Downhole Applications of Magnetic Sensors

Abstract
:1. Introduction
2. Downhole Magnetometers
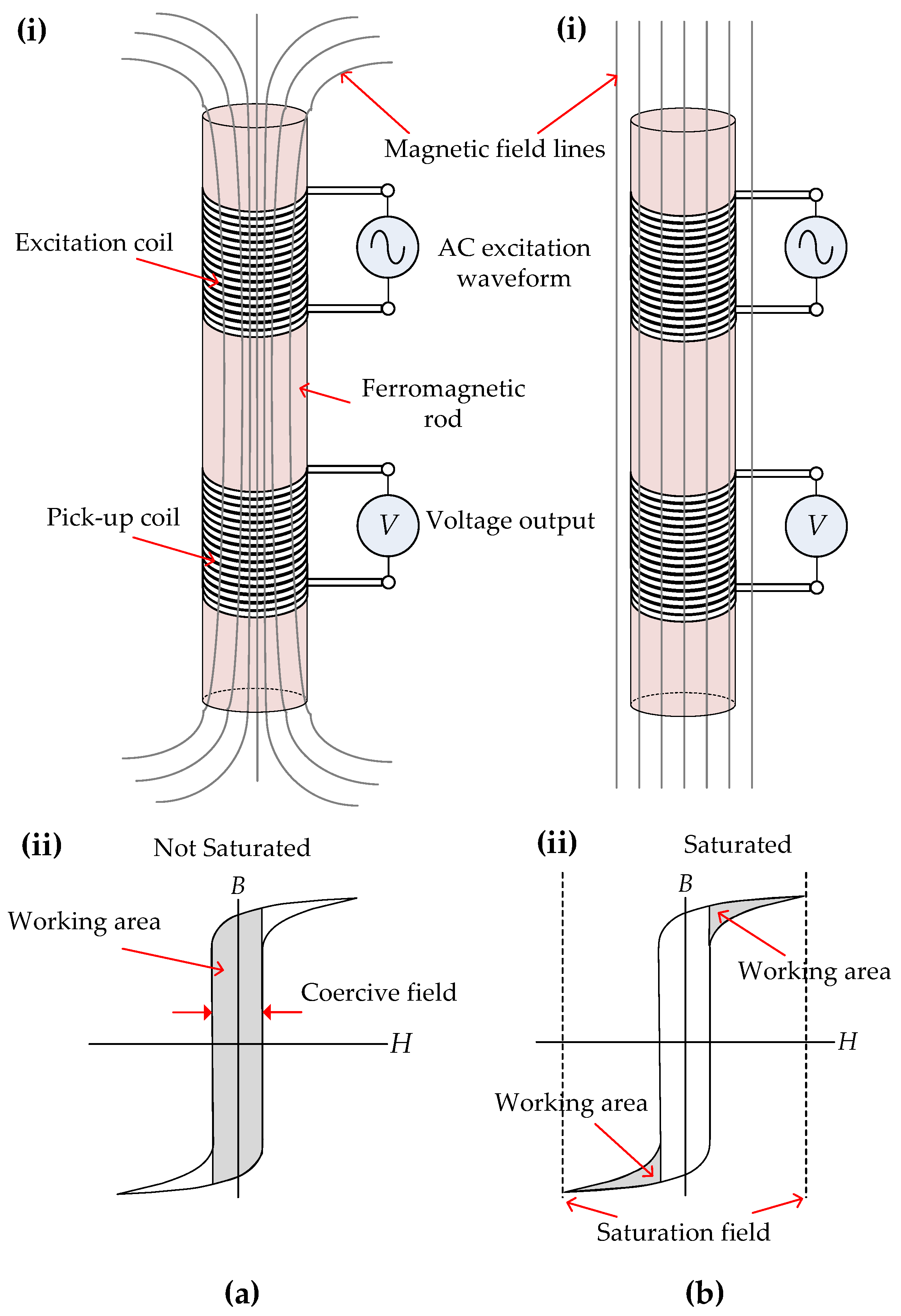
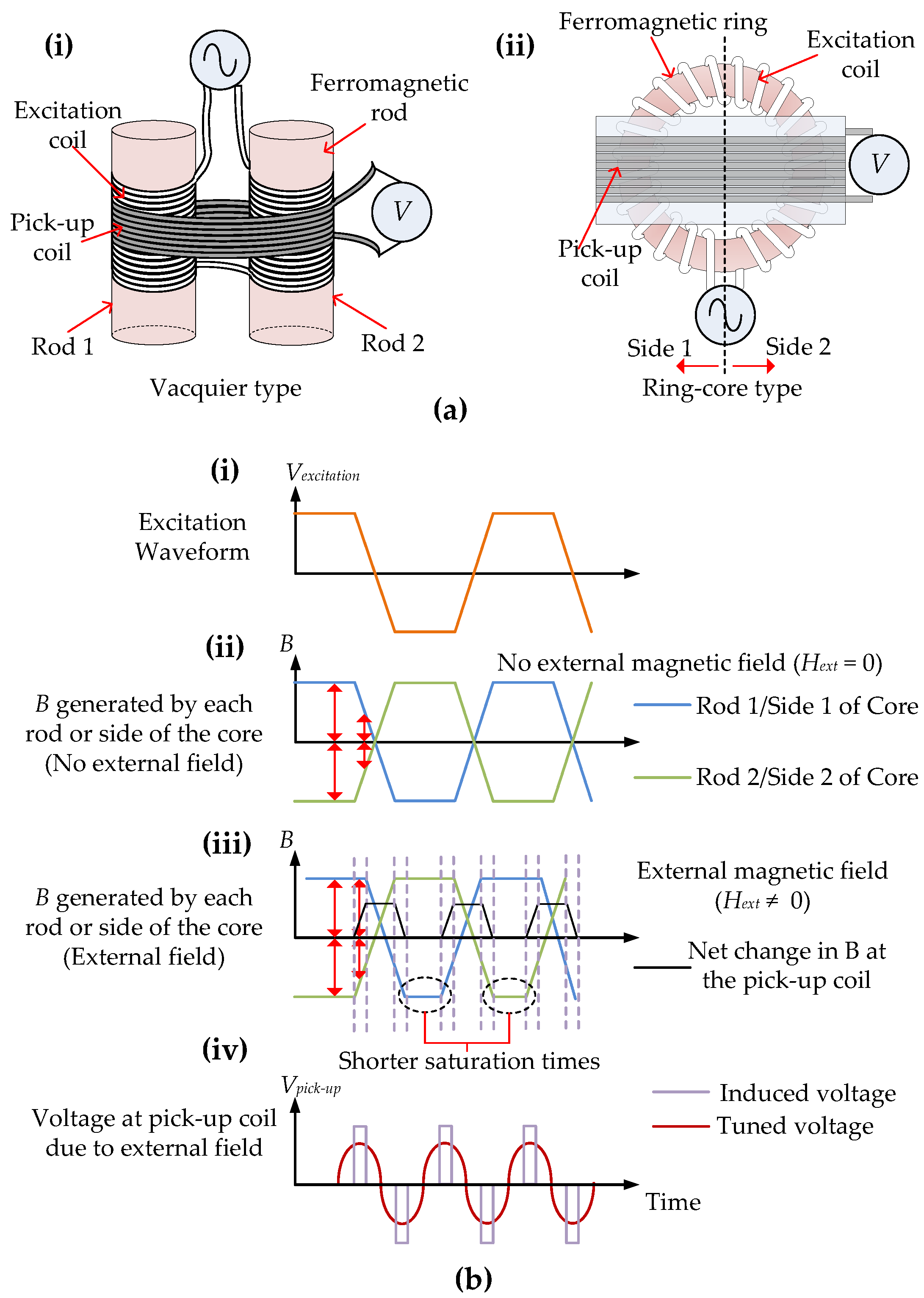
2.1. Principles of Fluxgate Magnetometers
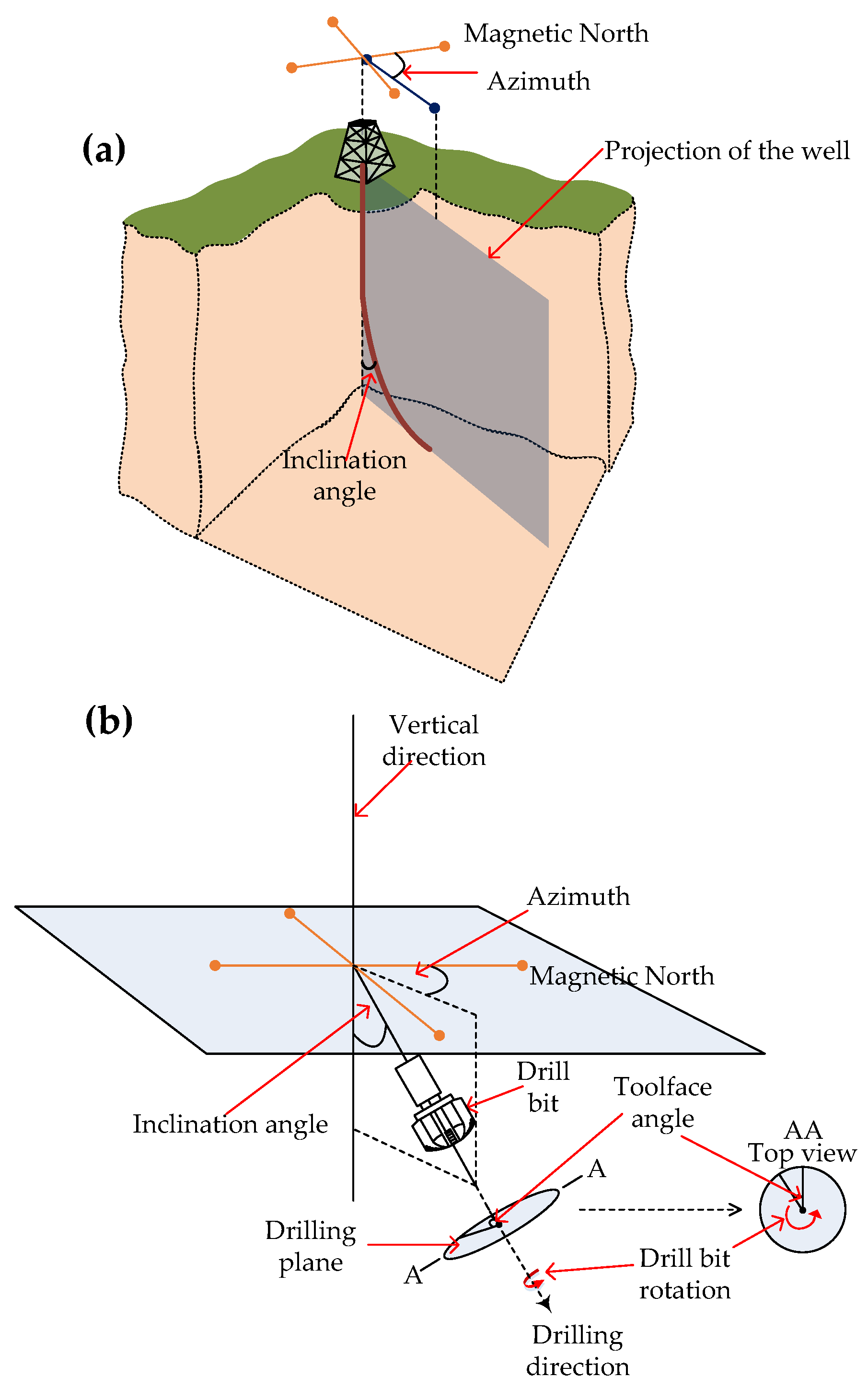
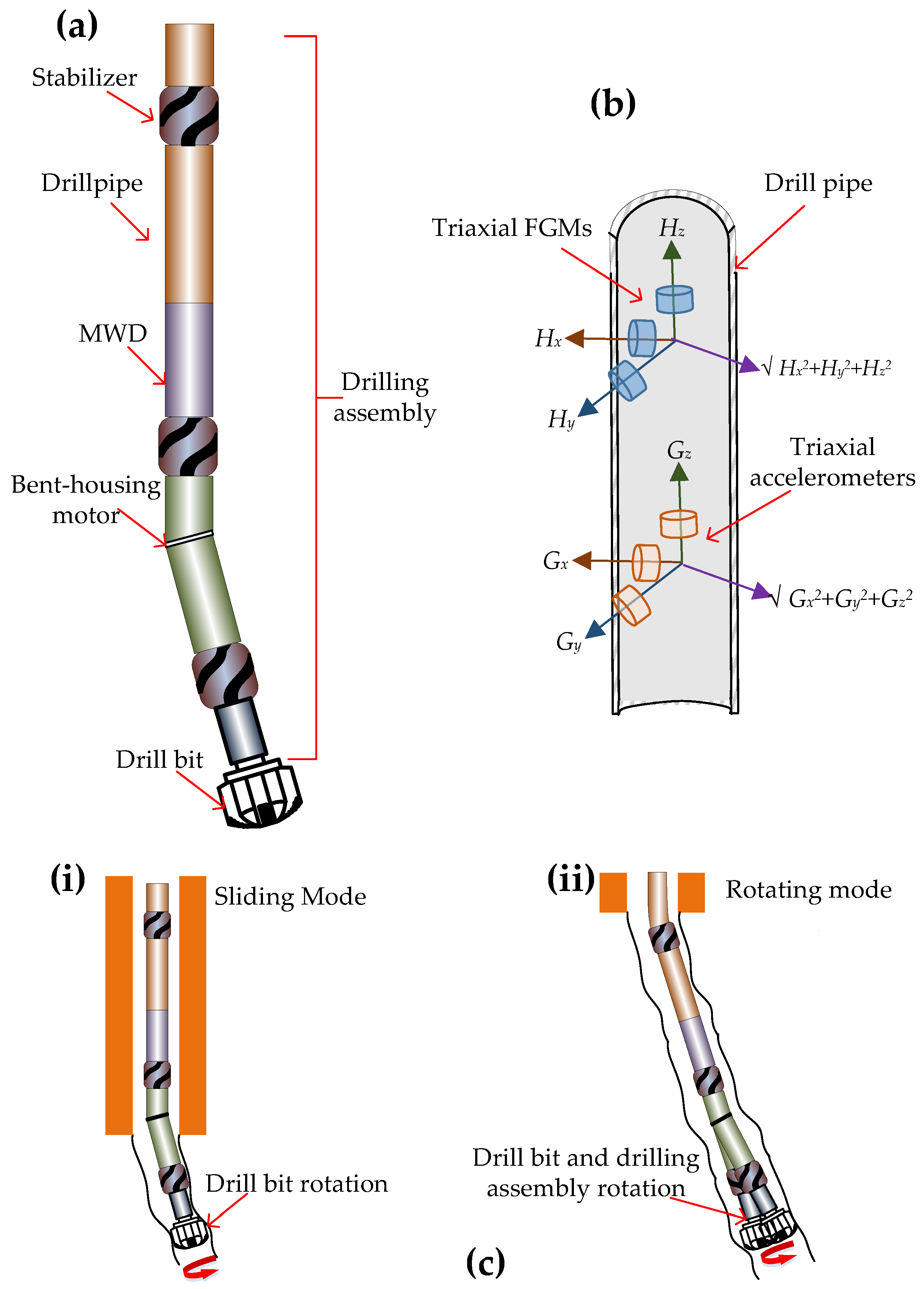
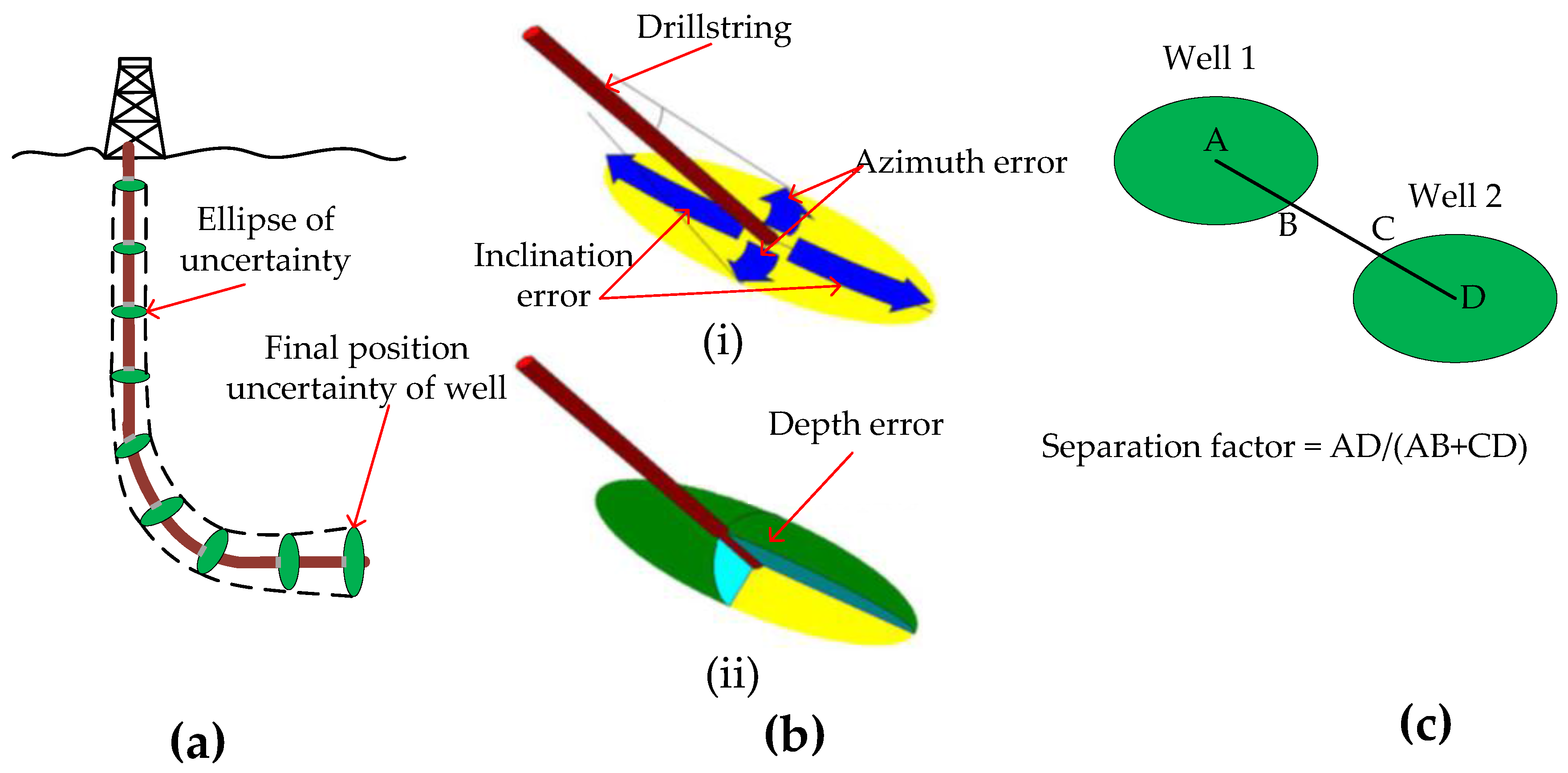
2.2. Navigating a Well Using Magnetometers
2.3. Field Results
3. Nuclear Magnetic Resonance (NMR)
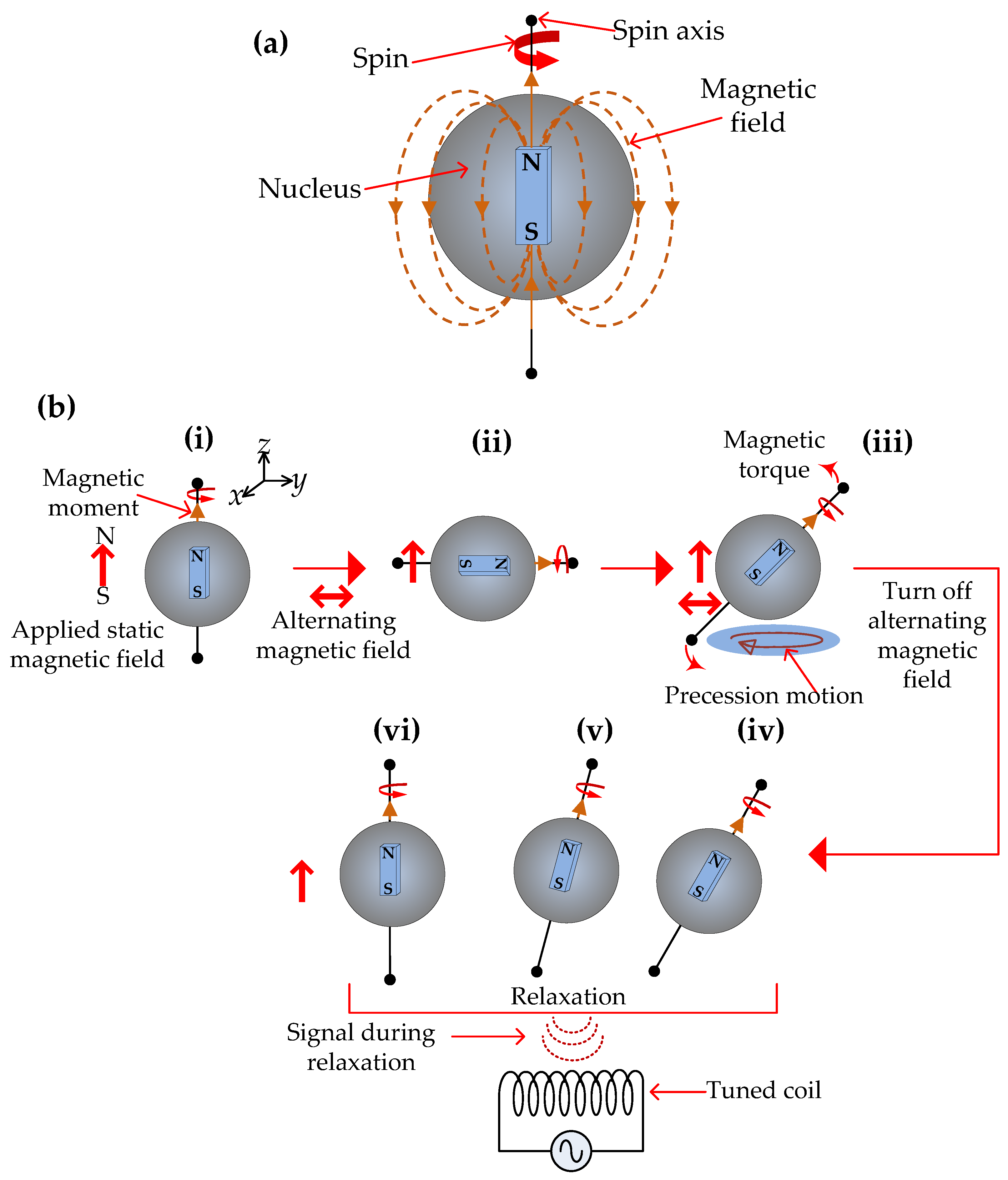
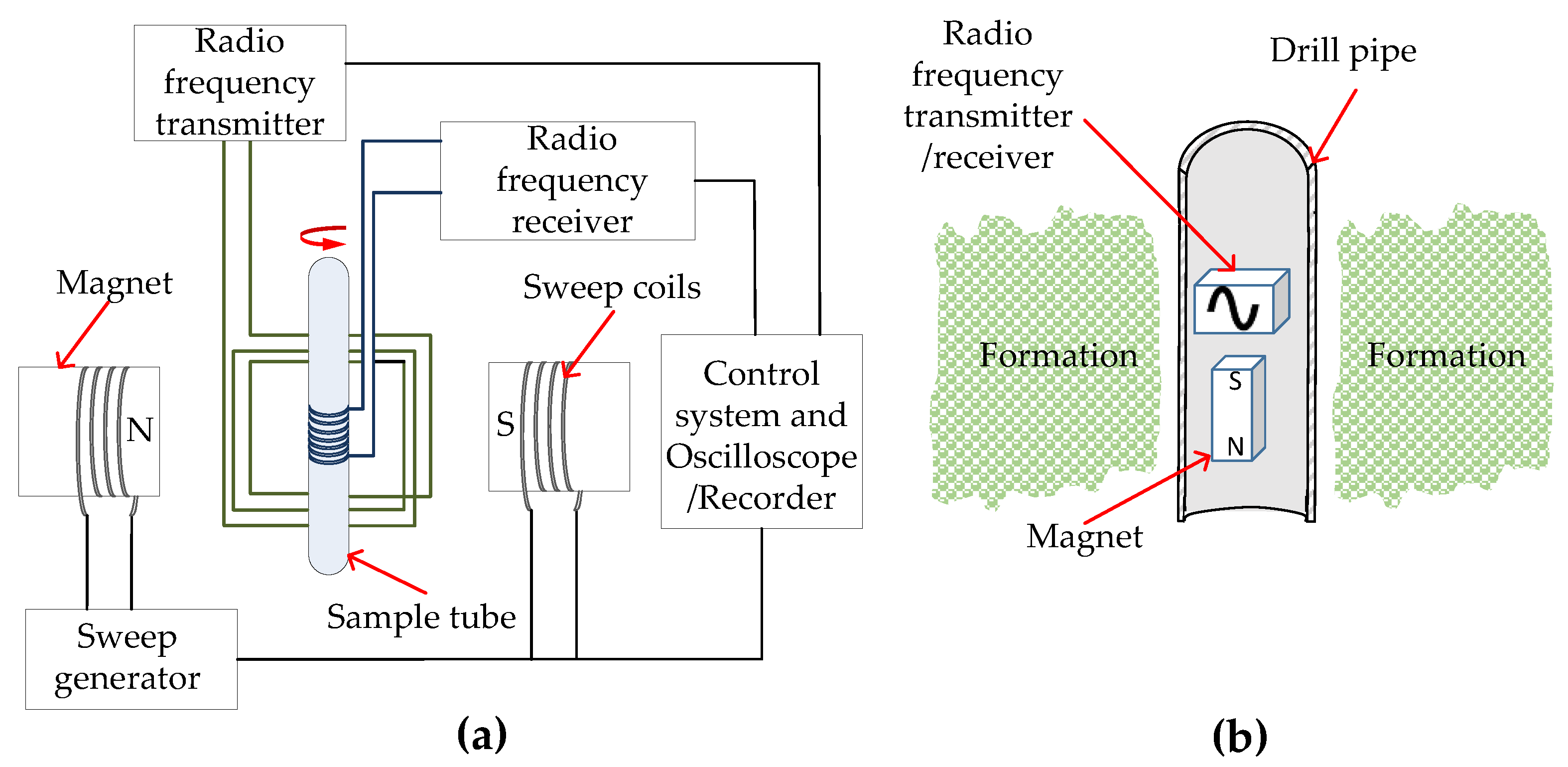
3.1. Principles of NMR
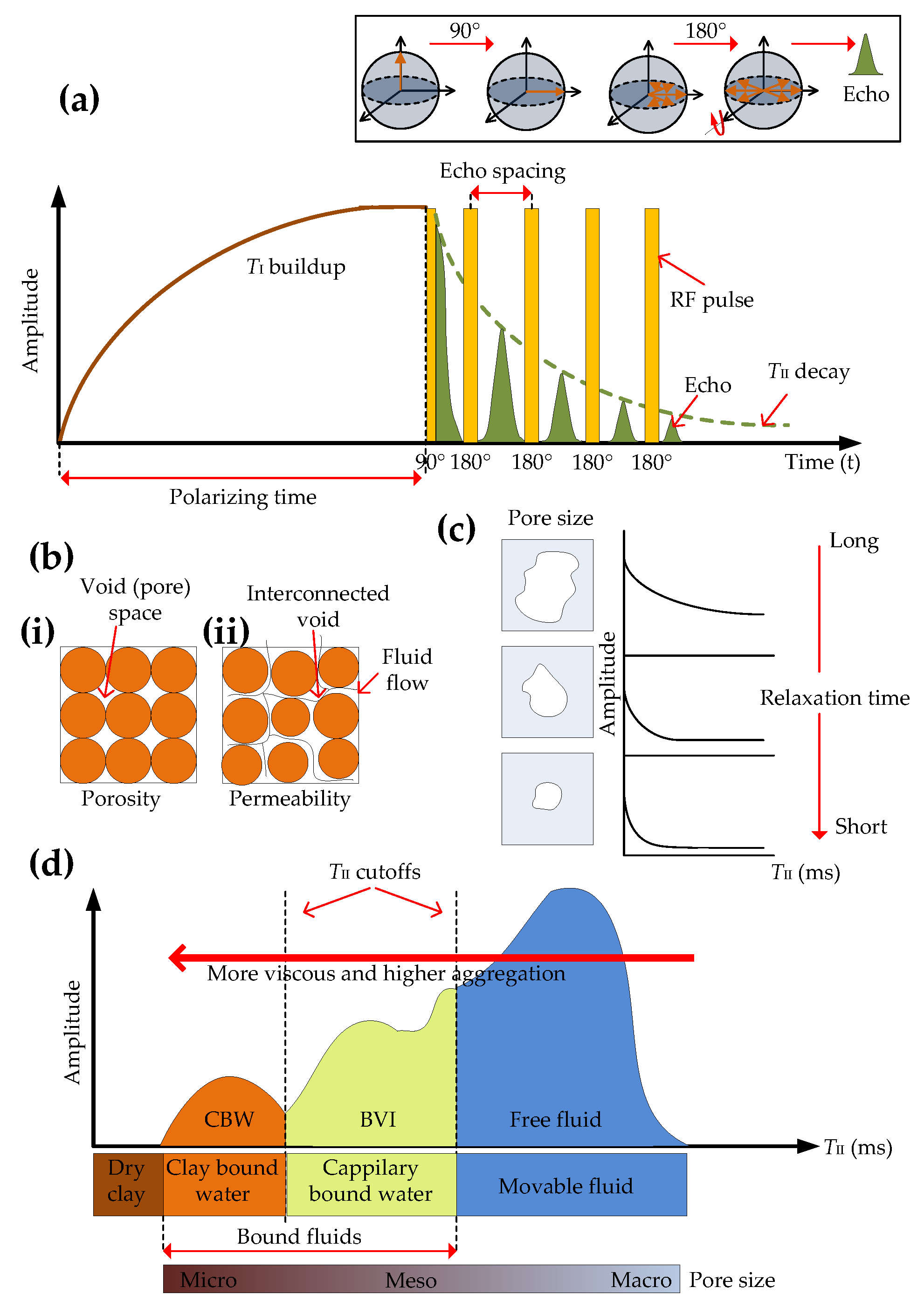
3.2. NMR for Obtaining Geological Parameters
3.3. Field Results
4. Discussion: Research Opportunities for Other Types of Magnetic Sensors
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lenz, J.; Edelstein, A.S. Magnetic Sensors and Their Applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Ripka, P.; Janosek, M. Advances in Magnetic Field Sensors. IEEE Sens. J. 2010, 10, 1108–1116. [Google Scholar] [CrossRef]
- Blachowicz, T.; Ehrmann, A. Simulation of magnetic coatings in textile fibers. J. Phys. Conf. Ser. 2016, 738, 012057. [Google Scholar] [CrossRef]
- Huang, Q.; Song, Y.; Sun, X.; Jiang, L.; Pong, P.W.T. Magnetics in Smart Grid. IEEE Trans. Magn. 2014, 50, 0900107. [Google Scholar] [CrossRef]
- Yassine, O.; Gooneratne, C.P.; Smara, D.A.; Li, F.; Mohammed, H.; Merzaban, J.; Kosel, J. Isolation of cells for selective treatment and analysis using a magnetic microfluidic chip. Biomicrofluidics 2014, 8, 034114. [Google Scholar] [CrossRef] [PubMed]
- Gooneratne, C.P.; Yassine, O.; Giouroudi, I.; Kosel, J. Selective Manipulation of Superparamagnetic Beads by a Magnetic Microchip. IEEE Trans. Magn. 2013, 49, 3418–3421. [Google Scholar] [CrossRef]
- McFadyen, I.R.; Fullerton, E.E.; Carey, M.J. State-of-the-Art Magnetic Hard Disk Drives. MRS Bull. 2006, 31, 379–383. [Google Scholar] [CrossRef]
- Ripka, P. Security applications of magnetic sensors. J. Phys. Conf. Ser. 2013, 450, 012001. [Google Scholar] [CrossRef]
- Díaz-Michelena, M. Small Magnetic Sensors for Space Applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef] [PubMed]
