System Modeling of a MEMS Vibratory Gyroscope and Integration to Circuit Simulation


Abstract
:1. Introduction
2. Methods
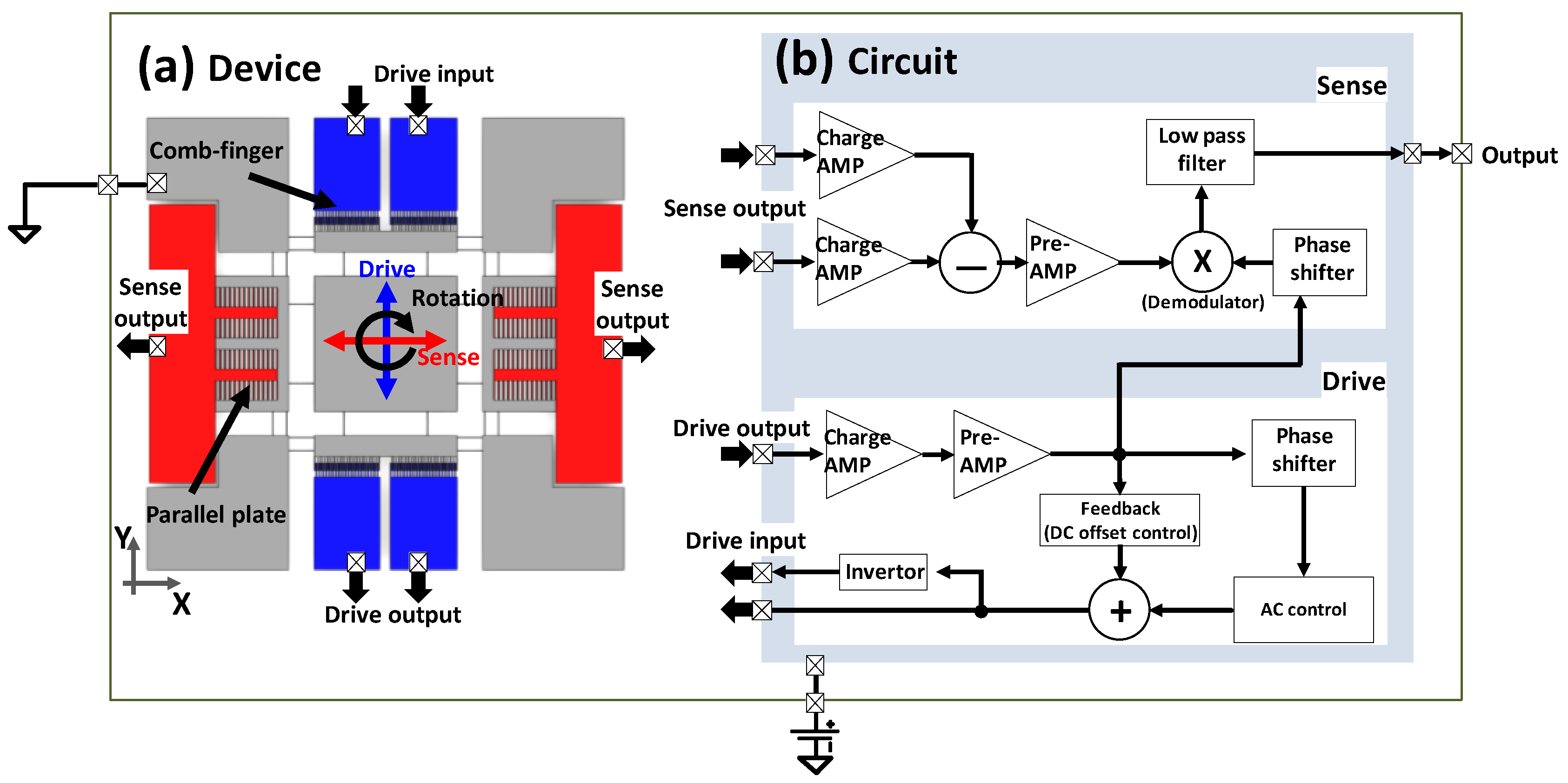
2.1. Mechanism of the MEMS Vibratory Gyroscope
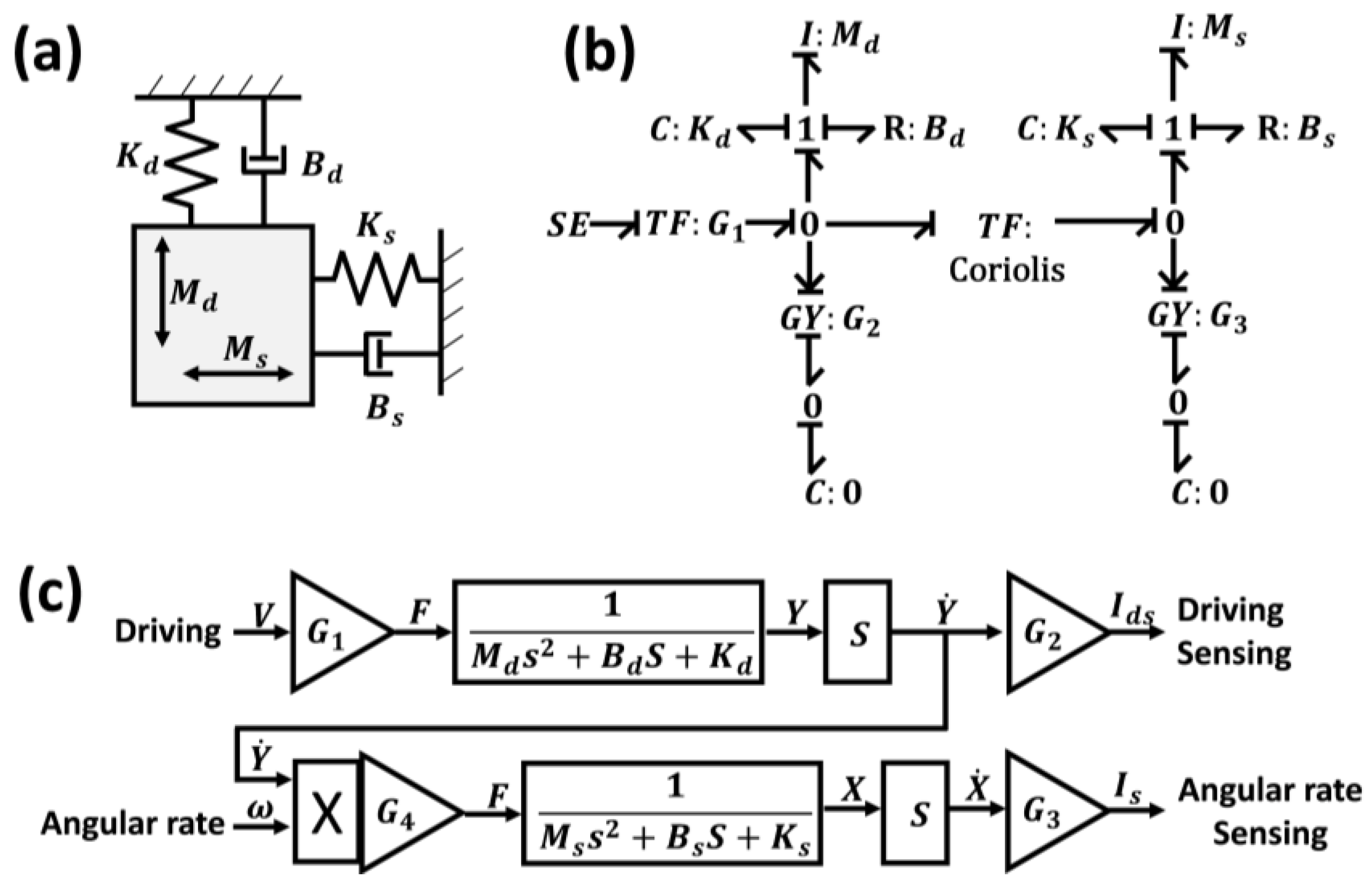
2.2. Gyroscope Dynamics Expressed by an Equation
2.3. Determination of the Mass–Spring–Damper Elements
2.4. Determination of G1–G4
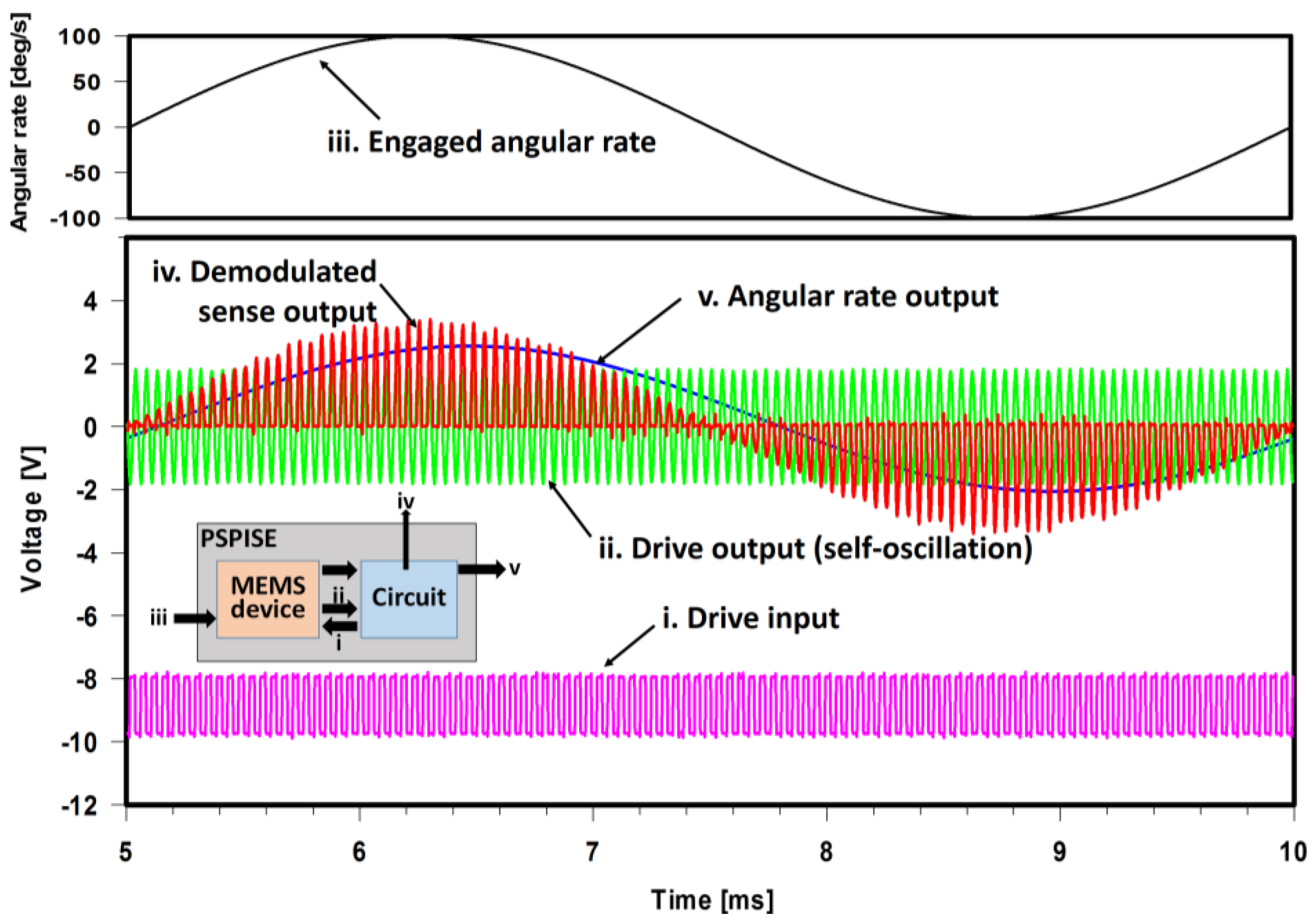
2.5. Integration of the Gyroscope and Electrical Circuit
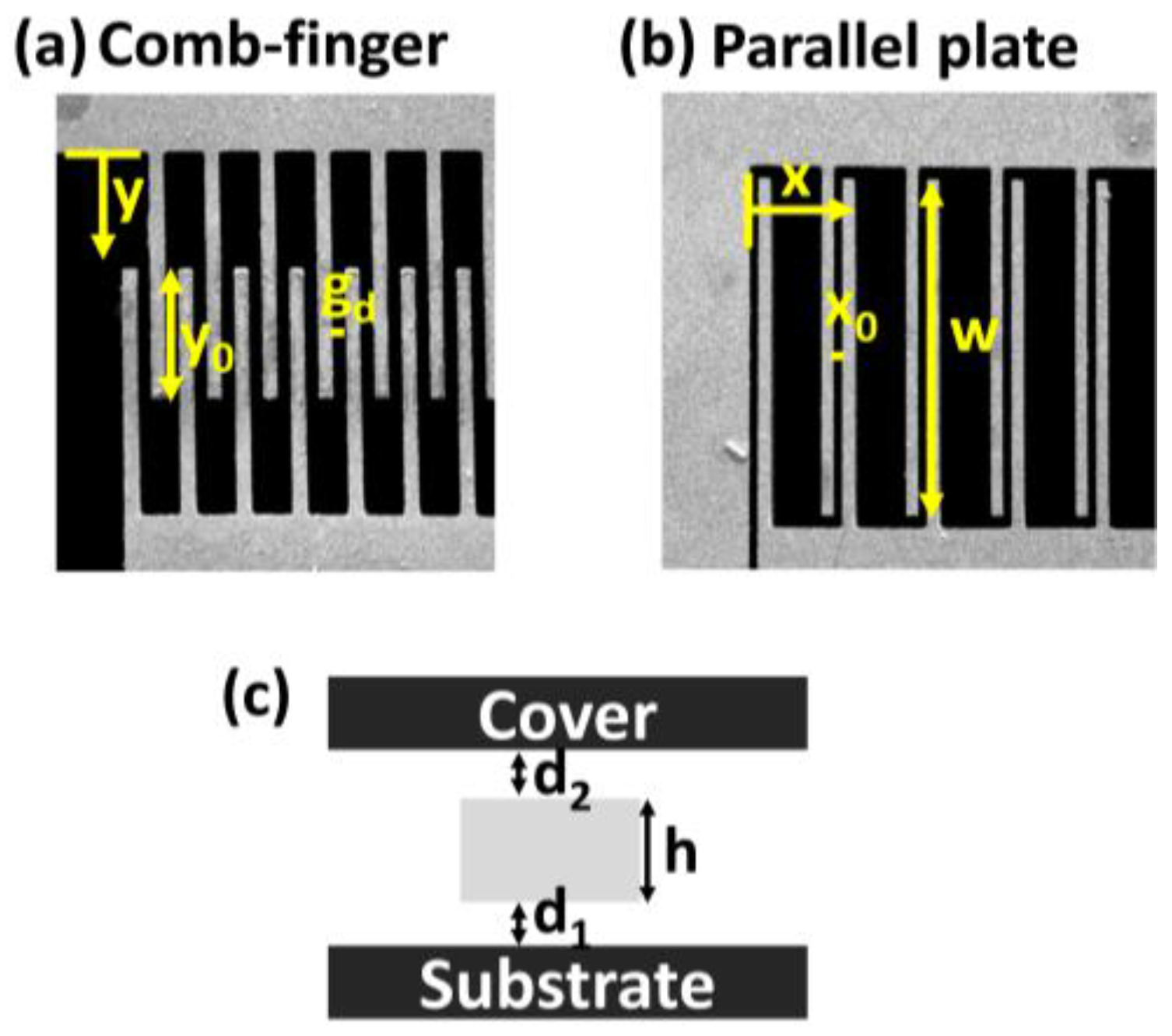
2.6. Dimension and Experimental Setup of Actual Gyroscope Device
3. Result
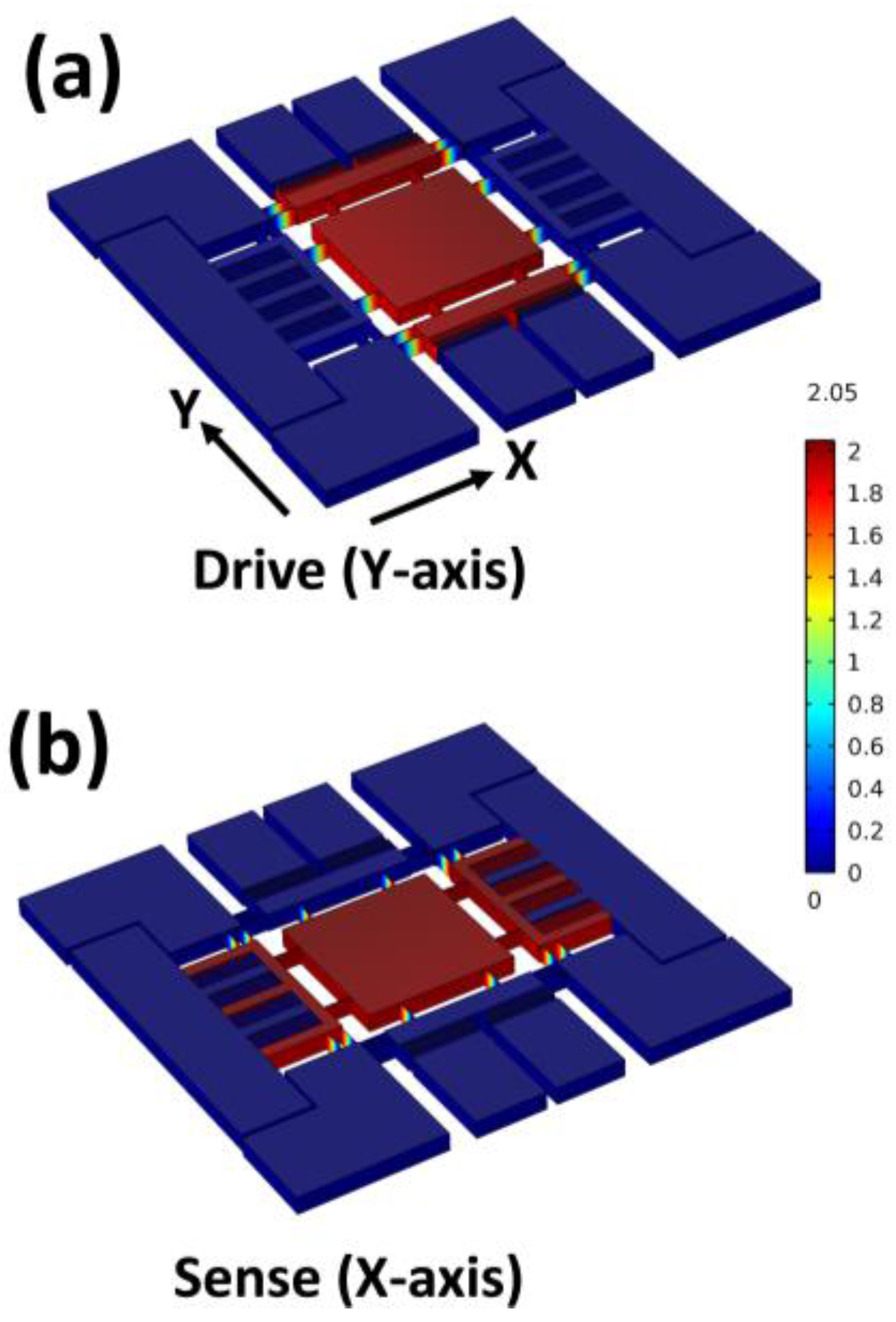
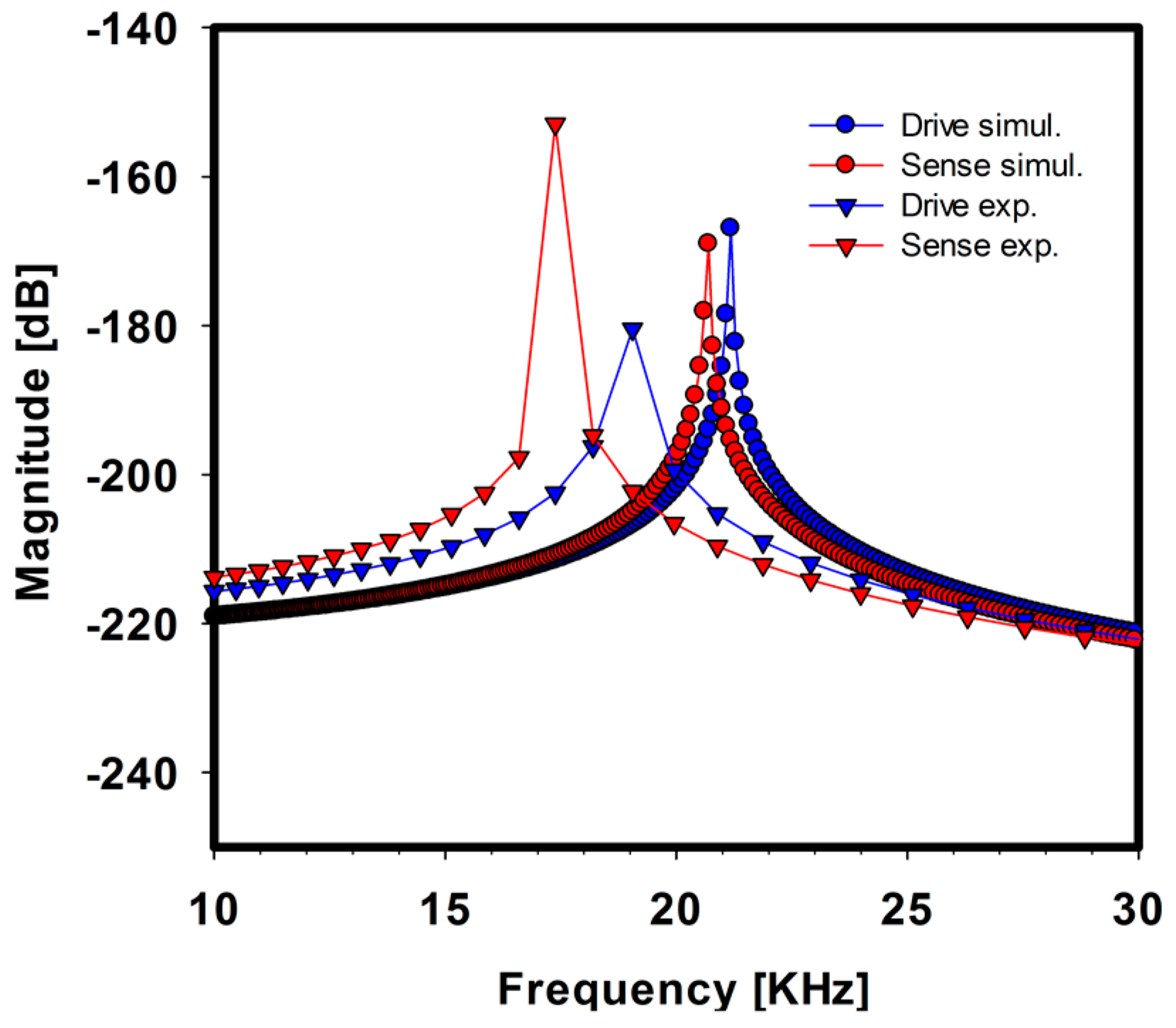
3.1. Natural Frequency of the Drive and Sense Axes
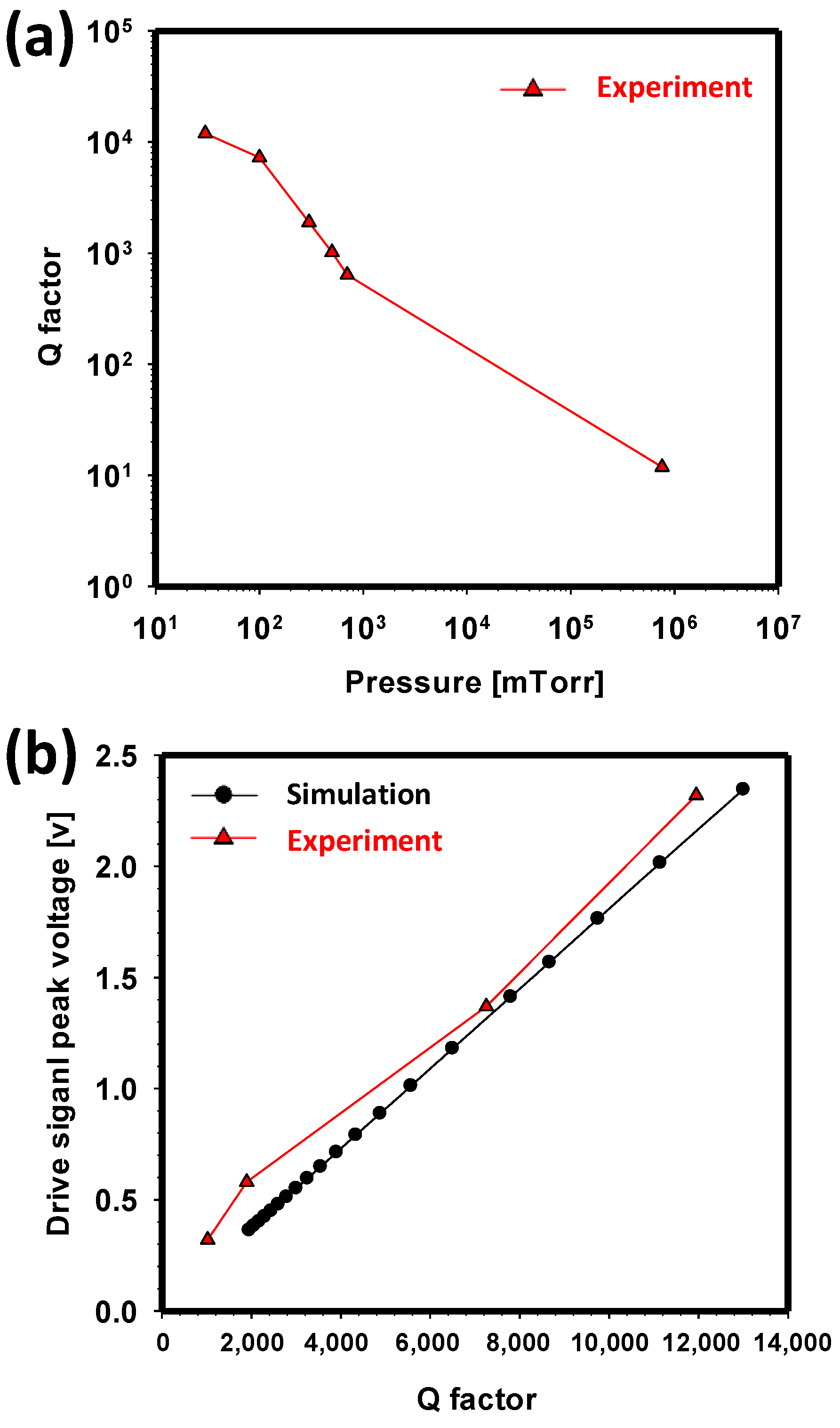
3.2. Determination of the Q Factor
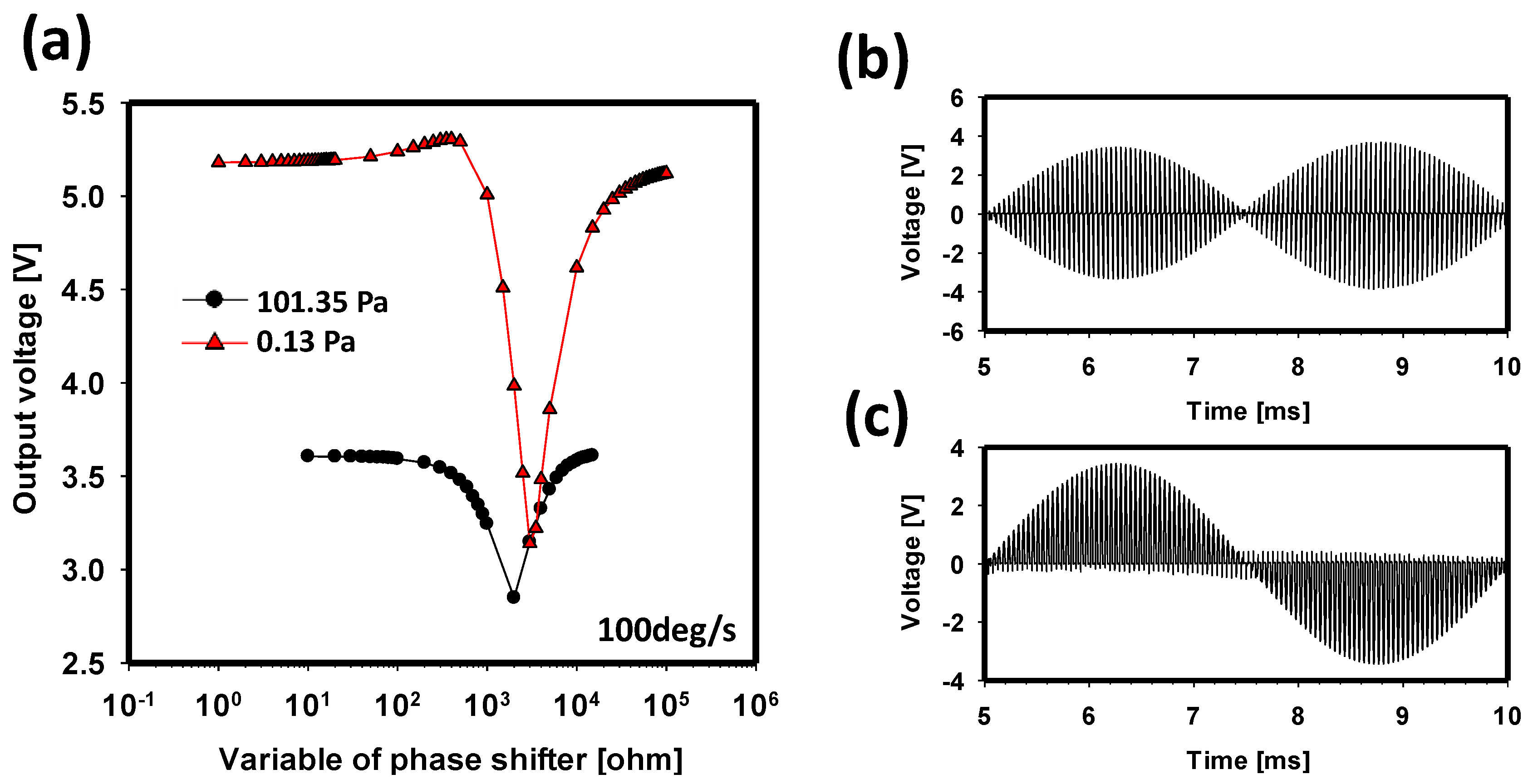
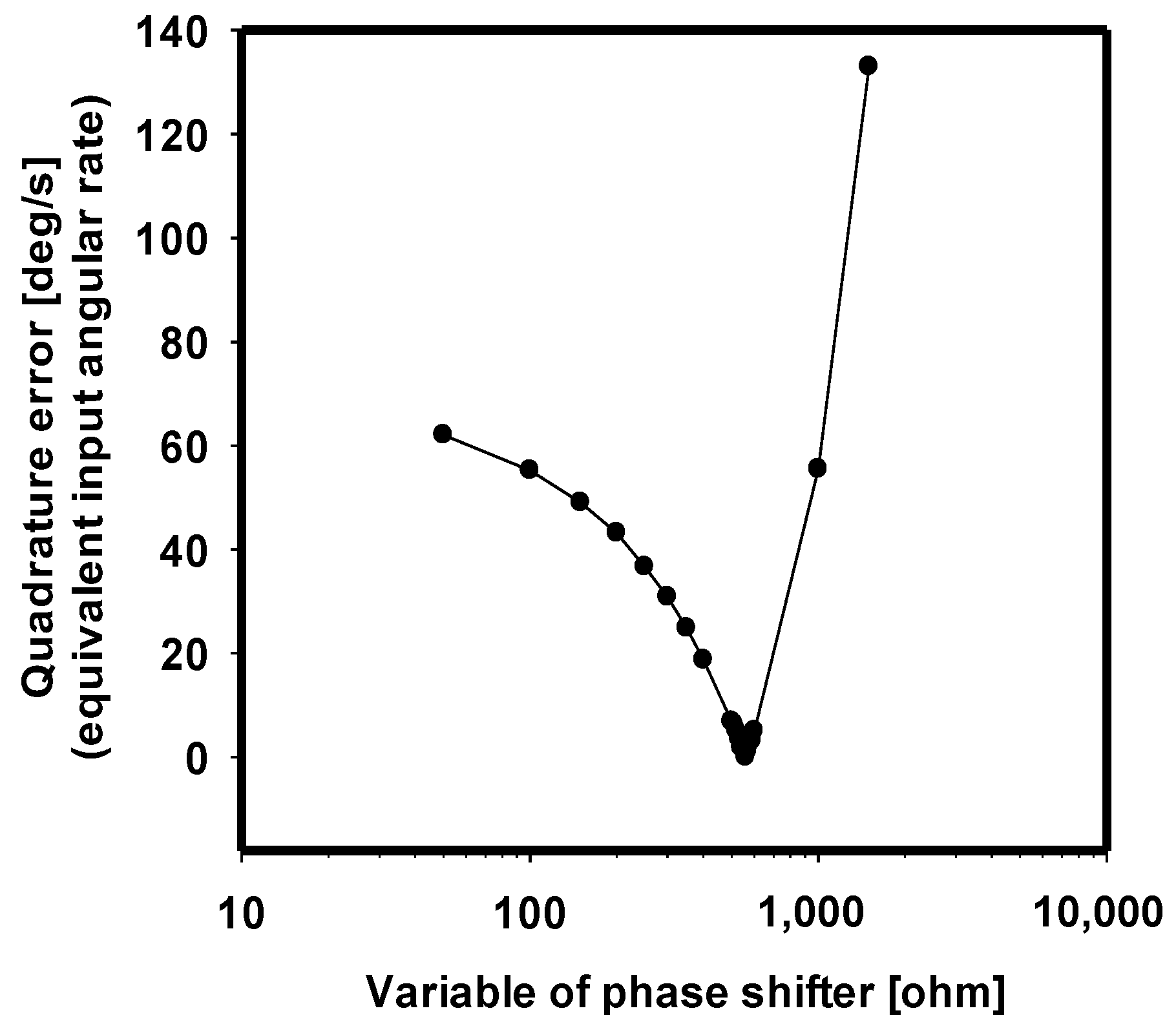
3.3. Optimization of Demodulation and Minimizing a Quadrature Error
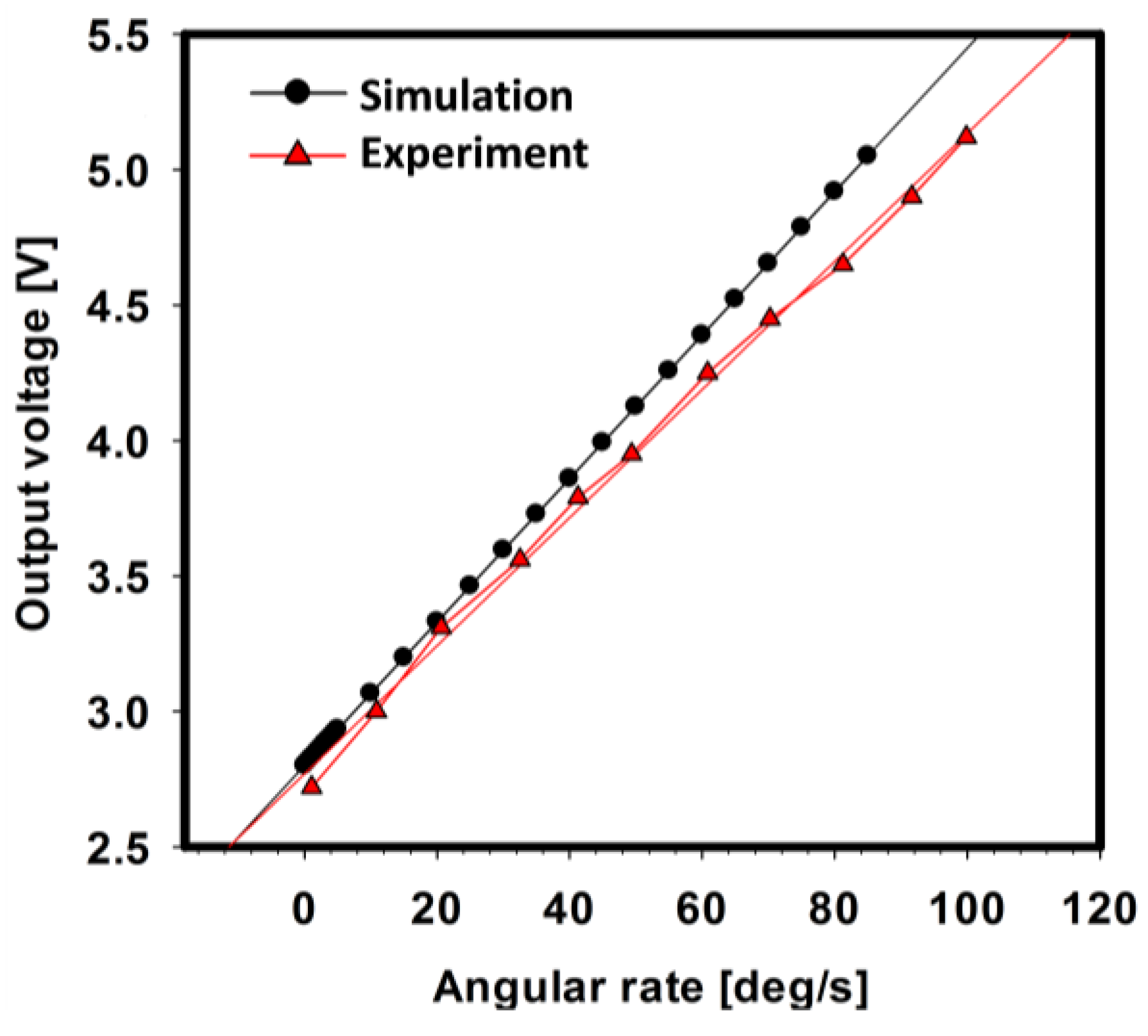
