1. Introduction
Magnetic field gradients (MFGs) are the variations of magnetic fields per unit length in three-dimensional space [
1]. Magnetic gradient sensors are a key member of the magnetic sensor family, featuring a unique and strong ability to suppress ambient (i.e., common-mode) noise by detecting MFGs [
1,
2]. They generally consist of two magnetic field sensors spatially separated by a baseline to detect MFGs by differencing the output signals of the two magnetic field sensors over the baseline. This distinct noise-suppression ability has enabled magnetic gradient sensors to play an increasingly crucial role in outdoor environments and critical applications involving high ambient noise. Some typical examples include geomagnetic mapping, magnetic anomaly detection, magnetic navigation, magnetic object positioning, electric grid current sensing, transportation condition monitoring, medical diagnosis, and non-destructive evaluation [
1,
2,
3,
4,
5,
6]. To this extent, it is highly desirable to develop passive (i.e., power-free), small-scale, and high-performance magnetic gradient sensors possessing simultaneously high detection sensitivity, strong common-mode magnetic field noise rejection rate, small input-output nonlinearity, and low gradient noise over a broad frequency range under a small baseline.
To date, most of the existing magnetic gradient sensors use fluxgate elements, Hall elements, and superconducting quantum interference devices (SQUIDs) as the magnetic field sensors [
7,
8,
9,
10,
11,
12]. The fluxgate gradient sensors can generally achieve a high detection sensitivity of ~10 V/(T/m) and a low gradient noise of ~10 nT/m/
(at 1 Hz) at the expense of requiring an AC excitation current supply, a low-noise low-drift signal modulator, and a large baseline (>0.1 m) to sustain their operations [
7,
8]. The Hall gradient sensors, because of the inherently weak Hall voltages (<10 V/T) and high semiconductor noise (>0.1 μV/
) in their Hall elements, usually have a lower detection sensitivity of <0.1 V/(T/m) and a higher gradient noise of >1 μT/m/
(at 1 Hz). Moreover, they need a highly stable DC current supply to excite the Hall effect and a high-quality signal conditioner to process the weak Hall voltages under noise [
9,
10,
11]. The SQUID gradient sensors are sensitive enough to detect MFGs down to ~10 fT/m with a very low gradient noise of ~10 fT/m/
(at 1 Hz). However, the practical necessity of equipping a bulky cryogenic system to assure superconductivity significantly restricts them to be laboratory equipment [
12,
13].
ME composites, owing to their unique ability to directly induce interestingly large ME voltages in excess of 100 times over the Hall voltages without the support of external power supplies, signal conditioners, and/or other auxiliary means as normally required in the fluxgate elements, Hall elements, and SQUIDs, have received considerable research and application attention as highly-sensitive passive sensors for AC magnetic field and electric current detections over the past decade [
14,
15,
16,
17,
18,
19]. Recently, reports connecting between ME composites and MFG detection have occurred [
20,
21,
22,
23,
24]. MFG-based DC ME sensors have been studied by exciting Terfenol-D/PZT or Ni/PZT ME heterostructures with an AC resonance voltage to induce an AC magnetic field in accordance with the converse ME effect and by interacting this AC magnetic field with the DC magnetic field to be measured so as to produce an MFG and, hence, a shift in resonance frequency and a change in both output voltage and phase angle [
20,
21,
22,
23,
24]. An ME gradient technique for suppressing ambient noise has been investigated by using two Metglas/PZT/Metglas trilayer ME composites to detect magnetic fields at two different locations on the basis of the ME effect and by feeding the corresponding ME voltages into two separate channels of a data logger interfaced with a MATLAB-based differential program for post-processing [
25]. While effective, there does not appear to be any solid work on applying or advancing the ME gradient technique to realize standalone (i.e., intrinsic) ME gradient sensors for the passive and direct detection of MFGs into electrical voltages in the absence of any auxiliary software and/or hardware for post-processing differentiation.
In view of the above, we have developed and reported the basic detection performance of a small-scale and standalone ME transverse gradient sensor capable of detecting transverse MFGs into electrical voltages by combining the passive and direct ME conversion ability enabled by the ME effect with the ambient noise suppression ability facilitated by the MFG technique in a pair of plate-shaped and magnet-biased Terfenol-D/PZT/Terfenol-D trilayer ME composites [
26]. This gradient sensor is essentially a transverse-type MFG sensor for detecting MFGs transverse to its length in the axial direction, which is analogous to transverse-type Hall probes for detecting magnetic fields, transverse to their length in the axial direction. In fact, the development of the transverse gradient sensors is important to compromise the application inconvenience and limitation in axial gradient sensors, such as detection of MFGs in gaps with limited space. It can also open up opportunities to furnish full tensor gradient sensors by combining transverse gradient sensors with axial gradient sensors.
