Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Objective 1. To test the validity of the framework for a range of fluvial settings as identified by the WFD GIGs.
- Objective 2. To compare the accuracy of the framework in hydromorphological feature identification within and between fluvial settings.
- Objective 3. To interpret the outputs from (1) and (2) in line with the WFD regulatory framework.
2. Materials and Methods
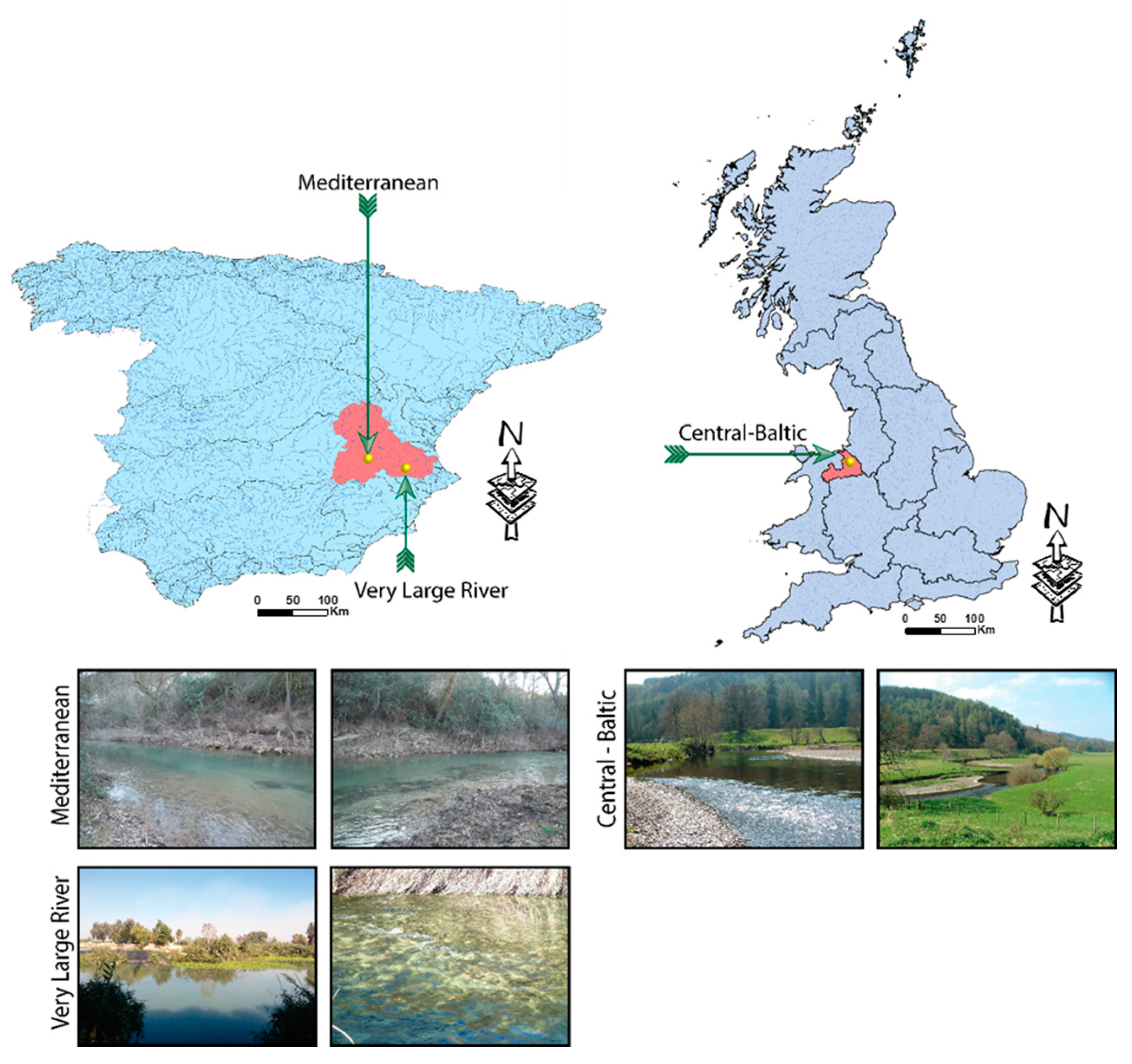
2.1. Study Sites
2.2. Selection of Hydromorphological Variables
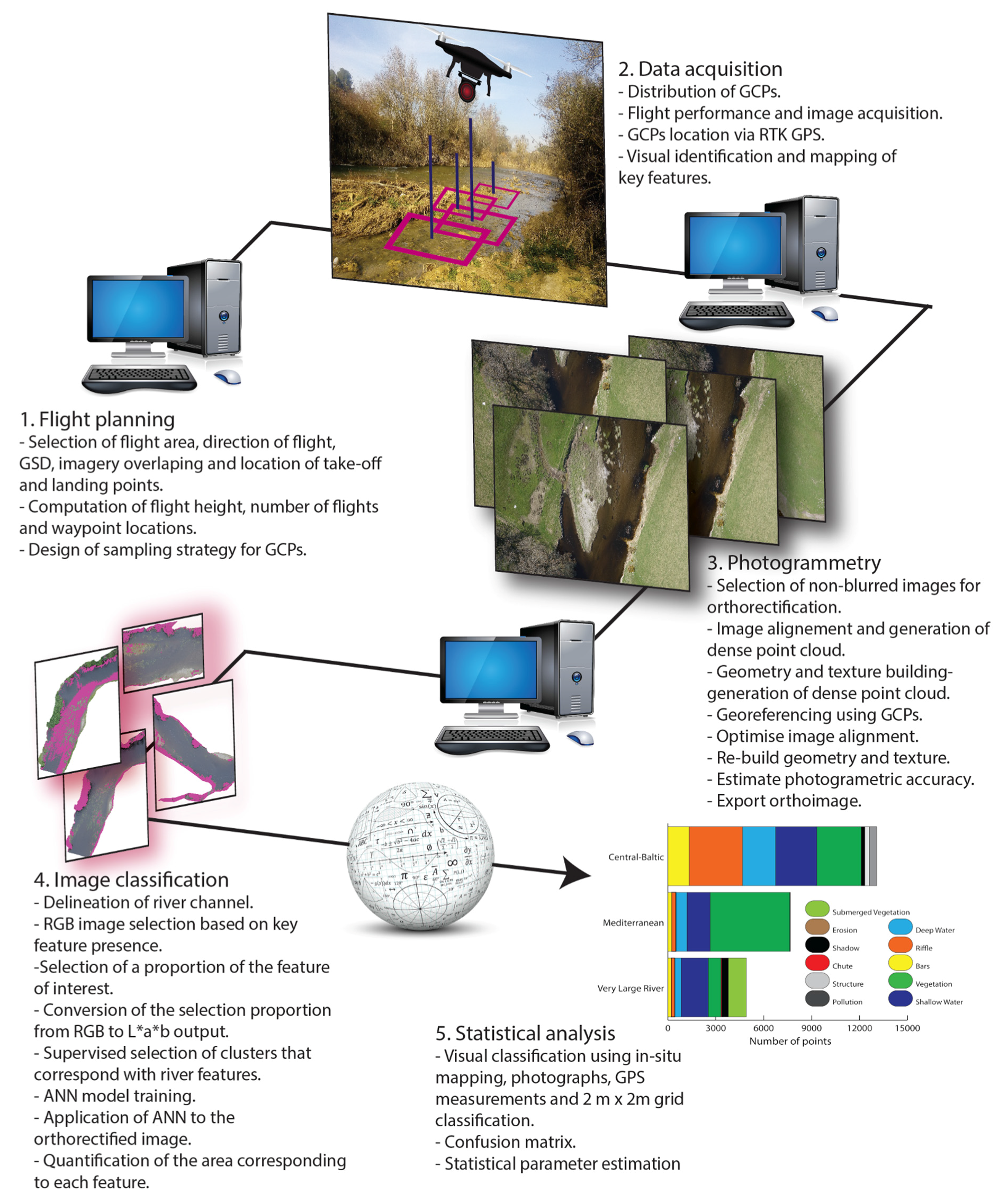
2.3. Sampling Design and Data Collection
2.4. Photogrammetry
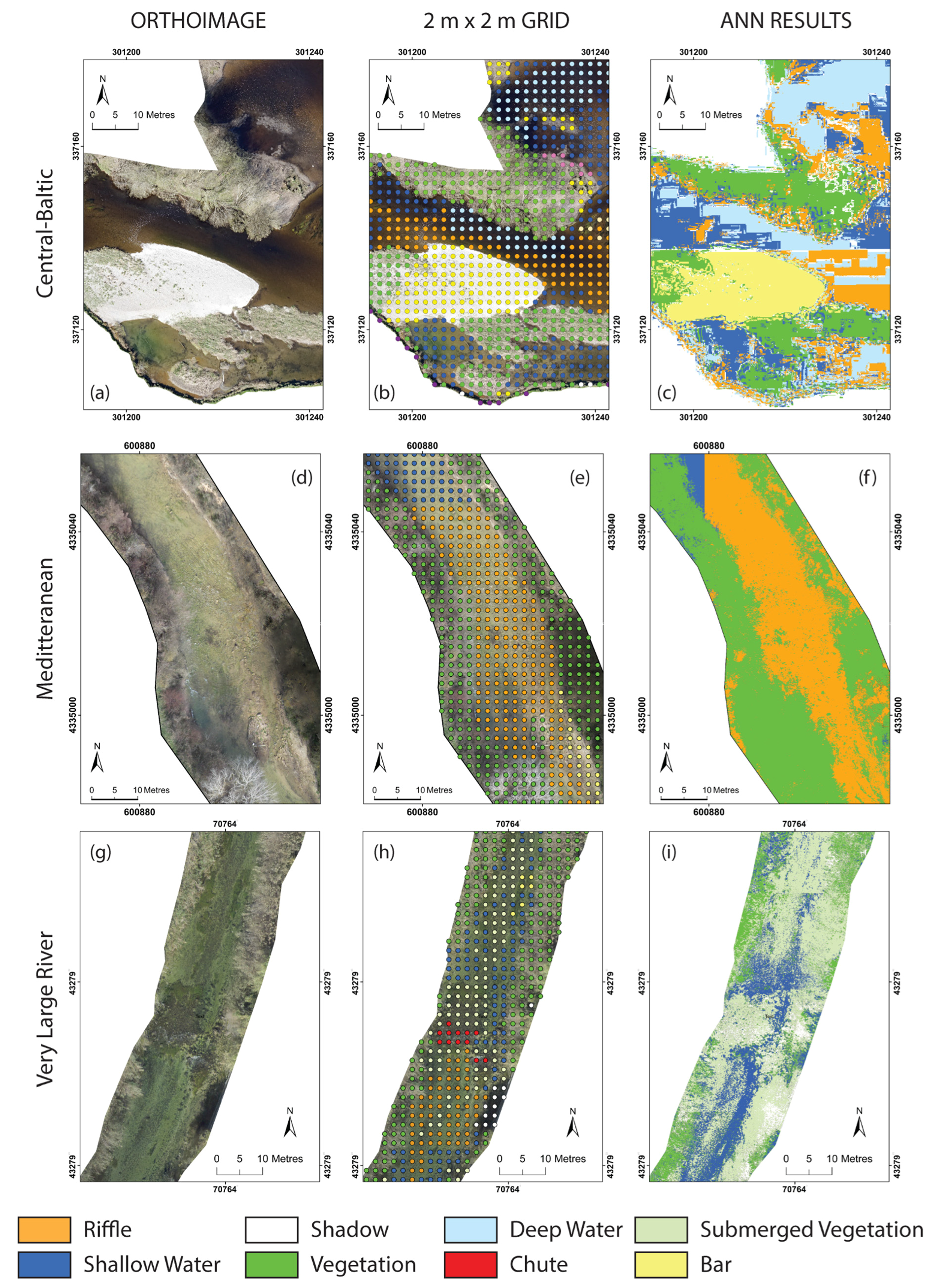
2.5. Automatic Classification
2.6. Statistical Analysis
3. Results
4. Discussion
4.1. UAV Framework Performance at the GIGs Sites
