1. Introduction
Understanding the characteristics of liquid films in gas-liquid two-phase flows is an important part of the safety and performance analyses of nuclear power plant systems. For this reason, numerous studies have been conducted in an effort to measure local liquid film thicknesses under two-phase flow conditions. There are various methods that can be used to measure film thicknesses. Several widely applied methods are the ultrasonic, optical, neutron and electrical methods. The ultrasonic method measures the liquid film thickness using the time difference between signals reflected from the boundary interface of the medium. As the velocity of sound is affected by its medium, however, the ultrasonic method has rather low precision [
1]. Therefore, this method is limited when used to measure the thicknesses of thin films. Furthermore, multiple-point measurements with the ultrasonic method are confined due to the high cost of the device [
1]. Optical methods require a high-speed camera, diffraction tools, and X-ray tomography. Though most optical methods have high spatial and time resolutions, they are limited when applied to complicated flow conditions, as the light is distracted at the boundary interface [
2]. Neutron-based methods usually measure the film thickness with a tomography-based approach. Though the spatial resolution of this method is sufficiently high, only time-averaged data is provided. This method also incurs high costs when setting up the measurement device. The electrical method is widely used in two-phase experiments given that it can measure not only the liquid film thickness but the void fraction. Most electrical methods use the electric conductivity of the liquid to measure the liquid film thickness. For non-conductive liquids, the capacitance method is applied to measure the film thickness. Generally, electrical methods for liquid film measurements have high time resolutions due to their electrical characteristics. However, the electrode size and geometry cause relatively low spatial resolutions in multiple-point measurements, representing a limitation of the electrical methods.
Damsohn et al. [
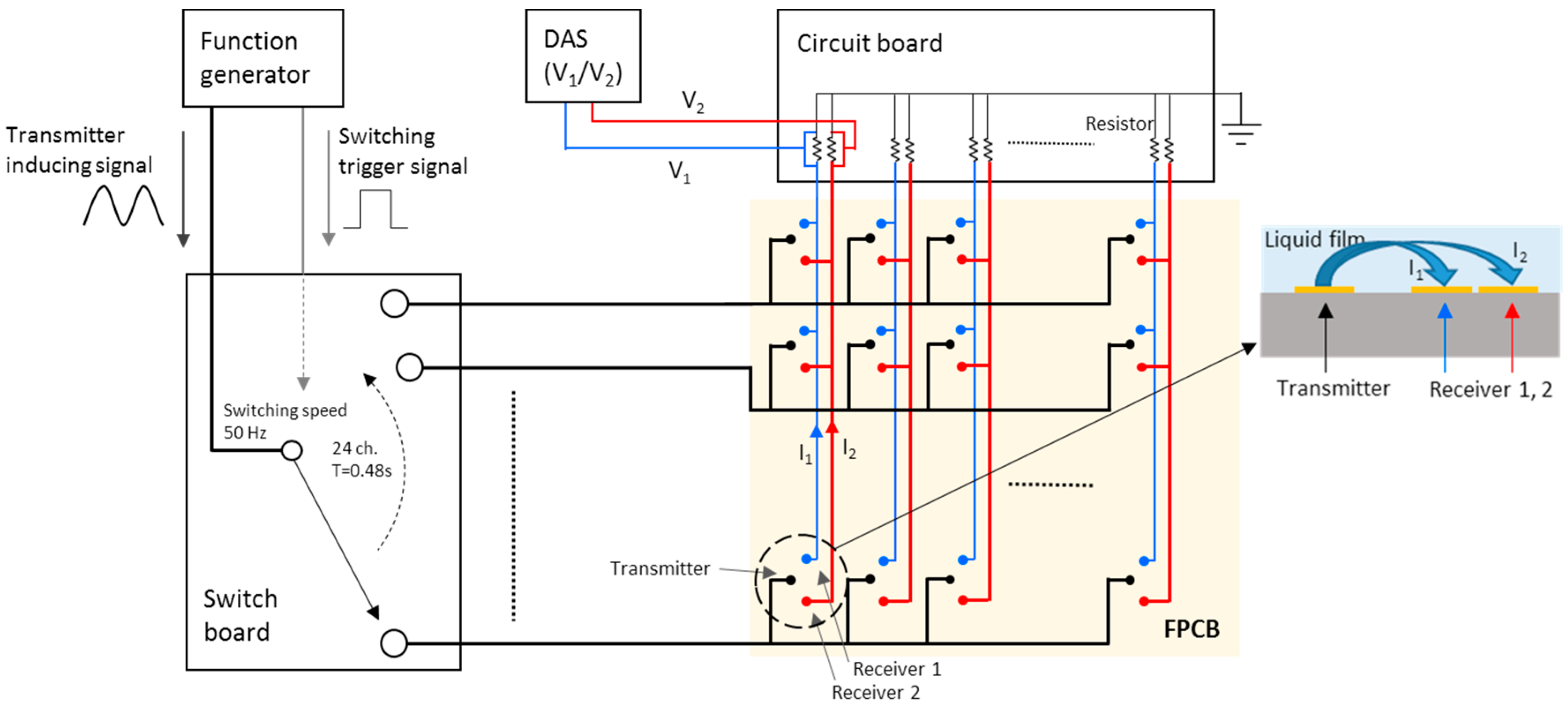
3] proposed an electrical method on a printed circuit board (PCB) in order to measure local liquid film thicknesses and to overcome the above-mentioned limitation of the electrical method regarding the spatial resolution. A PCB, which allows the elaborate fabrication of electrodes, enabled high spatial resolutions of the liquid film thickness field to be realized. Furthermore, by coupling the sensor with a wire-mesh circuitry system, high time resolutions are achieved simultaneously. The wire-mesh sensor principle is based on a matrix-like arrangement of the measuring points. Two sets of wire electrodes are stretched perpendicularly to each other, with a small axial separation distance between them. The transmitter electrodes are sequentially activated while all receiver electrodes are parallel-sampled in such a way that the electrical conductivity of the fluid at each crossing point can be evaluated. Based on these measurements, the sensor is thus able to determine the instantaneous fluid distribution across the cross-section [
3].
In other work, the electrode used in the electrical method also was fabricated on a flexible printed circuit board (FPCB) for application onto a curved surface. Arai et al. [
4] and D’Aleo et al. [
5] also used this method to measure the liquid film thickness in an annulus channel and in a microchannel, respectively. Coupling a PCB or FPCB with wire-mesh circuitry provides high time and space resolutions simultaneously, but the experimental condition is restricted to an isothermal condition, as the electrical conductivity of the liquid is affected by its temperature. According to Hayashi [
6], the conductivity of water increases by approximately 2% when the water temperature increases by 1 °C.