3.4. Output Voltage as Function of Angular Rate
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shkel, A.M. Micromachined Gyroscopes: Challenges, Design Solutions and Opportunities. In Proceedings of the SPIE’s 8th Annual Intertional Symposium on Structure and Materials, Newport Beach, CA, USA, 4 March 2001; Volume 4334, pp. 74–85. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, W.; Chen, W.; Li, K.; Dai, F.; Cui, F.; Wu, X.; Ma, G.; Xiao, Q. The development of micro-gyroscope technology. J. Micromech. Microeng. 2009, 19, 113001. [Google Scholar] [CrossRef]
- Söderkvist, J. Micromachined gyroscopes. Sens. Actuators A Phys. 1994, 43, 65–71. [Google Scholar] [CrossRef]
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. IEEE Sens. J. 2001, 1, 332–339. [Google Scholar] [CrossRef]
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1658. [Google Scholar] [CrossRef]
- Zhanshe, G.; Fucheng, C.; Boyu, L.; Le, C.; Chao, L.; Ke, S. Research development of silicon MEMS gyroscopes: A review. Microsyst. Technol. 2015, 21, 2053–2066. [Google Scholar] [CrossRef]
- Mukherjee, T.; Fedder, G.K. Hierarchical Mixed-Domain Circuit Simulation, Synthesis and Extraction Methodology for MEMS. J. VLSI Signal Process. 1999, 21, 233–249. [Google Scholar] [CrossRef]
- Ongkodjojo, A.; Tay, F.E.H. Global optimization and design for microelectromechanical systems devices based on simulated annealing. J. Micromech. Microeng. 2002, 12, 878–897. [Google Scholar] [CrossRef]
- Mohite, S.; Patil, N.; Pratap, R. Design, modelling and simulation of vibratory micromachined gyroscopes. J. Phys. Conf. Ser. 2006, 34, 757–763. [Google Scholar] [CrossRef]
- Rajendran, S.; Liew, K.M. Design and simulation of an angular-rate vibrating microgyroscope. Sens. Actuators A Phys. 2004, 116, 241–256. [Google Scholar] [CrossRef]
- Rashed, R.; Momeni, H. System modeling of MEMS Gyroscopes. In Proceedings of the IEEE Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–6. [Google Scholar]
