Real-Valued 2D MUSIC Algorithm Based on Modified Forward/Backward Averaging Using an Arbitrary Centrosymmetric Polarization Sensitive Array

Abstract
:1. Introduction
2. Array Signal Model for DOA Estimation
2.1. Received Signal Model
2.2. Conjugate Centrosymmetric Signal Model
3. Real-valued 2D DOA Estimation Based on Modified FB Averaging
3.1. The Modified FB Averaging
3.2. 2D DOA Estimation with Real-Valued Spectrum Function
4. Discussion
4.1. Cramer-Rao Bound (CRB) Analysis
4.2. Theoretical Computational Complexity Analysis
5. Simulation Results
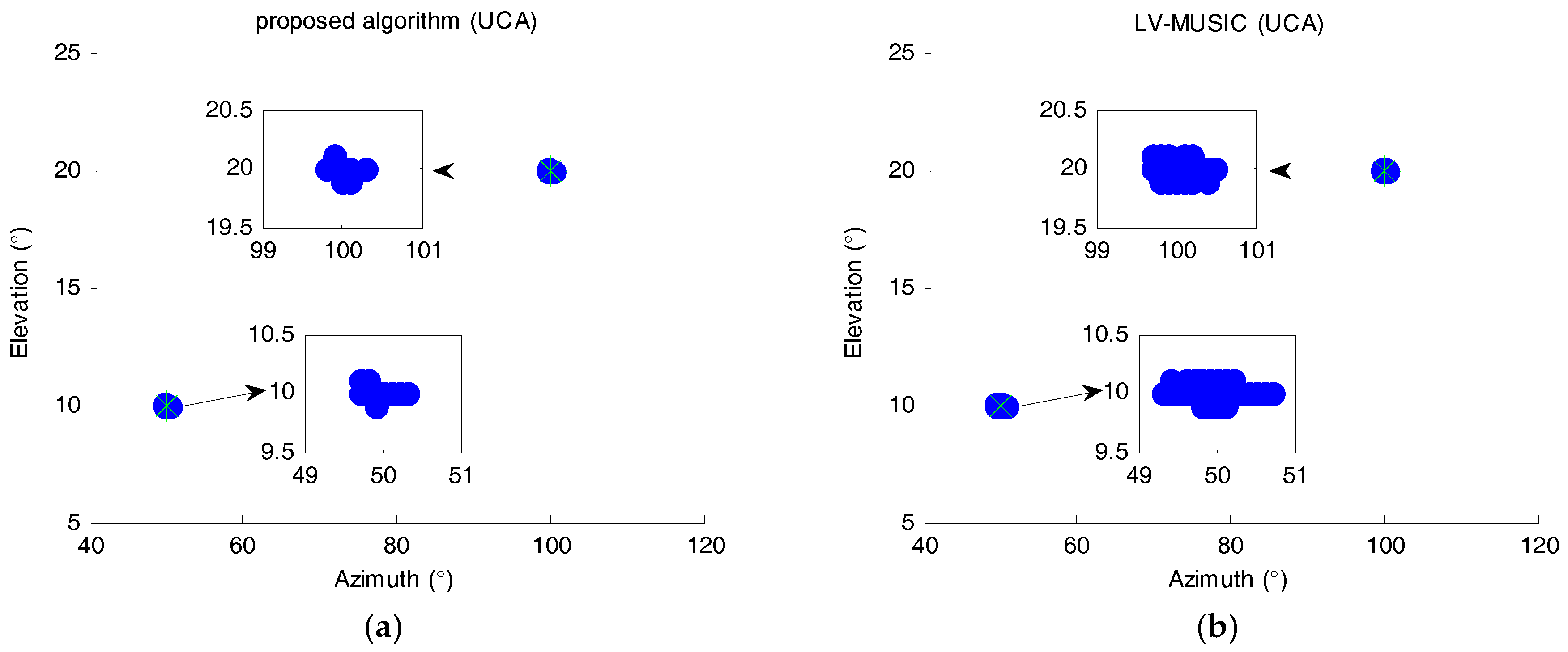
5.1. The Simulation Results Distribution Scatter Plots
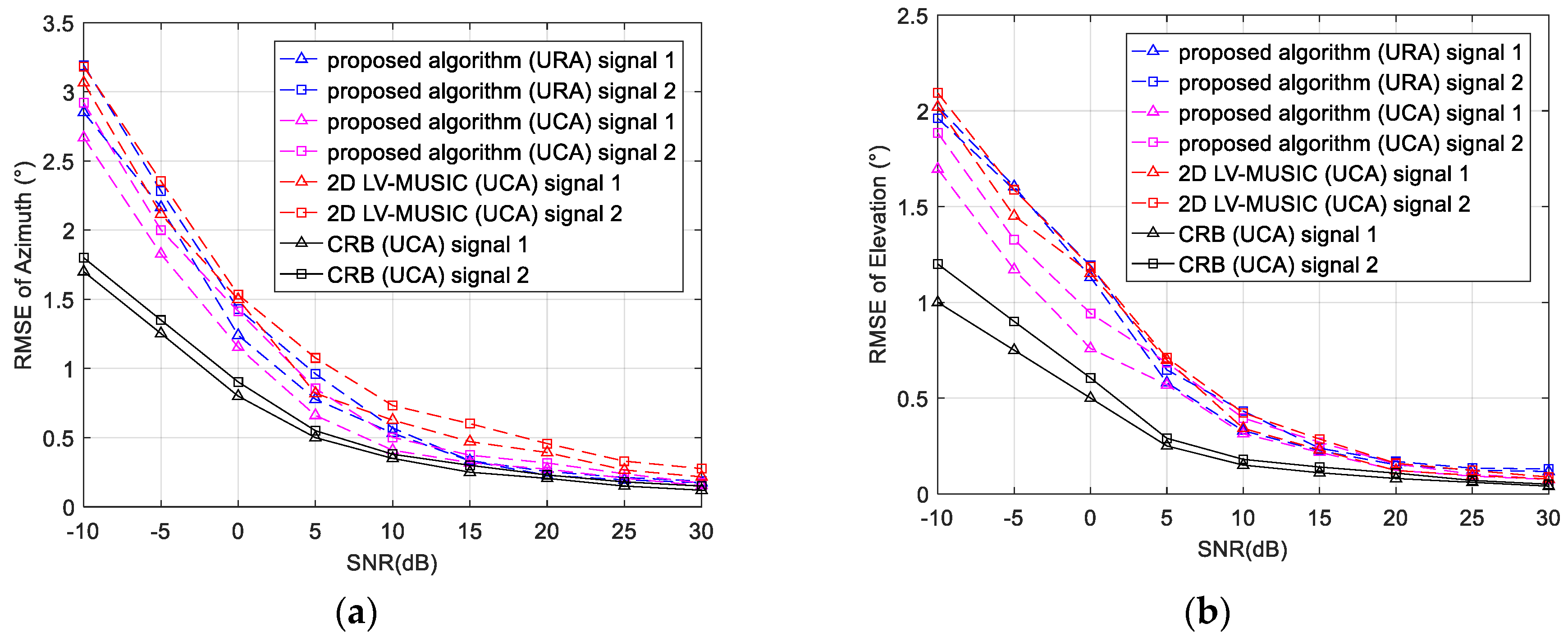
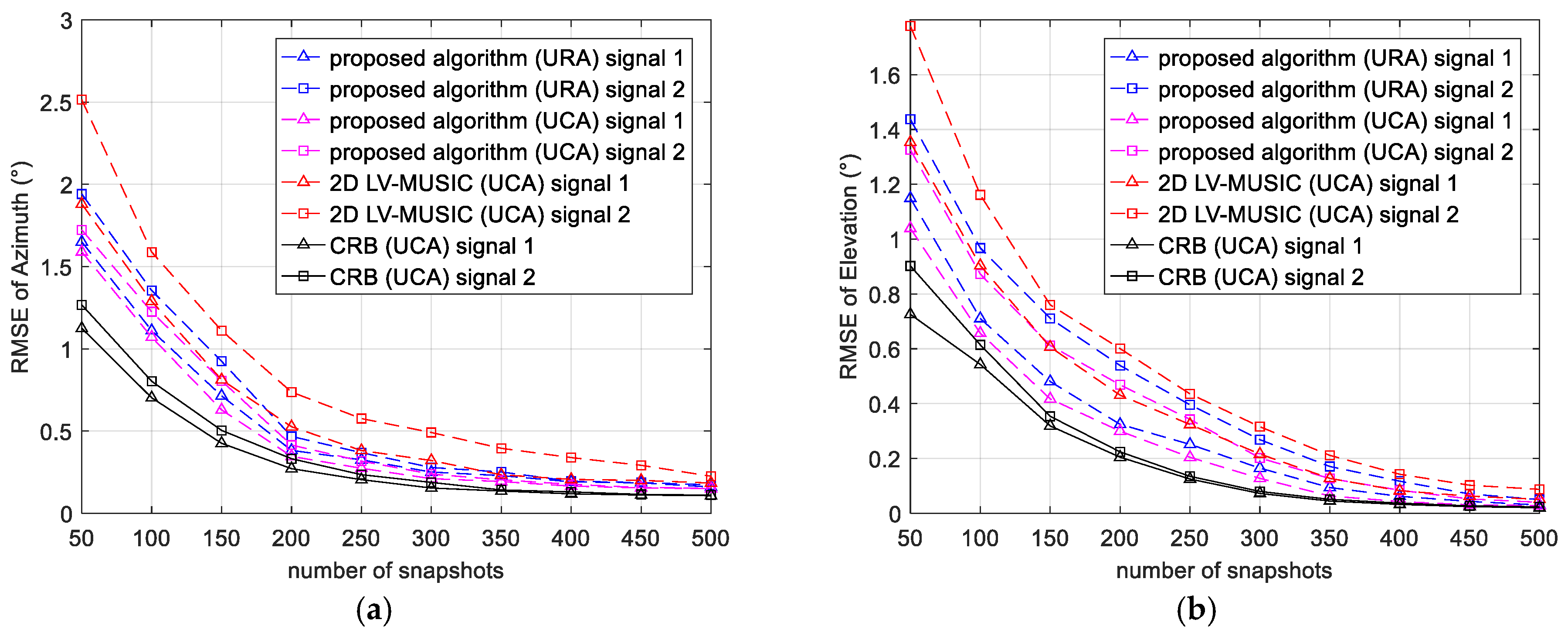
5.2. The Estimation Performance versus SNR and the Number of Snapshots
5.3. Running Time Comparison
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Zhang, Y.D.; Shi, Z.; Jin, T.; Wu, X. Compressive sensing coprime array signal for high-resolution DOA estimation. IET Commun. 2017, 11, 1719–1724. [Google Scholar] [CrossRef]
- Guo, M.; Chen, T.; Wang, B. An improved DOA estimation approach using coarray interpolation and matrix denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Zhang, Y.D.; Wang, W. Robust DOA estimation in the presence of miscalibrated sensors. IEEE Signal Process. Lett. 2017, 24, 1073–1077. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.D.; Wang, W. Robust group compressive sensing for DOA estimation with partially distorted observations. EURASIP J. Adv. Signal Process. 2016, 2016. [Google Scholar] [CrossRef]
- Wu, N.; Qu, Z.; Si, W.; Jiao, S. DOA and polarization estimation using an electromagnetic vector sensor uniform circular array based on the ESPRIT algorithm. Sensors 2016, 16, 2109. [Google Scholar] [CrossRef] [PubMed]
- Si, W.; Zhao, P.; Qu, Z. Two-dimensional DOA and polarization estimation for a mixture of uncorrelated and coherent sources with sparsely-distributed vector sensor array. Sensors 2016, 16, 789. [Google Scholar] [CrossRef] [PubMed]