The objective of this study is to develop the concept of a liquid film sensor fabricated on an FPCB, which works accurately under temperature-varying flow conditions. The motivation behind this arose from an experiment by Yang et al. [
7] on the two-dimensional liquid film behavior. They measured reductions in the liquid film thickness after impingement on a rectangular duct with a transverse air flow using the ultrasonic method; the experimental data were then used to improve the wall and interfacial friction factor models of the nuclear reactor safety analysis code. However, under actual flow conditions, the working fluids are saturated steam and subcooled water. Therefore, condensation occurs at the interaction between the two phases. The condensation increases the water temperature and changes the electrical conductivity of the fluid. As a result, the conventional electrical method cannot be applied under this flow condition. Furthermore, the plate duct in their experiment simulated the unfolding downcomer annulus of a nuclear reactor pressure vessel. However, the geometry of interest in practical situations is the annulus channel rather than the plate duct. Therefore, a liquid film sensor which can be used with a curved geometry is required in order to extend the findings of Yang et al. to more realistic flow conditions. The fabrication of a liquid film sensor on an FPCB was selected for this reason.
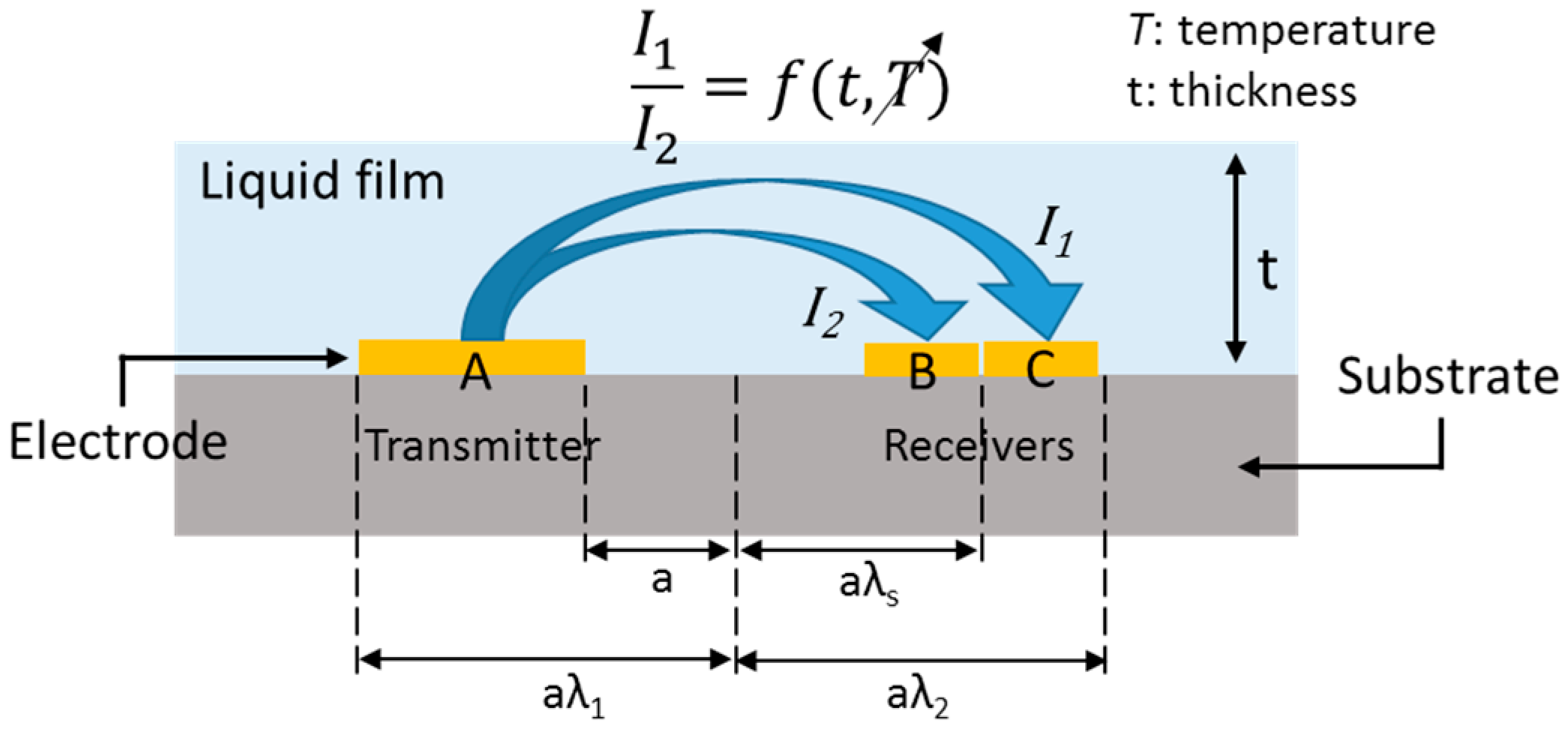
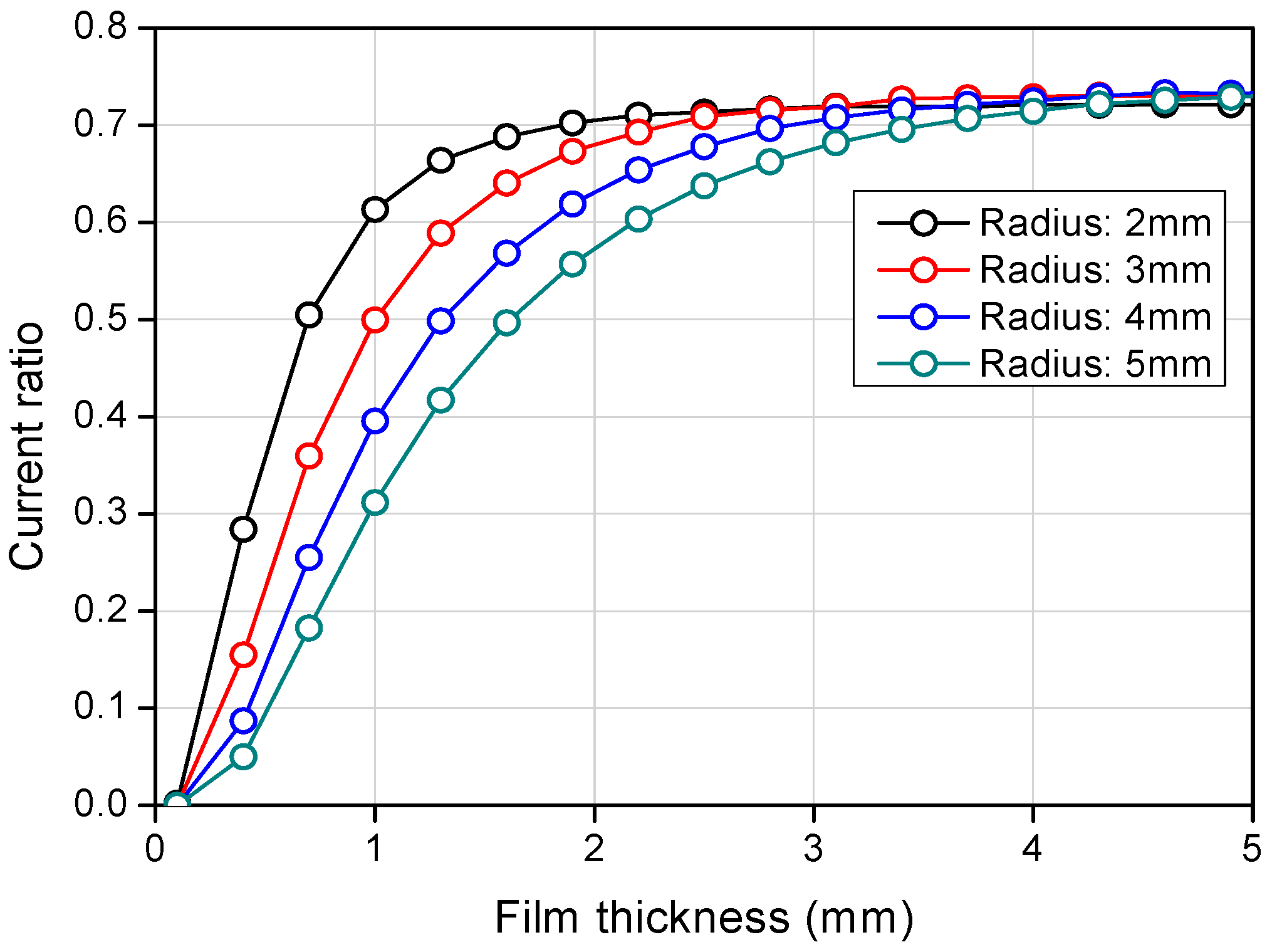
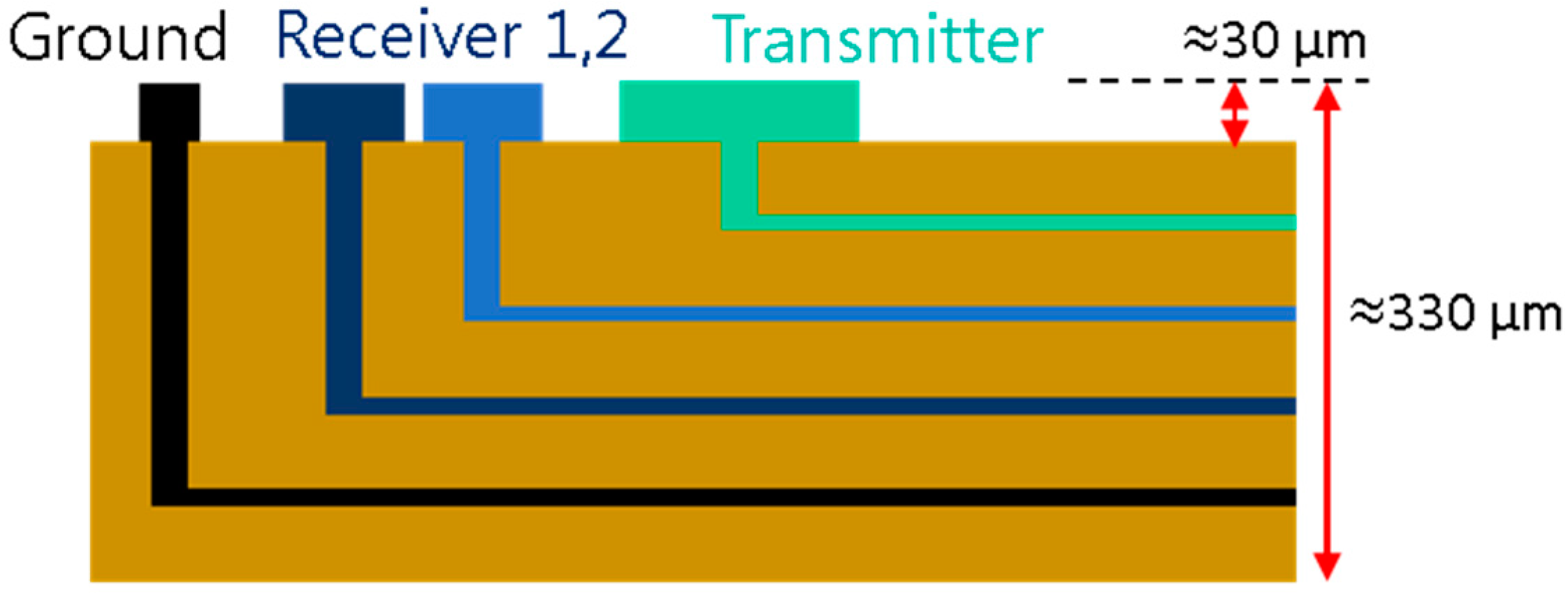
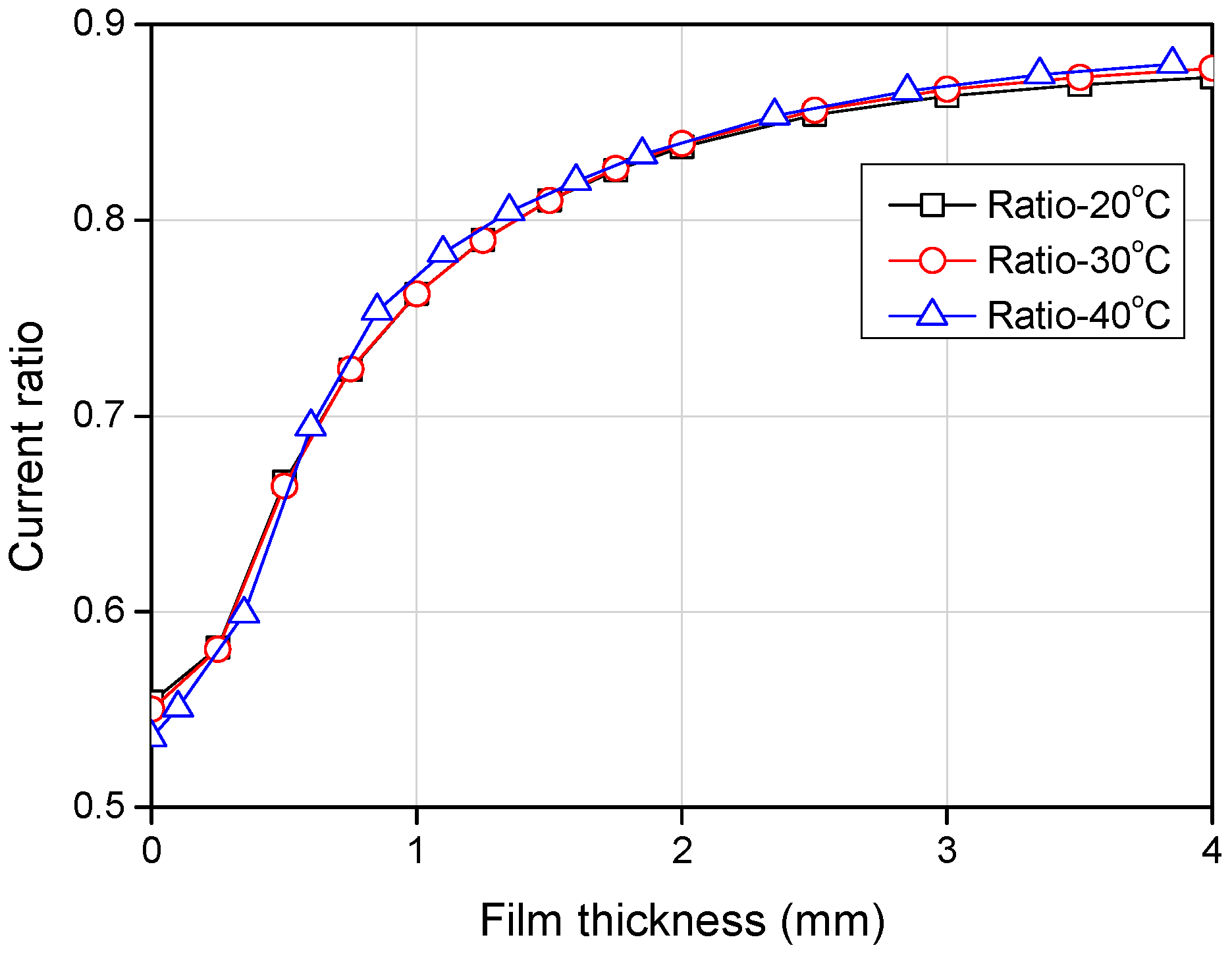
For liquid film measurements under varying conductivity conditions, a three-electrode method was proposed initially by Coney [
8] using parallel rectangular electrodes. According to him, if the receiving electrode is segmented into two parts perpendicularly to the current direction, the liquid film thickness can be measured with the current ratio acquired by the two segmented receiving electrodes. This works because the current flowing to the farther and closer parts of the segment will be proportional to the conductivity, and their ratio will depend only upon the film thickness. Kim et al. [
9] conducted experimental research on the three-electrode conductance method for liquid film measurements under varying temperature conditions. They fabricated a sensor on a PCB and assessed the temperature compensation capability of the sensor.
