Techniques for detection of vibrations claim a wide range of applications, especially in the industrial and civil contexts, but also in biomedical engineering and security. There are different methods to analyze this kind of phenomenon, each basically suitable for monitoring a certain type of event. In the industrial field, the accurate vibration control of rotating machinery plays an important role in the prevention of failures of production plants. In this context, the most commonly used technologies adopt microelectromechanical systems (MEMS) or piezoelectric sensors, which are placed in direct contact with the activity source to be monitored. The mentioned approaches allow for achieving good results [
1,
2,
3], but being directly subject to mechanical stresses, the sensors are exposed to wear and thus to a progressive alteration during their operation time. Optical methods, implemented with optical fibers placed at small distance from the monitored items, allow for obtaining higher reliability [
4,
5,
6,
7], but similarly to the piezoelectric sensors, they generally offer operating bandwidths on the order of a few kHz [
8,
9], and require the use of sophisticated signal analyzers to obtain good resolutions in results.
A different solution to the use of punctual position sensors, in the context of vibrations monitoring, is given by the use of remote sensors based on coherent radars. The use of Doppler radar techniques is increasingly popular for monitoring vibrations in the civil context, such as in the remote monitoring of the dynamic characteristics of buildings [
10,
11]. Similar applications can be found in the biomedical field for the development of physiological sensors able to monitor breathing and heart rate [
12,
13]. However, the implementation of a Doppler radar includes the use of laboratory test equipment or custom hardware on printed/integrated circuits, and this makes the system rather bulky and expensive [
14]. Even if a lot of contributions exist in literature, all of them are based on standard hardware architectures, and are thus not able to change the operating frequency band and the related parameters in real time. In Reference [
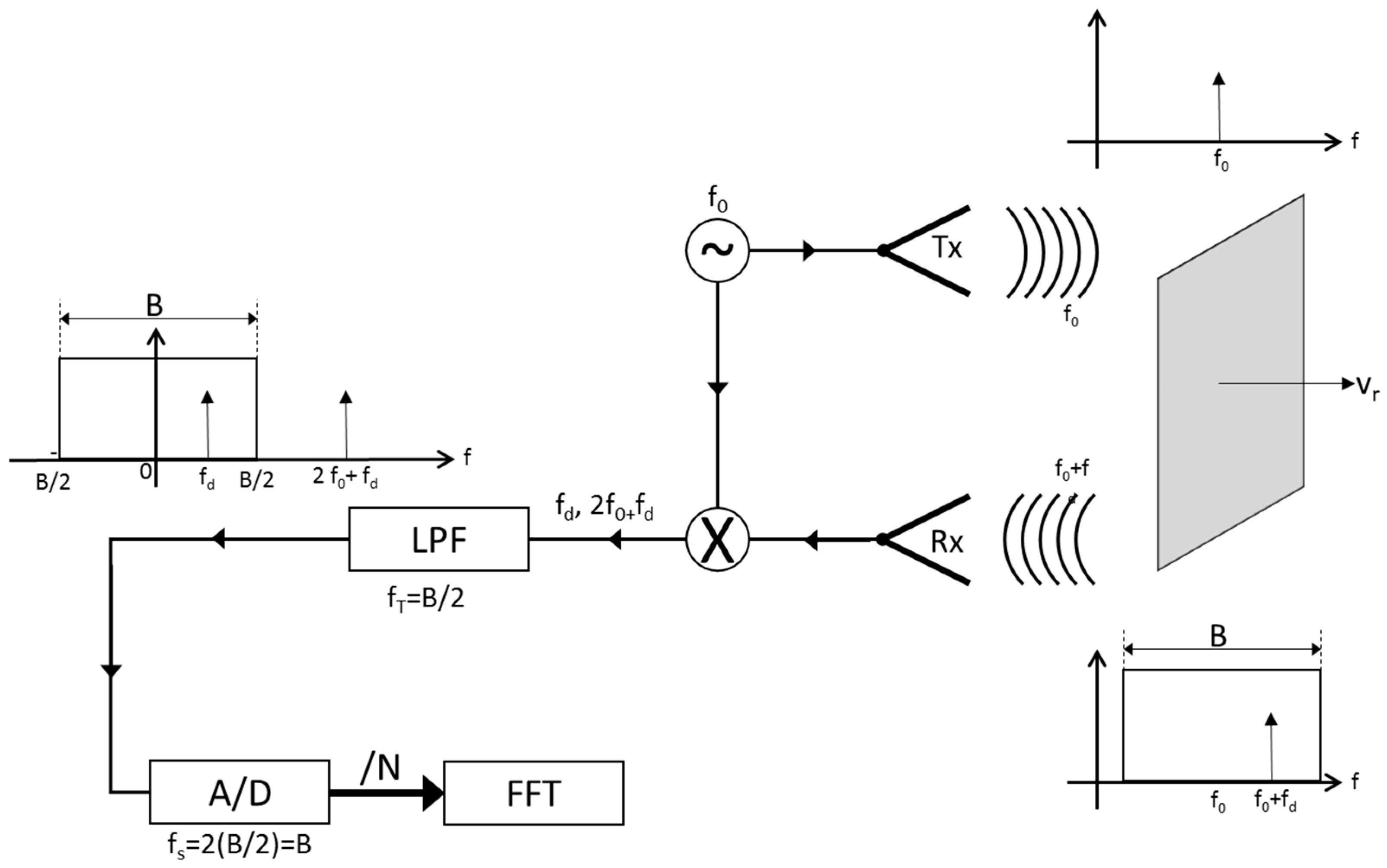
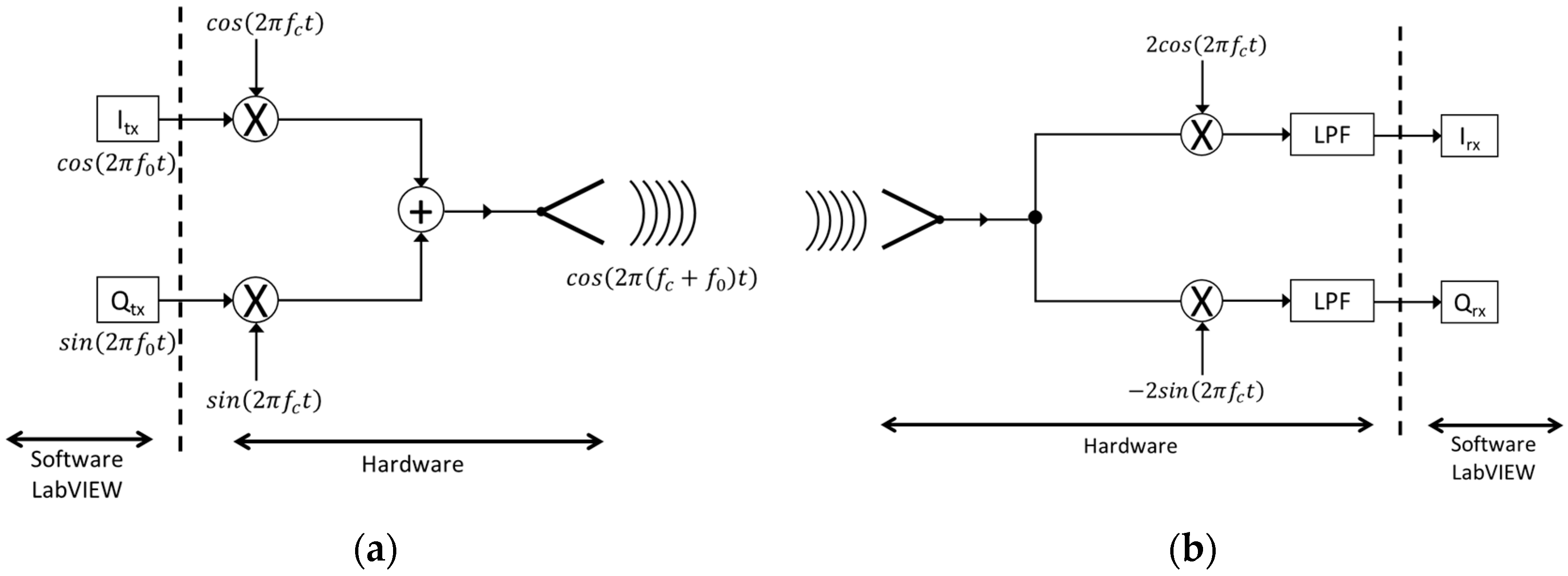
15], a classical continuous-wave (CW) Doppler radar configuration is assumed, and the problem of amplitude and distance dependency of noncontact vibration measurements is faced. Then, an extended differentiate and cross-multiply (DACM) algorithm is proposed and investigated, adopting the arctangent demodulation approach to recover the phase shift caused by the movement of the object. As it will be discussed in the next section, we completely avoid the codomain restriction due to the standard arctangent method by adopting the fast Fourier transform (FFT) to retrieve the phase shift related to the target vibration instead. In Reference [
16], the modulation sensitivity of Doppler radar, again assumed in the classical hardware configuration, is investigated, by discussing the opportunity to adopt high microwave bands, which, however, result in being bulky in size and power consuming. To perform the sensitivity tests at two different frequencies, two distinct hardware radar sensors are realized in [