- Gooneratne, C.P.; Kurnicki, A.; Yamada, S.; Mukhopadhyay, S.C.; Kosel, J. Analysis of the Distribution of Magnetic Fluid inside Tumors by a Giant Magnetoresistance Probe. PLoS ONE 2013, 8, e81227. [Google Scholar] [CrossRef] [PubMed]
- Teichmann, D.; Kuhn, A.; Leonhardt, S.; Walter, M. The MAIN Shirt: A Textile-Integrated Magnetic Induction Sensor Array. Sensors 2014, 14, 1039–1056. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lai, Y.C.; Jan, S.S.; Hsiao, F.B. Development of a Low-Cost Attitude and Heading Reference System Using a Three-Axis Rotating Platform. Sensors 2010, 10, 2472–2491. [Google Scholar] [CrossRef] [PubMed]
- Lin, G.; Makarov, D.; Schmidt, O.G. Magnetic sensing platform technologies for biomedical applications. Lab Chip 2017, 17, 1884–1912. [Google Scholar] [CrossRef] [PubMed]
- Hermanis, A.; Cacurs, R.; Greitans, M. Shape sensing based on acceleration and magnetic sensor system. In Proceedings of the 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS), Hapuna Beach, HI, USA, 23–26 March 2015. [Google Scholar] [CrossRef]
- Ribeiro, M. Robot-Aided Magnetic Sensors Readout Suit. In Proceedings of the 2015 9th International Conference on Sensing Technology (ICST), Auckland, New Zealand, 8–10 December 2015. [Google Scholar] [CrossRef]
- Altun, K.; Barshan, B.; Tuncel, O. Comparative study on classifying human activities with miniature inertial and magnetic sensors. Pattern Recognit. 2010, 43, 3605–3620. [Google Scholar] [CrossRef] [Green Version]
- Childress, J.R.; Fontana, R.E., Jr. Magnetic recording head sensor technology. C. R. Phys. 2005, 6, 997–1012. [Google Scholar] [CrossRef]
- Ouyang, Y.; He, J.; Hu, J.; Zhao, G.; Wang, Z.; Wang, S.X. Contactless Current Sensors Based on Magnetic Tunnel Junction for Smart Grid Applications. IEEE Trans. Magn. 2015, 51, 4004904. [Google Scholar] [CrossRef]
- Treutler, C.P.O. Magnetic sensor for automotive applications. Sens. Actuators A Phys. 2001, 91, 2–6. [Google Scholar] [CrossRef]
- Hussain, M.E.; AL-Majed, A.A. Horizontal and Directional Drilling, in Fundamentals of Sustainable Drilling Engineering; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Bourgoyne, A.T.; Millheim, K.K.; Chenevert, M.E.; Young, F.S., Jr. Applied Drilling Engineering; Society of Petroleum Engineers: Houston, TX, USA, 1991; pp. 351–443. [Google Scholar]