4.2. Potential Technical Improvements
4.3. Framework Output Interpretation in Line with the WFD
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References and Notes
- European Commission. Directive 2000/60/EC of the European Parliament and of the Council of 23 October 2000 establishing a framework for Community action in the field of water policy. Off. J. Eur. Union 2000, L327, 1–72. [Google Scholar]
- Belletti, B.; Rinaldi, M.; Buijse, A.D.; Gurnell, A.M.; Mosselman, E. A review of assessment methods for river hydromorphology. Environ. Earth Sci. 2014, 73, 2079–2100. [Google Scholar] [CrossRef]
- Rinaldi, M.; Belleti, B.; Van de Bund, W.; Bertoldi, W.; Gurnell, A.; Buijse, T.M.E.; Mosselman, E. Review on Eco-Hydromorphological Methods. Available online: http://www.reformrivers.eu/d-11-review-eco-hydromorphological-methods (accessed on 26 September 2017).
- Rinaldi, M.; Belletti, B.; Bussettini, M.; Comiti, F.; Golfieri, B.; Lastoria, B.; Marchese, E.; Nardi, L.; Surian, N. New tools for the hydromorphological assessment and monitoring of European streams. J. Environ. Manag. 2016, 202, 363–378. [Google Scholar] [CrossRef] [PubMed]
- Gurnell, M.; Bussettini, M.; Camenen, B.; González Del Tánago, M.; Grabowski, R.; Hendriks, D.; Henshaw, A.; Latapie, A.; Rinaldi, M. Multi-Scale Framework and Indicators of Hydromorphological Processes and Forms I. Main Report. Available online: http://www.reformrivers.eu/multi-scale-framework-and-indicators-hydromorphological-processes-and-forms-i-main-report (accessed on 26 September 2017).
