Spatial-Temporal Data Collection with Compressive Sensing in Mobile Sensor Networks

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
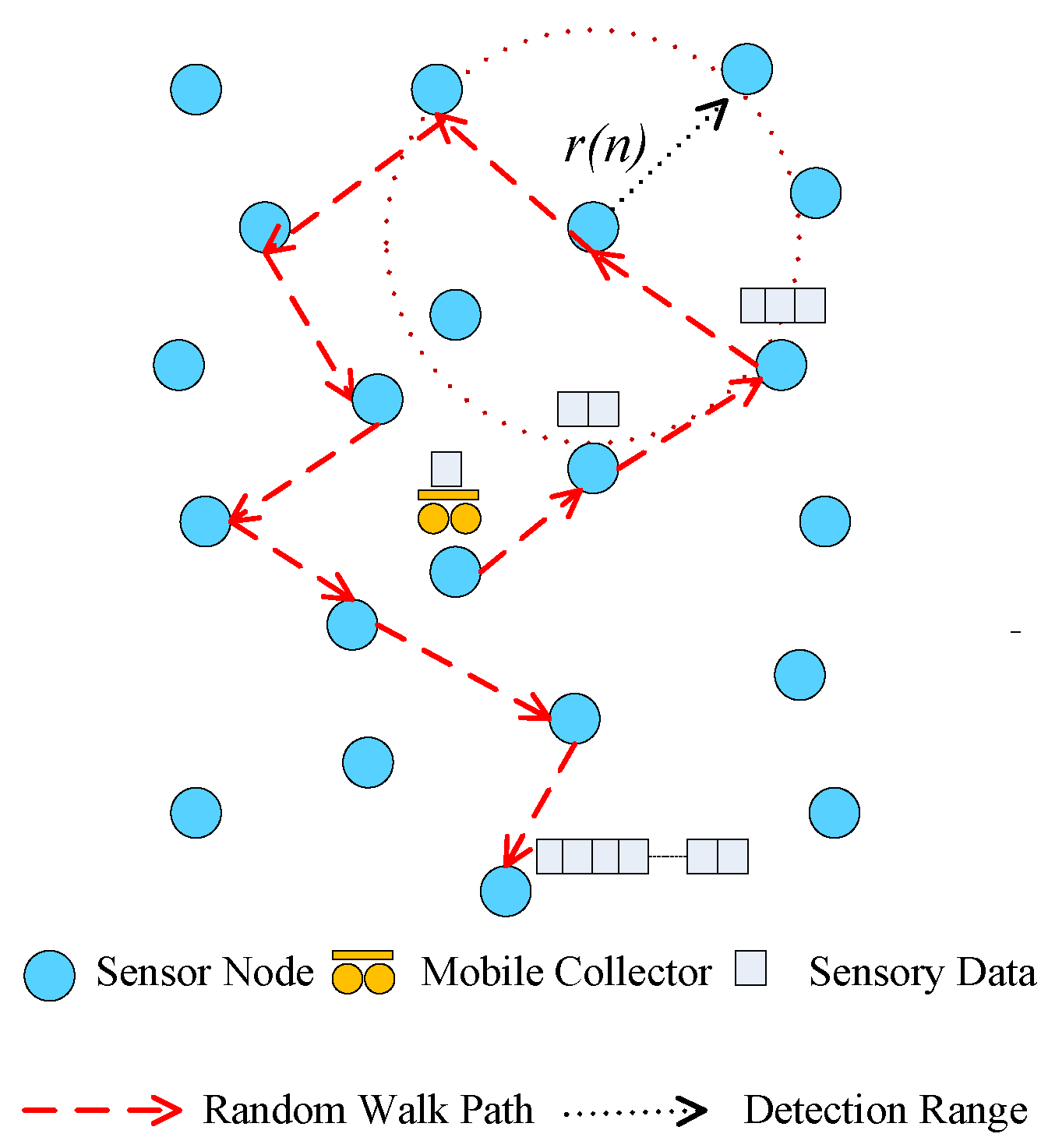
- We propose a data gathering scheme using the Metropolis-Hastings algorithm with delayed acceptance (MHDA), a random walk algorithm for a mobile collector to collect data from sensor nodes. In this scheme, the mobile collector only needs to collect temporal CS measurements from a subset of nodes by sequentially visiting these nodes along a random routing path. Unlike [26,27] which need to perform multiple random walks to obtain random projections, the mobile collector takes only one random walk to collect measurements from nodes, which can significantly reduce the cost of data transmissions and improve energy efficiency. On the other hand, instead of using a standard random walk as [41], we adopt an improved Metropolis-Hastings algorithm as a mobility pattern which results in more uniform sampling distribution to improve signal reconstruction accuracy.
- We prove that the sensing matrix for spatial dimensional signal which is constructed from the proposed random walk algorithm and a kernel-based sparsity representation basis satisfies the Restricted Isometry Property (RIP). We also exploit KCS for spatial-temporal correlation of sensory data to improve the compression performance and prove that the equivalent sensing matrix for spatial-temporal dimensional signal can satisfy the property of KCS models.
- We also show that the proposed scheme is robust to the packet loss environment. We present simulation results to demonstrate that the proposed scheme is able to not only reduce communication cost but also improve recovery accuracy for mobile data gathering compared to some existing schemes.