- Kaluza, F.; Gruger, A.; Gruger, H. New and future applications of fluxgate sensors. Sens. Actuators A Phys. 2003, 106, 48–51. [Google Scholar] [CrossRef]
- Djamal, M.; Sanjaya, E.; Yulkifli; Ramli. Development of fluxgate sensors and its applications. In Proceedings of the 2011 2nd International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering, Bandung, Indonesia, 8–9 November 2011; pp. 421–426. [Google Scholar] [CrossRef]
- Vcelak, J.; Petrucha, V.; Kaspar, P. Compact Digital Compass with PCB Fluxgate Sensors. IEEE Sens. 2006, 859–861. [Google Scholar] [CrossRef]
- Primdahl, F. The fluxgate magnetometer. J. Phys. E Sci. Instrum. 1979, 12, 241–253. [Google Scholar] [CrossRef]
- Ripka, P. Advances in fluxgate sensors. Sens. Actuators A Phys. 2003, 106, 8–14. [Google Scholar] [CrossRef]
- Ripka, P. Review of fluxgate sensors. Sens. Actuators A Phys. 1992, 33, 129–141. [Google Scholar] [CrossRef]
- Sebbes, P.; Ludwig, F.; Schilling, M. Fluxgate magnetometer for temperatures up to 180 °C. J. Electr. Eng. 2010, 61, 21–23. [Google Scholar]
- Ruhmer, D.; Bogeholz, S.; Ludwig, F.; Schilling, M. Vector fluxgate magnetometer for high operation temperatures up to 250 °C. Sens. Actuators A Phys. 2015, 228, 118–124. [Google Scholar] [CrossRef]
- Primdahl, F.; Brauer, P.; Merayo, J.M.G.; Nielsen, O.V. The fluxgate ring-core internal field. Meas. Sci. Technol. 2002, 13, 1248. [Google Scholar] [CrossRef]
- Janosek, M. Parallel Fluxgate Magnetometers. In High Sensitivity Magnetometers in Smart Sensors Measurement and Instrumentation; Springer: Cham, Switzerland, 2017; Volume 19. [Google Scholar] [CrossRef]
- Primdahl, F. The fluxgate mechanism, part I: The gating curves of parallel and orthogonal fluxgates. IEEE Trans. Magn. 1970, 6, 376–383. [Google Scholar] [CrossRef]
- Fluxgate Magnetometers. Available online: http://www.imperial.ac.uk/space-and-atmospheric-physics/research/areas/space-magnetometer-laboratory/space-instrumentation-research/magnetometers/fluxgate-magnetometers/ (accessed on 12 August 2017).