- Belletti, B.; Rinaldi, M.; Bussettini, M.; Comiti, F.; Gurnell, A.M.; Mao, L.; Nardi, L.; Vezza, P. Characterising physical habitats and fluvial hydromorphology: A new system for the survey and classification of river geomorphic units. Geomorphology 2017, 283, 143–147. [Google Scholar] [CrossRef]
- Gurnell, A.M.; Rinaldi, M.; Belletti, B.; Bizzi, S.; Blamauer, B.; Braca, G.; Buijse, A.D.; Bussettini, M.; Camenen, B.; Comiti, F.; et al. A multi-scale hierarchical framework for developing understanding of river behaviour to support river management. Aquat. Sci. 2016, 78, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Rinaldi, M.; Gurnell, A.M.; Belletti, B.; Berga Cano, M.I.; Bizzi, S.; Bussettini, M.; González del Tánago, M.; Grabowski, R.; Habersak, H.; Klösch, M.; et al. Final Report on Methods, Models, Tools to Asses the Hydromorphology of Rivers. Available online: http://www.reformrivers.eu/deliverables/d62-final-report-methods-models-tools-assess-hydromorphology-rivers (accessed on 26 September 2017).
- Rinaldi, M.; Belletti, B.; Comiti, F.; Nardi, L.; Bussettini, M.; Mao, L.; Gurnell, A.M. The Geomorphic Unit Survey and Classification System (GUS). Available online: http://www.reformrivers.eu/geomorphic-units-survey-and-classification-system-gus (accessed on 26 September 2017).
- Klösch, M.; Habersack, H. The Hydromorphological Evaluation Tool (HYMET). Geomorphology 2017, 291, 143–158. [Google Scholar] [CrossRef]
- Environment Agency. River Habitat Survey in Britain and Ireland; Environment Agency: Bristol, UK, 2003.
- Raven, P.J.; Holmes, N.T.H.; Charrier, P.; Dawson, F.H.; Naura, M.; Boon, P.J. Towards a harmonized approach for hydromorphological assessment of rivers in Europe: A qualitative comparison of three survey methods. Aquat. Conserv. Mar. Freshw. Ecosyst. 2002, 12, 405–424. [Google Scholar] [CrossRef]
- Raven, P.J.; Holmes, N.T.H.; Vaughan, I.P.; Dawson, F.H.; Scarlett, P. Benchmarking habitat quality: Observations using River Habitat Survey on near-natural streams and rivers in northern and western Europe. Aquat. Conserv. Mar. Freshw. Ecosyst. 2010, 20, S13–S30. [Google Scholar] [CrossRef]
- Scheifhacken, N.; Haase, U.; Gram-Radu, L.; Kozovyi, R.; Berendonk, T.U. How to assess hydromorphology? A comparison of Ukrainian and German approaches. Environ. Earth Sci. 2012, 65, 1483–1499. [Google Scholar] [CrossRef]
- Benjankar, R.; Koenig, F.; Tonina, D. Comparison of hydromorphological assessment methods: Application to the Boise River, USA. J. Hydrol. 2013, 492, 128–138. [Google Scholar] [CrossRef]
- Langhans, S.D.; Lienert, J.; Schuwirth, N.; Reichert, P. How to make river assessments comparable: A demonstration for hydromorphology. Ecol. Indic. 2013, 32, 264–275. [Google Scholar] [CrossRef]
- Fernández, D.; Barquín, J.; Raven, P.J. A review of river habitat characterisation methods: Indices vs. characterisation protocols. Limnetica 2011, 30, 217–234. [Google Scholar]
- European Commission. Commission Decision of 30 October 2008 establishing, pursuant to Directive 2000/60/EC of the European Parliament and the Council, the values of the Member State monitoring system classifications as a result of the intercalibration exercise 2008/915/EC. Off. J. Eur. Union 2008, L332, 20–44. [Google Scholar]
- Poikane, S.; Zampoukas, N.; Borja, A.; Davies, S.P.; van de Bund, W.; Birk, S. Intercalibration of aquatic ecological assessment methods in the European Union: Lessons learned and way forward. Environ. Sci. Policy 2014, 44, 237–246. [Google Scholar] [CrossRef]
- Poikane, S.; Birk, S.; Böhmer, J.; Carvalho, L.; de Hoyos, C.; Gassner, H.; Hellsten, S.; Kelly, M.; Lyche Solheim, A.; Olin, M.; et al. A hitchhiker’s guide to European lake ecological assessment and intercalibration. Ecol. Indic. 2015, 52, 533–544. [Google Scholar] [CrossRef]
- Poikane, S.; Johnson, R.K.; Sandin, L.; Schartau, A.K.; Solimini, A.G.; Urbanič, G.; Arbačiauskas, K.; Aroviita, J.; Gabriels, W.; Miler, O.; et al. Benthic macroinvertebrates in lake ecological assessment: A review of methods, intercalibration and practical recommendations. Sci. Total Environ. 2016, 543, 123–134. [Google Scholar] [CrossRef] [PubMed]
