
Automated Surveillance of Fruit Flies


Abstract
:1. Introduction
- (a)
- Increased productivity due to timely delivery of comprehensive information to a central agency. The central agency receives information on the location and density of the targeted pest as well as microclimate parameters. This information can be used to alert for the presence of the pest and serve as supportive evidence to initiate treatment procedures. The onset of an infestation is a crucial parameter that is often missed in manual inspections as it may fall between scheduled manual visits. Traps are visited every 5 days. In this time period the amount of B. oleae insects inside the trap would not exceed 20, because the Economic Injury Level for B. oleae is 5–20 insects per trap in a 5 days period. Economic Injury Level in pest management means that if you miss this point then economic damage begins and in the case of this pest it can be large.
- (b)
- Time-stamping of the event of insect entrance in the trap allows the gathering of precise information on the life cycle of the pests and their relation with different pheromone and/or food baits. Moreover, it allows continuous and real-time evaluation of the results of applied treatments. The central monitoring agency securely reflects the current situation of the infestation and not a situation that has evolved to an unknown state due to delays in the delivery and interpretation of the relevant information.
- (c)
- Reduction on the application of pesticides and increase of their applied efficiency. Cultivators often start treatment too early or overspray for fear of missing the infestation onset. Knowledge of where and when to apply a treatment can mitigate the problem of over-application of pesticides in one region and under-application in another.
- (d)
