Energy Neutral Wireless Bolt for Safety Critical Fastening



Abstract
:1. Introduction
- Generate its own energy
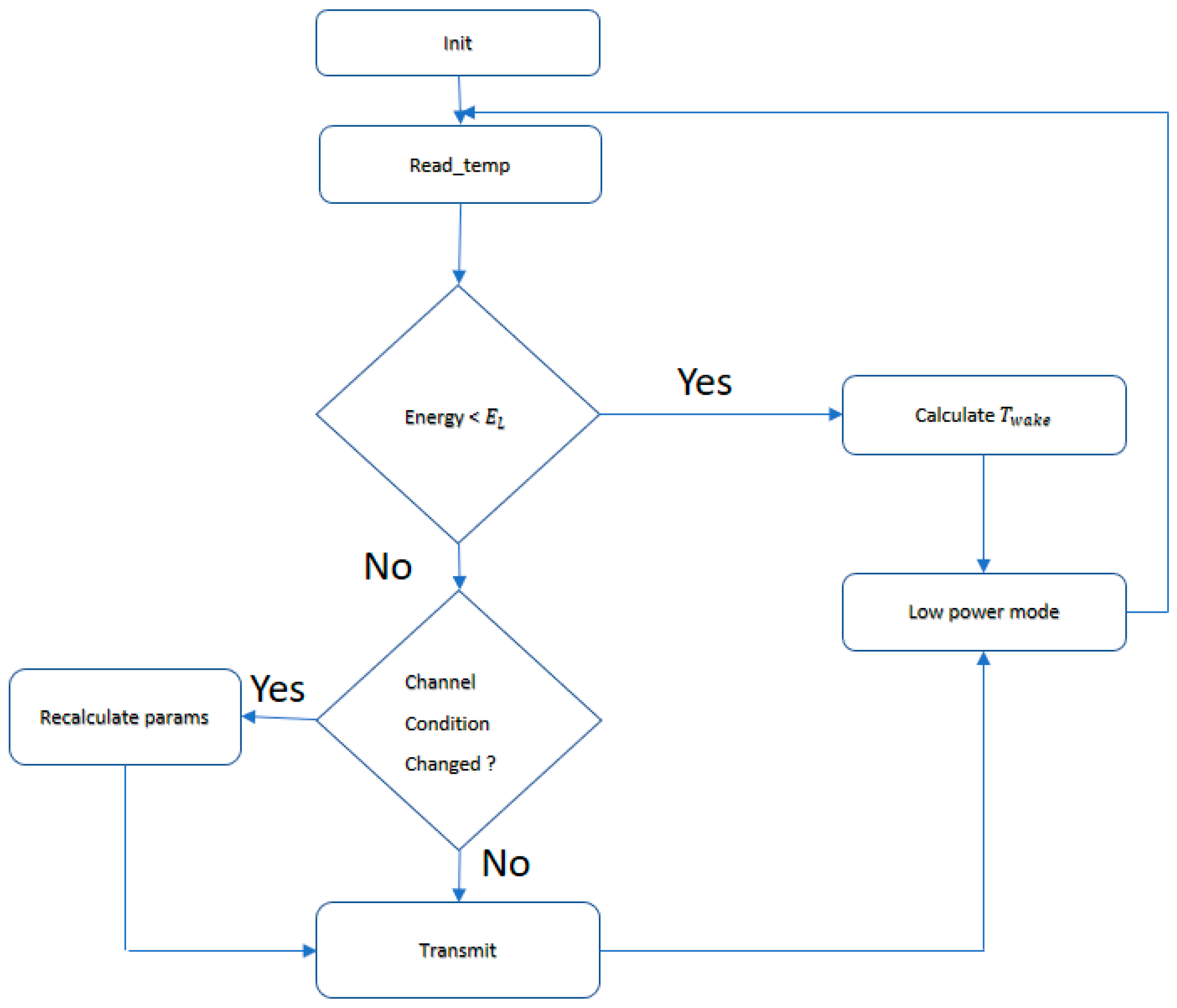
- Monitor available energy before transmission and postpone transmission if available energy is below a threshold