- Bizzi, S.; Demarchi, L.; Grabowski, R.C.; Weissteiner, C.J.; Van de Bund, W. The use of remote sensing to characterise hydromorphological properties of European rivers. Aquat. Sci. 2016, 78, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Gurnell, A.M.; Rinaldi, M.; Buijse, A.D.; Brierley, G.; Piégay, H. Hydromorphological frameworks: Emerging trajectories. Aquat. Sci. 2016, 78, 135–138. [Google Scholar] [CrossRef]
- Martínez-Fernández, V.; Solana-Gutiérrez, J.; González del Tánago, M.; García de Jalón, D. Automatic procedures for river reach delineation: Univariate and multivariate approaches in a fluvial context. Geomorphology 2016, 253, 38–47. [Google Scholar] [CrossRef]
- Demarchi, L.; Bizzi, S.; Piégay, H. Hierarchical Object-Based Mapping of Riverscape Units and in-Stream Mesohabitats Using LiDAR and VHR Imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Rivas Casado, M.; Ballesteros González, R.; Wright, R.; Bellamy, P. Quantifying the effect of aerial imagery resolution in automated hydromorphological river characterisation. Remote Sens. 2016, 8, 650. [Google Scholar] [CrossRef]
- Rivas Casado, M.; Ballesteros González, R.; Kriechbaumer, T.; Veal, A. Automated identification of river hydromorphological features using UAV high resolution aerial imagery. Sensors 2015, 15, 27969–27989. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Woodget, A.S.; Visser, F.; Maddock, I.P.; Carbonneau, P.E. The accuracy and reliability of traditional surface flow type mapping: Is it time for a new method of characterizing physical river habitat? River Res. Appl. 2016, 39, 1902–1914. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- Woodget, A.; Austrums, R.; Maddock, I.P.; Habit, E. Drones and digital photogrammetry: From classifications to continuums for monitoring river habitat and hydromorphology. Wiley Interdiscip. Rev. Water 2017, 4, e1222. [Google Scholar] [CrossRef]
- DeBell, L.; Anderson, K.; Brazier, R.E.; King, N.; Jones, L. Water resource management at catchment scales using lightweight UAVs: Current capabilities and future perspectives. J. Unmanned Veh. Syst. 2016, 4, 7–30. [Google Scholar] [CrossRef]
- Environment Agency. Catchment Data Explorer. Available online: http://environment.data.gov.uk/catchment-planning/ManagementCatchment/3024 (accessed on 30 December 2016).
- Ministerio de Agricultura Alimentación y Medio Ambiente. Confederación Hidrográfica del Júcar. Plan Hidrológico de la Demarcación Hidrográfica del Júcar. Available online: http://www.chj.es/es-es/medioambiente/planificacionhidrologica/Paginas/PHC-2015-2021-Plan-Hidrologico-cuenca.aspx (accessed on 5 March 2017).
- Ministerio de Agricultura Alimentación y Medio Ambiente. Real Decreto 1/2016, de 8 de enero, por el que se aprueba la revisión de los Planes Hidrológicos de las demarcaciones hidrográficas del Cantábrico Occidental, Guadalquivir, Ceuta, Melilla, Segura y Júcar, y de la parte española de las demarcaciones hidrográficas del Cantábrico Oriental, Miño-Sil, Duero, Tajo, Guadiana y Ebro. Boletín Of. Estado 2016, 16, 2972–4301. [Google Scholar]
- Water Watch Wales Map Gallery. WFD Cycle 2 Rivers and Water-Bodies in Wales. Available online: https://nrw.maps.arcgis.com/apps/webappviewer/index.html?id=2176397a06d64731af8b21fd69a143f6 (accessed on 8 March 2017).
- Environment Agency. Technical Assessment Method (Rivers): Morphological Alteration/Identification of pHMWBs and pAWBs (Drainage Channels).
- Ministerio de Agricultura Alimentación y Medio Rural y Marino. Orden ARM/2656/2008, de 10 de septiembre, por la que se aprueba la instruccion y planificacion hidrologica. Boletín Of. Estado 2008, 229, 38472–38582. [Google Scholar]
- Ministerio de Agricultura Alimentación y Medio Ambiente Real Decreto 817/2015, de 11 de septiembre, por el que se establecen los criterios de seguimiento y evaluacion del estado de las aguas superficiales y las normas de calidad ambiental. Boletín Of. Estado 2015, 219, 80582–80677.
- Ministerio de Alimentación Agricultura y Medio Ambiente. Confederación Hidrográfica del Júcar. Plan hidrológico de la demarcación hidrográfica del Júcar. Memoria-Anejo 1. Designación de Masas de Agua Artificiales y muy Modificadas. Available online: http://www.chj.es/descargas/ProyectosOPH/Consulta%20publica/Anejos/PHJ_Anejo01_MAMM.pdf (accessed on 5 March 2017).