- Increase the profit margin by decreasing the current labor-intensive and expensive manual monitoring activities. Current manual inspection involves field scouters visiting a remote network of traps on a regular basis. This procedure entails a time lag between the phenomenon and its report, and increases the cost due to transportation expenses and wages.
- (e)
- For countries where fruit production represents a significant percentage of the total gross income, monitoring and control is handled by the state, while agricultural unions and large orchard owners can take further actions. Once the trap is located, the human observer must discern and count the targeted pests. This is not always feasible as these may have disintegrated or be obscured in a maze of insects. This practice is a complicated procedure that involves open tenders, contracts, qualified personnel working at different report layers. Because of the number and location of the traps, the frequent trips and the expertise required, the requirements of the monitoring protocol are compromised in practice, as one may judge from the large reported losses due to Diptera infestations.
- (a)
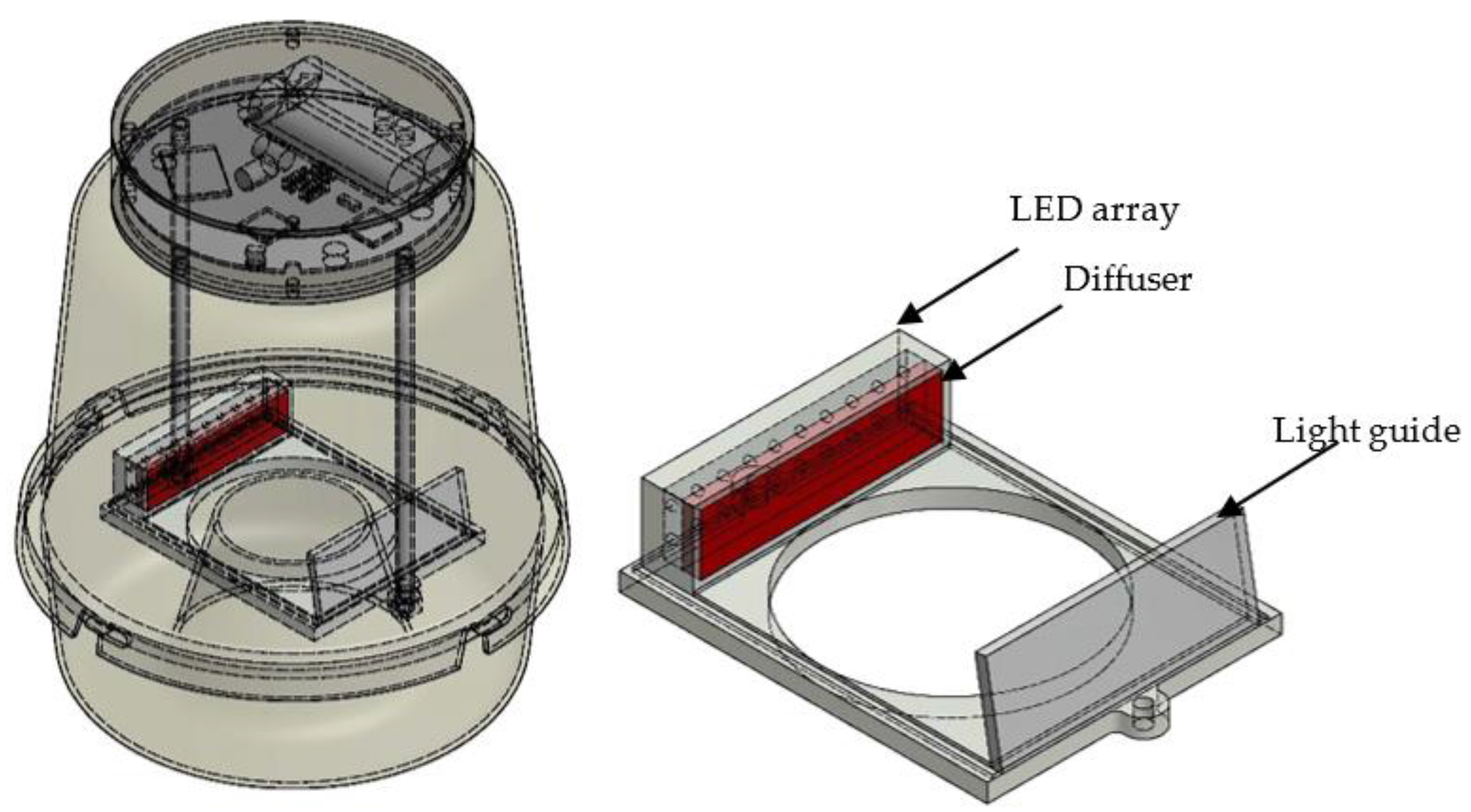
- The receiving aperture of the sensor is made large enough to allow tracking of fast flying insects such as fruit flies that would otherwise spend little time inside the field of view (FOV) while crossing the surface of a single photodiode. Lack of sufficient duration data is translated into poor frequency resolution for fast flying insects such as fruit flies.
- (b)
- Our boards were redesigned based on low-power electronics and optimized software to maintain power consumption at a sufficiently low level in order to be able to operate the device in the field for at least two months without the need for a solar panel.
- (c)
- Our new algorithmic design based on interrupt-driven circular buffers never misses the onset of the wingbeat, even when it occurs before the initialization of the recording process.