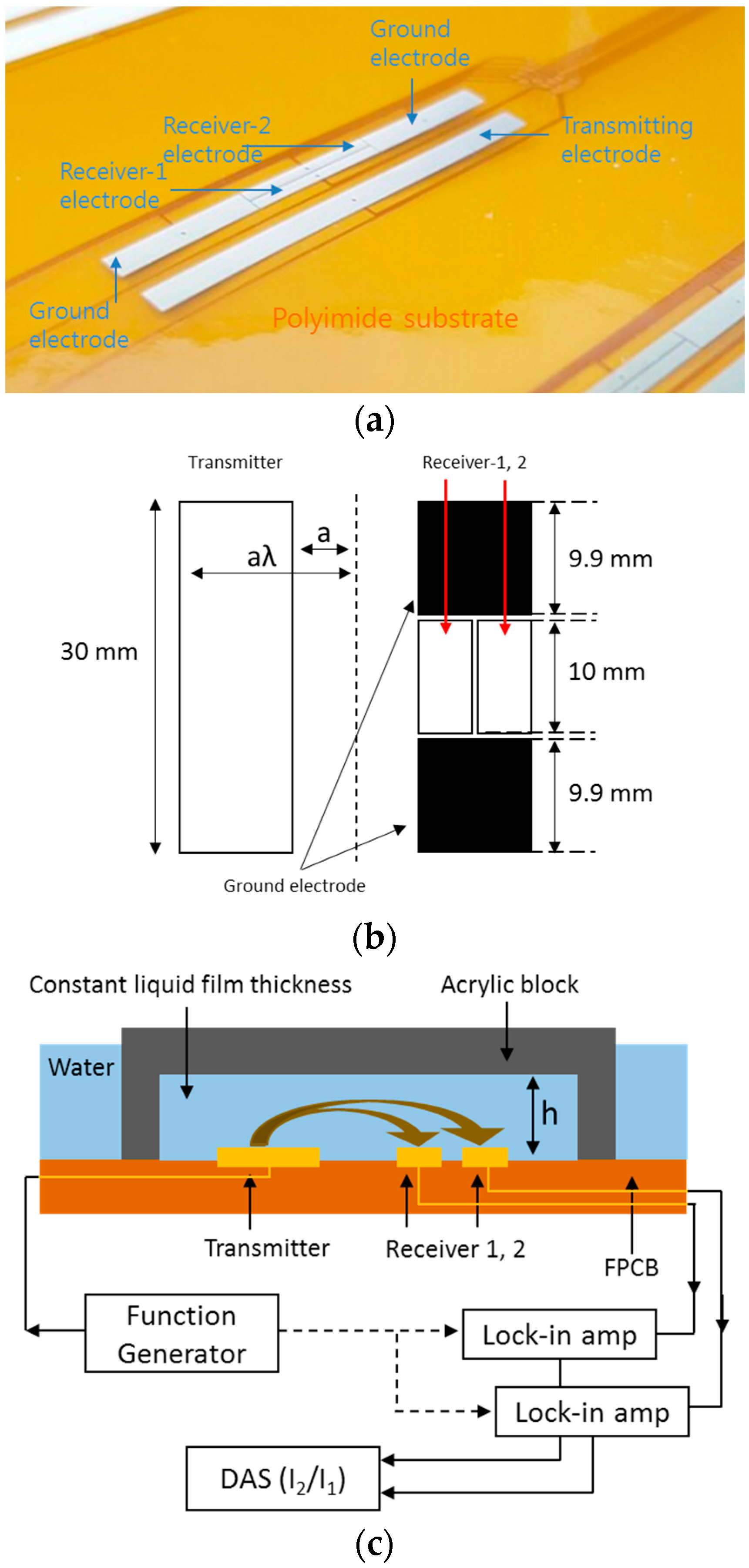
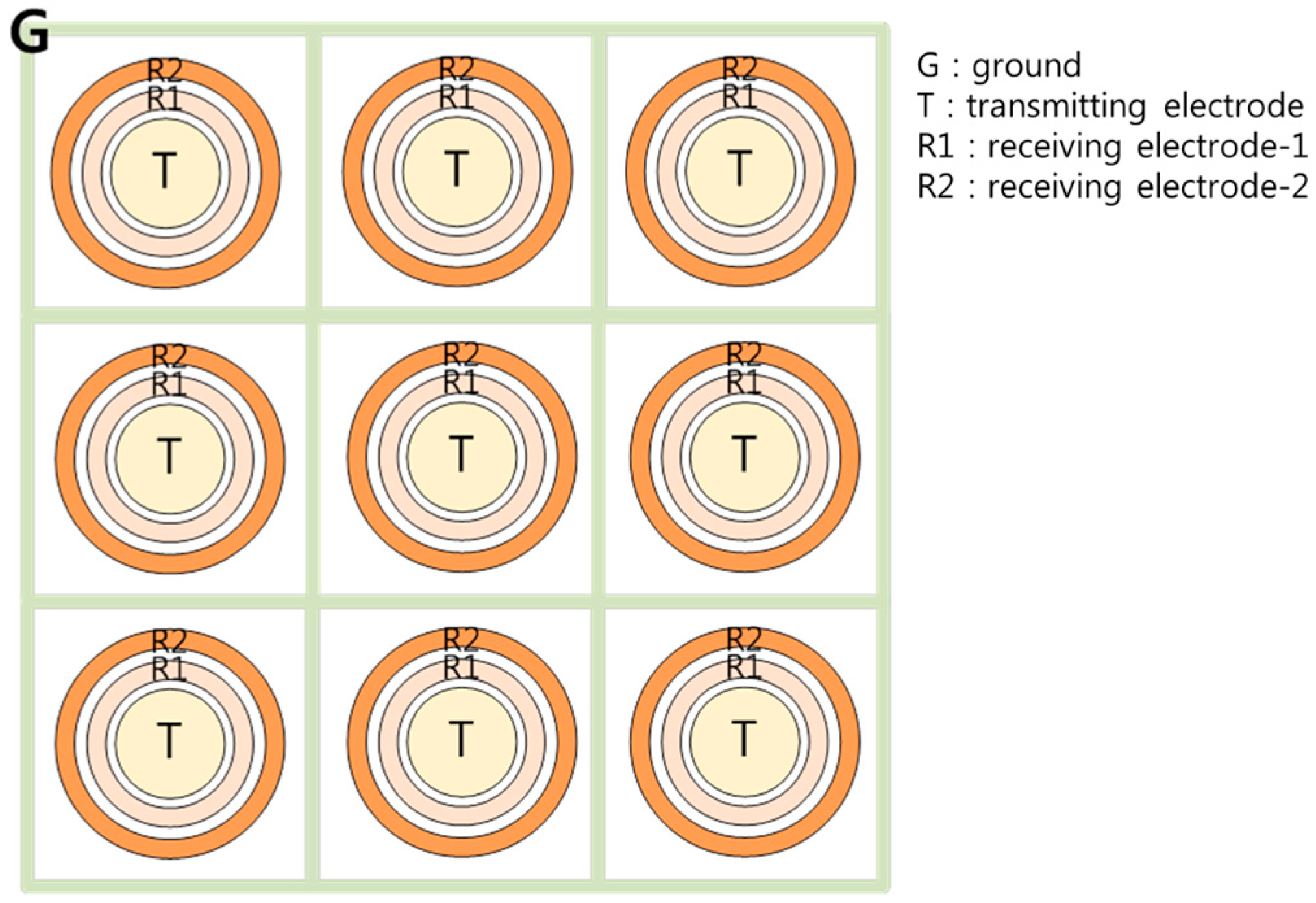
In the present study, the three-electrode conductance method for liquid film thickness measurements by Kim et al. [
9] was extended to apply the sensor to an FPCB and increase the degree of integration of the measurement points. To do this, two types of liquid film sensors were fabricated on an FPCB, one with the design from Kim et al. [
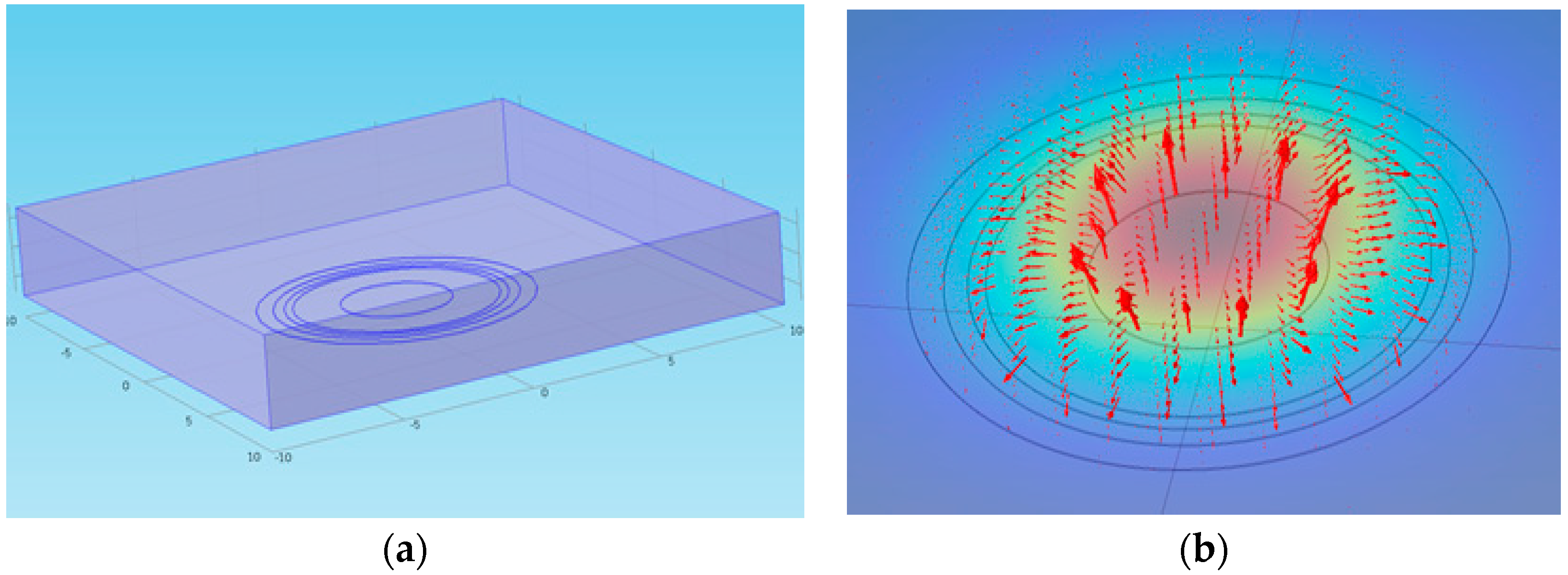
9] and the other with a new design of electrode arrangement for denser integration of the measurement points. Prototype sensors were fabricated on an FPCB after sensitivity studies of the sensor performance with the electrode geometry via an electrical potential analysis. The prototype sensors were calibrated at different temperatures and the feasibility of temperature compensation was investigated. The calibrated sensor was applied in a falling liquid film experiment in varying temperature conditions, and its working performance was tested. This paper presents the procedure of the design of the sensor, the calibration results, and the feasibility test results and discusses required future improvements.