In this paper, the theoretical and experimental details on the design, modeling, and evaluation of the ME transverse gradient sensor are disclosed. The governing equations, boundary conditions, and modeling process for implementing multiphysics finite element analysis (FEA) are provided. A representative gradient sensor having a baseline as small as 35 mm is demonstrated, and its performance is characterized in a magnetically-unshielded laboratory environment, in terms of detection sensitivity, common-mode magnetic field noise rejection rate, input-output nonlinearity, and gradient noise. A comprehensive analysis of the experimental gradient noise spectra is carried out to study the contribution of various noise types to the ambient noise associated with the gradient sensor.
2. Configuration, Structure, and Prototype
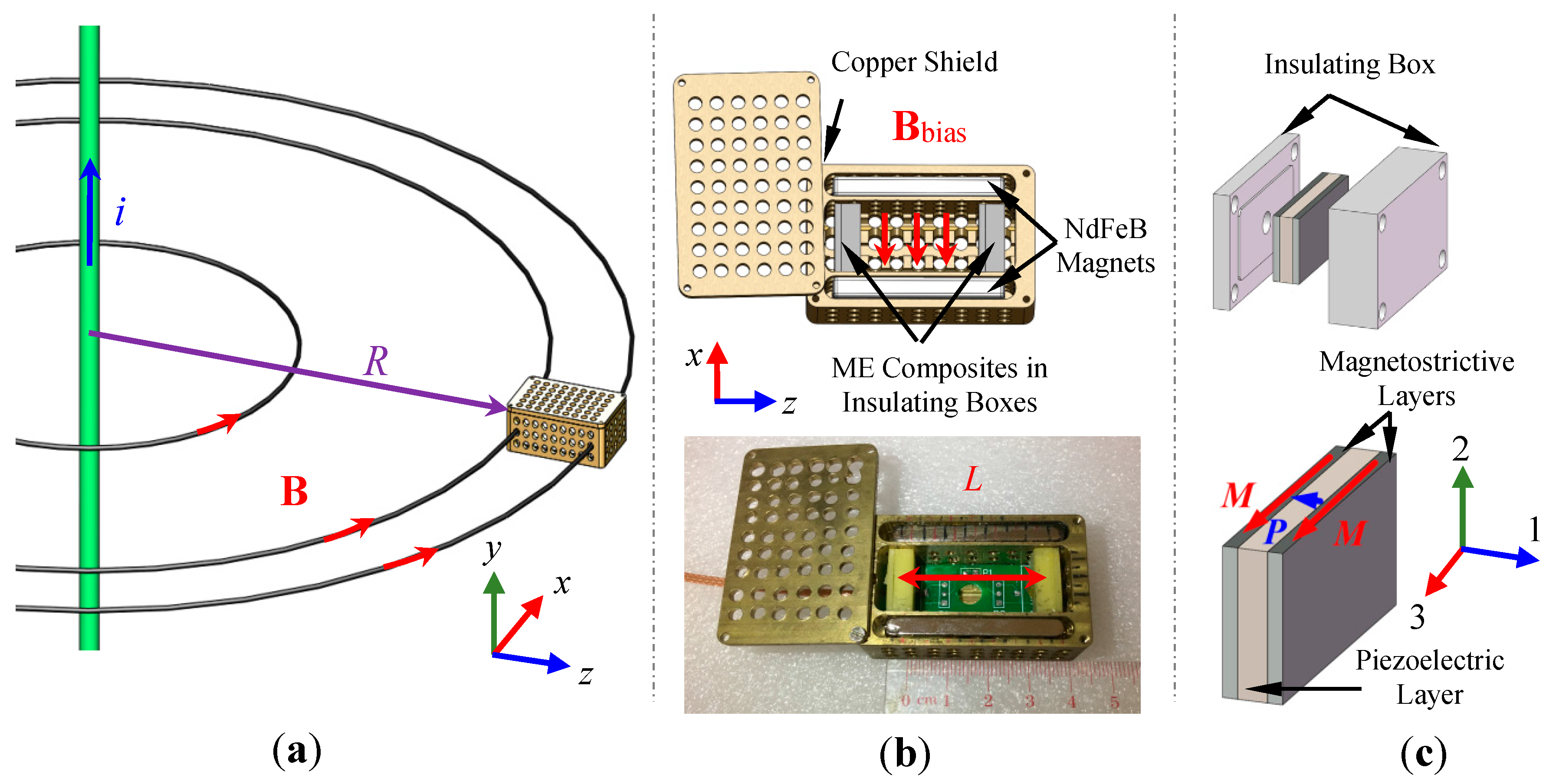
Figure 1 shows the configuration, structure, and prototype of the proposed ME transverse gradient sensor. The gradient sensor consists of a pair of plate-shaped Terfenol-D/PZT/Terfenol-D trilayer ME composites mechanically enclosed in two separate insulating boxes with Superwool surrounding and magnetically biased by a pair of NdFeB magnets in a copper shield. The two mechanically enclosed ME composites were oriented in the transverse (
x-) direction, separated with a baseline (
L = 35 mm) in the axial (
z-) direction, and biased by the two NdFeB magnets with an average DC magnetic field (
= 56 mT) in the transverse (
x-) direction, all with reference to the length of the gradient sensor in the axial (
z-) direction. The copper shield was grounded and drilled with holes of 3.2 mm diameter in an array form to minimize the influence of ambient electric fields. The ME composites were prepared by bonding a layer of PZT (Pb(Zr, Ti)O
3, Ceram-Tec P8) piezoelectric (PE) ceramic plate of 12 mm length, 6 mm width, and 1 mm thickness between two layers of [112]-textured Terfenol-D (Tb
0.3Dy
0.7Fe
1.92, Baotou Rare Earth, Baotou, China) magnetostrictive (MS) alloy plates of the same dimensions in the thickness (1-) direction (
Figure 1c). The magnetization (
M) direction of the Terfenol-D plates and the polarization (
P) direction of the PZT plate were oriented in their length (3-) and thickness (1-) directions, respectively. A total of ten ME composite samples were prepared, and two of the most similar ones in terms of ME properties were deliberately selected to form the ME composite pair in the gradient sensor so as to reduce the difference in ME voltage coefficient to <3%. Two NdFeB magnet plates, each of 40 mm length, 15 mm width, and 5 mm thickness, were arranged in the axial (
z-) direction to bias the ME composites along their length (3-) direction at
= 56 mT. The negative electrode surface of the PZT plate in the two ME composites was connected together to form a back-to-back capacitor configuration, while the positive electrode surface of the first and second PZT plates was connected to the signal core and ground shield of the coaxial cable with BNC termination, respectively. Therefore, the output voltage of the gradient sensor as measured at the BNC termination was essentially the transverse MFG-induced difference in ME voltage between the two ME composites and was directly calibrated against transverse MFGs to give the detection sensitivity characterized by a unit voltage output per unit transverse MFG input. It is noted that our gradient sensor is essentially a small-scale and standalone device, which completely gets rid of the software and hardware necessarily for post-processing differentiation in the previously reported ME gradient technique [
25].
4. Performance Evaluation, Results, and Discussion
In this section, the directional subscripts
i,
j used in
Section 3 are designated to be
x and
z in regard to the structure and configuration of our ME transverse gradient sensor in
Figure 1a. For simplicity, we use
,
,
,
,
, and
to represent
,
,
,
,
, and
in the following discussion. In
Section 4.1 and
Section 4.2, the FEA is implemented in a commercial multiphysics simulation software. (COMSOL Multiphysics
® version 5.2a released by COMSOL Inc. Stockholm, Sweden) The FEM models are implemented in five steps, including: (1) building geometry in accordance with experimental configuration; (2) mesh generation and optimization; (3) setting material properties; (4) multiphysics coupling of magnetic field, solid mechanics, electrostatics, and electrical circuit modules; and (5) configuring solvers and processing calculated results. The governing equations of the above modules, which have been presented and discussed in
Section 3, are applied to create two FEA models for the evaluation of the ME voltage coefficients of the two ME composites and for the calibration of the detection sensitivity of the gradient sensor in accordance with the respective experimental arrangements using the frequency-dependent solver of COMSOL Multiphysics
®. The material parameters of Terfenol-D and PZT, as shown in
Table 1 and
Table 2, respectively, are employed for the FEA. The calculated results are compared with the measured results for further discussion. In
Section 4.3, the voltage noise density spectra and gradient noise spectra of the two ME composites and the gradient sensor are evaluated experimentally. A special focus is put on revealing the contribution of various types of noise to the ambient noise associated with the gradient sensor.
4.1. Evaluation of ME Voltage Coefficient Spectra
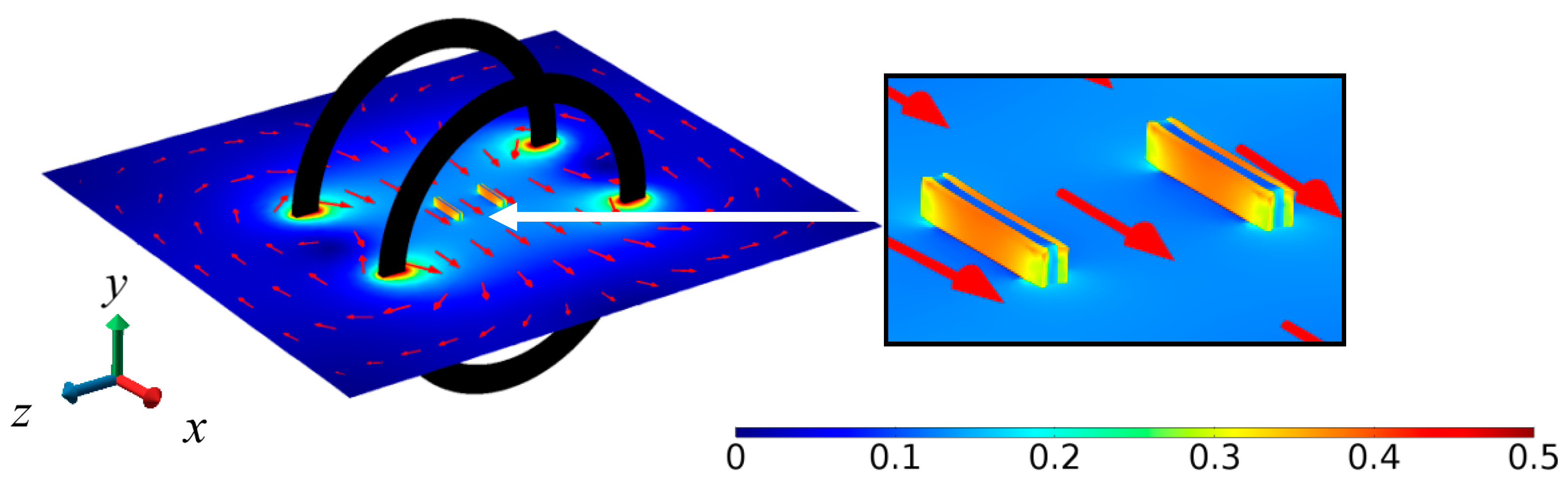
Figure 2 shows the FEA result of magnetic field (
) distribution in the central
x–z plane involving the two ME composites separated by a baseline (
L) of 35 mm in the axial (
z-) direction and under the excitation of a pair of Helmholtz coils with
= 0.125 mT at
f = 1 kHz in the transverse (
x-) direction in accordance with the experimental setup for the evaluation of the ME voltage coefficient spectra to be discussed in
Figure 3. The zoomed-in view in the vicinity of the two ME composites indicates an in-phase deformation of the ME composites with a uniform
generated by the Helmholtz coils in the transverse (
x-) direction.