2. Related Work
3. Preliminaries and Problem Formulation
3.1. Compressive Sensing Basics
3.2. System Model
3.3. Problem Formulation
4. Design of a Mobile Data Gathering Scheme with Compressive Sensing
4.1. Spatial-Temporal Data Gathering with Random Walk
| Algorithm 1 The MHDA random walk algorithm for mobile data gathering at time t. |
|
4.2. Random Measurement Matrices Design
4.3. Spatial-Temporal Sparsity Representation Bases Design
4.4. Reconstruction Algorithm of Spatial-Temporal Data
5. Algorithm and Performance Analysis
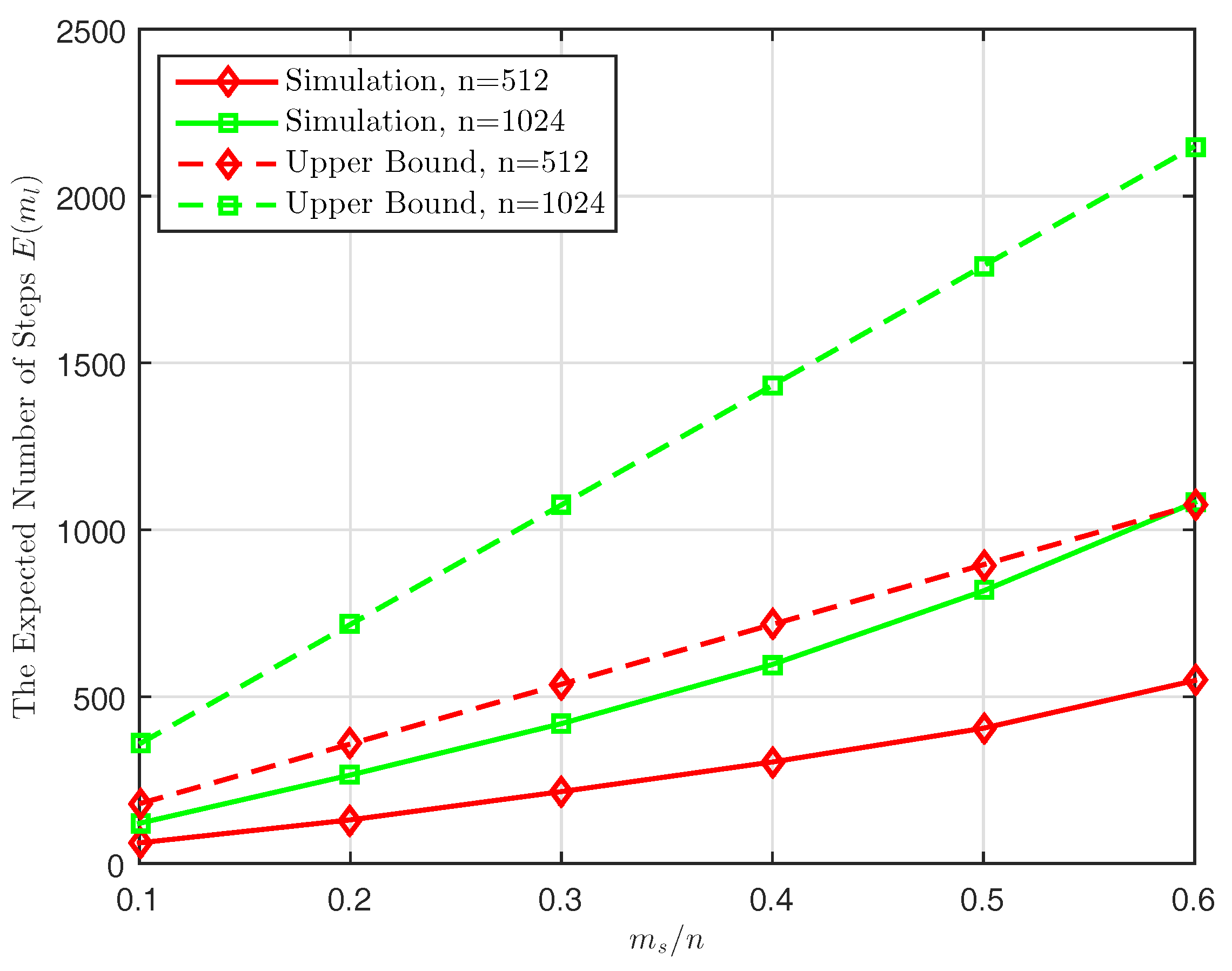
5.1. Algorithm Analysis
5.2. Performance Analysis
5.3. Discussion
6. Numerical Simulations
6.1. Spatial and Temporal Correlation Characteristics of the Dataset
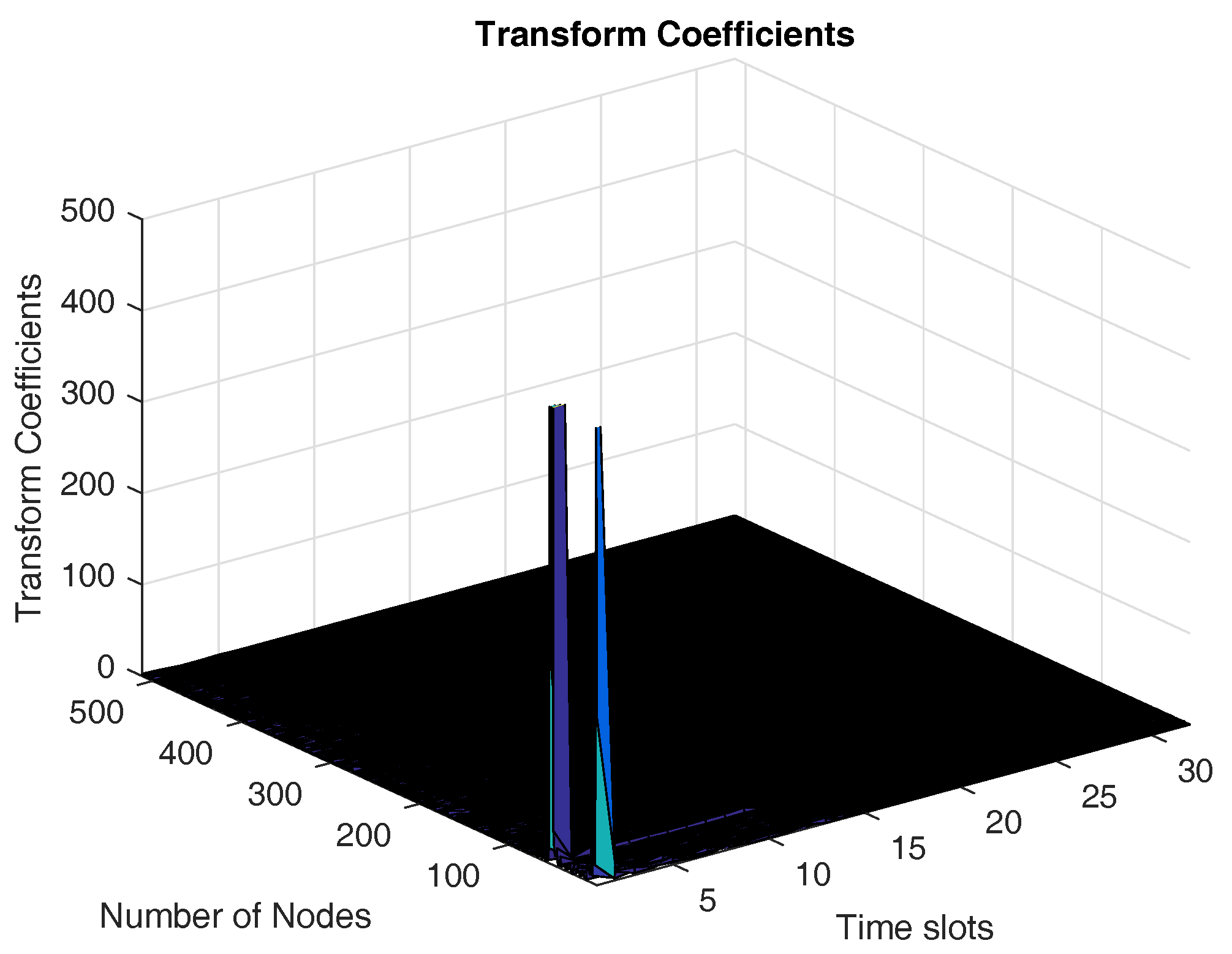
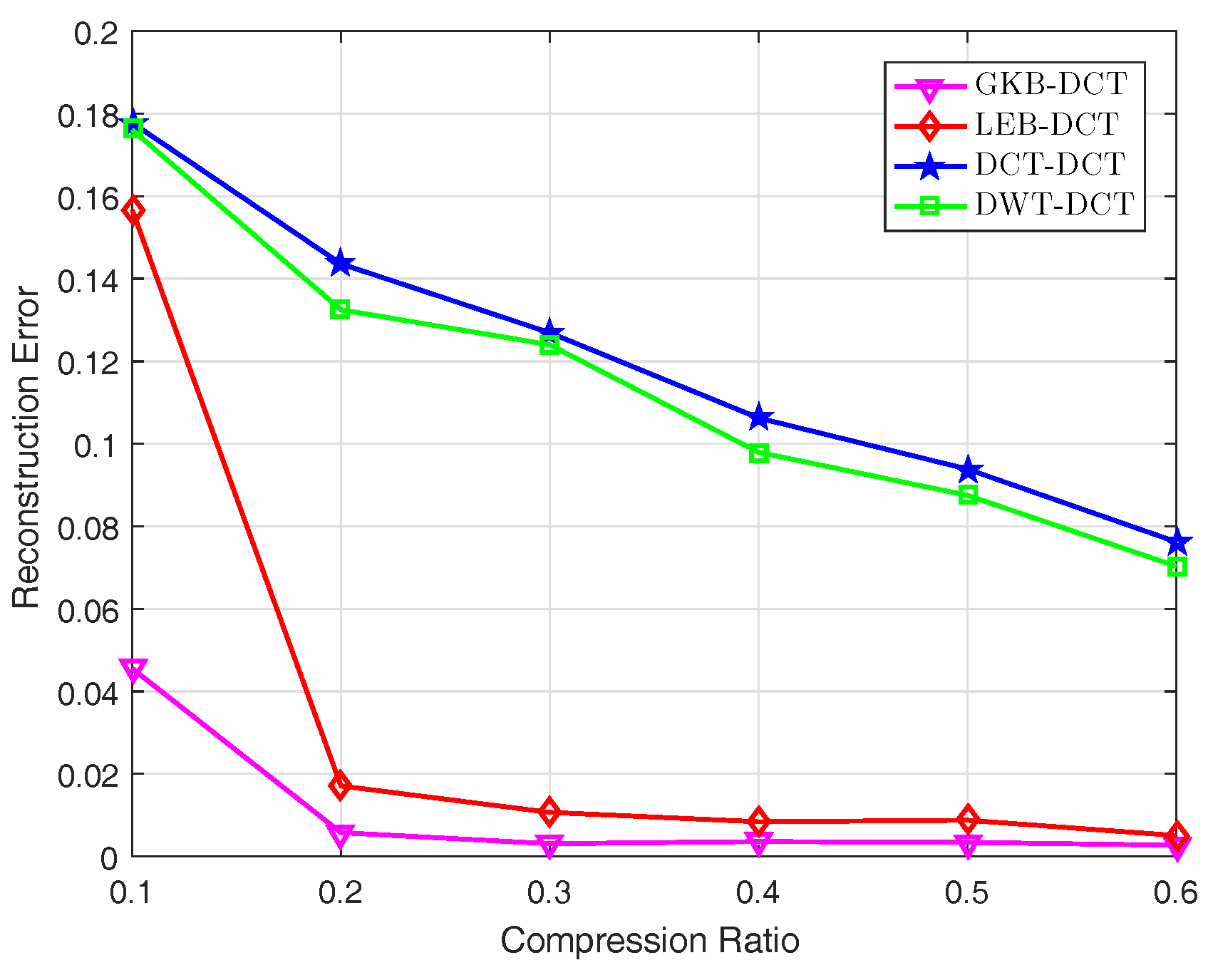
6.2. Performance of Spatial-Temporal Sparsity Representation Basis
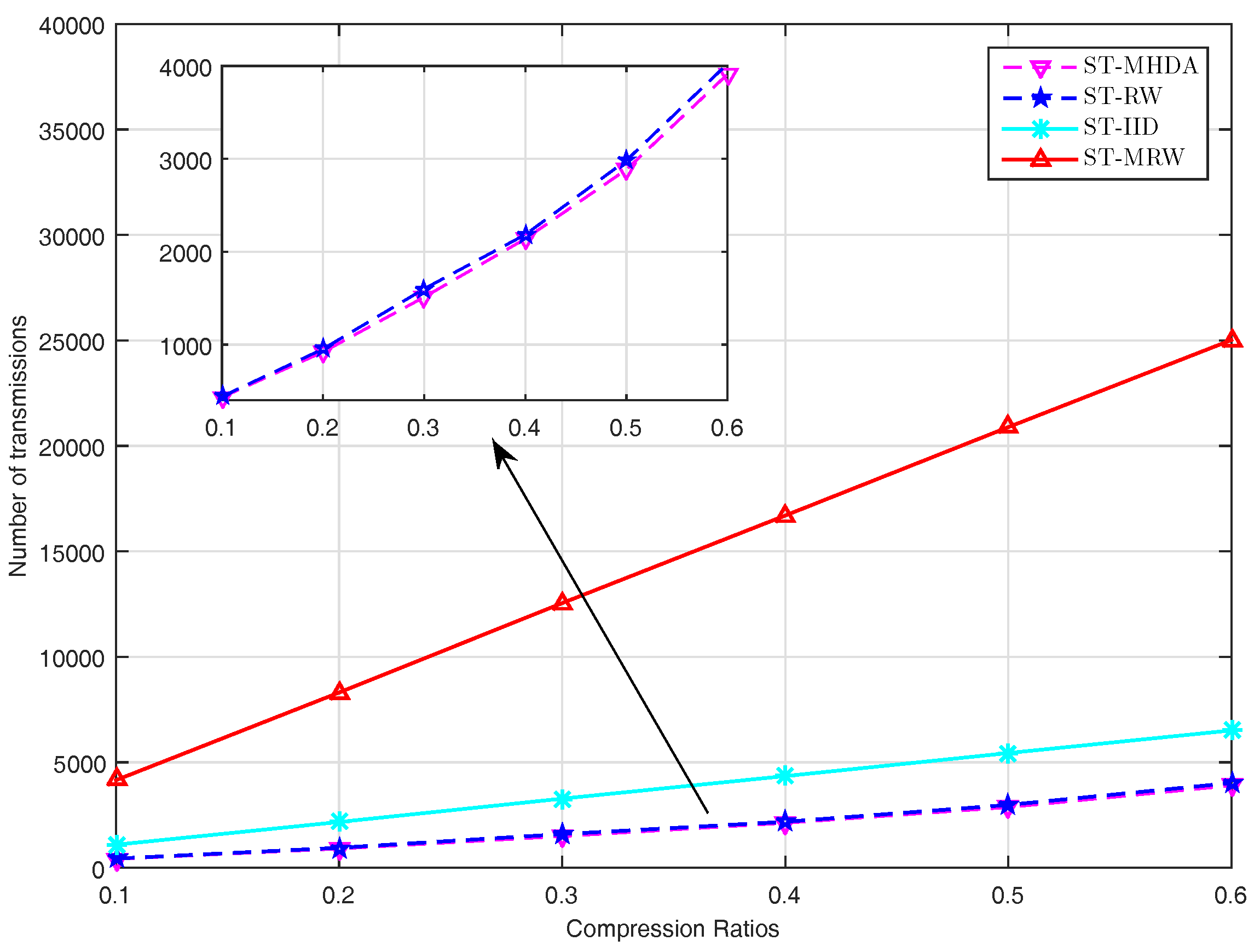
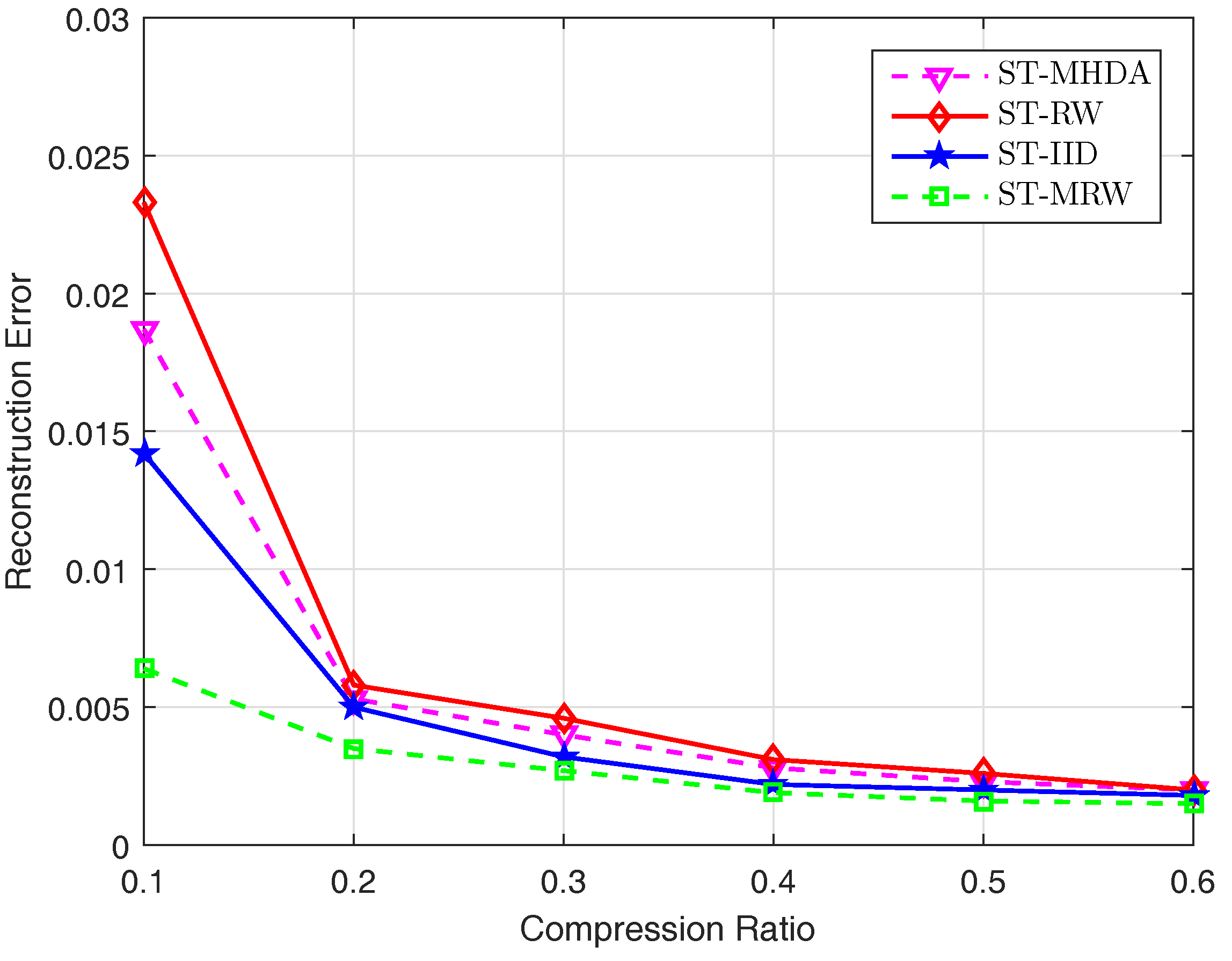
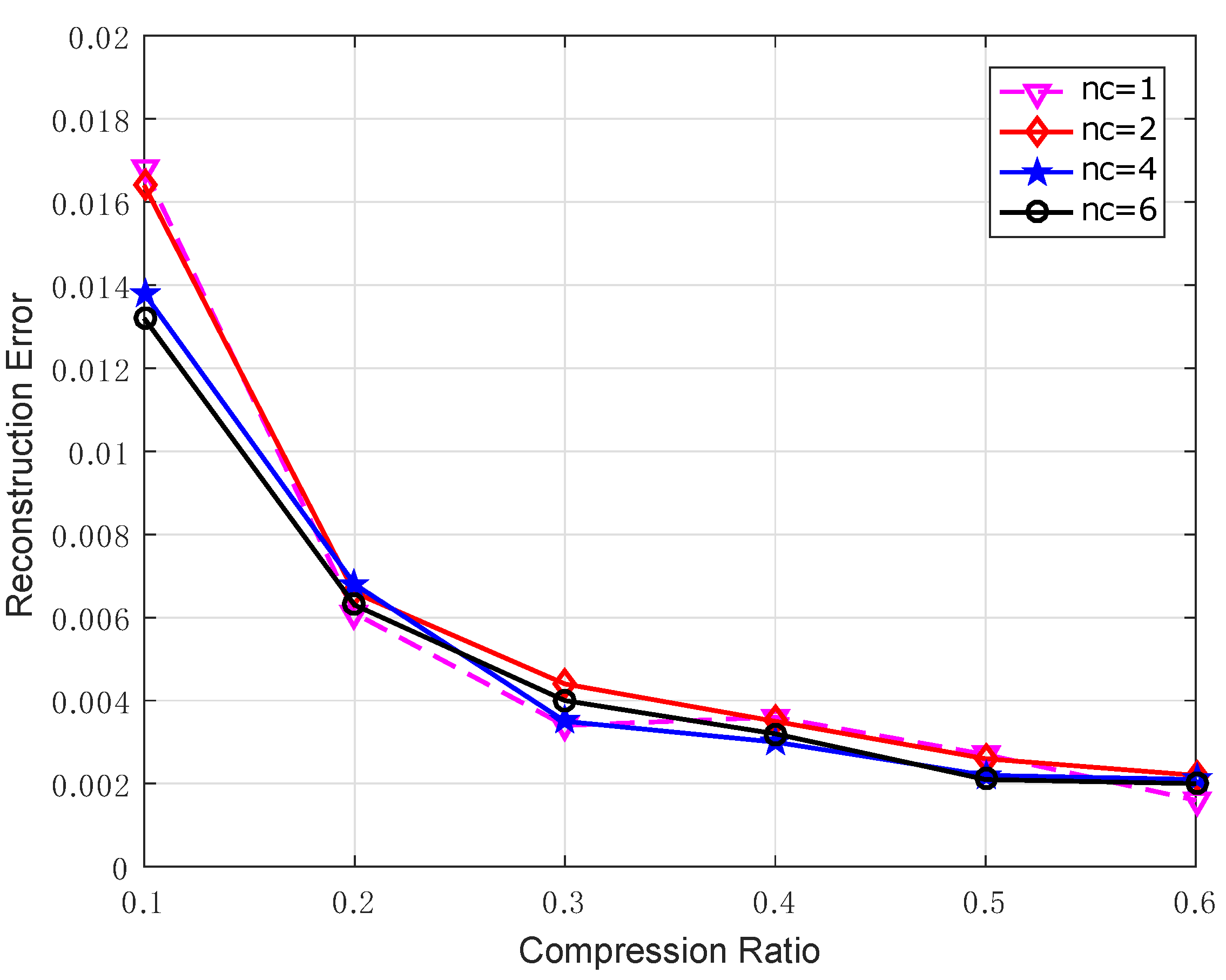
6.3. Performance of Spatial-Temporal Data Gathering with Mobile Collector
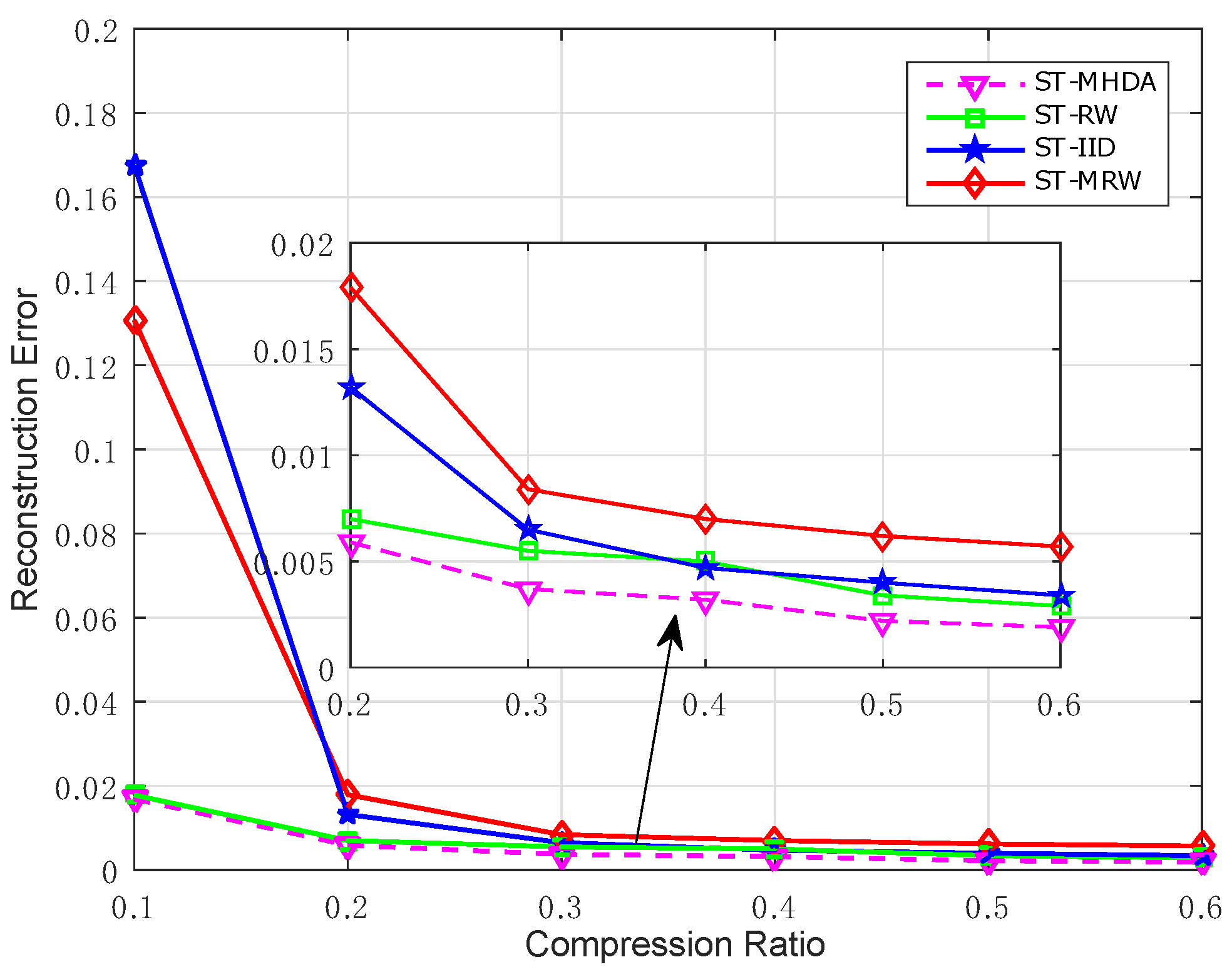
6.4. Performance of the Proposed Scheme with Packet Loss
7. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, M.; Tan, L.; Xiong, N. Data prediction, compression, and recovery in clustered wireless sensor networks for environmental monitoring applications. Inf. Sci. 2016, 329, 800–818. [Google Scholar] [CrossRef]
- Huang, K.; Zhang, Q.; Zhou, C.; Xiong, N.; Qin, Y. An efficient intrusion detection spproach for visual sensor networks based on traffic pattern learning. IEEE Trans. Syst. Man Cybern. Syst. 2017, 1, 1–10. [Google Scholar]
- Xiong, N.; Vasilakos, A.V.; Yang, L.T.; Song, L.; Pan, Y.; Kannan, R.; Li, Y. Comparative analysis of quality of service and memory usage for adaptive failure detectors in healthcare systems. IEEE J. Sel. Areas Commun. 2009, 27, 495–509. [Google Scholar] [CrossRef]