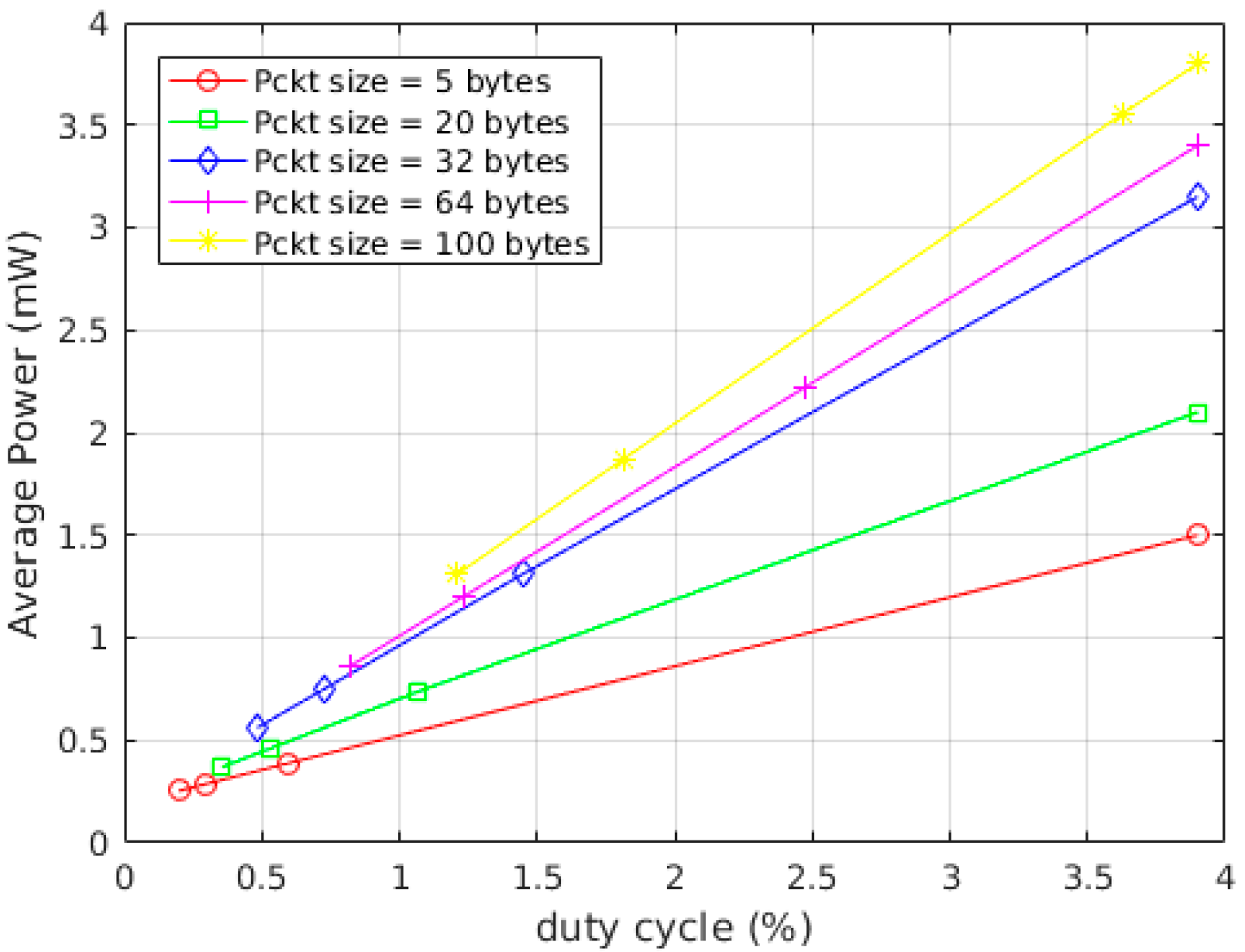
- Dynamically adjust its duty cycle (CPU wakeup frequency) based on available energy from TEG
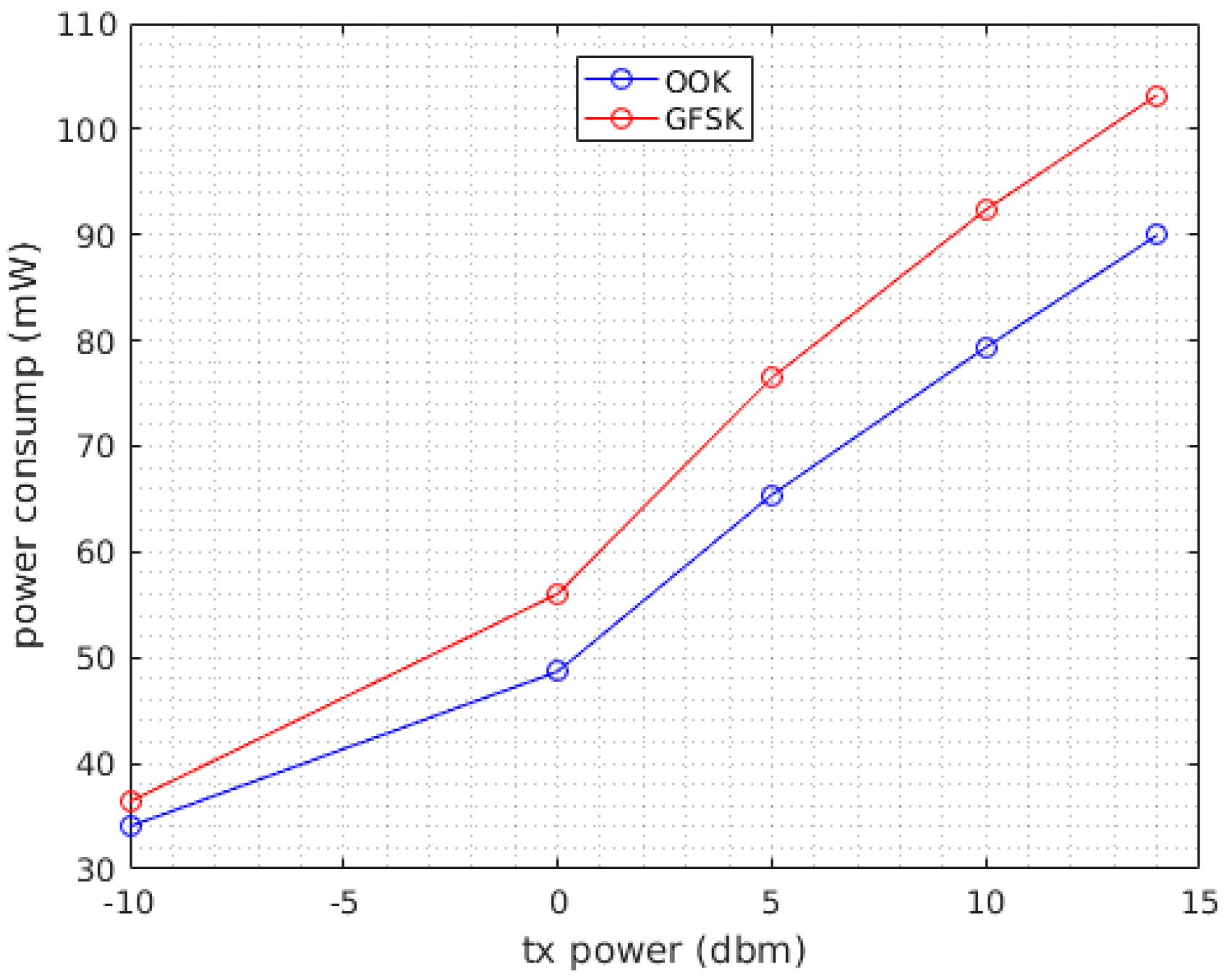
- Dynamically adjust radio transmission power (above a certain