- Zhao, A.; Ma, L.; Ma, X.; Hui, J. An improved azimuth angle estimation method with a single acoustic vector sensor based on an active sonar detection system. Sensors 2017, 17, 412. [Google Scholar] [CrossRef] [PubMed]
- Yuan, X.; Wong, K.T.; Agrawal, K. Polarization estimation with a dipole-dipole pair, a dipole-loop pair, or a loop-loop pair of various orientations. IEEE Trans. Antennas Propag. 2012, 60, 2442–2452. [Google Scholar] [CrossRef]
- Yuan, X.; Wong, K.T.; Xu, Z.; Agrawal, K. Various compositions to form a triad of collocated dipoles/loops, for direction finding and polarization estimation. IEEE Sens. J. 2012, 12, 1763–1771. [Google Scholar] [CrossRef]
- Wang, L.; Yang, L.; Wang, G.; Chen, Z.; Zou, M. Uni-vector-sensor dimensionality reduction MUSIC algorithm for DOA and polarization estimation. Math. Probl. Eng. 2014, 2014, 682472. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Wong, K.T. Closed-form eigenstructure-based direction finding using arbitrary but identical subarrays on a sparse uniform cartesian array grid. IEEE Trans. Signal Proces. 2000, 48, 2205–2210. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Uni-vector-sensor ESPRIT for multisource azimuth, elevation, and polarization estimation. IEEE Trans. Antennas Propag. 1997, 45, 1467–1474. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Closed-form direction finding and polarization estimation with arbitrarily spaced electromagnetic vector-sensors at unknown locations. IEEE Trans. Antennas Propag. 2000, 48, 671–681. [Google Scholar] [CrossRef]
- Gong, J.; Lou, S.; Guo, Y. ESPRIT-like algorithm for computational-efficient angle estimation in bistatic multiple-input multiple-output radar. J. Appl. Remote Sens. 2016, 10, 025003. [Google Scholar] [CrossRef]
- Li, L. Root-MUSIC-based direction-finding and polarization estimation using diversely polarized possibly collocated antennas. IEEE Antennas Wirel. Propag. Lett. 2004, 3, 129–132. [Google Scholar]