- Baschirotto, A.; Dallago, E.; Malcovati, P.; Marchesi, M.; Venchi, G. A Fluxgate Magnetic Sensor: From PCB to Micro-Integrated Technology. IEEE Trans. Instrum. Meas. 2007, 56, 25–31. [Google Scholar] [CrossRef]
- Ciudad, D.; Díaz-Michelena, M.; Perez, L.; Aroca, C. Small Fluxgate Magnetometers: Development and Future Trends in Spain. Sensors 2010, 10, 1859–1870. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.C.; Huang, J.; Chiu, P.K.; Chiu, S.L.; Jeng, J.T. High-Sensitivity Low-Noise Miniature Fluxgate Magnetometers Using a Flip Chip Conceptual Design. Sensors 2014, 14, 13815–13829. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.C.; Huang, J. A 3-Axis Miniature Magnetic Sensor Based on a Planar Fluxgate Magnetometer with an Orthogonal Fluxguide. Sensors 2015, 15, 14727–14744. [Google Scholar] [CrossRef] [PubMed]
- Buchanan, A.; Finn, C.A.; Love, J.J.; Worthington, E.W.; Lawson, F.; Maus, S.; Okewunmi, S.; Poedjono, B. Geomagnetic Referencing—The Real-Time Compass for Directional Drillers. Oilfield Rev. 2013, 25, 32–47. [Google Scholar]
- Thorgood, J.L.; Knott, D.R. Surveying Techniques with a Solid State Magnetic Multishot Device. SPE Drill. Eng. 1990, 5, 209–214. [Google Scholar] [CrossRef]
- Ma, T.; Chen, P.; Zhao, J. Overview on vertical and directional drilling technologies for the exploration and exploitation of deep petroleum resources. Geomech. Geophys. Geo-Energy Geo-Resour. 2016, 2, 365–395. [Google Scholar] [CrossRef]
- Mantle, K. The Art of Controlling Wellbore Trajectory. Oilfield Rev. 2013, 25, 54–55. [Google Scholar]
- Felczak, E.; Torre, A.; Godwin, N.D.; Mantle, K.; Naganathan, S.; Hawkins, R.; Li, K.; Jones, S.; Slayden, F. The Best of Both Worlds—A Hybrid Rotary Steerable System. Oilfield Rev. 2011, 23, 36–44. [Google Scholar]
- De Almeida, I.N., Jr.; Antunes, P.D.; Gonzalez, F.O.C.; Yamachita, R.A.; Nascimento, A.; Goncalves, J.L. A Review of Telemetry Data Transmission in Unconventional Petroleum Environments Focused on Information Density and Reliability. J. Softw. Eng. Appl. 2015, 8, 455–462. [Google Scholar]