- Wu, P.; Xiao, F.; Sha, C.; Huang, H.; Wang, R.; Xiong, N. Node scheduling strategies for achieving full-view area coverage in camera sensor networks. Sensors 2017, 17, 1303. [Google Scholar] [CrossRef] [PubMed]
- Yuen, K.; Liang, B.; Li, B. A distributed framework for correlated data gathering in sensor networks. IEEE Trans. Veh. Technol. 2008, 57, 578–593. [Google Scholar] [CrossRef]
- Hua, G.; Chen, C.W. Correlated data gathering in wireless sensor networks based on distributed source coding. Int. J. Sens. Netw. 2008, 4, 13–22. [Google Scholar] [CrossRef]
- Shen, G.; Ortega, A. Optimized distributed 2d transforms for irregularly sampled sensor network grids using wavelet lifting. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Las Vegas, NV, USA, 30 March–4 April 2008; pp. 2513–2516. [Google Scholar]
- Xu, X.; Li, X.-Y.; Wan, P.-J.; Tang, S. Efficient scheduling for periodic aggregation queries in multihop sensor networks. IEEE/ACM Trans. Netw. 2012, 20, 690–698. [Google Scholar] [CrossRef]
- Donoho, D. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Luo, C.; Wu, F.; Sun, J.; Chen, C.W. Compressive data gathering for large-scale wireless sensor networks. In Proceedings of the 15th Annual International Conference on Mobile Computing and Networking (ACM Mobicom), Beijing, China, 26–28 September 2009; pp. 145–156. [Google Scholar]
- Luo, C.; Wu, F.; Sun, J.; Chen, C.W. Efficient measurement generation and pervasive sparsity for compressive data gathering. IEEE Trans. Wirel. Commun. 2010, 9, 3728–3738. [Google Scholar] [CrossRef]
- Xiang, L.; Luo, J.; Rosenberg, C. Compressed data aggregation: Energy-efficient and high-fidelity data collection. IEEE/ACM Trans. Netw. 2013, 21, 1722–1735. [Google Scholar] [CrossRef]
- Zheng, H.; Xiao, S.; Wang, X.; Tian, X. Energy and latency analysis for in-network computation with compressive sensing in wireless sensor networks. In Proceedings of the IEEE INFOCOM (Mini-Conference), Orlando, FL, USA, 25–30 March 2012; pp. 2811–2815. [Google Scholar]