threshold) based on available energy and environmental conditions
- Stay alive for as long as possible
2. Related Work
3. Method and Approach
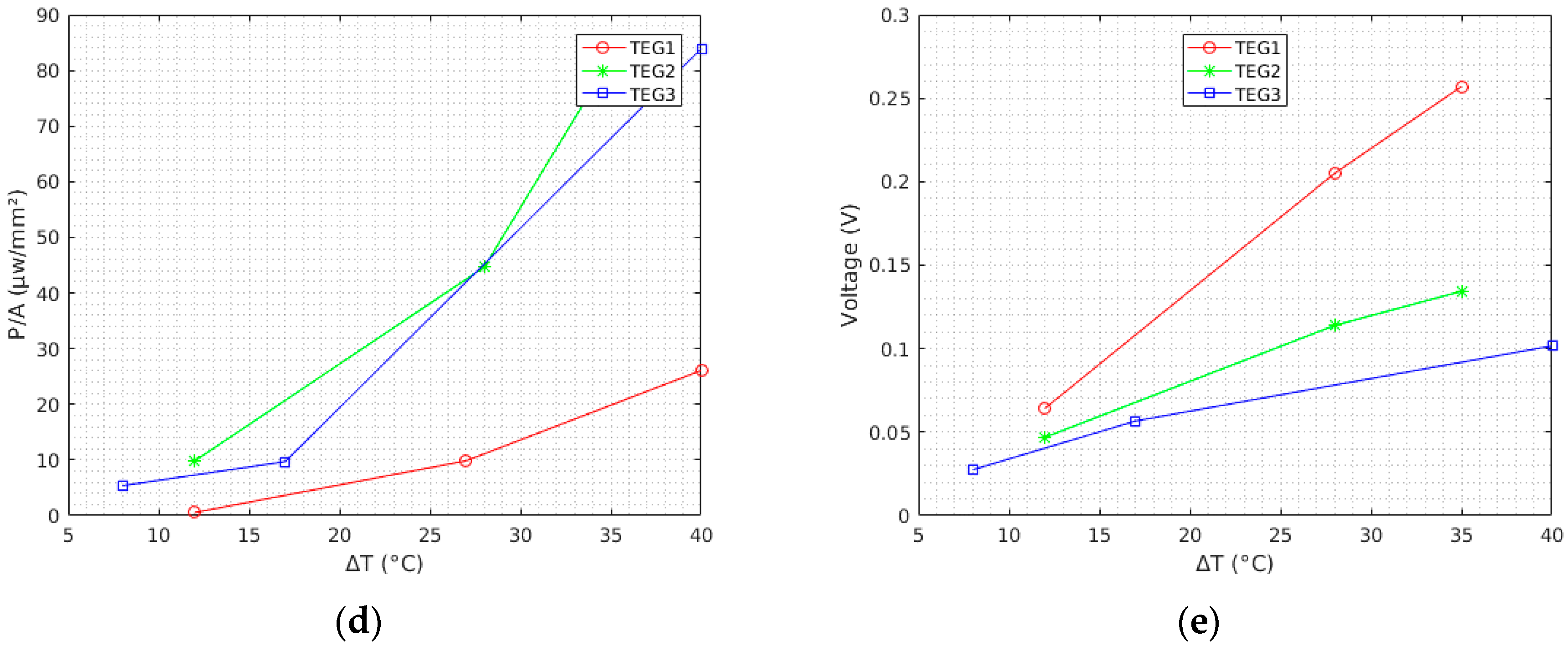
3.1. Characterization of TEGs
3.2. Characterization of DC-DC Converters