3. Feasibility Test Result of the Liquid Film Sensor
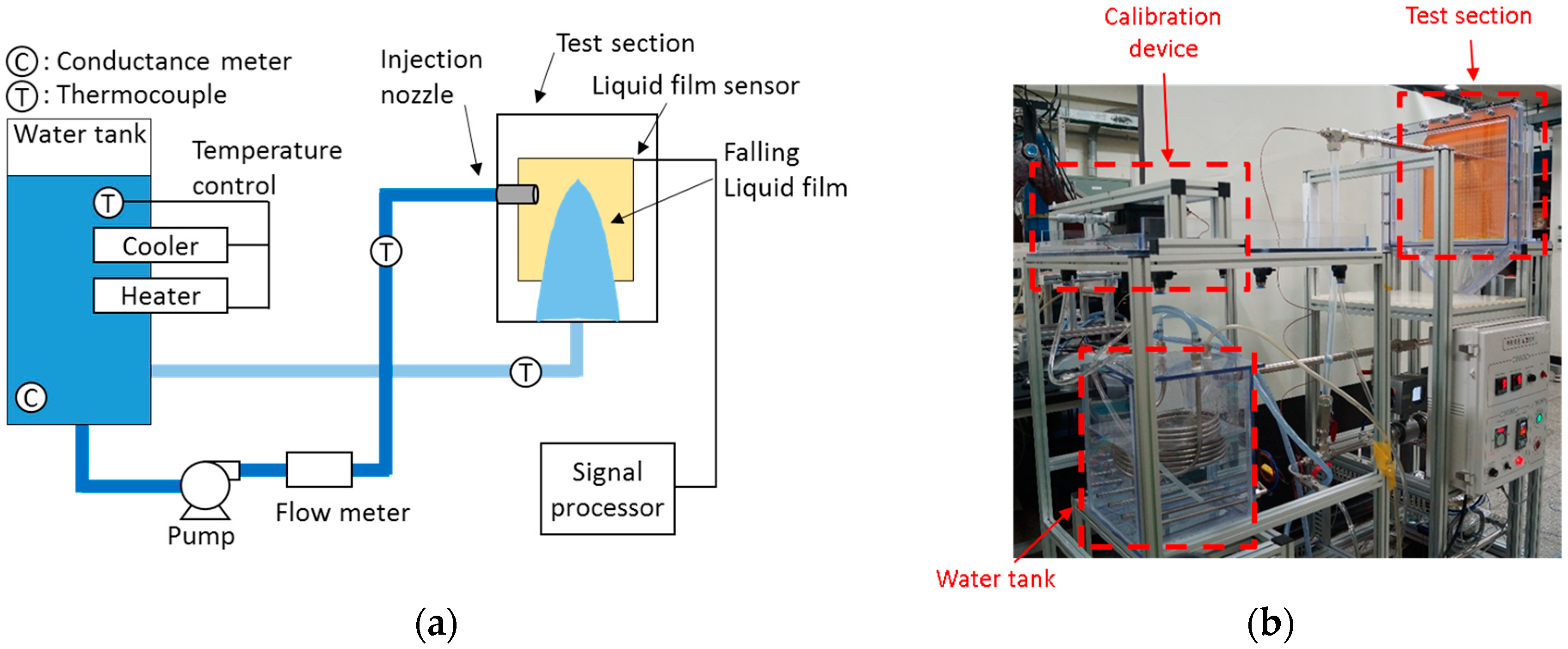
The calibrated sensor was applied for the thickness measurement of a falling liquid film after impinging on a plate wall. The apparatus for this feasibility test is illustrated and displayed in
Figure 15a,b. The water was supplied by a pump, and its flow rate and temperature were measured by an electromagnetic flow meter and a k-type thermocouple, respectively, installed downstream of the pump. The water was injected from the nozzle onto a vertical wall where the FPCB sensor was attached. The distance from the nozzle to the FPCB sensor was 25 mm and the diameter of the nozzle was 21 mm. These geometries are identical to those in Yang et al. [
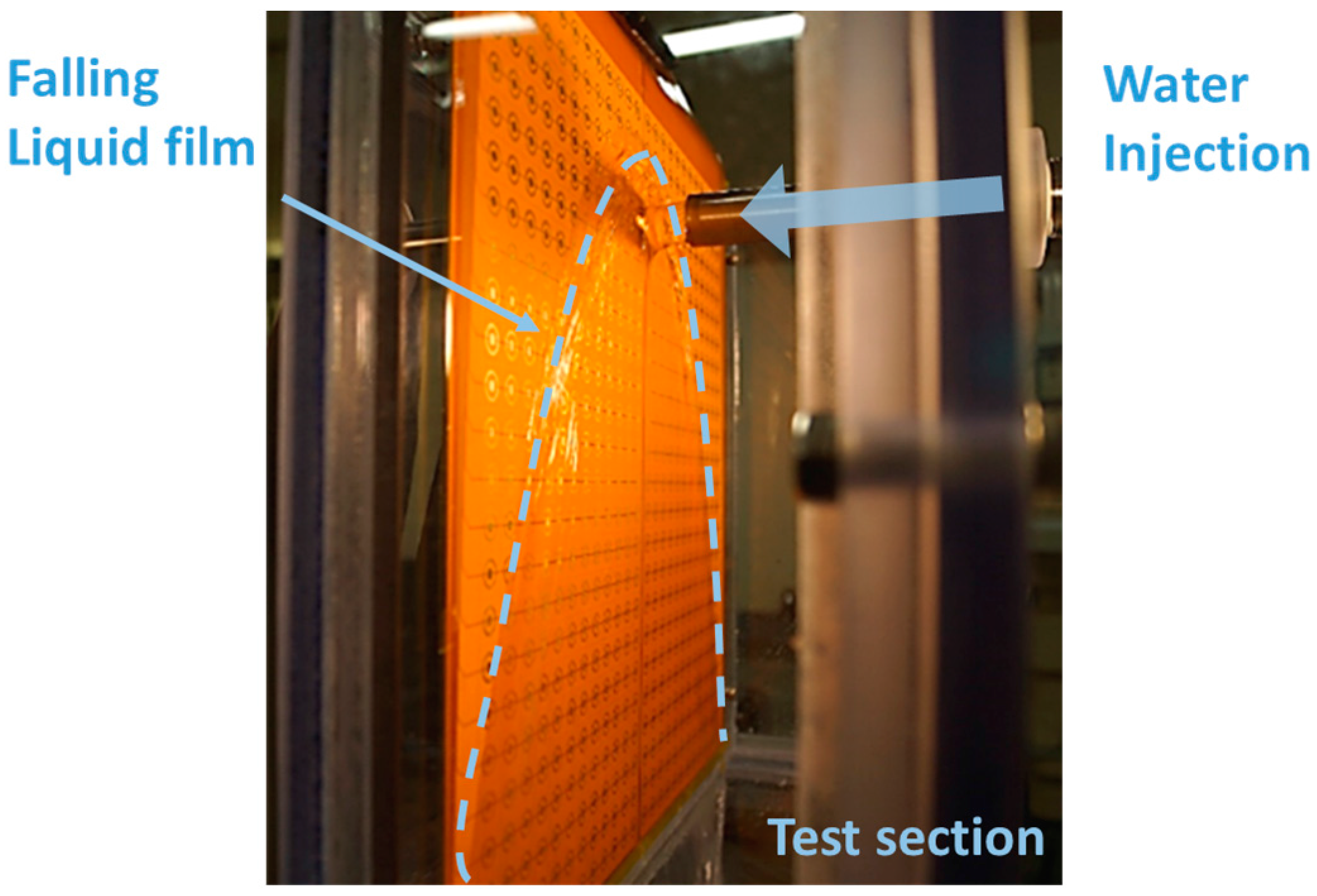
7]. The impinged liquid flowed down along the sensor surface, making a shaped liquid film, as shown in
Figure 16. The figure also shows how the sensor was installed and applied to the test section. Subsequently, the falling water exited the test section through the drain and flowed into a storage tank. In the storage tank, a heater and a cooler were installed to control the water temperature. An electrical conductance meter was also installed in the storage tank to monitor the water conductance. The details of the measurement instrument are summarized in
Table 1.