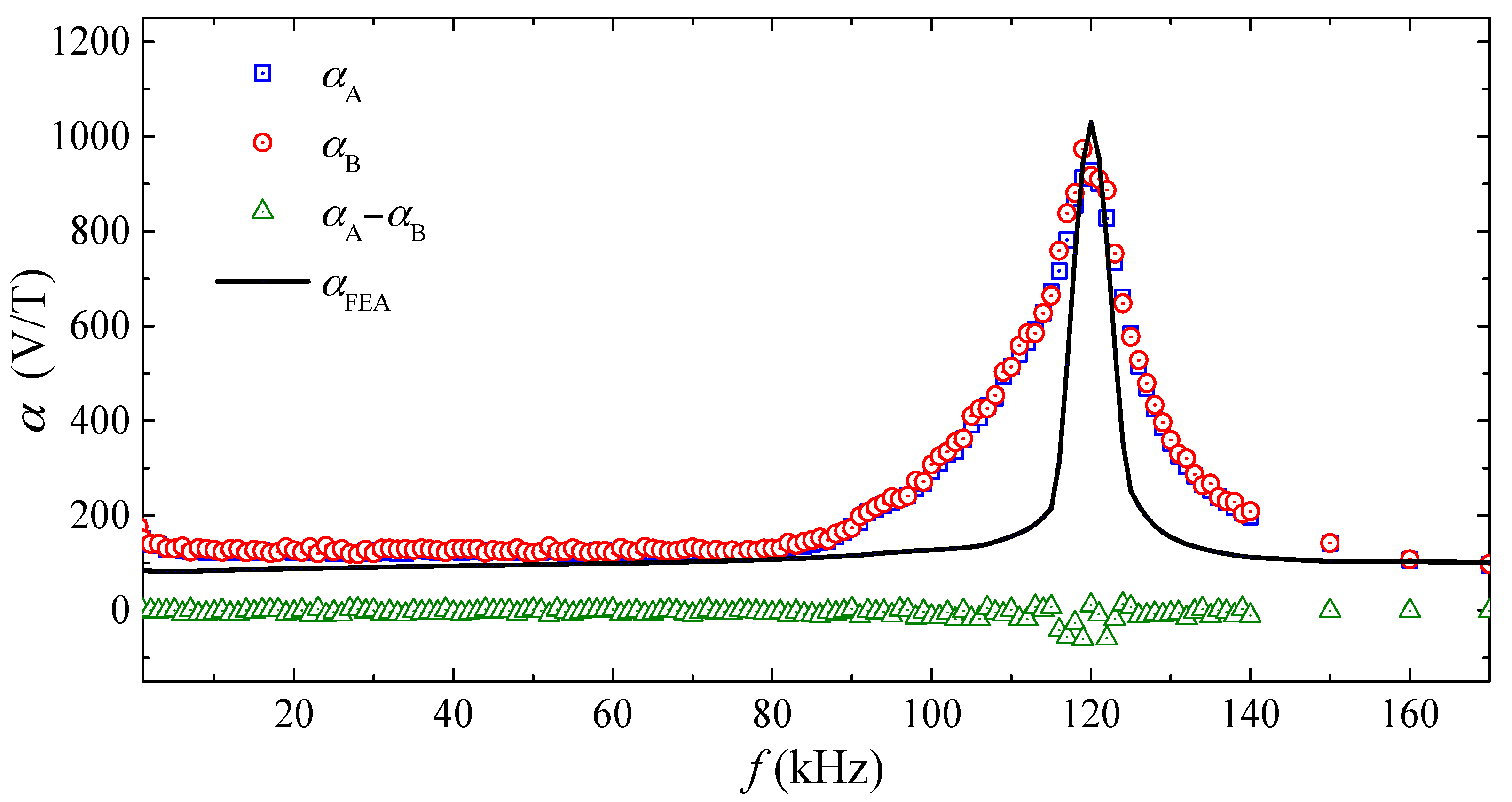
Figure 3 plots the frequency (
f) dependence of the measured ME voltage coefficients of the two ME composites (
and
) and their difference (
) for comparison with that of the ME voltage coefficient calculated from FEA (
). The
and
spectra were evaluated by producing an AC reference voltage of constant amplitude over the prescribed
f range of 1 Hz–170 kHz using a lock-in amplifier (SRS SR865); by converting and amplifying the AC reference voltage into the corresponding AC current using a current supply amplifier (AE Techron 7548); by driving the Helmholtz coils with the AC current to generate
B with a constant
= 0.125 mT in the transverse (
x-) direction; and by measuring
and
using the lock-in amplifier. The AC current for generating
B was monitored and assured using a current probe (HIOKI 9273) and a signal conditioner (HIOKI 3271) connected to the current feedback input of the lock-in amplifier. The
spectrum was calculated by sweeping the solver frequency in COMSOL Multiphysics
® from 1 Hz to 170 kHz in steps of 100 Hz. It is seen from
Figure 3 that the
and
spectra agree well with each other, and their difference (
) fluctuates very slightly (<3%) about zero in the frequency range of 1 Hz–170 kHz. This small difference confirms our design in
Section 2 and
Section 3, and supports the condition of
as stated in Equation (22) in the ME composites of our gradient sensor. Both
and
exhibit a large resonance peak of ~974 V/T at the resonance frequency (
) of 120 kHz, corresponding to a half longitudinal wavelength of 12 mm in the ME composites. Non-resonance
and
as large as 231 V/T are achieved from 1 Hz to 80 kHz. Comparing the measured
and
spectra with the calculated
spectrum, the broader resonance width in both
and
can be explained by the presence of magneto-mechano-electrical losses in the ME composites, while the slight decrease in both
and
from 1 Hz to 80 kHz can be regarded as the existence of eddy-current loss in the conductive Terfenol-D plates.