- Patel, C.; McCluskey, P. Modeling and simulation of the MEMS vibratory gyroscope. In Proceedings of the IEEE 13th InterSociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems, San Diego, CA, USA, 30 May–1 June 2012; pp. 928–933. [Google Scholar]
- Tilmans, H.A.C. Equivalent circuit representation of electromechanical transducers: II. Distributed-parameter systems. J. Micromech. Microeng. 1997, 7, 285–309. [Google Scholar] [CrossRef]
- Che, L.; Xiong, B.; Wang, Y. System modelling of a vibratory micromachined gyroscope with bar structure. J. Micromech. Microeng. 2003, 13, 65–71. [Google Scholar] [CrossRef]
- Tanaka, K.; Sugimoto, M.; Moriya, K.; Hasegawa, T.; Atsuchi, K.; Ohwada, K. A micromachined vibrating gyroscope. Sens. Actuators A Phys. 1995, 50, 111–115. [Google Scholar] [CrossRef]
- Abdolvand, R.; Bahreyni, B.; Lee, J.; Nabki, F. Micromachined Resonators: A Review. Micromachines 2016, 7, 160. [Google Scholar] [CrossRef]
- Mohammed, Z.; Waheed, O.T.; Elfadel, I.A.M.; Chatterjee, A.; Rasras, M. Design, Analysis and System-Level Modelling of a Single Axis Capacitive Accelerometer. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Phoenix, AZ, USA, 11–17 November 2016. Volume 10: Micro- and Nano-Systems Engineering and Packaging. [Google Scholar] [CrossRef]
- Fei, J.; Dai, W.; Hua, M.; Xue, Y. System Dynamics and Adaptive Control of MEMS Gyroscope Sensor. IFAC Proc. Vol. 2011, 44, 3551–3556. [Google Scholar] [CrossRef]
- Lv, B.; Liu, X.; Yang, Z.; Yan, G. Simulation of a novel lateral axis micromachined gyroscope in the presence of fabrication imperfections. Microsyst. Technol. 2008, 14, 711–718. [Google Scholar] [CrossRef]
- Han, J.S.; Kwak, B.M. Robust optimal design of a vibratory microgyroscope considering fabrication errors. J. Micromech. Microeng. 2001, 11, 662–671. [Google Scholar] [CrossRef]
- Fedder, G.K. Top-down design of MEMS. In Proceedings of the Intertional Conference on Modeling and Simulation of Microsystems Semiconductors, Sensors and Actuators (MSM ‘00), San Diego, CA, USA, 27–29 March 2000; Volume 10, pp. 7–10. [Google Scholar]