Initially, the local film thickness was measured by the FPCB sensor while controlling the velocity of the water injection, with the water temperature constant at 20 °C. The water velocities at the nozzle were 0.48, 0.68, and 0.87 m/s, which cover the reference velocity condition in the experiment by Yang et al., i.e., 0.68 m/s. To determine the time-averaged thickness of the liquid film, and the measurement at each channel was continued for five seconds.
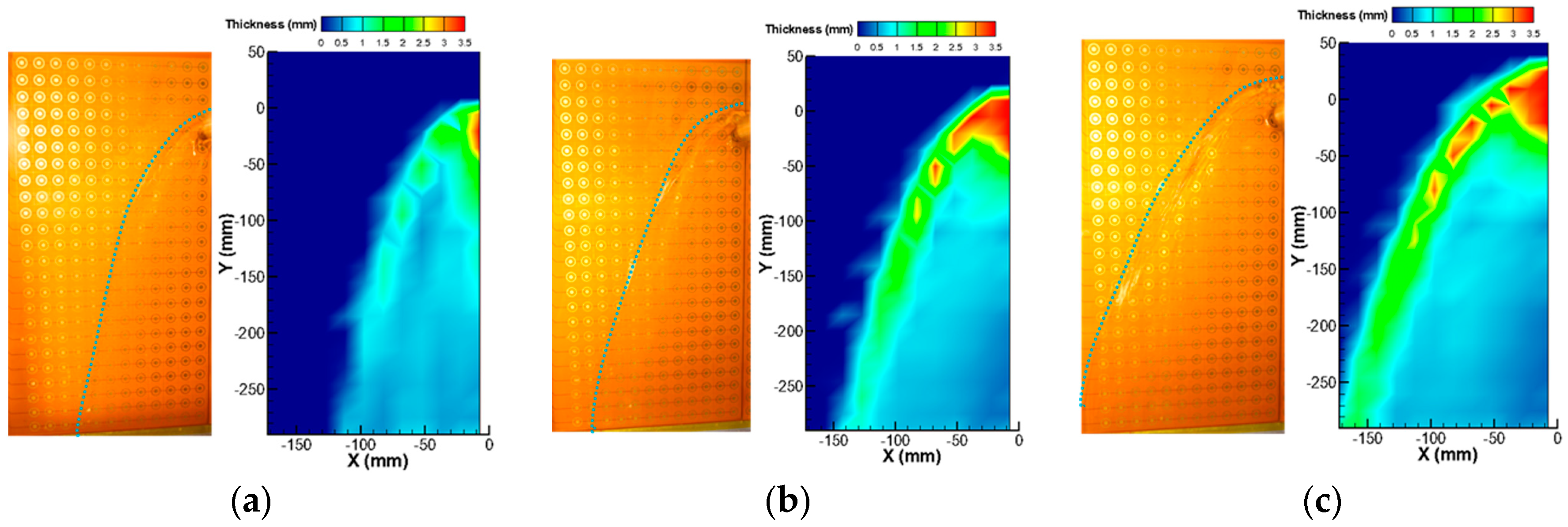
Figure 17 shows the results of the local liquid film thickness measurement with three different liquid inlet velocities. The images on the left side are those of the actual liquid film observed by the camera, and dotted lines were added to indicate the edge of the film. The figures on the right depict the distributions of the local film thickness as measured by the present liquid film sensor, and the displayed contours are the time-averaged thicknesses. In this figure, the point at (0, 0) is the center point of the water injection nozzle.
Liquid film characteristics similar to those of the visual observation results were successfully reproduced in the film thickness measurement results. Initially, the thickest liquid film was measured near the center position where the liquid jet impingement occurs. In this region, the film thickness exceeded the measurement range of the present sensor; therefore, it had constant values of the maximum measurable thickness at 3.5 mm. The parabolic falling liquid film was reasonably reproduced by the present sensor. Near the liquid film edge, a thick film thickness was measured, consistent with the visual observation due to the surface tension force exerted on the edge of the liquid film. Oscillating edge behaviors were also observed in the visualization, and, intermittently, droplets were generated and became reattached to the wall. Owing to this oscillation and entrainment near the edge, an irregular liquid film thickness appeared near the film edge. In general, the liquid film width increased with the liquid injection velocity, and thicker film was measured with it, especially near the edge. From these measurement results and in comparison with the visual observations, it was found that the present sensor could measure liquid film thicknesses reliably under constant water temperature conditions.
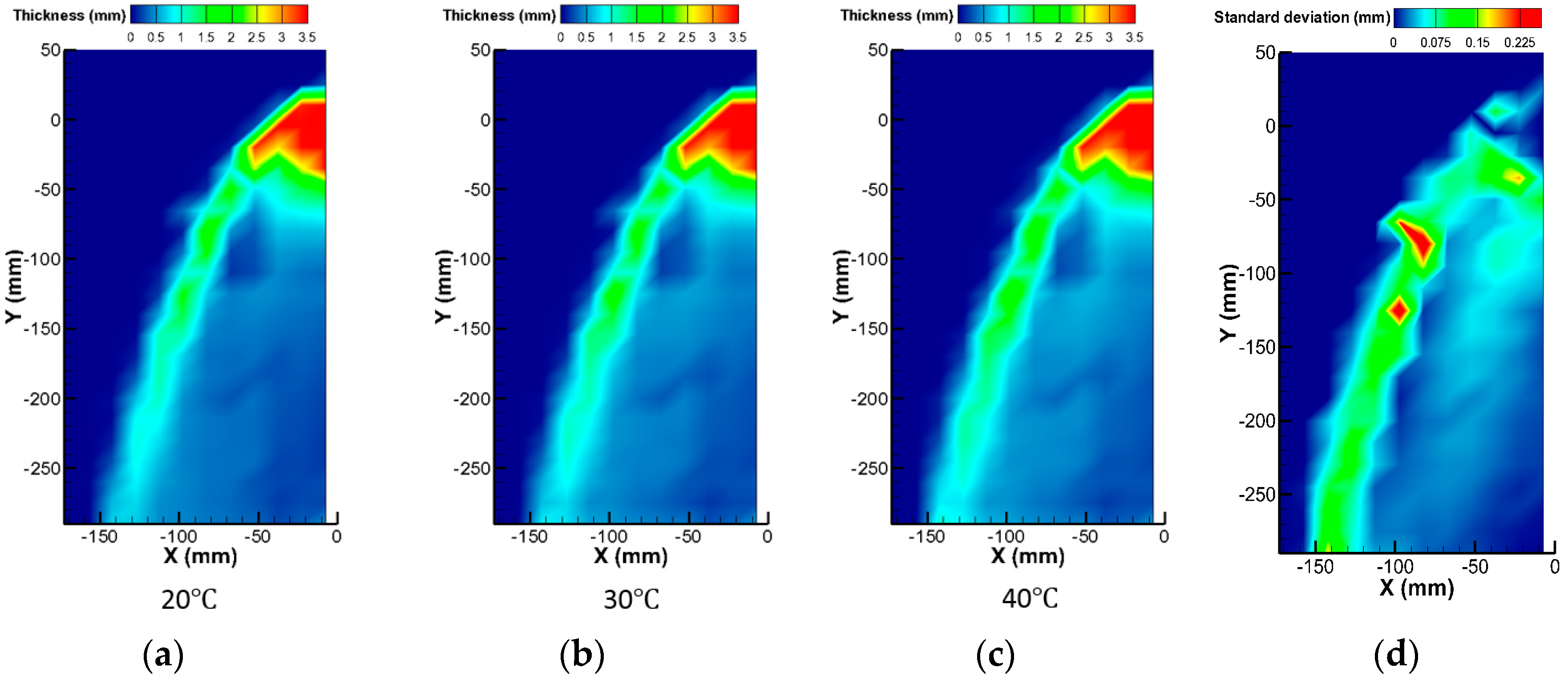
A feasibility test to evaluate the working performance of the sensor under varying temperature conditions was then conducted. The liquid injection velocity was 0.63 m/s and the water temperature was changed from 20 °C to 40 °C in 10 °C steps.