3.3. Measuring the Power Requirements of the System
4. Results and Discussion
4.1. Results from the Characterization of TEGs
4.2. Results from the Characterization of DC-DC Converters
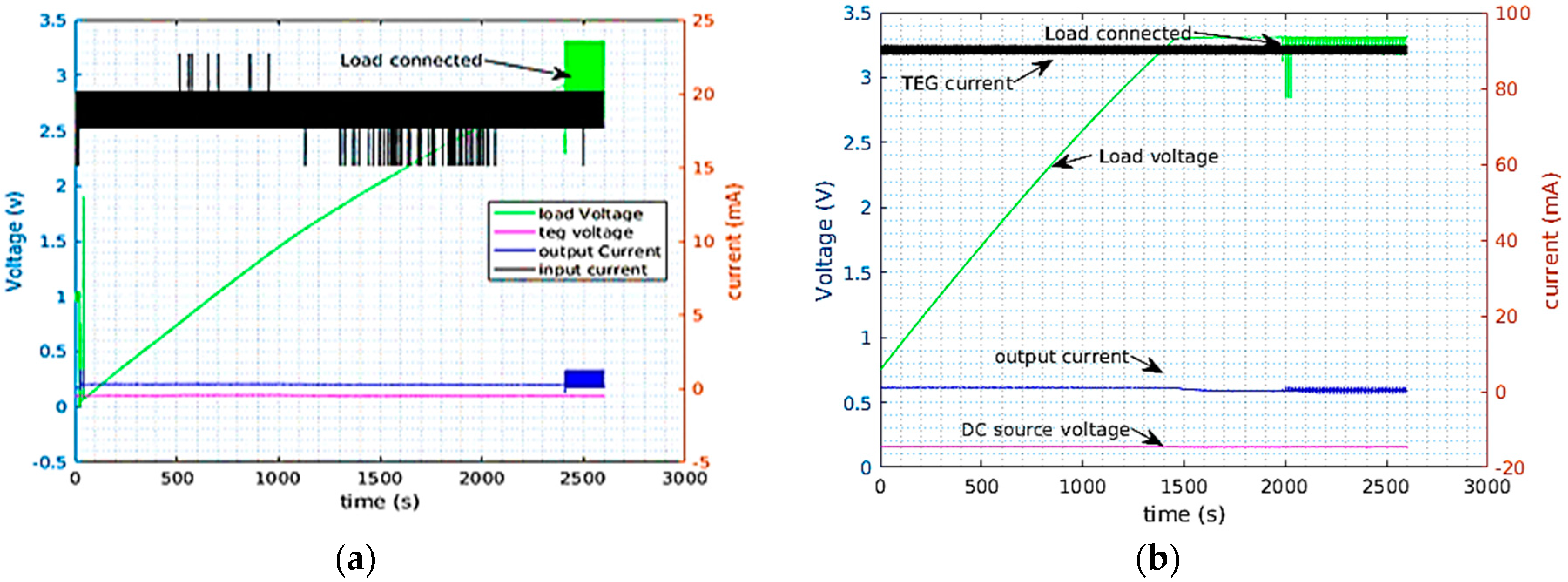
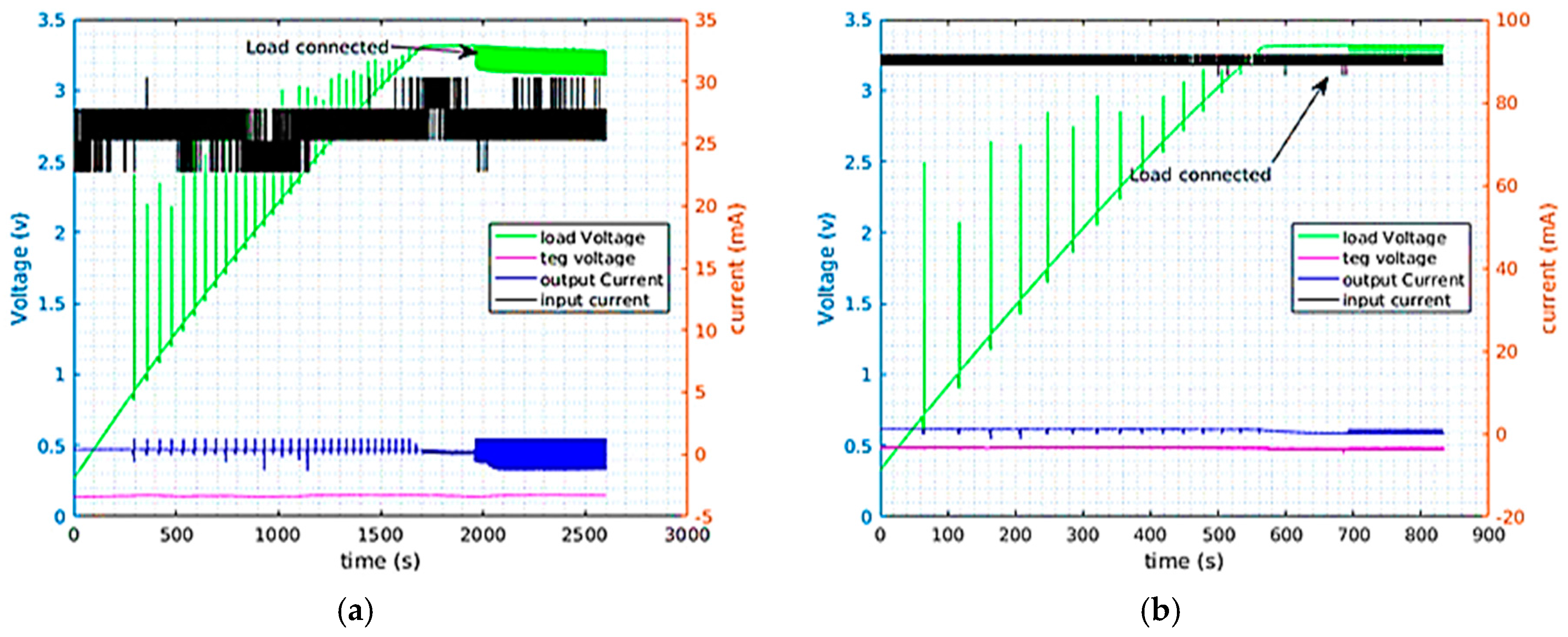
4.3. Results from the Characterization of the System
4.4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Metal Properties. Available online: https://depts.washington.edu/matseed/mse_resources/Webpage/Metals/metalproperty.htm (accessed on 25 September 2017).