- Sung, J.; Kim, J.Y.; Seok, S.; Kwon, H.J.; Kim, M.; Kim, G.; Lim, G. A gyroscope fabrication method for high sensitivity and robustness to fabrication tolerances. J. Micromech. Microeng. 2014, 24, 75013. [Google Scholar] [CrossRef]
- Starke, E.; Marschner, U. Lumped Circuit Model for Gyro Sensors Incorporating Coriolis and Centrifugal Force. Procedia Eng. 2014, 87, 432–435. [Google Scholar] [CrossRef]
- Gawthrop, P.J.; Bevan, G.P. Bond-graph modeling. IEEE Control Syst. Mag. 2007, 27, 24–45. [Google Scholar] [CrossRef]
- Jing, Q.; Mukherjee, T.; Fedder, G.K. Schematic-based lumped parameterized behavioral modeling for suspended MEMS. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design, San Jose, CA, USA, 10–14 November 2002; pp. 367–373. [Google Scholar] [CrossRef]
- Cho, Y.H.; Pisano, A.P.; Howe, R.T. Viscous damping model laterally oscillating microstructures. J. Microelectromech. Syst. 1994, 3, 81–87. [Google Scholar] [CrossRef]
- Tang, W.C. Viscous air damping in laterally driven microresonators. In Proceedings of the IEEE Workshop on Micro Electro Mechanical Systems, Oiso, Japan, 25–28 January 1994; pp. 199–204. [Google Scholar] [CrossRef]
- Bao, M.; Yang, H. Squeeze film air damping in MEMS. Sens. Actuators A Phys. 2007, 136, 3–27. [Google Scholar] [CrossRef]
- Laghi, G.; Frangi, A.A.; Fedeli, P.; Gattere, G.; Langfelder, G. Comprehensive modelling and experimental verification of air damping coefficients in MEMS of complex geometry. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; Volume 2035, pp. 958–961. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Gap between sense electrodes | x0 | 9.46 µm |
| Length of overlapped comb finger | y0 | 135 µm |
| Thickness of the device | h | 250 µm |
| Gap between device and substrate | d1 | 50 µm |
| Gap between device and cover | d2 | 500 µm |
| Gap between comb fingers | gd | 14.5 µm |
| Length of overlapped parallel plates | w | 2.4 mm |
| Proof mass area of the drive-axis | Ad | 7.93 mm3 |
| Proof mass area of the sense-axis | As | 8.48 mm3 |
| Area of a single plate of comb finger | Adf | 0.0338 mm3 |
| Number of comb finger | nd | 164 |
| Number of parallel plate | ns | 112 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, H.J.; Seok, S.; Lim, G. System Modeling of a MEMS Vibratory Gyroscope and Integration to Circuit Simulation. Sensors 2017, 17, 2663. https://doi.org/10.3390/s17112663
Kwon HJ, Seok S, Lim G. System Modeling of a MEMS Vibratory Gyroscope and Integration to Circuit Simulation. Sensors. 2017; 17(11):2663. https://doi.org/10.3390/s17112663
Chicago/Turabian StyleKwon, Hyukjin J., Seyeong Seok, and Geunbae Lim. 2017. "System Modeling of a MEMS Vibratory Gyroscope and Integration to Circuit Simulation" Sensors 17, no. 11: 2663. https://doi.org/10.3390/s17112663
APA StyleKwon, H. J., Seok, S., & Lim, G. (2017). System Modeling of a MEMS Vibratory Gyroscope and Integration to Circuit Simulation. Sensors, 17(11), 2663. https://doi.org/10.3390/s17112663