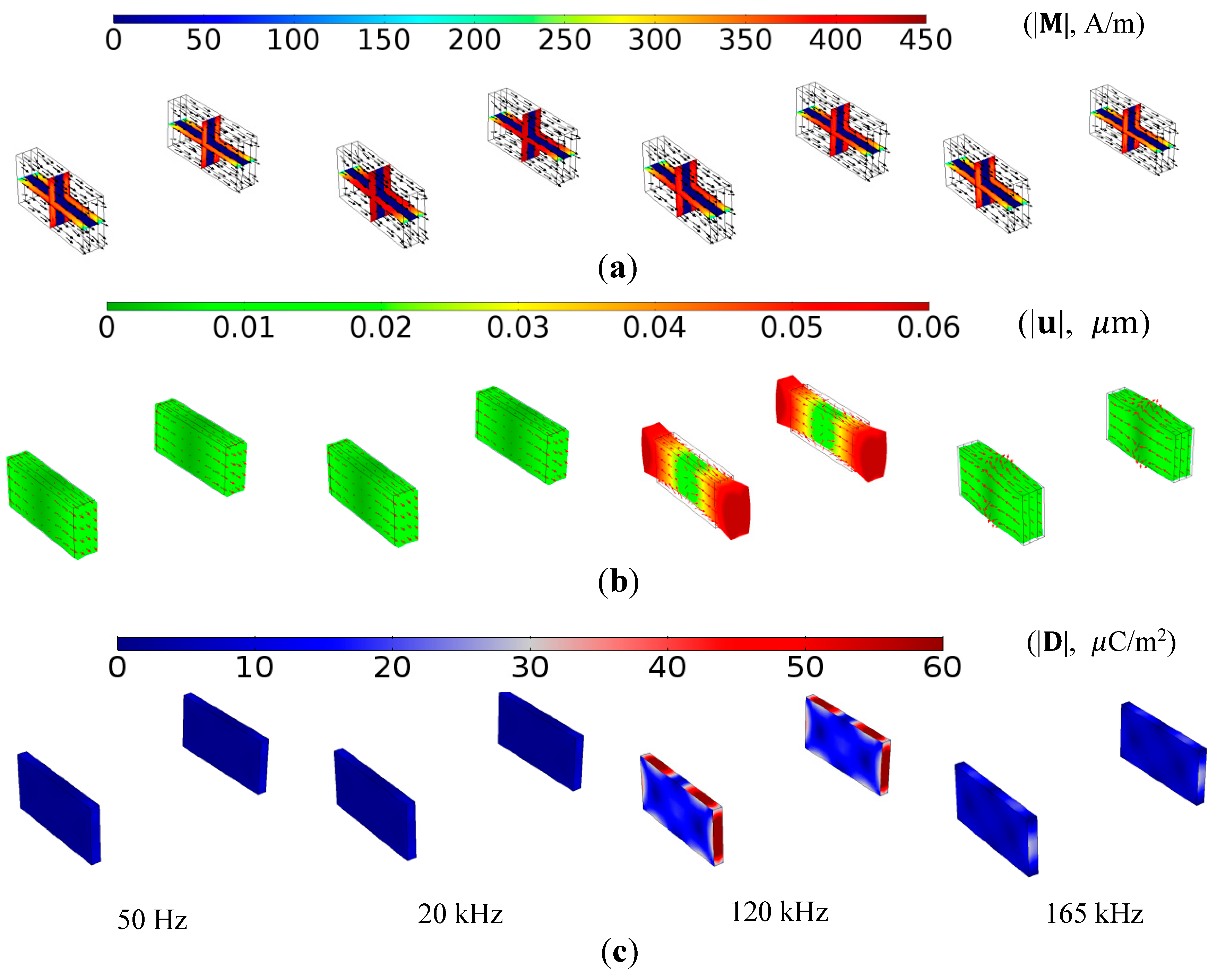
Figure 4 shows the FEA results of the AC magnetization (|
|),
-scaled total dynamic mechanical displacement (
or
), and electric displacement field (|
|) of the two ME composites under a uniform
at four different
f of 50 Hz, 20 kHz, 120 kHz, and 165 kHz. The |
| illustrations in
Figure 4a reveal an even and high volume average of |
| in the Terfenol-D plates at lower frequency excitations of 50 Hz and 20 kHz. By contrast, a small volume average of |
| in the Terfenol-D plates and a large |
| on the surfaces of the Terfenol-D plates are seen at higher frequency excitations of 120 and 165 kHz because of the eddy-current-induced demagnetization. The observations are verified by further investigation into the volume average of |
| in the Terfenol-D plates, giving 386.16, 385.40, 363.20, and 349.58 A/m at the corresponding
f. The decrease in volume average of |
| with increasing
f provides an insight into the slight decrease in both
and
from 1 Hz to 80 kHz in
Figure 3, and it can be ascribed to the weakening of the magnetomechanical coupling in the Terfenol-D plates as a result of the eddy-current-induced demagnetization as expressed in Equation (6). The
or
illustrations in
Figure 4b indicate the domination of the in-phase longitudinal deformation in the two ME composites with a uniform
for
f up to
= 120 kHz. The deformation is maximized at 120 kHz and turns into out-of-phase with
for
f above 120 kHz. The |
| illustrations in
Figure 4c suggest that |
| in the two ME composites reaches the maximum value at 120 kHz. This agrees with the maximization of deformation at 120 kHz in
Figure 4b because of the resonance ME effect [
16].
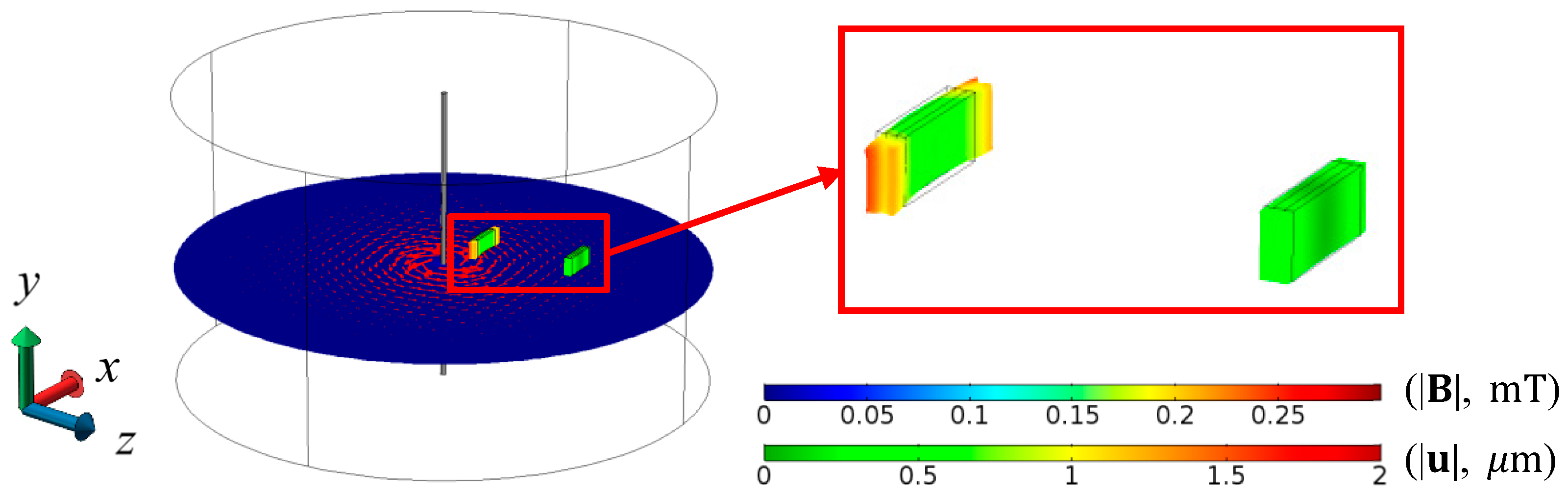
4.2. Calibration of Detection Sensitivity
Figure 5 shows the FEA results of the magnetic field (
) distribution and total dynamic mechanical displacement (
or
) of the two ME composites in accordance with the configuration and calibration of the gradient sensor in
Figure 1a. An AC current of 1 A RMS amplitude and 1 kHz frequency was injected into the straight cable of 2 m length to produce
. The two ME composites exhibit different levels of
-induced deformations along their lengths in the transverse (
x-) direction due to the relative separation by the 35 mm baseline. This also reflects the case of using the gradient sensor in detecting transverse MFGs associated with current-carrying cables. The inset of
Figure 5 reveals that the two ME composites are dominant by longitudinal modes with minor contribution of bending modes.