- Zheng, H.; Xiao, S.; Wang, X.; Tian, X.; Guizani, M. Capacity and delay analysis for data gathering with compressive sensing in wireless sensor networks. IEEE Trans. Wirel. Commun. 2013, 12, 917–927. [Google Scholar] [CrossRef]
- Xie, R.; Jia, X. Transmission efficient clustering method for wireless sensor networks using compressive sensing. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 806–815. [Google Scholar]
- Zhao, C.; Zhang, W.; Yang, Y.; Yao, S. Treelet-based clustered compressive data aggregation for wireless sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 4257–4267. [Google Scholar] [CrossRef]
- Nguyen, M.; Teague, K.A.; Rahnavard, N. Inter-cluster multi-hop routing in wireless sensor networks employing compressive sensing. In Proceedings of the Military Communications Conference (MILCOM), Baltimore, MD, USA, 6–8 October 2014; pp. 1133–1138. [Google Scholar]
- Quer, G.; Masiero, R.; Munaretto, D.; Rossi, M.; Widmer, J.; Zorzi, M. On the interplay between routing and signal representation for compressive sensing in wireless sensor networks. In Proceedings of the Information Theory and Applications Workshop (ITA), La Jolla, CA, USA, 8–13 February 2009; pp. 206–215. [Google Scholar]
- Lee, S.; Pattem, S.; Sathiamoorthy, M.; Krishnamachari, B.; Ortega, A. Spatially-localized compressed sensing and routing in multi-hop sensor networks. In Proceedings of the Third International Conference on Geosensor Networks, Oxford, UK, 13–14 July 2009; pp. 11–20. [Google Scholar]
- Sartipi, M.; Fletcher, R. Energy-efficient data acquisition in wireless sensor networks using compressed sensing. In Proceedings of the IEEE Data Compression Conference (DCC), Snowbird, UT, USA, 29–31 March 2011; pp. 223–232. [Google Scholar]
- Zheng, H.; Yang, F.; Gan, X.; Tian, X.; Wang, X.; Xiao, S. Data gathering with compressive sensing in wireless sensor networks: A random walk based approach. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 35–44. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, Y.; Kong, L.; Liu, C.; Gu, Y.; Vasilakos, A.V.; Wu, M. CDC: Compressive data collection for wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 2188–2197. [Google Scholar] [CrossRef]