- Qian, C.; Huang, L.; So, H.-C. Improved unitary root-MUSIC for DOA estimation based on pseudo-noise resampling. IEEE Signal Process Lett. 2014, 21, 140–144. [Google Scholar] [CrossRef]
- Yan, F.-G.; Shen, Y.; Jin, M. Fast DOA estimation based on a split subspace decomposition on the array covariance matrix. Signal Process. 2015, 115, 1–8. [Google Scholar] [CrossRef]
- Wong, K.T.; Yuan, X. “Vector cross-product direction-finding” with an electromagnetic vector-sensor of six orthogonally oriented but spatially noncollocating dipoles/loops. IEEE Trans. Signal Process. 2011, 59, 160–171. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Wong, K.T. ESPRIT-based 2D direction finding with a sparse uniform array of electromagnetic vector sensors. IEEE Trans. Signal Process. 2000, 48, 2195–2204. [Google Scholar] [CrossRef]
- Miron, S.; Le Bihan, N.; Mars, J.I. Quaternion-MUSIC for vector-sensor array processing. IEEE Trans. Signal Process. 2006, 54, 1218–1229. [Google Scholar] [CrossRef]
- Le Bihan, N.; Miron, S.; Mars, J.I. MUSIC algorithm for vector-sensors array using biquaternions. IEEE Trans. Signal Process. 2007, 55, 4523–4533. [Google Scholar] [CrossRef]
- Wang, G.; Tao, H.; Su, J.; Guo, X.; Zeng, C.; Wang, L. Mutual coupling calibration for electromagnetic vector sensor array. In Proceedings of the International Symposium on Antennas, Propagation and EM Theory (ISAPE), Xi’an, China, 22–26 October 2012; pp. 261–264. [Google Scholar]
- Hua, Y. A pencil-MUSIC algorithm for finding two-dimensional angles and polarizations using crossed dipoles. IEEE Trans. Antennas Propag. 1993, 41, 370–376. [Google Scholar] [CrossRef]
- Wang, K.; He, J.; Shu, T.; Liu, Z. Localization of mixed completely and partially polarized signals with crossed-dipole sensor arrays. Sensors 2015, 15, 31859–31868. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Wu, H.; Zhao, Z. The real-valued sparse direction of arrival (DOA) estimation based on the Khatri-Rao product. Sensors 2016, 16, 693. [Google Scholar] [CrossRef] [PubMed]