16], thus increasing the overall cost. In Reference [
17], a CW hardware configuration including three antennas and four receiver modules is realized and tested for tracking multiple humans in three-dimensional space, namely azimuth, elevation and range. Once again, the operating frequency is fixed once, limited by the hardware components. In this work, a completely new approach for Doppler radar implementation, fully based on a software-defined platform, is proposed. This alternative, flexible and low cost solution can be obtained through the use of a Software-Defined Radio (SDR) transceiver [
18,
19], which leads to implementing a multi-function radar, known as a Software Defined Radar (SDRadar) [
20,
21], composed of Radio Frequency (RF) hardware modules fully reconfigurable via software. An SDRadar system allows for realizing most of the basic operations (e.g., modulation, demodulation, filtering and mixing) by the simple use of programmable software modules, instead of specific hardware components [
19], thus leading to a faster and cheaper development and manufacturing, as compared to conventional custom radars [
22]. The choice of a software instead of a hardware platform is performed in this work to overcome the limits imposed by electronic circuitries. As a matter of fact, while architectonic structures limit the performances in terms of detectable frequency, due to the specific (fixed) adopted hardware, our solution is highly flexible. In particular, SDRadar is fully able to satisfy the frequency detection requirements, even in the presence of very low values (e.g., typical of heart oscillations), by simply changing via software the bandwidth, and thus the frequency detection range and the resolution. Even if many Printed Circuit Board (PCB) and chip level realizations of custom radar sensors can be actually found at a low price, the main benefit derived from our SDRadar solution is the demonstration of using programmable non-custom-designed RF equipment for radar motion detection study. This will enable researchers without radio frequency/microwave circuit backgrounds to study the signal processing, system consideration, and potential applications for microwave motion sensors. The high flexibility of the proposed software architecture, essentially related to the possibility of carrying out fast detections without the need to use wearable sensors or instruments in direct contact with the item to be monitored, makes these types of systems suitable to the detection of vibrations originating from different phenomena, as those generated by industrial plants. Moreover, the proposed contactless approach can be successfully adopted for the monitoring of vital parameters, with application in security systems based on the body motion detection, or in those emergency situations for the detection of people buried under critical conditions.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}