2. Materials and Methods
2.1. Internal Configuration
2.2. Electronics
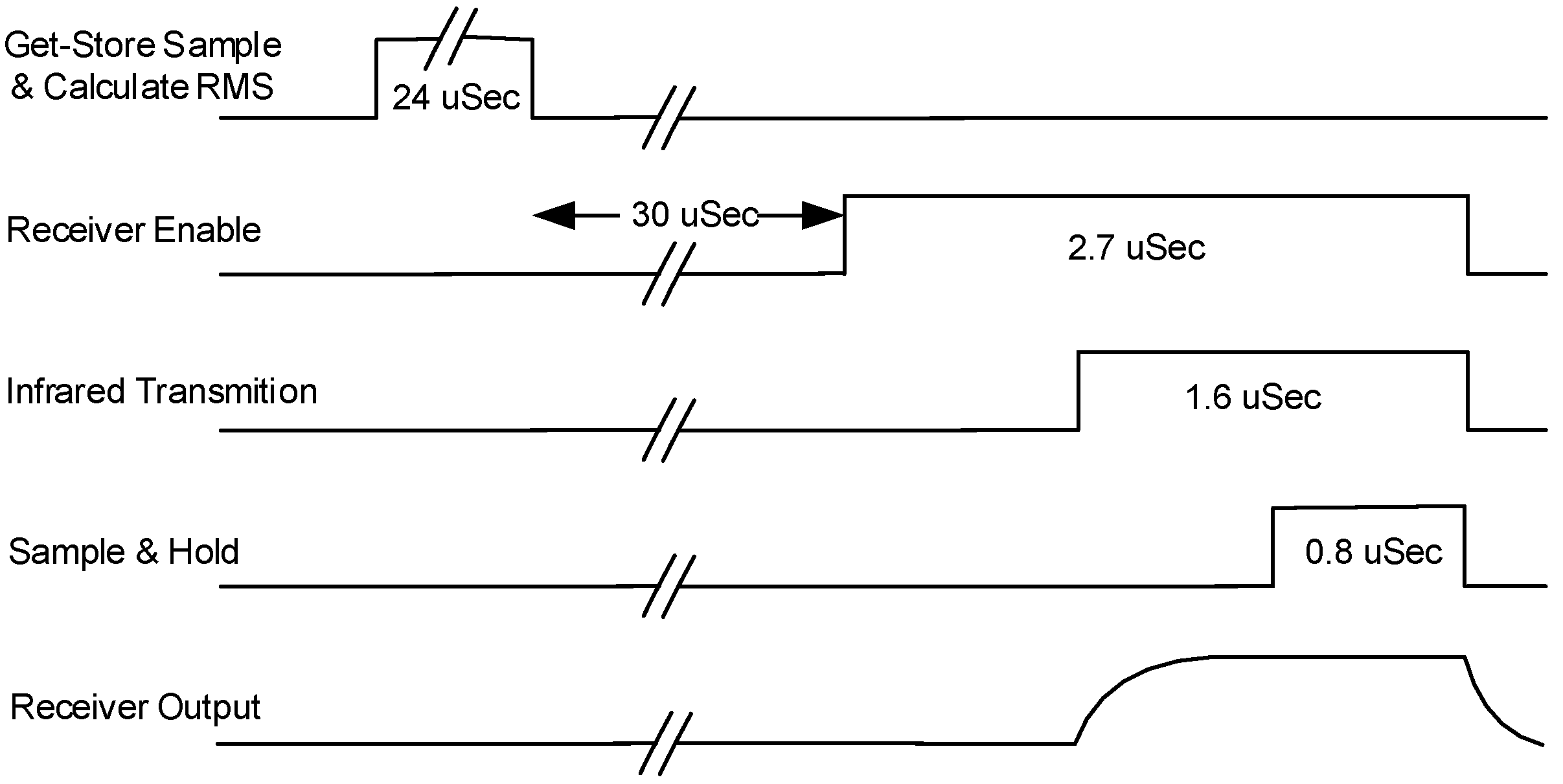
- ADC process and data storage
- After 24 μs, enable receiver
- At 1100 ns, emit a 1.6 μs pulse
- At 800 ns, Sample—Hold for 800 ns
- De-activate emitter, de-activate receiver.
2.3. Code
3. Results
3.1. Verification Results in the Lab
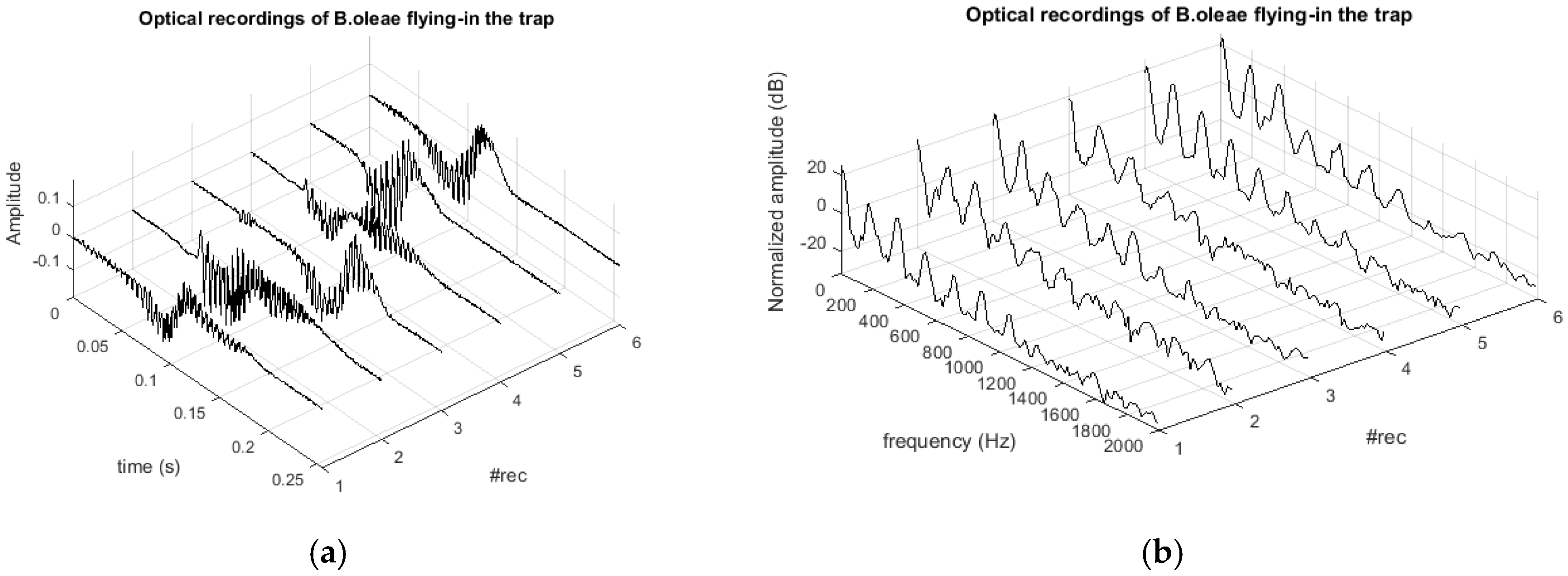
3.2. Verification Results in the Field
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Part Number | Qty/Board | Price/Board | ||
|---|---|---|---|---|---|
| 1 | 100 | 1000 | |||
| Emitter | SFH4356 | 20 | 13.36 | 3.58 | 3.36 |
| Receiver | TEMD5110X01 | 13 | 12.4 | 7.48 | 6.34 |
| Microcontroller | MSP432P401R | 1 | 9 | 5 | 3.58 |
| Temperature/RH Sensor | Si7021 | 1 | 3.98 | 3.19 | 2.87 |
| GSM/GPS | SIM908 | 1 | 22 | 17 | 15 |
| Other Electronic Components | ICs, Capacitors, Resistors, Connectors, PCBs | 15 | 11 | 7 | |
| Plastic parts | Receiver & Transmitter housing, McPhail trap, add-on kit, diffuser | 5 | 4 | 3 | |
| Battery | SAMSUNG IRCI18650-32A | 2 | 14 | 11 | 8 |
| Total (€) | 94.74 | 62.25 | 49.15 | ||
References
- Oerke, E.C.; Dehne, H.W.; Schönbeck, F.; Weber, A. Crop Production and Crop Protection: Estimated Losses in Major Food and Cash Crops; Elsevier Science: Amsterdam, The Netherlands, 1994. [Google Scholar]
- Drake, V.A. Radar Entomology; CABI Publishing: Canberra, Australia, 2010. [Google Scholar]
- Gebru, A.; Rohwer, E.; Neething, P.; Brydegaard, M. Investigation of atmospheric insect wing-beat frequencies and iridescence features using a multispectral kHz remote detection system. J. Appl. Remote Sens. 2014, 8, 083503. [Google Scholar] [CrossRef]
- Mullen, E.R.; Rutschman, P.; Pegram, N.; Patt, J.M.; Adamczyk, J.J.; Johanson, E. Laser system for identification, tracking, and control of flying insects. Opt. Express 2016, 24, 11828–11838. [Google Scholar] [CrossRef] [PubMed]