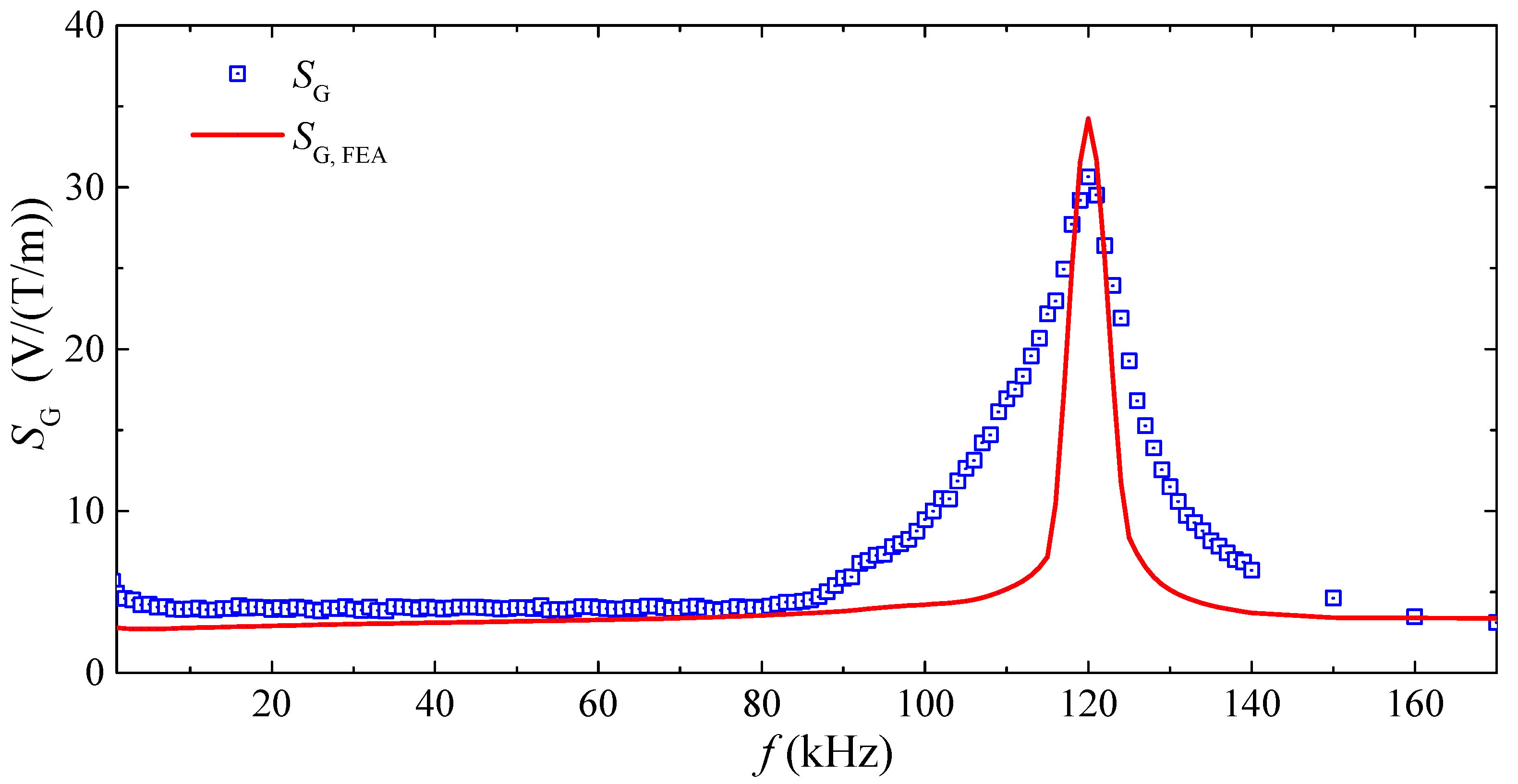
Figure 6 plots the frequency (
f) dependence of the measured and calculated detection sensitivities (
and
) of the gradient sensor. The
spectrum was measured by fixing the gradient sensor in the
x–z plane as in
Figure 1 and
Figure 5; by producing an AC reference voltage of constant amplitude over the prescribed
f range of 1 Hz–170 kHz using a lock-in amplifier (SRS SR865); by converting and amplifying the AC reference voltage into the corresponding AC current using a current supply amplifier (AE Techron 7548); by driving the 2 m straight cable with the AC current of 0–12 A in steps of 0.5 A to generate a transverse MFG (
) of 0–3.2 mT/m; and by measuring
using the lock-in amplifier. The distance (
R) from the center of the straight cable to the first ME composite was set at 15 mm, while the baseline (
L) was 35 mm. The AC current for generating
was monitored and assured using a current probe (HIOKI 9273) and a signal conditioner (HIOKI 3271) connected to the current feedback input of the lock-in amplifier. The
spectrum was calculated by sweeping the solver frequency in COMSOL Multiphysics
® from 1 Hz to 170 kHz in steps of 100 Hz. The
and
spectra are quantitatively similar to the
(or
) and
spectra in
Figure 3, suggesting the determination of
by
and
, as prescribed by Equation (20). Large non-resonance
of 7.53 V/T/m is achieved over a broad frequency range of 1 Hz–80 kHz, while high resonance
of 30.6 V/(T/m) is obtained at
of 120 kHz.
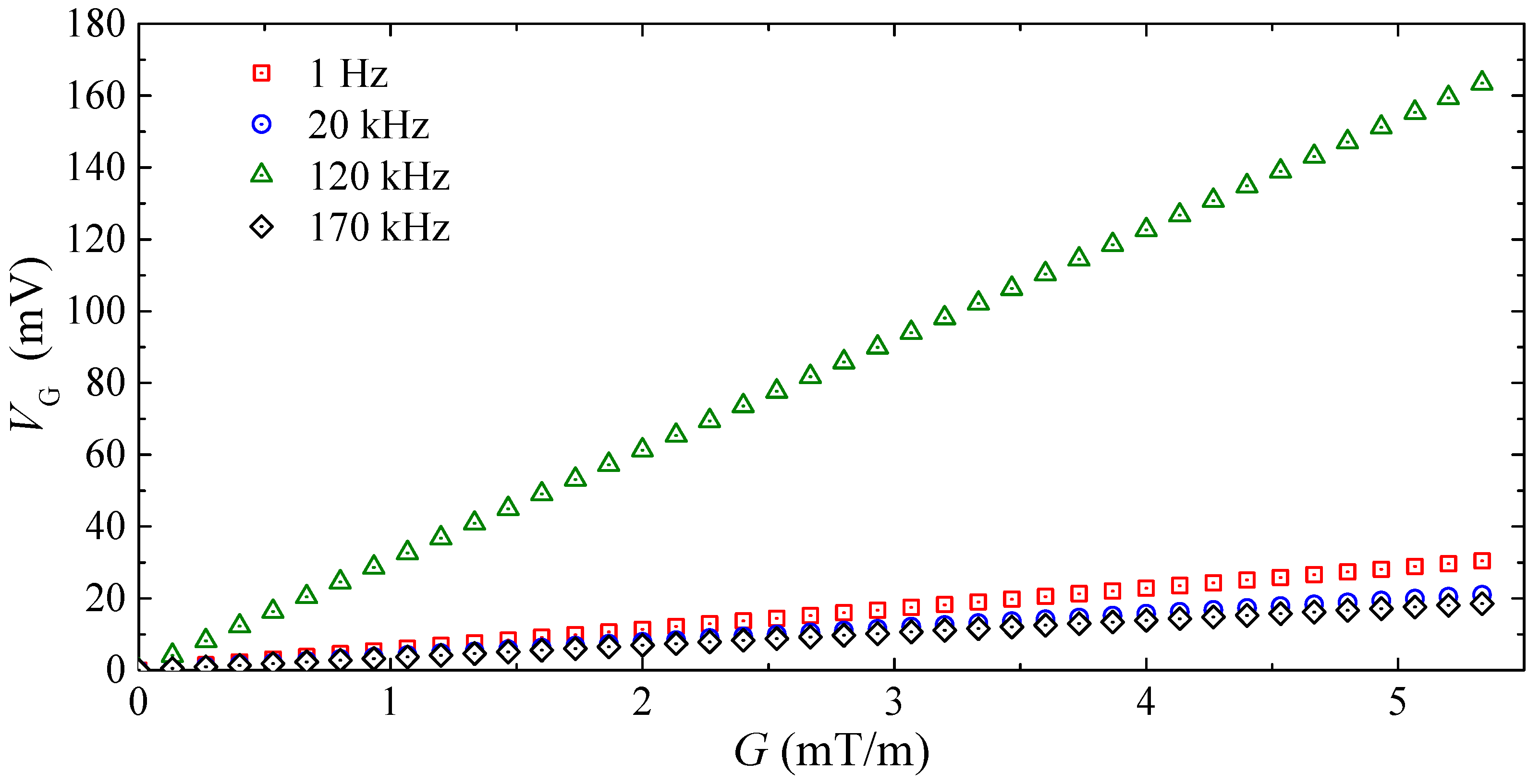
Figure 7 gives the measured gradient sensor output voltage (
) as a function of transverse MFG (
) at four different frequencies of 1 Hz, 20 kHz, 120 kHz, and 170 kHz performed in the same measurement process of
Figure 6. Among the four
–
curves, the one with the largest slope is obtained at 120 kHz, which is in good agreement with the measured
spectrum in
Figure 6. An analysis of the input-output nonlinearity for the
–
responses over the
f range of measurement finds a very small nonlinearity value of <10 ppm. This nonlinearity value is comparable to that of the fluxgate gradient sensors for space applications [
32].