- Wu, X.; Xiong, Y.; Yang, P.; Wan, S.; Huang, W. Compressive sensing meets unreliable link: Sparsest random scheduling for compressive data gathering in lossy WSNs. In Proceedings of the 15th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Philadelphia, PA, USA, 11–14 August 2014; pp. 13–22. [Google Scholar]
- Zhang, H.; Zhu, Y.; Tan, J. Adaptive sampling and sensing approach with mobile sensor networks. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, Shenyang, China, 6–10 June 2015; pp. 654–660. [Google Scholar]
- Wang, Q.; Lv, C.; Shen, Y.; Chen, J. Compressed sensing and mobile agent based sparse data collection in wireless sensor networks. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Pisa, Italy, 11–14 May 2015; pp. 1789–1794. [Google Scholar]
- Nguyen, M.T.; Teague, K.A. Random walk based data collection in mobile sensor networks utilizing compressed sensing. Int. J. Complex Syst. Comput. Sens. Control 2015, 3, 107–117. [Google Scholar]
- Nguyen, M.T.; Teague, K.A. Random sampling in collaborative and distributed mobile sensor networks utilizing compressive sensing for scalar field mapping. In Proceedings of the 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 1–6. [Google Scholar]
- Mahmudimanesh, M.; Khelil, A.; Suri, N. Balanced spatio-temporal compressive sensing for multi-hop wireless sensor networks. In Proceedings of the IEEE 9th International Conference on Mobile Ad-Hoc and Sensor Systems, Las Vegas, NV, USA, 8–11 October 2012; pp. 389–397. [Google Scholar]
- Quer, G.; Masiero, R.; Pillonetto, G.; Rossi, M.; Zorzi, M. Sensing compression and recovery for WSNs: Sparse signal modeling and monitoring framework. IEEE Trans. Wirel. Commun. 2012, 11, 3447–3461. [Google Scholar] [CrossRef]
- Xu, X.; Ansari, R.; Khokhar, A. Spatio-temporal hierarchical data aggregation using compressive sensing (ST-HDACS). In Proceedings of the 2015 International Conference on Distributed Computing in Sensor Systems, Columbus, OH, USA, 29 June–2 July 2015. [Google Scholar]
