of the registration points.
The obtained polynomials are still unable to accurately represent the transformation relationship between the master and the slave. Instead, they show the relation of slave images before and after resampling, which is written as:
where
and
refer to the pixel coordinates of the original slave and the resampled slave,
is the function in Equation (1).
Then, the automatic detection of registration points is carried out. Serafino cross-correlated a 2-D sinc function template with the SAR image to detect the point targets [
14]. The points are detected by searching for local maxima from an ideal 2-D impulse response template and the 2-D cross-correlation surface calculated between oversampled SAR images. However, this method was applied to a single image and did not consider the coherence between images. Moreover, it is of low efficiency, and the detected points might be too densely distributed. Wang et al. detected the registration points from a temporal coherence map, which was roughly obtained from the observed coherence values by dividing them by the geometrical coherence [
15]. This strategy works well only when the temporal and normal baselines are small and the master and slave images have been relatively accurately co-registered. Hu et al. simply selected bright pixels using a certain threshold amplitude value [
16], which successively avoided incoherent areas (e.g., water bodies). In this paper, we combine the signal-to-clutter-ratio (SCR) and the amplitude information to detect the registration points. To lower the computational cost and reduce the influences of low geometric co-registration precision, the image pairs are firstly subsampled and their SCR are calculated. Then the point targets can be detected by taking pixels with SCR and amplitude values higher than certain thresholds. The automatic detection of the registration points can guarantee more reliable offset estimates for the subsequent co-registration, which makes the co-registration more effective and time-saving, especially for the cases similar to
Figure 2. Such operation can avoid major unnecessary computation and greatly improve the efficiency of co-registration.
To avoid points concentration in certain areas (such as cities), detected points are thinned in advance. This means only points with maximum SCR in the areas are reserved. Then the offsets in both the azimuth and range are estimated by cross-correlating pixel patches centred on the rest points. Eliminating non-translation effects in the patches in former steps helps the co-registration. Firstly, a higher SNR and more accurate positions of peak values can be achieved when calculating cross-correlation. Secondly, patches with larger sizes are acceptable while the coherence between images is relatively low. Thirdly, the patch sizes can be automatically assigned by programs without manual work or repetitive tests.