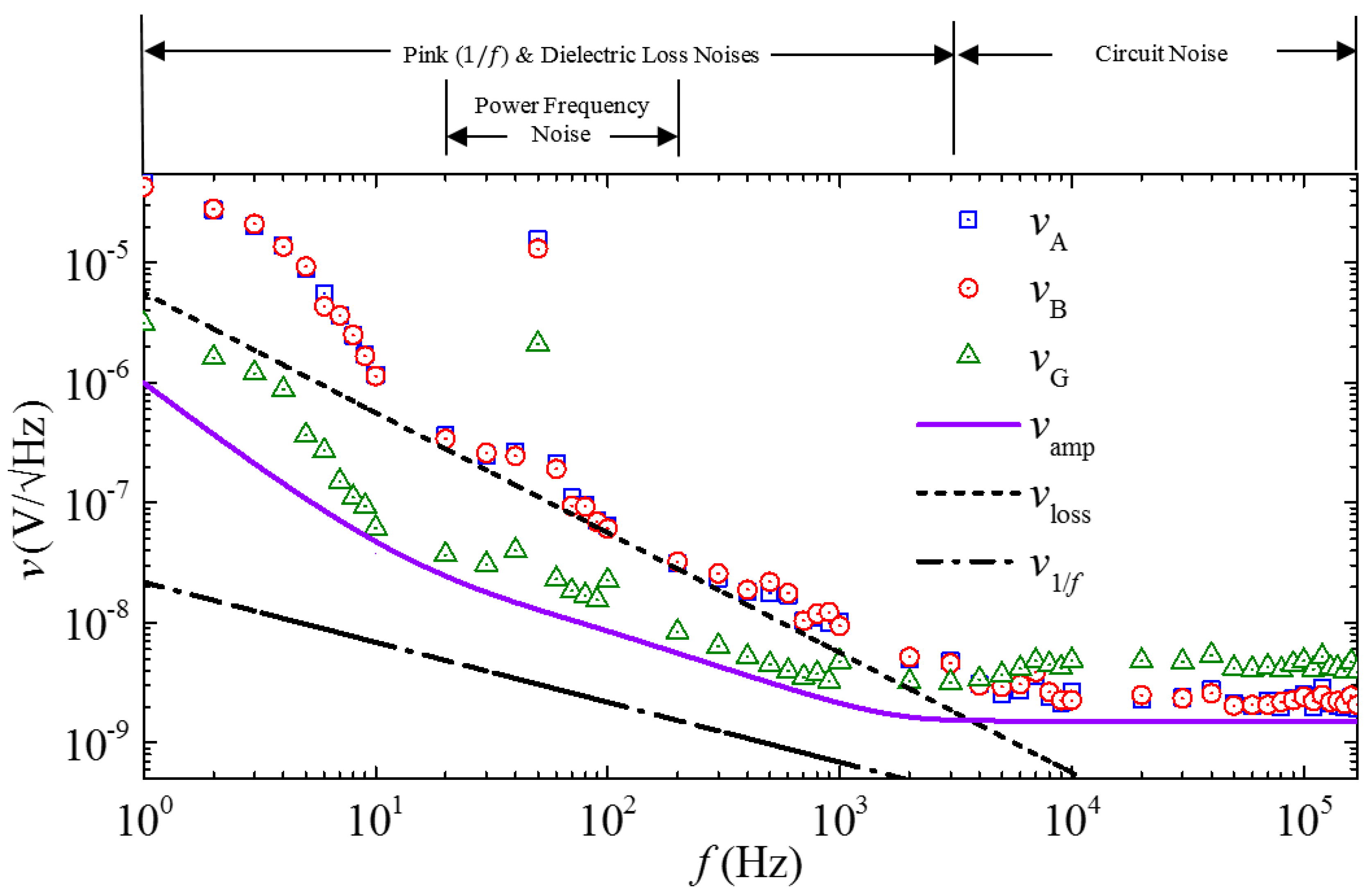
4.3. Evaluation of Voltage Noise Density Spectra and Gradient Noise Spectra
Figure 8 shows the measured voltage noise density spectra of the two ME composites (
and
), the gradient sensor (
), and the lock-in amplifier noise floor (
), together with the calculated pink noise density (
) and dielectric loss noise density (
) spectra. The
,
, and
spectra were independently measured from the output of the two ME composites and that of the gradient sensor, respectively, in a magnetically unshielded laboratory environment at 20 °C using a lock–in amplifier (SRS SR865) in the range of 1 Hz–170 kHz with a bandwidth (
) of 2.6 Hz [
31]. The
was measured by short-circuiting the input BNC terminal of the lock–in amplifier using the same instrument configuration described above. The
and
spectra were calculated using Equations (24) and (25) with the parameters listed in
Table 3. Since the effect of the ambient electric field noise is minimized by the copper shield, the
,
, and
spectra in
Figure 8, in confirmation with the calculated
and
spectra, are dominated by the pink (
) noise and the dielectric loss noise from 1 Hz to 3 kHz. In the 20–150 Hz range, the power-frequency noise arising from the magnetically-unshielded laboratory environment has an obviously added effect on the background of the pink noise and the dielectric loss noise. In the further elevated frequency range of 3–170 kHz, the circuit noise associated with measurements is active since
,
, and
all fluctuate over constant values. Nonetheless, the
spectrum, in comparison with the
and
, suggests that the MFG technique is a powerful technique to suppress various types of ambient noise, including pink noise, dielectric loss noise, and power-frequency noise, for
up to 3 kHz. Beyond 3 kHz,
becomes double that of
and
. This can be explained by the phase-lag between the voltage noises (
and
) in the two ME composites at high
f because the voltage noises have random phases at high
f (i.e.,
> 3 kHz).