- Makohl, F.; Jurgens, R. Evolution and Differences of High-Performance Downhole Motors. In Proceedings of the SPE/IADC Drilling Conference, Dallas, TX, USA, 9–12 February 1986. [Google Scholar] [CrossRef]
- Russel, M.K.; Russel, A.W. Surveying of Boreholes. U.S. Patent 4,163,324, 7 August 1979. [Google Scholar]
- Downton, G.; Klausen, T.S.; Hendricks, A.; Pafities, D. New directions in rotary steerable drilling. Oilfield Rev. 2000, 26, 18–29. [Google Scholar]
- Schaaf, S.; Pafitis, D.; Guichemerre, E. Application of a Point the Bit Rotary Steerable System in Directional Drilling Prototype Well-bore Profiles. In Proceedings of the SPE/AAPG Western Regional Meeting, Long Beach, CA, USA, 19–22 June 2000. [Google Scholar] [CrossRef]
- Al Yami, H.; Kubaisi, A.; Nawaz, K.; Awan, A.H.; Verma, J.K.; Ganda, S. Powered Rotary Steerable Systems Offer a Step Change in Drilling Performance. In Proceedings of the SPE Asia Pacific Oil and Gas Conference and Exhibition, Perth, Australia, 20–22 October 2008. [Google Scholar] [CrossRef]
- Khudiri, M.; Al-Sanle, F.; Miyajan, R.; Wuhalmed, A.; Hawi, M.; Abbas, M.; Kashif, M.; Meraj, H.; Ahmed, F. Utilization of Single Real Time Data Visualization and Transmission Solution in Oil and Gas Field Development. In Proceedings of the Abu Dhabi International Petroleum Exhibition and Conference, Abu Dhabi, UAE, 9–12 November 2015. [Google Scholar] [CrossRef]
- Al-Suwaidi, S.; Lyngra, S.; Roberts, I.; Al-Hussain, J.; Pasaribu, I.; Laota, A.S.; Hutabarat, S. Successful Application of a Novel Mobility Geosteering Technique in a Stratified Low-Permeability Carbonate Reservoir. In Proceedings of the SPE Saudi Arabia Section Technical Symposium and Exhibition, Al-Khobar, Saudi Arabia, 19–22 May 2013. [Google Scholar] [CrossRef]
- Al-Maskeen, A.M.A.; Sung, R.R.; Ali, S.S. Horizontal Well Correlation Using Real Time Data and Log Prediction in Geosteering Complex Reservoirs of Saudi Arabia. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 10–13 March 2013. [Google Scholar] [CrossRef]
- Jamieson, A. Introduction to Wellbore Surveying. Available online: http://www.uhi.ac.uk/en/research-enterprise/energy/wellbore-positioning-download (accessed on 12 August 2017).