- Ministerio de Alimentación Agricultura y Medio Ambiente. Confederación Hidrográfica del Júcar. Plan hidrológico de la demarcación hidrográfica del Júcar. Memoria-Anejo 12. Evaluación del estado de las masas de agua superficiales y subterránea. Available online: http://www.chj.es/es-es/medioambiente/planificacionhidrologica/Paginas/PHC-2015-2021-Plan-Hidrologico-cuenca.aspx (accessed on 5 March 2017).
- Ministerio de Alimentación Agricultura y Medio Ambiente; Confederación Hidrográfica del Ebro. Protocolos de muestreo y análisis para indicadores hidromorfológicos. In Metodología para establecimiento del estado ecológico según la Directiva Marco del Agua; Ministerio de Alimentación Agricultura y Medio Ambiente: Madrid, Spain, 2013. [Google Scholar]
- Frissell, C.A.; Liss, W.J.; Warren, C.E.; Hurley, M.D. A Hierarchical Framework for Stream Habitat Classification: Viewing Streams in a Watershed Context. Environ. Manag. 1986, 10, 199–214. [Google Scholar] [CrossRef]
- The National Registry for Adoption (NRFA). Station Mean Flow Data. Available online: http://nrfa.ceh.ac.uk/data/station/meanflow/67001 (accessed on 31 December 2016).
- Ministerio de Agricultural y Pesca Alimentación y Medio Ambiente. Sistema de información agroclimática para el regadío. Available online: http://eportal.mapama.gob.es/websiar/SeleccionParametrosMap.aspx?dst=1 (accessed on 1 May 2017).
- Ministerio de Alimentación Agricultura y Medio Ambiente. Confederación Hidrográfica del Júcar. Plan hidrológico de la demarcación hidrográfica del Júcar. Memoria-Anejo 5. Régimen de caudales ecológicos. Available online: http://www.chj.es/descargas/ProyectosOPH/Consulta%20publica/Anejos/PHJ_Anejo05_QEco.pdf (accessed on 5 March 2017).
- Ribeiro-Gomes, K.; Hernández-Lopez, D.; Ballesteros González, R.; Moreno, M.A. Approximate georeferencing and automatic blurred image detection to reduce the costs of UAV use in environmental and agricultural applications. Biosyst. Eng. 2016, 151, 308–327. [Google Scholar] [CrossRef]
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Applications of georeferenced high-resolution images obtained with unmanned aerial vehicles. Part I: Description of image acquisition and processing. Precis. Agric. 2014, 15, 579–592. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-Effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Göktoǧan, A.H.; Sukkarieh, S.; Bryson, M.; Randle, J.; Lupton, T.; Hung, C. A rotary-wing unmanned air vehicle for aquatic weed surveillance and management. J. Intell. Robot. Syst. Theory Appl. 2010, 57, 467. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Poppe, M.; Kail, J.; Aroviita, J.; Stelmaszczyk, M.; Giełczewski, M.; Muhar, S. Assessing restoration effects on hydromorphology in European mid-sized rivers by key hydromorphological parameters. Hydrobiologia 2016, 769, 21–40. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geographical Intercalibration Group | |||
|---|---|---|---|
| Descriptor | Central-Baltic | Mediterranean | VLR |
| River | Dee | Jucar | Jucar |
| Country | UK | Spain | Spain |
| WFD D | HMWB 1 | Natural 2 | Natural 2 |
| WB ID | GB111067052240 1 | ES080MSPF18.12 2 | ES080MSPF18.28 2 |
| WB L (km) | 27.73 1 | 21.89 2 | 4.54 2 |
| RL (km) | 1.4 | 1.2 | 0.96 |
| RW (m) | 32.62 | 11.09 | 18.78 |
| Area (m2) | 46,385 | 30,859 | 21,784 |
| Feature | Description | |
|---|---|---|
| Substrate | Side Bar | Consolidated river bed material along the margins of a reach which is exposed at low flow. |
| Erosion | Predominantly derived from eroding cliffs which are vertical or undercut banks, with a minimum height of 0.5 m and less than 50% vegetation cover. | |