As for images with coarse orbital parameters, the obtained offset estimates are used to fit the coefficients of polynomials in Equation (1), and thus, the accurate transformation relationship between the master and slave can be constructed. In terms of images with precise orbits, the offset estimates are utilized to correct the zero term coefficients
and
in the polynomial. Since the errors of clock drifts in azimuth and range of those data during the geometric co-registration are mainly modelled as a constant shift [
10,
17], not all the coefficients must be calculated. Precise orbits ensure enough accurate co-registration results. For example, an orbit error of 10 cm only introduces a co-registration error of 1/200 pixel [
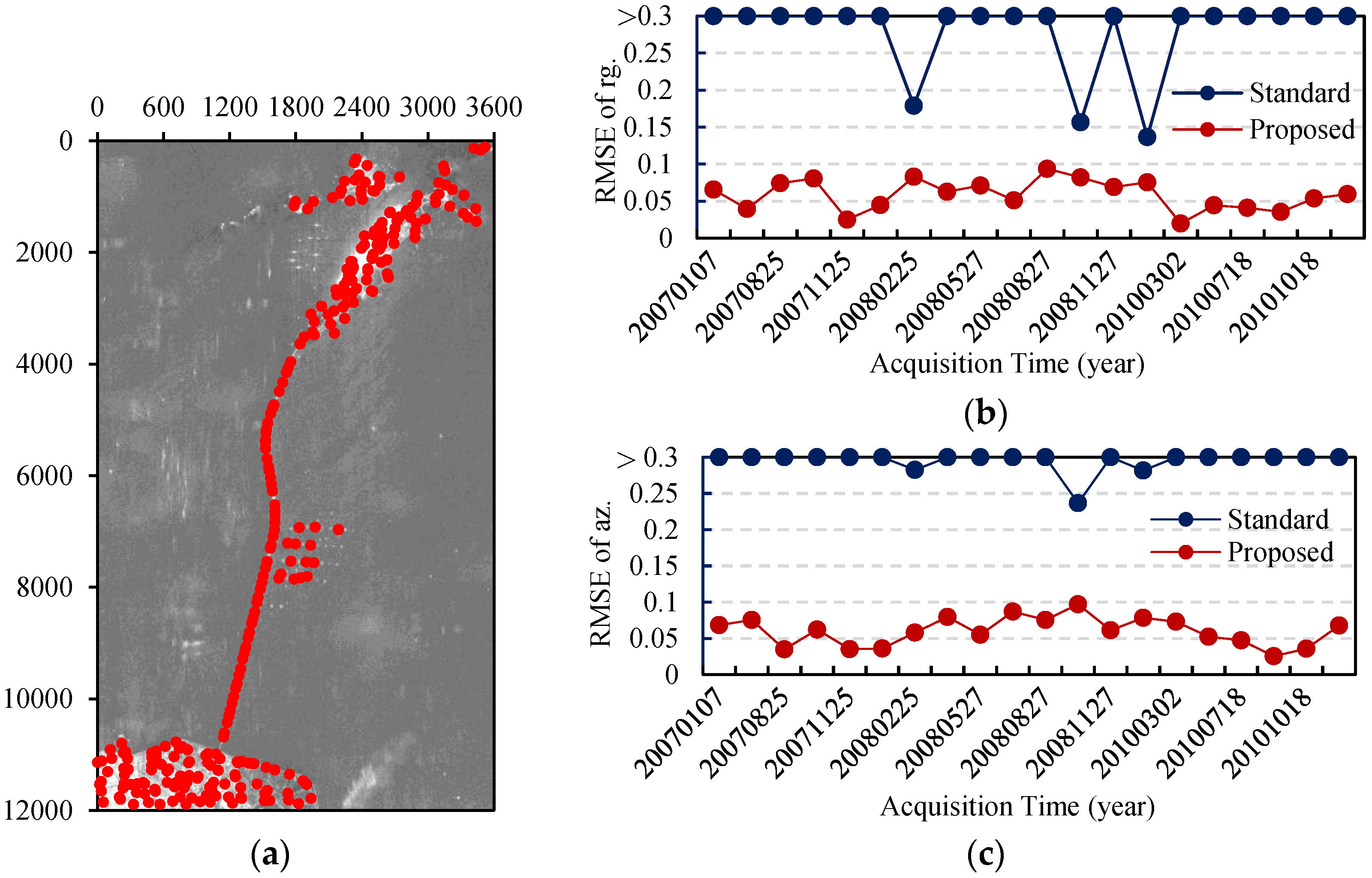
18]. Furthermore, precise orbits contain information of all pixels when conducting geometric co-registration, which makes the non-zero term coefficients more reliable than those corrected by scattered registration points in most cases. Sometimes whether the errors of clock drifts are modelled as a constant shift or not can also be determined by root mean square error (RMSE) when fitting
and
, and the RMSE should be as small as <0.08 pixel. Otherwise, the previous polynomial should be modified by a linear transformation equation fitted with the offset estimates, or you should perform the same co-registration way as that of the coarse orbital data.
After accurate co-registration, the transformation relationship between master and the first resampled slave is established by simulating Equation (4). The relation can be denoted as:
where
and
refer to the pixel coordinates of the master and the first resampled slave and
is the function in Equation (4). Combining Equations (4) and (5), the co-registration polynomial of the master and the slave is obtained as follows:
In addition, we can resample the slave image onto the grid of the master using Equation (6).
5. Conclusions
The standard co-registration method establishes a nonlinear geometric transformation model of the two SAR images with a series of offsets. As discussed in previous sections, this strategy does not work in some situations. On the one hand, significant non-translation relationships between images will be reflected in each patch with a centred registration point, resulting in great ambiguity in the offset estimates. On the other hand, images with abundant incoherent areas will introduce many errored offset estimates. These factors jointly lead to inaccurate image co-registration and reduce the computational efficiency. The basic reason is the standard method does not consider the geometrical features and content, therefore, its reliability and general applicability are affected. To get ideal results using the standard method, multiple tests and accuracy evaluations are usually performed by constantly changing the parameters, such as the size of the co-registration patch. Such a process reduces the automation degree and computation efficiency, and still cannot get satisfying co-registration results.