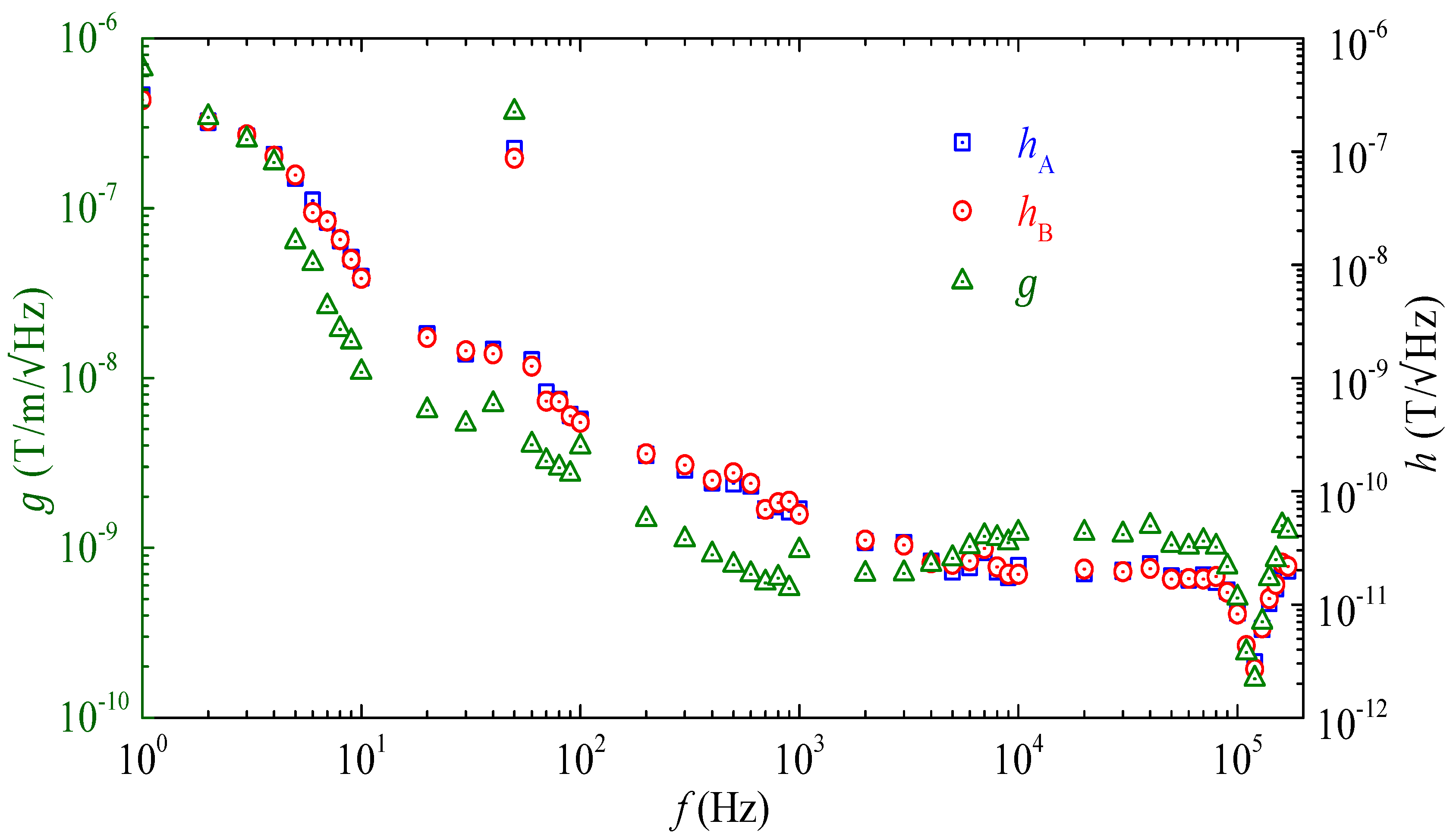
Figure 9 shows the field noise (
and
) spectra of the two ME composites and the gradient noise (
) spectrum of the gradient sensor. The
,
, and
spectra were evaluated using the measured
,
, and
spectra in
Figure 8 as well as Equations (26) and (27). It is found that the ME composites have
and
of 0.003–320 nT/
and the gradient sensor has
of 0.16–620 nT/m/
, both in the frequency range of 1 Hz–170 kHz in a magnetically-unshielded laboratory environment at 20 °C. The results suggest that the gradient sensor can be used for transverse magnetic field detection with a field noise of 0.003–320 nT/
as well as for transverse MFG detection with a gradient noise of 0.16–620 nT/m/
. The performance of
,
, and
can be further increased by using ME composites with a higher ME voltage coefficient (
and
).
4.4. Evaluation of Spatial Transfer Function
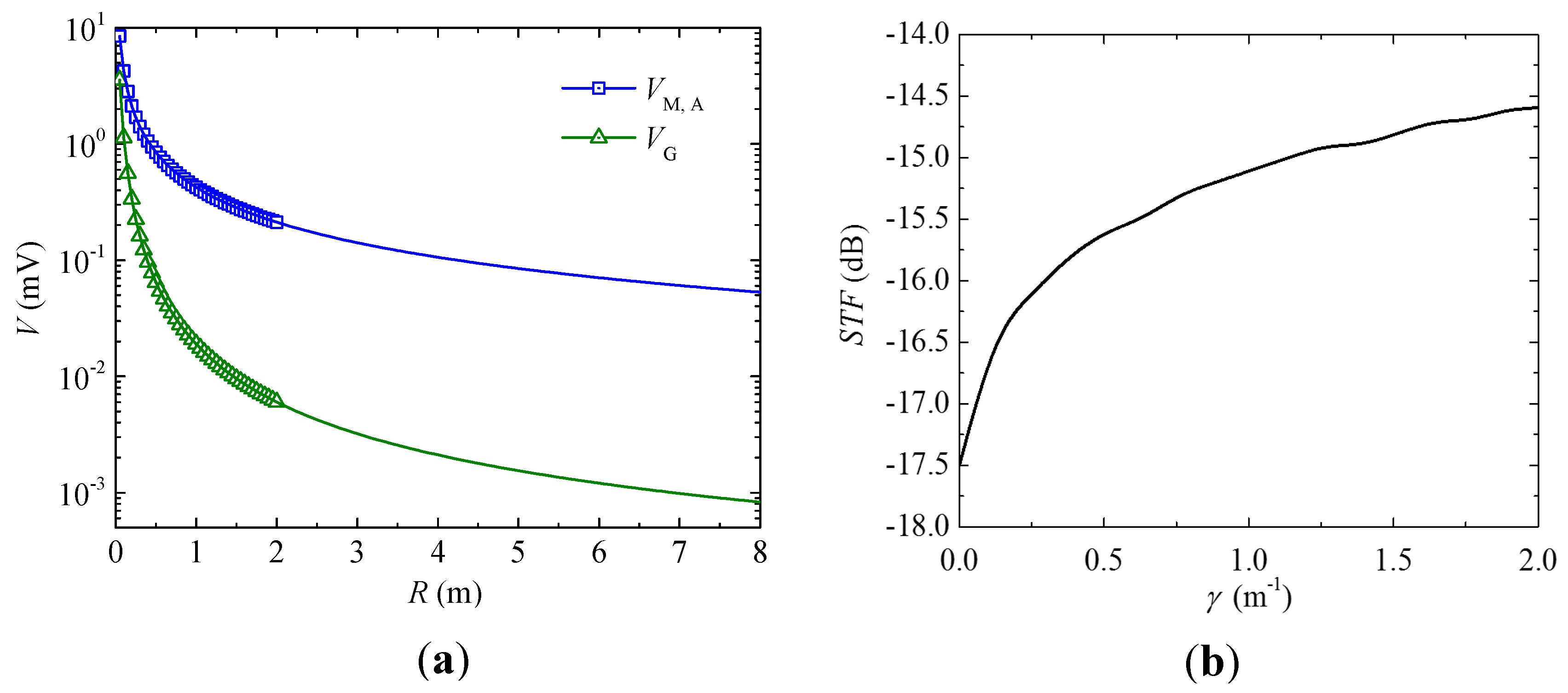
Figure 10a shows the measured
and
as a function of
R in response to the artificially generated common-mode magnetic field noise by the straight cable as in
Figure 1a.