| Water | Riffle | Area within the river channel presenting shallow and fast-flowing water. Generally over gravel, pebble or cobble substrate with disturbed (rippled) water surface. |
| Deep Water (Glides and Pools) | Deep glides: deep homogeneous areas with visible flow movement along the surface. Pools: localized deeper parts of the channel created by scouring. Both features present fine substrate, non-turbulent and slow flow. | |
| Shallow Water | Includes any slow flowing and non-turbulent areas. | |
| Chute | Low curving fall in contact with substrate. | |
| Major impacts (pollution) | Indicators of water quality pollution (e.g., accumulation of white/sluggish foam, tipping, litter, sewage, abstraction). | |
| Vegetation | Tree | Trees obscuring the aerial view of the river channel. The distinction between perennial and tree in dormant period was made when possible. |
| Vegetated Side Bar | Side bar presenting plant cover in more than 50% of its surface. | |
| Vegetated Bank | Banks not affected by erosion. When possible the difference was made between grass and shrub cover. | |
| Submerged Free Floating Vegetation | Plants rooted on the river bed with floating leaves. | |
| Emergent Free Floating Vegetation | Plants rooted on the river bed with floating leaves on the water surface. | |
| Grass | Present along the banks and floodplain as a result of intense grazing regime. | |
| Nuisance plant specie | Invasive species covering a large proportion of the banks or river channel. | |
| Shadows | Extent of direct, overhead, tree canopy shade. Includes shading of channel and overhanging vegetation. | |
| Artificial | Any weir, sluices, culverts, bridges, fords, deflectors or equivalent that are not underwater. | |
| GIG | Central-Baltic | Mediterranean | VLR |
|---|---|---|---|
| GCPs | 60 | 20 | 8 |
| GSD | 2.5 | 2.17 | 2.21 |
| Flight altitude | 100 | 77.6 | 120 |
| No. Flights | 4 | 2 | 2 |
| Platform | Falcon 8 Trinity | IRIS9+ | md4-1000 |
| Camera | Sony Alpha 6000 1 | Canon IXUS 115 HS 2 | Sony Alpha ILCE-5100 1 |
| Sensor type | CMOS APS-C type ExmorTM HD 1 | BCI-CMOS 2 | CMOS APS-C type ExmorTM 1 |
| Mill. effect. pix. | 24.3 | 12.1 | 24.3 |
| Pixel size (mm) | 0.00391 | 0.02169 | 0.02214 |
| FLA (mm) | 20 | 5 | 20 |
| PT (h) | 12 | 12 | 12 |
| GIG | Central-Baltic 1 | Mediterranean 2,3 | VLR 2,3 |
|---|---|---|---|
| Date | 21 Apirl 2015 | 28 January 2016 | 24 November 2016 |
| Discharge (m3 s−1) | 4.8 | 2.5 | 3.4 |
| Percentile Q (m3 s−1) | Q80 | Q80 | Q80 |
| Surface wind | 1 m s−1–3 m s−1 | 0.46 m s−1 | 0.93 m s−1 |
| Wind direction | 60–350° | 307° | 293.5° |
| GIG | Central-Baltic | Mediterranean | VLR |
|---|---|---|---|
| Total GCP error in X (cm) | 1.1 | 1.06 | 2.65 |
| Total GCP error in Y (cm) | 1.0 | 1.49 | 2.52 |
| Total GCP error in Z (cm) | 1.6 | 1.42 | 1.01 |
| N | 13,085 | 7716 | 4915 |
| AC (%) | 81 | 71 | 50 |
| Feature | TPR | TNR | FPR | FNR |
|---|---|---|---|---|
| Central-Baltic | ||||
| Side bar | 0.822 | 0.765 | 0.000 | 0.178 |
| Erosion | 0.077 | 0.786 | 0.001 | 0.923 |
| Riffle | 0.814 | 0.756 | 0.060 | 0.074 |
| Deep water | 0.926 | 0.741 | 0.008 | 0.074 |
| Shallow water | 0.588 | 0.815 | 0.051 | 0.412 |
| Shadow | 0.818 | 0.770 | 0.073 | 0.182 |
| Vegetation | 0.810 | 0.758 | 0.081 | 0.192 |
| Mediterranean | ||||
| Side bar | 0.758 | 0.706 | 0.000 | 0.241 |
| Riffle | 0.736 | 0.707 | 0.014 | 0.263 |
| Deep water | 0.550 | 0.724 | 0.044 | 0.449 |
| Shallow water | 0.515 | 0.753 | 0.093 | 0.484 |
| Vegetation | 0.785 | 0.565 | 0.299 | 0.214 |
| Pollution | 0.500 | 0.708 | 0.001 | 0.500 |
| Structure | 0.000 | 0.709 | 0.000 | 1.000 |
| Chute | 0.000 | 0.708 | 0.000 | 1.000 |