- Williamson, H.S. Accuracy Prediction for Directional Measurement While Drilling. SPE Drill. Complet. 2000, 15, 221–233. [Google Scholar] [CrossRef]
- James, T.L. Fundamentals of NMR; Department of Pharmaceutical Chemistry, University of California: San Francisco, CA, USA, 1998; pp. 1–31. [Google Scholar]
- Varian, R.H. Method and Means for Correlating Nuclear Properties of Atoms and Magnetic Fields. U.S. Patent 2,561,490, 21 October 1948. [Google Scholar]
- Schwede, H.F. Nuclear Resonance Well Logging Method and Apparatus. U.S. Patent 3,528,000, 5 March 1954. [Google Scholar]
- Brown, R.J.S.; Gamson, B.W. Nuclear Magnetism Logging; SPE-1305-G; Society of Petroleum Engineers: Houston, TX, USA, 1960; pp. 201–209. [Google Scholar]
- Brown, R.J.S. The Earth’s-field NML development at Chevron. Concepts Magn. Reson. 2001, 13, 344–366. [Google Scholar] [CrossRef]
- Kleinberg, R.L.; Jackson, J.A. An introduction to the history of NMR well logging. Concepts Magn. Reson. 2001, 13, 340–342. [Google Scholar] [CrossRef]
- Cooper, R.K.; Jackson, J.A. Remote (Inside-Out) NMR. I. Remote Production of a Region of Homogeneous Magnetic Field. J. Magn. Reson. 1980, 41, 400–405. [Google Scholar] [CrossRef]
- Burnett, L.J.; Jackson, J.A. Remote (Inside-Out) NMR. II. Sensitivity of NMR Detection for External Samples. J. Magn. Reson. 1980, 41, 406–410. [Google Scholar]
- Jackson, J.A.; Burnett, L.J.; Harmon, F. Remote (Inside-Out) NMR. III. Detection of Nuclear Magnetic Resonance in a Remotely Produced Region of Homogeneous Magnetic Field. J. Magn. Reson. 1980, 41, 411–421. [Google Scholar] [CrossRef]
- Lipsicas, M.; Banavar, J.R.; Willemsen, J. Surface relaxation and pore sizes in rocks-a nuclear magnetic resonance analysis. Appl. Phys. Lett. 1986, 48, 1554. [Google Scholar] [CrossRef]
- Borgia, G.C.; Fantazzini, P.; Mesini, E. Water 1H spin-lattice relaxation as a fingerprint of porous media. Magn. Reson. Imaging 1990, 8, 435–447. [Google Scholar] [CrossRef]
- Kleinberg, R.; Kenyon, W.; Mitra, P. Mechanism of NMR relaxation of fluids in rock. J. Magn. Reson. Ser. A 1994, 108, 206–214. [Google Scholar] [CrossRef]
- Mitra, P.P.; Sen, P.N.; Schwartz, L.M.; Le Doussal, P. Diffusion propagator as a probe of the structure of porous media. Phys. Rev. Lett. 1992, 68, 3555–3558. [Google Scholar] [CrossRef] [PubMed]
- Mair, R.W.; Wong, G.; Hoffmann, D.; Hürlimann, M.D.; Patz, S.; Schwartz, L.M.; Walsworth, R.L. Probing porous media with gas diffusion NMR. Phys. Rev. Lett. 1999, 83, 3324. [Google Scholar] [CrossRef] [PubMed]
- Hurlimann, M.; Helmer, K.G.; Latour, L.; Sotak, C.H. Restricted diffusion in sedimentary rocks. Determination of surface-area-to-volume ratio and surface relaxivity. J. Magn. Reson Ser. A 1994, 111, 169–178. [Google Scholar] [CrossRef]
- Mitra, P.P.; Sen, P.N.; Schwartz, L.M. Short-time behavior of the diffusion coefficient as a geometrical probe of porous media. Phys. Rev. B 1993, 47, 8565. [Google Scholar] [CrossRef]
- Prammer, M.; Drack, E.D.; Bouton, J.C.; Gardner, J.S.; Coates, G.R.; Chandler, R.N.; Miller, M.N. Measurements of Clay-Bound Water and Total Porosity by Magnetic Resonance Logging; SPE-36522-MS; Society of Petrophysicists and Well-Log Analysts: Houston, TX, USA, 1996. [Google Scholar] [CrossRef]
- Hürlimann, M.; Flaum, M.; Venkataramanan, L.; Flaum, C.; Freedman, R.; Hirasaki, G. Diffusion-relaxation distribution functions of sedimentary rocks in different saturation states. Magn. Reson. Imaging 2003, 21, 305–310. [Google Scholar] [CrossRef]
- Borgia, G.C.; Brown, R.J.S.; Fantazzini, P. Uniform-penalty inversion of multiexponential decay data. J. Magn. Reson. 1998, 132, 65–77. [Google Scholar] [CrossRef] [PubMed]
- Venkataramanan, L.; Song, Y.Q.; Hurlimann, M.D. Solving Fredholm integrals of the first kind with tensor product structure in 2 and 2.5 dimensions. IEEE Trans. Signal Process. 2002, 50, 1017–1026. [Google Scholar] [CrossRef]
- Hürlimann, M.D.; Venkataramanan, L. Quantitative measurement of two-dimensional distribution functions of diffusion and relaxation in grossly inhomogeneous fields. J. Magn. Reson. 2002, 157, 31–42. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.-Q.; Venkataramanan, L.; Hürlimann, M.D.; Flaum, M.; Frulla, P.; Straley, C. T(1)-T(2) correlation spectra obtained using a fast two-dimensional Laplace inversion. J. Magn. Reson. 2002, 154, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.-Q.; Venkataramanan, L.; Kausik, R.; Heaton, N. Diffusion NMR of Confined Systems: Fluid Transport in Porous Solids and Heterogeneous Materials; Valiullin, R., Ed.; RSC: London, UK, 2016; Chapter 4; pp. 111–155. [Google Scholar]
- Blümich, B.; Blümler, P.; Eidmann, G.; Guthausen, A.; Haken, R.; Schmitz, U.; Saito, K.; Zimmer, G. The NMR-mouse: Construction, excitation, and applications. Magn. Reson. Imaging 1998, 16, 479–484. [Google Scholar] [CrossRef]
- Balibanu, F.; Hailu, K.; Eymael, R.; Demco, D.; Blumich, B. Nuclear magnetic resonance in inhomogeneous magnetic fields. J. Magn. Reson. 2000, 145, 246–258. [Google Scholar] [CrossRef] [PubMed]
- Blümich, B.; Anferov, V.; Anferova, S.; Klein, M.; Fechete, R.; Adams, M.; Casanova, F. Simple NMR-mouse with a bar magnet. Concepts Magn. Reson. 2002, 15, 255–261. [Google Scholar] [CrossRef]
- Blümich, B.; Anferov, V.; Anferova, S.; Klein, M.; Fechete, R. An NMR-MOUSE-for analysis of thin objects, Macromol. Mater. Eng. 2003, 288, 312–317. [Google Scholar]
- Casanova, F. Two-dimensional imaging with a single-sided NMR probe. J. Magn. Reson. 2003, 163, 38–45. [Google Scholar] [CrossRef]
- Blümich, B.; Casanova, F.; Perlo, J.; Anferova, S.; Anferov, V.; Kremer, K.; Goga, N.; Kupferschläger, K.; Adams, M. Advances of unilateral mobile NMR in nondestructive materials testing. Magn. Reson. Imaging 2005, 23, 197–201. [Google Scholar] [CrossRef] [PubMed]
- Todica, M.; Fechete, R.; Blümich, B. Selective NMR excitation in strongly inhomogeneous magnetic fields. J. Magn. Reson. 2003, 164, 220–227. [Google Scholar] [CrossRef]
- Hürlimann, M.D.; Griffin, D.D. Spin dynamics of Carr-Purcell-Meiboom-Gilllike sequences in grossly inhomogeneous B(0) and B(1) fields and application to NMR well logging. J. Magn. Reson. 2000, 143, 120–135. [Google Scholar] [CrossRef] [PubMed]
- Hürlimann, M.D. Diffusion and relaxation effects in general stray field NMR experiments. J. Magn. Reson. 2001, 148, 367–378. [Google Scholar] [CrossRef] [PubMed]
- Hürlimann, M.; Venkataramanan, L.; Flaum, C. Diffusion-editing: New NMR measurement of saturation and pore geometry. In Proceedings of the 43rd Annual SPWLA Meeting, Oiso, Japan, 2–5 June 2002. [Google Scholar]
- Leu, G.; Fordham, E.J.; Hürlimann, M.D.; Frulla, P. Fixed and pulsed gradient diffusion methods in low-field core analysis. Magn. Reson. Imaging 2005, 23, 305–309. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.Q. Categories of coherence pathways for the CPMG sequence. J. Magn. Reson. 2002, 157, 82–91. [Google Scholar] [CrossRef] [PubMed]
- Prammer, M.G.; Drack, E.; Goodman, G.; Masak, P.; Menger, S.; Morys, M.; Zannoni, S.; Suddarth, B.; Dudley, J. The Magnetic-Resonance While Drilling Tool: Theory and Operation. SPE Reserv. Eval. Eng. 2001, 4, 270–275. [Google Scholar] [CrossRef]
- Alvarado, R.J.; Damgaard, A.; Hansen, P.; Raven, M.; Heidler, R.; Hoshun, R.; Kovats, J.; Morriss, C.; Rose, D.; Wendt, W. Nuclear Magnetic Resonance Logging While Drilling. Oilfield Rev. 2003, 15, 40–51. [Google Scholar]
- Allen, D.; Flaum, C.; Ramakrishnan, T.S.; Bedford, J.; Castelijns, K.; Fairhurst, D.; Gubelin, G.; Heaton, N.; Minh, C.C.; Norville, M.A.; et al. Trends in NMR Logging. Oilfeild Rev. 2000, 12, 2–19. [Google Scholar]
- Prammer, M.G.; Goodman, G.D.; Menger, S.K.; Morys, M.; Zannoni, S.; Dudley, J.H. Field Test of an Experimental NMR LWD Device. In Proceedings of the SPWLA 41st Annual Logging Symposium, Dallas, TX, USA, 4–7 June 2000. [Google Scholar]
- Heidler, R.; Morriss, C.; Hoshun, R. Design and Implementation of a New Magnetic Resonance Tool for the While Drilling Environment. In Proceedings of the SPWLA 44th Annual Logging Symposium, Galveston, TX, USA, 22–25 June 2003. [Google Scholar]
- Borghi, M.; Porrera, F.; Lyne, A.; Kruspe, T.; Krueger, V. Magnetic Resonance Logging While Drilling Streamlines Reservoir Evaluation. In Proceedings of the SPWLA 46th Annual Logging Symposium, New Orleans, LA, USA, 26–29 June 2005. [Google Scholar]
- Blanz, M.; Kruspe, T.; Thern, H.F.; Kurz, G.A. Nuclear Magnetic Resonance Logging While Drilling (NMR-LWD): From an Experiment to a Day-to-Day Service for the Oil Industry. Available online: www.diffusion-fundamentals.org (accessed on 12 August 2017).