- DTI SmartBolts. Available online: http://www.smartbolts.com/dti/ (accessed on 25 September 2017).
- Popular Mechanics. This Bolt Is the Key to GM’s High-Tech Assembly Line. Available online: http://www.popularmechanics.com/cars/a9959/this-bolt-is-the-key-to-gms-high-tech-assembly-line-16324897/ (accessed on 25 September 2017).
- Farella, E.; Pieracci, A.; Brunelli, D.; Benini, L.; Riccó, B.; Acquaviva, A. Design and implementation of WiMoCA node for a body area wireless sensor network. In Proceedings of the Systems Communications, Montreal, QC, Canada, 14–17 August 2005; pp. 342–347. [Google Scholar]
- Li, S.; Yao, X.; Fu, J. Research on a power management system for thermoelectric generators to drive wireless sensors on a spindle unit. Sensors 2014, 14, 12701–12714. [Google Scholar] [CrossRef] [PubMed]
- Hou, L.; Tan, S. A preliminary study of thermal energy harvesting for industrial wireless sensor networks. In Proceedings of the 2016 10th International Conference on Sensing Technology (ICST), Nanjing, China, 11–13 November 2016; pp. 1–5. [Google Scholar]
- Vom Boegel, G.; Meyer, F.; Kemmerling, M. Wireless Sensor System for Industrial Applications Powered by Thermoelectric Generator. In Proceedings of the 2014 European Conference on Smart Objects, Systems and Technologies (Smart SysTech), Dortmund, Germany, 1–2 July 2014; pp. 1–5. [Google Scholar]
- Toh, T.T.; Wright, S.W.; Kiziroglou, M.E.; Mitcheson, P.D.; Yeatman, E.M. A dual polarity, cold-starting interface circuit for heat storage energy harvesters. Sens. Actuators A Phys. 2014, 211, 38–44. [Google Scholar] [CrossRef]
- Dilhac, J.M.; Monthéard, R.; Bafleur, M.; Boitier, V.; Durand-Estèbe, P.; Tounsi, P. Implementation of thermoelectric generators in airliners for powering battery-free wireless sensor networks. J. Electron. Mater. 2014, 43, 2444. [Google Scholar] [CrossRef]
- Jo, S.E.; Kim, M.K.; Kim, M.S.; Kim, Y.J. Flexible thermoelectric generator for human body heat energy harvesting. Electron. Lett. 2012, 48, 1013–1015. [Google Scholar] [CrossRef]
- Yang, M.Z.; Wu, C.C.; Dai, C.L.; Tsai, W.J. Energy harvesting thermoelectric generators manufactured using the complementary metal oxide semiconductor process. Sensors 2013, 13, 2359–2367. [Google Scholar] [CrossRef] [PubMed]
- Pasold, G.; Etlin, P.; Hahn, M.; Muster, U.; Nersessian, V.; Bonfrate, D.; Buser, R.; Cucinelli, M.; Gutsche, M.; Kehl, M.; et al. Powering wireless sensors: Microtechnology-based large-area thermoelectric generator for mass applications. In Proceedings of the 2011 IEEE Sensors, Limerick, Ireland, 28–31 October 2011; pp. 1293–1296. [Google Scholar]
- Dias, P.C.; Cadavid, D.; Ortega, S.; Ruiz, A.; França, M.B.M.; Morais, F.J.; Cabot, A. Autonomous soil moisture sensor based on nanostructured thermosensitive resistors powered by an integrated thermoelectric generator. Sens. Actuators A Phys. 2016, 239, 1–7. [Google Scholar] [CrossRef]
- Gao, J.; Chen, M. Beat the Deviations in Estimating Maximum Power of Thermoelectric Modules. IEEE Trans. Instrum. Meas. 2013, 62, 2725–2729. [Google Scholar] [CrossRef]
- Dalola, S.; Ferrari, M.; Ferrari, V.; Guizzetti, M.; Marioli, D.; Taroni, A. Characterization of Thermoelectric Modules for Powering Autonomous Sensors. IEEE Trans. Instrum. Meas. 2009, 58, 99–107. [Google Scholar] [CrossRef]
- Attivissimo, F.; Guarnieri Calò Carducci, C.; Lanzolla, A.M.L.; Spadavecchia, M. An Extensive Unified Thermo-Electric Module Characterization Method. Sensors 2016, 16, 2114. [Google Scholar] [CrossRef] [PubMed]