| Very Large Rivers | ||||
| Side bar | 0.000 | 0.524 | 0.002 | 1.000 |
| Riffle | 0.000 | 0.527 | 0.000 | 1.000 |
| Deep water | 0.665 | 0.488 | 0.034 | 0.334 |
| Shallow water | 0.555 | 0.475 | 0.136 | 0.444 |
| Shadow | 0.531 | 0.500 | 0.073 | 0.468 |
| Vegetation | 0.743 | 0.481 | 0.364 | 0.256 |
| Structure | 0.000 | 0.503 | 0.000 | 1.000 |
| Chute | 0.283 | 0.505 | 0.003 | 0.716 |
| ANN | SB | RI | ER | DW | SW | CH | SH | VG | PL | ST | GE | Total | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Visual | |||||||||||||
| Central-Baltic | |||||||||||||
| SB | 1097 | 8 | - | - | 2 | - | 10 | 214 | - | - | 3 | 1334 | |
| RI | - | 2717 | 1 | - | 318 | - | 219 | 76 | - | - | 8 | 3339 | |
| ER | - | 13 | 22 | 1 | 3 | - | 10 | 238 | - | - | - | 287 | |
| DW | - | 60 | - | 1927 | 54 | - | 8 | 29 | - | - | 4 | 2082 | |
| SW | - | 262 | - | 80 | 1514 | - | 493 | 217 | - | - | 7 | 2573 | |
| CH | - | - | - | - | - | - | - | - | - | - | - | - | |
| SH | - | - | 4 | - | 5 | - | 180 | 31 | - | - | - | 220 | |
| VG | - | 245 | 11 | 7 | 156 | - | 197 | 2129 | - | - | 9 | 3250 | |
| PL | - | - | - | - | - | - | - | - | - | - | - | - | |
| ST | - | - | - | - | - | - | - | - | - | - | - | - | |
| Total | 1097 | 3305 | 38 | 2015 | 2052 | - | 1117 | 3430 | - | - | 31 | 13,085 | |
| Meditteranean | |||||||||||||
| SB | 176 | 19 | - | - | 16 | - | - | - | - | - | 21 | 232 | |
| RI | - | 198 | - | - | 1 | - | - | 65 | - | - | 5 | 269 | |
| ER | - | - | - | - | - | - | - | - | - | - | - | - | |
| DW | - | - | - | 385 | 77 | - | - | 188 | - | - | 47 | 697 | |
| SW | - | 25 | - | 59 | 752 | - | - | 541 | - | - | 71 | 1448 | |
| CH | - | - | - | - | 2 | - | - | 1 | - | - | - | 3 | |
| SH | - | - | - | - | - | - | - | - | - | - | - | - | |
| VG | - | 61 | - | 248 | 495 | - | - | 3919 | 14 | - | 253 | 4990 | |
| PL | - | - | - | - | - | - | - | 5 | 8 | - | 3 | 16 | |
| ST | - | - | - | - | - | - | - | 1 | 1 | - | 8 | 10 | |
| Total | 176 | 303 | 0 | 692 | 1343 | - | - | 4720 | 23 | - | 408 | 7665 | |
| Very Large River | |||||||||||||
| SB | - | - | - | - | 49 | - | 5 | 150 | - | - | 22 | 226 | |
| RI | - | - | - | 104 | 75 | 1 | 1 | 44 | - | - | 5 | 230 | |
| ER | - | - | - | - | - | - | - | - | - | - | - | - | |
| DW | - | - | - | 268 | 4 | - | 12 | 119 | - | - | 25 | 428 | |
| SW | 7 | - | - | 3 | 942 | 9 | 137 | 597 | - | - | 116 | 1811 | |
| CH | - | - | - | 12 | - | 15 | 4 | 22 | - | - | 50 | 103 | |
| SH | - | - | - | 1 | 36 | - | 214 | 152 | - | - | 402 | 805 | |
| VG | 6 | - | - | 35 | 276 | 5 | 171 | 1431 | - | - | 551 | 2475 | |
| PL | - | - | - | - | - | - | - | - | - | - | - | - | |
| ST | - | - | - | - | - | - | 3 | 5 | - | - | 1 | 9 | |
| Total | 13 | - | - | 423 | 1382 | 30 | 547 | 2520 | - | - | 1172 | 6087 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivas Casado, M.; González, R.B.; Ortega, J.F.; Leinster, P.; Wright, R. Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization. Sensors 2017, 17, 2210. https://doi.org/10.3390/s17102210
Rivas Casado M, González RB, Ortega JF, Leinster P, Wright R. Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization. Sensors. 2017; 17(10):2210. https://doi.org/10.3390/s17102210
Chicago/Turabian StyleRivas Casado, Mónica, Rocío Ballesteros González, José Fernando Ortega, Paul Leinster, and Ros Wright. 2017. "Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization" Sensors 17, no. 10: 2210. https://doi.org/10.3390/s17102210
APA StyleRivas Casado, M., González, R. B., Ortega, J. F., Leinster, P., & Wright, R. (2017). Towards a Transferable UAV-Based Framework for River Hydromorphological Characterization. Sensors, 17(10), 2210. https://doi.org/10.3390/s17102210