- Evseev, N.; Dinariev, O.; Hurlimann, M.; Safanov, S. Coupling Multiphase Hydrodynamic and NMR Pore-Scale Modeling for Advanced Characterization of Saturated Rocks. Petrophysics 2015, 56, 32–44. [Google Scholar]
- Kurup, A.; Valori, A.; Bachman, H.N.; Korb, J.-P.; Hürlimann, M.; Zielinski, L. Frequency Dependent Magnetic Resonance Response of Heavy Crude Oils: Methods and Applications. In Proceedings of the SPE Saudi Arabia Section Technical Symposium and Exhibition, Al-Khobar, Saudi Arabia, 19–22 May 2013. [Google Scholar] [CrossRef]
- Hürlimann, M.D.; Freed, D.E.; Zielinski, L.J.; Song, Y.Q.; Leu, G.; Straley, C.; Boyd, A.; Minh, C.C. Hydrocarbon Composition From NMR Diffusion And Relaxation Data. Petrophysics 2009, 50, 116–129. [Google Scholar]
- Carneiro, G.; Souza, A.; Boyd, A.; Schwartz, L.; Song, Y.Q.; Azeredo, R.; Willian, T.; Santos, B.; Rios, E.; Machado, V. Evaluating Pore Space Connectivity by NMR Diffusive Coupling. In Proceedings of the SPWLA 55th Annual Logging Symposium, Abu Dhabi, UAE, 18–22 May 2014. [Google Scholar]
- Veselinovic, D.; Green, D.; Dick, M. Determination of Natural Fracture Porosity Using NMR. In Proceedings of the Unconventional Resources Technology Conference, San Antonio, TX, USA, 1–3 August 2016. [Google Scholar] [CrossRef]
- Veselinovic, D.; Green, D.; Dick, M. NMR at Different Temperatures to Evaluate Shales. In Proceedings of the Unconventional Resources Technology Conference, Austin, TX, USA, 24–26 July 2017. [Google Scholar]
- Mandal., S.; Borneman, T.W.; Koroleva, V.D.M.; Hürlimann, M.D. Direct optimization of signal-to-noise ratio of CPMG-like sequences in inhomogeneous fields. J. Magn. Reson. 2014, 247, 54–66. [Google Scholar] [CrossRef] [PubMed]
- Kausik, R.; Hürlimann, M.D. Sensitivity and resolution of two-dimensional NMR diffusion-relaxation measurements. J. Magn. Reson. 2016, 270, 12–23. [Google Scholar] [CrossRef] [PubMed]
- Mutalib, K.H.; Han, M.; Khoo, C.Y.; Lee, S.S.; Lwin, M.M.; Wong, F.K. LWD NMR for Hydrocarbon Typing and Formation Evaluation in a Challenging Offshore Trajectory. In Proceedings of the SPE/IATMI Asia Pacific Oil & Gas Conference and Exhibition, Nusa Dua, Bali, Indonesia, 20–22 October 2015. [Google Scholar] [CrossRef]
- Bachman, N.; Jain, V.; Gunawan, Y.; Bonningue, P.; Hazboun, N.; Kuptsov, K.; Teran, N.; Bastidas, M.; Morales, O.; Sanchez, F.M.; et al. A New Large Hole Nuclear Magnetic Resonance Logging While Drilling Tool for Early Stage Formation Evaluation. In Proceedings of the SPWLA 57th Annual Logging Symposium, Reykjavik, Iceland, 25–29 June 2016. [Google Scholar]
- Abouzaid, A.; Thern, H.; Said, M.; ElSaqqa, M.; Elbastawesy, M.; Ghozlan, S. Nuclear Magnetic Resonance Logging While Drilling in Complex Lithology—Solution for a Glauconitic Sandstone Reservoir. In Proceedings of the SPE/AAPG Africa Energy and Technology Conference, Nairobi City, Kenya, 5–7 December 2016. [Google Scholar]
- Kuptsov, K.; Griffiths, R.; Maggs, D. Magnetic Resonance-While-Drilling System Improves Understanding of Complex Reservoirs. J. Pet. Technol. 2015, 67, 26–29. [Google Scholar] [CrossRef]
- Heaton, N.J.; Jain, V.; Boling, B.; Oliver, D.; Degrange, J.M.; Ferraris, P.; Hupp, D.; Prabawa, H.; Torres, M.T.; Vervest, E.; et al. New Generation Magnetic Resonance While Drilling. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 8–10 October 2012. [Google Scholar] [CrossRef]
- Coman, R.; Tietjen, H.; Thern, H.; Blanz, M. New Large-Hole Magnetic Resonance Logging-While-Drilling Tool with Short Inter-Echo Time and Improved Vertical Resolution. In Proceedings of the SPWLA 55th Annual Logging Symposium, Abu Dhabi, UAE, 18–22 May 2014. [Google Scholar]
- Akkurt, R.; Kersey, D.; Zainalabedin, K. Towards Everyday-NMR: An Operator’s Perspective. Petrophysics 2009, 50, 498–510. [Google Scholar]
- Seifert, D.J.; Akkurt, R.; Al-Dossary, S.; Shokeir, R.; Ersoz, H. Nuclear Magnetic Resonance Logging: While Drilling, Wireline and Fluid Sampling. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 11–14 March 2007. [Google Scholar] [CrossRef]
- Freedman, R. Advances in NMR Logging. J. Pet. Technol. 2006, 58, 60–66. [Google Scholar] [CrossRef]
- Akkurt, R.; Bachman, H.N.; Minh, C.C.; Flaum, C.; LaVigne, J.; Leveridge, R.; Carmona, R.; Crary, S.; Decoster, E.; Heaton, N.; et al. Nuclear Magnetic Resonance Comes Out of Its Shell. Oilfield Rev. 2009, 20, 4–23. [Google Scholar]
- Kanfar, M. Real-Time Integrated Petrophysics: Geosteering in Challenging Geology and Fluid Systems. In Proceedings of the SPE Saudi Arabia section Young Professionals Technical Symposium, Dhahran, Saudi Arabia, 19–21 March 2012. [Google Scholar] [CrossRef]
- Kharraa, H.S.; Al-Amri, M.A.; Mahmoud, M.A.; Okasha, T.M. Assessment of Uncertainty in Porosity Measurements Using NMR and Conventional Logging Tools in Carbonate Reservoir. In Proceedings of the SPE Saudi Arabia Section Technical Symposium and Exhibition, Al-Khobar, Saudi Arabia, 19–22 May 2013. [Google Scholar] [CrossRef]
- Menger, S.; Sands, P. NMR in Motion. Petrophysics 2003, 44, 190–195. [Google Scholar]
- Kruspe, T.; Thern, H.F.; Kurz, G.; Blanz, M.; Akkurt, R.; Ruwaili, S.; Seifert, D.; Marsala, A. Slimhole Application of Magnetic Resonance while Drilling. In Proceedings of the SPWLA 50th Annual Logging Symposium, The Woodlands, TX, USA, 21–24 June 2009. [Google Scholar]
- Hursan, G.; Silva, A.; Zeglache, M.L. Evaluation and Development of Complex Clastic Reservoirs using NMR. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, UAE, 26–28 September 2016. [Google Scholar] [CrossRef]
- Hursan, G.; Deering, J.S.; Kelly, F.N. NMR Logs Help Formation Testing and Evaluation. In Proceedings of the SPE Saudi Arabia Section Annual Technical Symposium and Exhibition, Al-Khobar, Saudi Arabia, 21–23 April 2015. [Google Scholar] [CrossRef]
- Meridji, Y.; Hursan, G.; Mahmoud, E.; Balliet, R. Fluid Identification in Complex Clastic Reservoirs Using 2D NMR Maps: A Case Study From Saudi Arabia. In Proceedings of the SPE Saudi Arabia Section Technical Symposium and Exhibition, Al-Khobar, Saudi Arabia, 19–22 May 2013. [Google Scholar] [CrossRef]
- Akkurt, R.; Marsala, A.F.; Seifert, D.; Al-Harbi, A.; Buenrostro, C.; Kruspe, T.; Thern, H.F.; Kurz, G.; Blanz, M.; Kroken, A. Collaborative Development of a Slim LWD NMR Tool: From Concept to Field Testing. In Proceedings of the SPE Saudi Arabia Section Technical Symposium, Al-Khobar, Saudi Arabia, 9–11 May 2009. [Google Scholar] [CrossRef]