- Attivissimo, F.; Di Nisio, A.; Carducci, C.G.C.; Spadavecchia, M. Fast Thermal Characterization of Thermoelectric Modules Using Infrared Camera. IEEE Trans. Instrum. Meas. 2017, 66, 305–314. [Google Scholar] [CrossRef]
- Fan, D.; Ruiz, L.L.; Gong, J.; Lach, J. Profiling, modeling, and predicting energy harvesting for self-powered body sensor platforms. In Proceedings of the 2016 IEEE 13th International Conference on Wearable and Implantable Body Sensor Networks (BSN), San Francisco, CA, USA, 14–17 June 2016; pp. 402–407. [Google Scholar]
- Sanz-Bobi, M.A.; Palacios, R.; Aguilera, A. Potential use of small waste heat sources based on thermoelectricity: Application to an overhead projector and a battery charger. In Proceedings of the Fifth European Workshop on Thermoelectrics, ETS’99, Pardubice, Czech Republic, 20–21 September 1999; pp. 58–65. [Google Scholar]
- Kishi, M.; Nemoto, H.; Hamao, T.; Yamamoto, M.; Sudou, S.; Mandai, M.; Yamamoto, S. Micro thermoelectric modules and their application to wristwatches as an energy source. In Proceedings of the Eighteenth International Conference on Thermoelectrics, Baltimore, MD, USA, 29 August–2 September 1999; pp. 301–307. [Google Scholar]
- Madhal, M.; Wagnerova, R.; Frischer, R. Alternative Methods of Power Supply for Autonomous Intelligent Wireless Sensors. In Proceedings of the 12th International Carpathian Control Conference, Velké Karlovice, Czech Republic, 25–28 May 2011; pp. 262–265. [Google Scholar]
- Rizzon, L.; Rossi, M.; Passerone, R.; Brunelli, D. Self-powered heat-sink SoC as temperature sensors with wireless interface: Design and validation. In Proceedings of the 13th IEEE SENSORS Conference, Valencia, Spain, 2–5 November 2014; pp. 1575–1578. [Google Scholar]
- Rizzon, L.; Rossi, M.; Passerone, R.; Brunelli, D. Energy neutral hybrid cooling system for high performance processors. In Proceedings of the 2014 International Green Computing Conference, Dallas, TX, USA, 3–5 November 2014; pp. 1–6. [Google Scholar]
- Leonov, V.; Torfs, T.; Fiorini, P.; Van Hoof, C. Thermoelectric converters of human warmth for self-powered wireless sensor nodes. IEEE Sens. J. 2007, 7, 650–657. [Google Scholar] [CrossRef]
- Hoang, D.C.; Tan, Y.K.; Chng, H.B.; Panda, S.K. Thernal Energy Harvesting from Human Warmth for Wireless Body Area Network in Medical Health System. In Proceedings of the International Conference on Power Electronics and Drive Systems, Taipei, Taiwan, 2–5 November 2009; pp. 1277–1282. [Google Scholar]
- Amara-Madi, S.; Price, C.A.; Bensaoula, A.; Boukadoum, M. Autonomous sensor system for deep-sea pipeline monitoring. In Proceedings of the 2013 IEEE 11th International New Circuits and Systems Conference (NEWCAS), Paris, France, 16–19 June 2013; pp. 1–4. [Google Scholar]
- Mullen, P.; Siviter, J.; Montecucco, A.; Knox, A.R. A thermoelectric energy harvester with a cold start of 0.6 C. Mater. Today Proc. 2015, 2, 823–832. [Google Scholar] [CrossRef]
- Boyle, D.; Magno, M.; O'Flynn, B.; Brunelli, D.; Popovici, E.; Benini, L. Towards persistent structural health monitoring through sustainable wireless sensor networks. In Proceedings of the 2011 Seventh International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Adelaide, Australia, 6–9 December 2011; pp. 323–328. [Google Scholar]
- National Instruments USB-6008 Datasheet. Available online: http://www.ni.com/it-it/support/model.usb-6008.html (accessed on 25 September 2017).