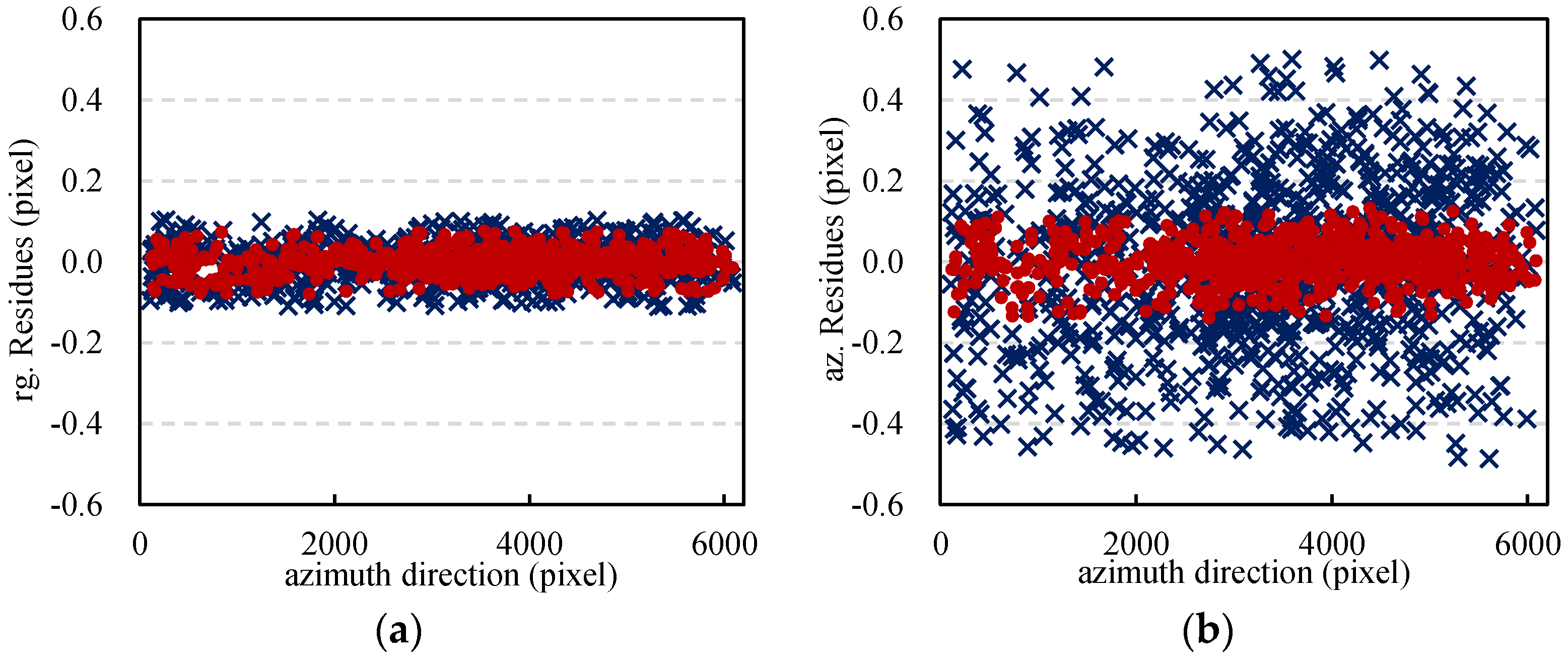
The main improvement of the proposed InSAR image co-registration method is that we take both the geometrical features and content of the SAR image pairs into consideration, which can be divided into two aspects specifically. (1) The elimination of non-translation. Though many existing methods have employed orbital information to perform co-registration, their objective was to achieve coarse co-registration, roughly determine the whole translation relationships between images, and narrow the search areas for precise co-registration, but the non-translation will still affect the precise co-registration. The proposed method eliminated the non-translation relations between images to a certain degree by using orbital parameters, thereby reducing the estimated offset ambiguity of the registration points. (2) The automatic location of effective co-registration areas. In this paper, the registration points are detected automatically by integrating the information of master and slave. The proposed method is capable of avoiding the decoherent areas effectively compared with the methods using uniformly distributed patches and locating the registration points more quickly and efficiently compared to the other point detection methods. Several experimental results showed that the proposed method can overcome the co-registration difficulties posed to the standard method and effectively improve the accuracy and efficiency of co-registration. In other words, the proposed method improves the reliability and applicability of co-registration. It also reduces the dependence on personal expertise and thus promotes the automation to a higher level.
In terms of the time efficiency of the proposed method, the details are discussed as follows. Our method consists of two stages. In the first stage, the orbital information is used to estimate the rough transformation relation between images. This process is very fast and will not increase the total co-registration time. The second stage is to calculate the offsets by the cross-correlation of patches. Since the improved method can keep some unnecessary co-registration regions out, it costs much less co-registration time than the standard method, especially for images containing many incoherent areas such as water bodies. After the first stage, the first resampling operation should be performed to the slave scene. The 2D sinc interpolator is usually adopted for resampling. Its computational efficiency is much higher than that of offset calculations during co-registration. The reason is that the latter operation involves a Fourier Transform, an inverse transform, a conjugate multiplier, an interpolation to acquire the positions of peaks, and the oversampling in most cases. However, if the resampling results from the first stage must be stored in the hard disk and be read from the disk in the second stage, the consumed time cannot be ignored. Therefore, the resampling results in the first stage are always saved to RAM in practice. With regard to insufficient memory, the images can be divided into sub-blocks to do co-registration. Generally speaking, the proposed method is able to achieve a higher automation degree while taking no more time than the standard method.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}