Figure 10b plots the spatial transfer function (
STF) of the gradient sensor as a function of spatial frequency (
). The
and
in
Figure 10a were measured by holding a straight cable with a length of 8 m along the
y-direction as in
Figure 1a, by passing an AC current of 12 A RMS amplitude and 50 Hz frequency through the straight cable, and by fixing the gradient sensor in the
x–z plane to enable its movement along the axial (
z-) direction with adjustable distance (
R) from the center of the straight cable to the first ME composite. The measured output voltage of the first ME composite (
) and that of the gradient senor (
) were independently measured using the lock-in amplifier at various
R of 0.05–2 m in steps of 0.05 m. The
STF in
Figure 10b was then obtained by dividing the Fourier transform of the spline-interpolated
curve over that of the spline-interpolated
curve, analogous to the traditional method used for evaluating the
STF of existing axial gradient sensors [
33,
34]. The
STF in
Figure 10b indicates that our gradient sensor is essentially a high-pass spatial filter with a minimal
STF value of –17.5 dB when
(i.e.,
R ) and an increased
STF value of <–14.5 dB when
is within the range of 0–2 m
−1 (i.e.,
R0.5 m). This means that our gradient sensor has a common-mode magnetic field noise rejection rate better than –14.5 dB (for
R 0.5 m) under the interference of remote common-mode magnetic field noise sources.
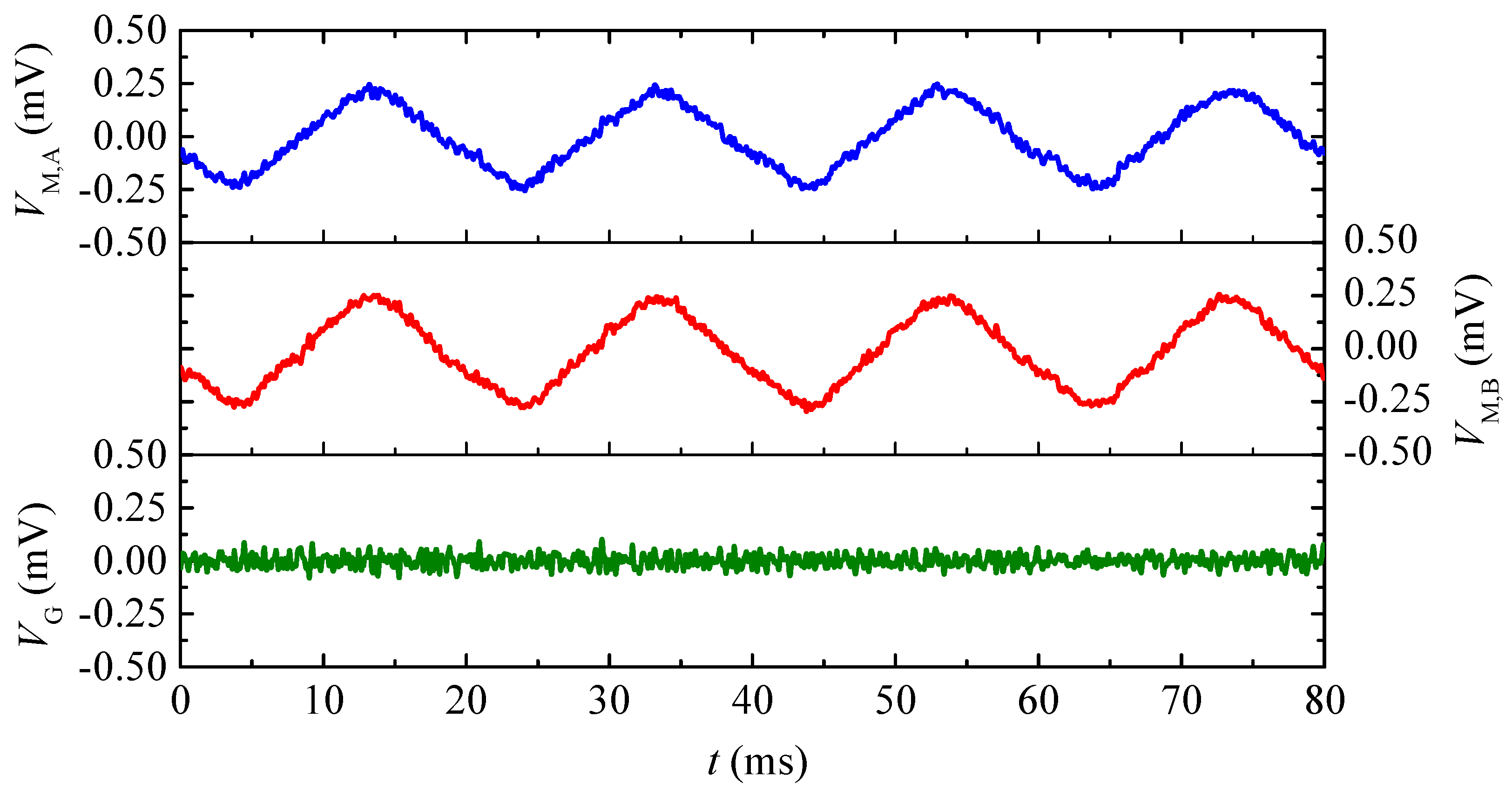
Figure 11 shows the ME voltage waveforms of the two ME composites (
and
) and the output voltage waveform of the gradient sensor (
) when
R = 1.8 m. The waveforms of
,
, and
were recorded using a mixed signal oscilloscope (Tektronix MSO2014) with a 60 kHz low-pass filter. This is to demonstrate the common-mode ambient noise suppression performance of the gradient sensor. It is seen that the common-mode voltage noises, which are induced by the common-mode magnetic field noise and picked up by the two ME composites, are suppressed by 36 times in the gradient sensor.
5. Conclusions
We have developed a small-scale and standalone ME transverse gradient sensor for a passive and direct detection of MFGs transverse to its length into electrical voltages while simultaneously suppressing common-mode ambient noise by combining the key advantages of the ME effect and the MFG technique in a pair of magnetically-biased, electrically-shielded, and mechanically-enclosed Terfenol-D/PZT/Terfenol-D trilayer ME composites having a transverse orientation and an axial baseline. The design and modeling processes of the gradient sensor have been established. A characteristic design of the gradient sensor has been reported, both theoretically and experimentally, to simultaneously demonstrate a high detection sensitivity of 0.4–30.6 V/(T/m), a strong common-mode magnetic field noise rejection rate of <–14.5 dB, a small input-output nonlinearity of <10 ppm, and a low gradient noise of 0.16–620 nT/m/ over a broad frequency range of 1 Hz–170 kHz under a small baseline of 35 mm in a magnetically-unshielded laboratory environment. The gradient sensor is especially useful to suppress pink (1/f) noise, dielectric loss noise, and power-frequency noise below 3 kHz. The high detection performance, in conjunction with the passive, direct, and broadband MFG detection ability in a small-scale and standalone package, makes the gradient sensor a promising transverse MFG detection device in contrast to traditional fluxgate, Hall, and SQUID gradient sensors.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}