- Wang, Y.; Yang, Z.; Zhang, J.; Li, F.; Wen, H.; Shen, Y. CS2-collector: A new approach for data collection in wireless sensor networks based on two-dimensional compressive sensing. Sensors 2016, 16, 1318. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Tao, X.; Chen, Z. Spatio-temporal compressive sensing based data gathering in wireless sensor networks. IEEE Wirel. Commun. Lett. 2017, PP, 1–4. [Google Scholar] [CrossRef]
- Wang, S.; Yi, H.; Wu, L.; Zhou, F.; Xiong, N. Mining probabilistic representative gathering patterns for mobile sensor data. J. Internet Technol. 2017, 19, 321–332. [Google Scholar]
- Cheng, H.; Su, Z.; Xiong, N.; Xiao, Y. Energy-efficient nodes scheduling algorithms for wireless sensor networks using Markov Random Field model. Inf. Sci. 2016, 329, 461–477. [Google Scholar] [CrossRef]
- Chang, C.; Chen, G.; Yu, G.; Wang, T.L.; Wang, T.C. TCWTP: Time-constrained weighted targets patrolling mechanism in wireless mobile sensor networks. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 901–914. [Google Scholar] [CrossRef]
- La, H.M.; Sheng, W.; Chen, J. Cooperative and active sensing in mobile sensor networks for scalar field mapping. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1–12. [Google Scholar] [CrossRef]
- Lee, C.; Kwak, J.; Kong, L.; Eun, D. Towards distributed optimal movement strategy for data gathering in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2016, 27, 574–584. [Google Scholar] [CrossRef]
- Fan, Q.; Zeitouni, K.; Xiong, N.; Wu, Q.; Camtepe, S.; Tian, Y. Nash equilibrium-based semantic cache in mobile sensor grid database systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, PP, 1–12. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Teague, K.A. Compressive wireless mobile sensing for data collection in sensor networks. In Proceedings of the IEEE International Conference on Advanced Technologies for Communications (ATC), Hanoi, Vietnam, 12–14 October 2016. [Google Scholar]