- µCurrent Precicion Current Amplifier. Available online: http://www.alternatezone.com/electronics/ucurrent/ (accessed on 25 September 2017).
- LTC3108 DC-dc Converter Datasheet. Available online: http://cds.linear.com/docs/en/datasheet/3108fc.pdf (accessed on 25 September 2017).
- Nextreme WPG-1 Datasheet. Available online: http://www.mouser.com/ds/2/292/Nextreme_Thermobility_WPG-1_Data_Sheet-1931.pdf (accessed on 25 September 2017).
- BQ25504 Datasheet, Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/bq25504.pdf (accessed on 25 September 2017).
- Keysight E3648A. Available online: http://www.keysight.com/en/pd-836446-pn-E3648A/100w-dual-output-power-supply-two-8v-5a-or-20v-25a?cc=IT&lc=ita (accessed on 25 September 2017).
- CC1310 Datasheet, Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/cc1310.pdf (accessed on 25 September 2017).
- SmartRF Evaluation Board Datasheet, Texas Instruments. Available online: http://www.ti.com/lit/ug/swru321b/swru321b.pdf (accessed on 25 September 2017).
- Fernandes, W.R.; Tamus, Z.Á.; Orosz, T. Characterization of peltier cell for the use of waste heat of spas. In Proceedings of the 2014 55th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 14 October 2014; pp. 43–47. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Model | L [mm] | H [mm] | Rin [Ω] | ΔTmax [K] | A [] |
|---|---|---|---|---|---|---|
| TEG1 | 926-1216-ND | 26 | 14 | 0.25 @ 25 °C hot side T | 67 | 1507 |
| TEG2 | 926-1192-ND | 5 | 3.4 | 1.04 @ 25 °C hot side T | 67 | 17 |
| TEG3 | 926-1225-ND | 3.9 | 3 | dnp | 92 | 15.21 |
| Label | Rin [Ω] | [ | PF |
|---|---|---|---|
| TEG1 | 1.4 | 40.625 | 0.0271 |
| TEG2 | 2.3 | 6.94 | 0.404 |
| TEG3 | 2.1 | 6.04 | 0.397 |
| TEG4 | 2.23 | 224 | 0.14 |
| TEG5 | 250 K | 1 | 0.015 |
| TEG6 | 1.9 | 5.31 | 0.0033 |
| TEG7 | 1.08 | 0.25 | 0.156 |
| Supply | Vin [mV] | Iout [μA] | Pin [mW] | Pout [mW] | η (%) |
|---|---|---|---|---|---|
| TEG | 78 | 250 | 1.69 | 0.83 | 49.1 |
| DC | 477 | 1000 | 42 | 3.16 | 13.29 |
| Supply | Vin [mV] | Iout [μA] | Pin [mW] | Pout [mW] | Η (%) |
|---|---|---|---|---|---|
| TEG | 136 | 380 | 3.4 | 0.95 | 27.1 |
| DC | 477 | 850 | 43.5 | 2.6 | 5.9 |
| Label | Experimental Result | |||||
|---|---|---|---|---|---|---|
| TEG1 | (mW) | 1.8 | (mW) | 16.4 | (mW) | 44.5 |
| 1.55 | 18.9 | 77 | ||||
| TEG2 | (mW) | 0.18 | (mW) | 0.87 | (mW) | 2.0 |
| - | 0.62 | 1.76 | ||||
| TEG3 | (mW) | 0.15 | (mW) | 0.45 | (mW) | 1.4 |
| - | 0.2 | 1.15 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seyoum, B.B.; Rossi, M.; Brunelli, D. Energy Neutral Wireless Bolt for Safety Critical Fastening. Sensors 2017, 17, 2211. https://doi.org/10.3390/s17102211
Seyoum BB, Rossi M, Brunelli D. Energy Neutral Wireless Bolt for Safety Critical Fastening. Sensors. 2017; 17(10):2211. https://doi.org/10.3390/s17102211
Chicago/Turabian StyleSeyoum, Biruk B., Maurizio Rossi, and Davide Brunelli. 2017. "Energy Neutral Wireless Bolt for Safety Critical Fastening" Sensors 17, no. 10: 2211. https://doi.org/10.3390/s17102211
APA StyleSeyoum, B. B., Rossi, M., & Brunelli, D. (2017). Energy Neutral Wireless Bolt for Safety Critical Fastening. Sensors, 17(10), 2211. https://doi.org/10.3390/s17102211