Figure 18 shows the measured liquid film thickness with three different water temperature conditions. Even with these temperature differences, a comparable liquid film thickness distribution was obtained.
Figure 18d shows the standard deviation distributions of the liquid film thickness in these three measurements. Owing to the oscillating nature of the liquid film edge, the liquid film thickness deviation was significant at the liquid film edge compared to the other regions. In particular, the location of the liquid entrainment from the film edge varied slightly depending on the experimental conditions. Consequently, the largest deviation between the measured data was observed at the positions where droplet entrainment occurred. Except for these regions, the deviation was less than approximately 0.07 mm, and the temperature compensation capability of the three-electrode liquid film sensor was confirmed with this mild temperature variation.
4. Conclusions
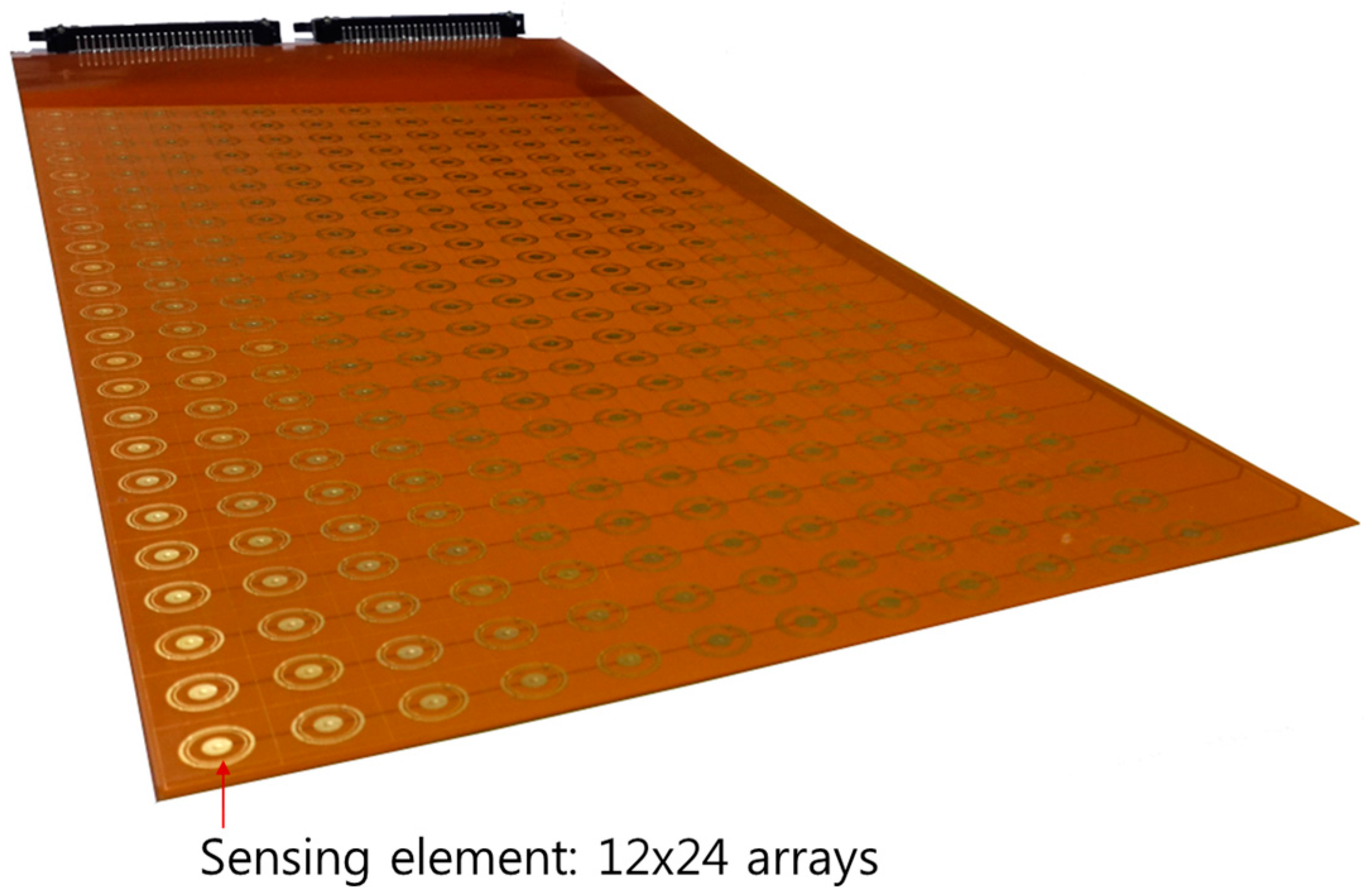
In order to confirm the feasibility of the three-electrode conductance method for liquid film thickness measurements, which is expected to be advantageous under varying temperature conditions, two prototype liquid film sensors were fabricated on an FPCB. The designs of the prototypic sensors were determined by electrical potential analyses. The calibration tests of these sensors showed that the fabricated sensors are applicable in conditions with mild temperature variances at temperatures lower than 20 °C. Subsequently, the liquid film sensor was applied to a plate duct and to a condition with a falling liquid film thickness with impingement on a wall and was measured with a 12 × 24 sensing array. The measurement results showed reasonable consistency with the visual observations, and the feasibility of the three-electrode conductance sensor was confirmed in the temperature range of 20 °C–40 °C.
However, the possible temperature variation range is limited to 20 °C in the present design and experimental setup. In order to overcome this limitation, an improvement of the calibration devices is initially required. Additional investigations are then needed to determine the cause of the unexpected temperature dependency of the current ratio using a counterpart liquid film thickness measurement sensor. Reducing the impedance of its circuitry is required as well for more accurate resolutions by enlarging the signal-to-noise ratio.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}