- Akkar, S.; Gharsallah, A. Reactance domains unitary MUSIC algorithms based on real-valued orthogonal decomposition for electronically steerable parasitic array radiator antennas. IET Microw. Antennas Propag. 2012, 6, 223–230. [Google Scholar] [CrossRef]
- Nie, W.; Xu, K.; Feng, D.; Wu, C.Q.; Hou, A.; Yin, X. A fast algorithm for 2D DOA estimation using an omnidirectional sensor array. Sensors 2017, 17, 515. [Google Scholar] [CrossRef] [PubMed]
- Li, J. Direction and polarization estimation using arrays with small loops and short dipoles. IEEE Trans. Antennas Propag. 1993, 41, 379–387. [Google Scholar] [CrossRef]
- Dong, W.; Diao, M.; Gao, L.; Liu, L. A low-complexity DOA and polarization method of polarization-sensitive array. Sensors 2017, 17, 1170. [Google Scholar] [CrossRef] [PubMed]
- Gong, X.; Liu, Z.; Xu, Y.; Ahmad, M.I. Direction-of-arrival estimation via twofold mode-projection. Signal Process. 2009, 89, 831–842. [Google Scholar] [CrossRef]
- Linebarger, D.A.; DeGroat, R.D.; Dowling, E.M. Efficient direction-finding methods employing forward/backward averaging. IEEE Trans. Signal Process. 1994, 42, 2136–2145. [Google Scholar] [CrossRef]
- Pesavento, M.; Gershman, A.B.; Haardt, M. Unitary root-MUSIC with a real-valued eigendecomposition: A theoretical and experimental performance study. IEEE Trans. Signal Process. 2000, 48, 1306–1314. [Google Scholar] [CrossRef]
- Yan, F.; Shen, Y.; Jin, M.; Qiao, X. Computationally efficient direction finding using polynomial rooting with reduced-order and real-valued computations. J. Syst. Eng. Electron. 2016, 27, 739–745. [Google Scholar]
- Gu, Y.; Goodman, N.A. Information-theoretic compressive sensing kernel optimization and Bayesian Cramér-Rao bound for time delay estimation. IEEE Trans. Signal Process. 2017. [Google Scholar] [CrossRef]