- Rana, R.; Yang, M.; Wark, T.; Chou, C.T.; Hu, W. Simpletrack: Adaptive trajectory compression with deterministic projection matrix for mobile sensor networks. IEEE Sens. J. 2015, 15, 365–373. [Google Scholar] [CrossRef]
- Zheng, H.; Guo, W.; Xiong, N. A Kernel-based compressive sensing approach for mobile data gathering in wireless sensor network systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 99, 1–13. [Google Scholar] [CrossRef]
- Candès, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies? IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Candès, E.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Shah, R.C.; Roy, S.; Jain, S.; Brunette, W. Data MULEs: Modeling and analysis of a three-tier architecture for sparse sensor networks. Ad Hoc Netw. 2003, 1, 215–233. [Google Scholar] [CrossRef]
- Lee, C.H.; Xu, X.; Eun, D.Y. Beyond random walk and metropolis-hastings samplers: Why you should not backtrack for unbiased graph sampling. In Proceedings of the SIGMETRICS Performance, London, UK, 15–16 June 2012; pp. 319–330. [Google Scholar]
- Zhao, J.; Xi, W.; He, Y.; Liu, Y.; Li, X.Y.; Mo, L.; Yang, Z. Localization of wireless sensor networks in the wild: Pursuit of ranging quality. IEEE/ACM Trans. Netw. 2013, 21, 311–323. [Google Scholar] [CrossRef]
- Liang, Z. Eigen-Analysis of Kernel Operators for Nonlinear Dimension Reduction. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2014. [Google Scholar]
- Duarte, M.F.; Baraniuk, R.G. Kronecker compressive sensing. IEEE Trans. Image Process. 2012, 21, 494–504. [Google Scholar] [CrossRef] [PubMed]
- Davenport, M.A. Random Observations on Random Observations: Sparse Signal Acquisition and Processing. Ph.D. Thesis, Rice University, Houston, TX, USA, 2010. [Google Scholar]
- Avin, C.; Ercal, G. On the cover time and mixing time of random geometric graphs. Theor. Comput. Sci. 2007, 380, 2–22. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming. Available online: http://cvxr.com/cvx/ (accessed on 28 April 2017).