- Hendricks, D.E. Development of an electronic system for detecting Heliothis spp. moths (Lepidoptera: Noctuiidae) and transferring incident information from the field to a computer. J. Econ. Entomol. 1989, 82, 675–684. [Google Scholar] [CrossRef]
- Watson, A.T.; O’Neill, M.A.; Kitching, I.J. Automated identication of live moths (macrolepidoptera) using digital automated identication system (daisy). Syst. Biodivers. 2003, 1, 287–300. [Google Scholar] [CrossRef]
- Jiang, J.A.; Tseng, C.L.; Lu, F.M.; Yang, E.C.; Wu, Z.S.; Chen, C.P.; Liao, C.S. A GSM-based remote wireless automated monitoring system for field information: A case study for ecological monitoring of the oriental fruit fly, Bactrocera dorsalis (Hendel). Comput. Electron. Agric. 2008, 62, 243–259. [Google Scholar] [CrossRef]
- Holguin, G.A.; Lehman, B.L.; Hull, L.A.; Jones, V.P.; Park, J. Electronic traps for automated monitoring of insect populations. IFAC Proc. Vol. 2010, 43, 49–54. [Google Scholar] [CrossRef]
- Bromenshenk, J.J.; Henderson, C.B.; Seccomb, R.A.; Welch, P.M.; Debnam, S.E.; Firth, D.R. Bees as Biosensors: Chemosensory Ability, Honey Bee Monitoring Systems, and Emergent Sensor Technologies Derived from the Pollinator Syndrome. Biosensors 2015, 5, 678–711. [Google Scholar] [CrossRef] [PubMed]
- Unwin, D.M.; Ellington, C.P. An optical tachometer for measurement of the wing-beat frequency of free-flying insects. J. Exp. Biol. 1979, 82, 377–378. [Google Scholar]
- Potamitis, I.; Rigakis, I. Measuring the fundamental frequency and the harmonic properties of the wingbeat of a large number of mosquitoes in flight using 2D optoacoustic sensors. Appl. Acoust. 2016, 109, 54–60. [Google Scholar] [CrossRef]
- Potamitis, I.; Rigakis, I. Novel Noise-Robust Optoacoustic Sensors to Identify Insects through Wingbeats. IEEE Sens. J. 2015, 15, 4621–4631. [Google Scholar] [CrossRef]