- Decoster, E.; Carmona, R. Application of Recent Nmr Developments To The Characterization Of Orinoco Belt Heavy Oil Reservoirs. In Proceedings of the 49th Annual Logging Symposium, Austin, TX, USA, 25–28 May 2008. [Google Scholar]
- Ramos, H.G.; Ribeiro, A.L. Present and Future Impact of Magnetic Sensors in NDE. Procedia Eng. 2014, 86, 406–419. [Google Scholar] [CrossRef]
- Koch, R.H.; Deak, J.G.; Grinstein, G. Fundamental limits to magnetic field sensitivity of fluxgate magnetic sensors. Appl. Phys. Lett. 1999, 75, 3862. [Google Scholar] [CrossRef]
- Korepanov, V.; Marusenkov, A. Flux-Gate Magnetometers Design Peculiarities. Surv. Geophys. 2012, 33, 1059–1079. [Google Scholar] [CrossRef]
- Deak, J.G.; Zhou, Z.; Shen, W. Tunneling magnetoresistance sensor with pT level 1/f magnetic noise. AIP Adv. 2017, 7, 056676. [Google Scholar] [CrossRef]
- Reig, C.; Cardoso, S.; Mukhopadhyay, S.C. Giant Magnetoresistance Sensors—From basis to state-of-the-art applications. In Smart Sensors Measurement and Instrumentation; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent Developments of Magnetoresistive Sensors for Industrial Applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef] [PubMed]
- Gooneratne, C.P.; Kodzius, R.; Li, F.; Foulds, I.G.; Kosel, J. On-Chip Magnetic Bead Manipulation and Detection Using a Magnetoresistive Sensor-Based Micro-Chip: Design Considerations and Experimental Characterization. Sensors 2016, 16, 1369. [Google Scholar] [CrossRef] [PubMed]
- Cubells-Beltrán, M.D.; Reig, C.; Madrenas, J.; De Marcellis, A.; Santos, J.; Cardoso, S.; Freitas, P.P. Integration of GMR Sensors with Different Technologies. Sensors 2016, 16, 939. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gooneratne, C.P.; Liang, C.; Giouroudi, I.; Kosel, J. An integrated micro-chip for rapid detection of magnetic particles. J. Appl. Phys. 2012, 111, 07B327. [Google Scholar] [CrossRef]
- Slatter, R. Magnetoresistive (MR) Sensors for Angle-, Path- and Current Measurement in Harsh Environments. In Proceedings of the 17th International Conference on Sensors and Measurement Technology, Nürnberg, Germany, 19–21 May 2015. [Google Scholar] [CrossRef]
- Wang, Y.; Wen, G.; Chen, H. Horizontal Directional Drilling-Length Detection Technology While Drilling Based on Bi-Electro-Magnetic Sensing. Sensors 2017, 17, 967. [Google Scholar] [CrossRef] [PubMed]
- Verpillat, F.; Ledbetter, M.P.; Xu, S.; Michalak, D.J.; Hilty, C.; Bouchard, L.-S.; Antonijevic, S.; Budker, D. Remote detection of nuclear magnetic resonance with an anisotropic magnetoresistive sensor. Proc. Natl. Acad. Sci. USA 2008, 105, 2271–2273. [Google Scholar] [CrossRef] [PubMed]
- Ramsden, E. Hall Effect Sensors—Theory and Applications, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Paun, M.-A.; Sallese, J.-M.; Kayal, M. Hall Effect Sensors Design, Integration and Behavior Analysis. J. Sens. Actuator Netw. 2013, 2, 85–97. [Google Scholar] [CrossRef]
- Koide, S.; Takahashi, H.; Abderrahmane, A.; Shibasaki, I.; Sandhu, A. High Temperature Hall sensors using AlGaN/GaN HEMT Structures. J. Phys. Conf. Ser. 2012, 352, 012009. [Google Scholar] [CrossRef]
- Jankowski, J.; El-Ahmar, S.; Oszwaldowski, M. Hall Sensors for Extreme Temperatures. Sensors 2011, 11, 876–885. [Google Scholar] [CrossRef] [PubMed]
- Abderrahmane, A.; Koide, S.; Sato, S.I.; Ohshima, T.; Sandhu, A.; Okada, H. Robust Hall Effect Magnetic Field Sensors for Operation at High Temperatures and in Harsh Radiation Environments. IEEE Trans. Magn. 2012, 48, 4421–4423. [Google Scholar] [CrossRef]
- Lu, H.; Sandvik, P.; Vertiatchikh, A.; Tucker, J.; Elasser, A. High temperature Hall effect sensors based on AlGaN/GaN heterojunctions. J. Appl. Phys. 2006, 99, 114510. [Google Scholar] [CrossRef]
- Mahdi, A.E.; Panina, L.; Mapps, D. Some new horizons in magnetic sensing: High-Tc SQUIDs, GMR and GMI materials. Sens. Actuators A Phys. 2003, 105, 271–285. [Google Scholar] [CrossRef]
- Nishibe, Y.; Ohta, N. Thin Film Magnetic Sensor Utilizing Magneto Impedance Effect. Sens. Actuators A Phys. 2000, 82, 155–160. [Google Scholar] [CrossRef]
- Li, B.; Kavaldzhiev, M.N.; Kosel, J. Flexible magnetoimpedance sensor. J. Magn. Magn. Mater. 2015, 378, 499–505. [Google Scholar] [CrossRef]
- Li, B.; Yassine, O.; Kosel, J. A surface acoustic wave passive and wireless sensor for magnetic fields, temperature, and humidity. IEEE Sens. J. 2015, 15, 453–462. [Google Scholar] [CrossRef]
- Li, B.; Kosel, J. A thin film passive magnetic field sensor operated at 425 MHz. In Proceedings of the Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013. [Google Scholar] [CrossRef]
- Mohri, K.; Uchiyama, T.; Panina, L.V.; Yamamoto, M.; Bushida, K. Recent Advances of Amorphous Wire CMOS IC Magneto-Impedance Sensors: Innovative High-Performance Micromagnetic Sensor Chip. J. Sens. 2015, 2015, 718069. [Google Scholar] [CrossRef]
- Kurniawan, M.; Roy, R.K.; Panda, A.K.; Greve, D.W.; Ohodnicki, P.R., Jr.; McHenry, M.E. Interplay of stress, temperature, and giant magnetoimpedance in amorphous soft magnets. Appl. Phys. Lett. 2014, 105, 222407. [Google Scholar] [CrossRef]
- AICHI STEEL. Available online: https://www.aichi-steel.co.jp (accessed on 12 August 2017).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Range | Sensitivity | Linearity | Temperature Coefficient | Size | Noise | Frequency |
|---|---|---|---|---|---|---|
| 10 pT–2 mT | 20–50 mV/μT | <10 ppm | 0.25 nT/°C | mm | 15 pT/√Hz | 10 kHz |
| Temperature | Pressure | pH | Vibration | Shock |
|---|---|---|---|---|
| 125–230 °C | 15,000–30,000 psi | 2–5 | 30 g peak at 50–1000 Hz | 1000 g, 0.5 ms, Half sine |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gooneratne, C.P.; Li, B.; Moellendick, T.E. Downhole Applications of Magnetic Sensors. Sensors 2017, 17, 2384. https://doi.org/10.3390/s17102384
Gooneratne CP, Li B, Moellendick TE. Downhole Applications of Magnetic Sensors. Sensors. 2017; 17(10):2384. https://doi.org/10.3390/s17102384
Chicago/Turabian StyleGooneratne, Chinthaka P., Bodong Li, and Timothy E. Moellendick. 2017. "Downhole Applications of Magnetic Sensors" Sensors 17, no. 10: 2384. https://doi.org/10.3390/s17102384
APA StyleGooneratne, C. P., Li, B., & Moellendick, T. E. (2017). Downhole Applications of Magnetic Sensors. Sensors, 17(10), 2384. https://doi.org/10.3390/s17102384