- Weiss, A.J.; Friedlander, B. Performance analysis of diversely polarized antenna arrays. IEEE Trans. Signal Process. 1991, 39, 1589–1603. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, H.; Chen, H.; Dong, Y.; Wang, L. A low-complexity method for two-dimensional direction-of-arrival estimation using an L-shaped array. Sensors 2017, 17, 190. [Google Scholar] [CrossRef] [PubMed]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; JHU Press: Baltimore, MD, USA, 2012; Volume 3. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | The Received Signal Model (RSM) of Array . |
|---|---|
| Output | 2D DOA Estimation. |
| Step 1 | Obtain the CCSM observation matrix . |
| Step 2 | Compute the real-valued matrix by (36). |
| Step 3 | Compute the symmetric real-valued covariance matrix . |
| Step 4 | Perform the EVD of by (30) to get . |
| Step 5 | Compute the spectrum function at each searching point via , and estimate 2D azimuth angle and elevation angle of K signals by . |
| Search Step | Number of Sensors | Proposed Algorithm | LV-MUSIC (2D Search) |
|---|---|---|---|
| 0.25 | 12 | 17.6096 | 21.4674 |
| 0.5 | 12 | 4.8517 | 5.5413 |
| 1 | 12 | 1.1539 | 1.4175 |
| 0.5 | 6 | 3.9773 | 4.5010 |
| 0.5 | 18 | 6.2451 | 8.5407 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, W.; Wang, Y.; Hou, C.; Wang, H. Real-Valued 2D MUSIC Algorithm Based on Modified Forward/Backward Averaging Using an Arbitrary Centrosymmetric Polarization Sensitive Array. Sensors 2017, 17, 2241. https://doi.org/10.3390/s17102241
Si W, Wang Y, Hou C, Wang H. Real-Valued 2D MUSIC Algorithm Based on Modified Forward/Backward Averaging Using an Arbitrary Centrosymmetric Polarization Sensitive Array. Sensors. 2017; 17(10):2241. https://doi.org/10.3390/s17102241
Chicago/Turabian StyleSi, Weijian, Yan Wang, Changbo Hou, and Hong Wang. 2017. "Real-Valued 2D MUSIC Algorithm Based on Modified Forward/Backward Averaging Using an Arbitrary Centrosymmetric Polarization Sensitive Array" Sensors 17, no. 10: 2241. https://doi.org/10.3390/s17102241
APA StyleSi, W., Wang, Y., Hou, C., & Wang, H. (2017). Real-Valued 2D MUSIC Algorithm Based on Modified Forward/Backward Averaging Using an Arbitrary Centrosymmetric Polarization Sensitive Array. Sensors, 17(10), 2241. https://doi.org/10.3390/s17102241