- Potamitis, I.; Rigakis, I. Large Aperture Optoelectronic Devices to Record and Time-stamp Insects Wingbeats. IEEE Sens. J. 2016, 16, 6053–6061. [Google Scholar] [CrossRef]
- Potamitis, I.; Rigakis, I.; Fysarakis, K. Insect Biometrics: Optoacoustic Signal Processing and Its Applications to Remote Monitoring of McPhail Type Traps. PLoS ONE 2015, 10, e0140474. [Google Scholar] [CrossRef] [PubMed]








| Process | Time |
|---|---|
| Collect data | 200 ms |
| Copy data to buffer | 800 μs |
| 4×FFT (256 points) | 7 ms |
| Log10 | 800 μs |
| Decision | 1.2 ms |
| Store in SD | 60 ms |
| Total | 269.8 ms |
| Insect | #Rec |
|---|---|
| B. oleae | 913 |
| C. capitata | 623 |
| Drosophila+ | 166 |
| L. aristella | 771 |
| Total | 2473 |
| Classifiers | %Mean Acc./Std |
|---|---|
| Linear SVC 1 | 88.46/1.24 |
| RBF SVM 2 | 90.52/0.99 |
| RF 3 | 91.05/1.55 |
| ADABOOST | 88.62/1.01 |
| X-TREE 4 | 91.13/1.21 |
| GBC 5 | 91.63/1.31 |
| CNN 6 | 90.40/1.18 |
| Species | Random Forest Classifier | |||
|---|---|---|---|---|
| Precision | Recall | F1 | #Rec | |
| B. oleae | 0.96 | 0.94 | 0.95 | 319 |
| All other | 0.90 | 0.92 | 0.91 | 176 |
| Avg/total | 0.93 | 0.93 | 0.93 | 495 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Potamitis, I.; Rigakis, I.; Tatlas, N.-A. Automated Surveillance of Fruit Flies. Sensors 2017, 17, 110. https://doi.org/10.3390/s17010110
Potamitis I, Rigakis I, Tatlas N-A. Automated Surveillance of Fruit Flies. Sensors. 2017; 17(1):110. https://doi.org/10.3390/s17010110
Chicago/Turabian StylePotamitis, Ilyas, Iraklis Rigakis, and Nicolaos-Alexandros Tatlas. 2017. "Automated Surveillance of Fruit Flies" Sensors 17, no. 1: 110. https://doi.org/10.3390/s17010110
APA StylePotamitis, I., Rigakis, I., & Tatlas, N. -A. (2017). Automated Surveillance of Fruit Flies. Sensors, 17(1), 110. https://doi.org/10.3390/s17010110