- National Center for Atmospheric Research Staff (Ed.) Last Modified 6 May 2013. The Climate Data Guide: SST (AMSR-E): Sea Surface Temperature from Remote Sensing Systems. Available online: https://climatedataguide.ucar.edu/guidance/sst-amsr-e-sea-surface-temperature-remote-sensing-systems (accessed on 2 May 2017).
- Zordan, D.; Quer, G.; Zorzi, M.; Rossi, M. Modeling and generation of space-time correlated signals for sensor network fields. In Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM), Kathmandu, Nepal, 5–9 December 2011. [Google Scholar]
- Dimakis, A.G.; Kar, S.; Moura, J.M.F.; Rabbat, M.G.; Scaglione, A. Gossip algorithms for distributed signal processing. Proc. IEEE 2010, 98, 1847–1864. [Google Scholar] [CrossRef]
- Chung, F. Spectral Graph Theory. In CBMS Regional Conference Series in Mathematics; American Mathematical Society: Providence, RI, USA, 1997; pp. 1–21. [Google Scholar]
- Xue, F.; Kumar, P.R. The number of neighbors needed for connectivity of wireless networks. Wirel. Netw. 2004, 10, 169–181. [Google Scholar] [CrossRef]











© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, H.; Li, J.; Feng, X.; Guo, W.; Chen, Z.; Xiong, N. Spatial-Temporal Data Collection with Compressive Sensing in Mobile Sensor Networks. Sensors 2017, 17, 2575. https://doi.org/10.3390/s17112575
Zheng H, Li J, Feng X, Guo W, Chen Z, Xiong N. Spatial-Temporal Data Collection with Compressive Sensing in Mobile Sensor Networks. Sensors. 2017; 17(11):2575. https://doi.org/10.3390/s17112575
Chicago/Turabian StyleZheng, Haifeng, Jiayin Li, Xinxin Feng, Wenzhong Guo, Zhonghui Chen, and Neal Xiong. 2017. "Spatial-Temporal Data Collection with Compressive Sensing in Mobile Sensor Networks" Sensors 17, no. 11: 2575. https://doi.org/10.3390/s17112575
APA StyleZheng, H., Li, J., Feng, X., Guo, W., Chen, Z., & Xiong, N. (2017). Spatial-Temporal Data Collection with Compressive Sensing in Mobile Sensor Networks. Sensors, 17(11), 2575. https://doi.org/10.3390/s17112575