
Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter

Abstract
:1. Introduction
2. Principle of the Integration Subsystem and Error Analysis
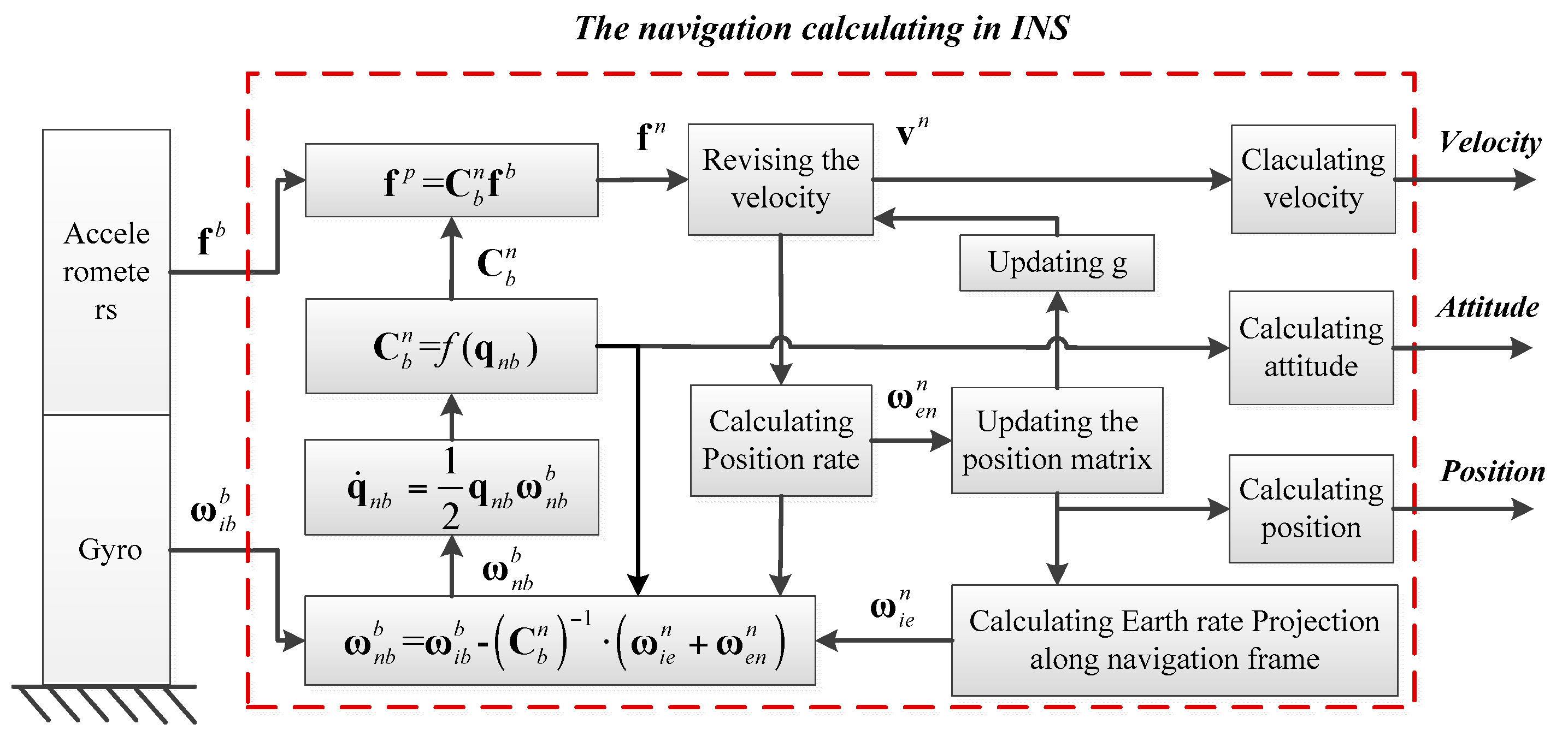
2.1. Principle of INS and System Error Model
2.1.1. Principle of INS
2.1.2. Error Analysis for INS
2.2. Principle of CNS and Error Analysis
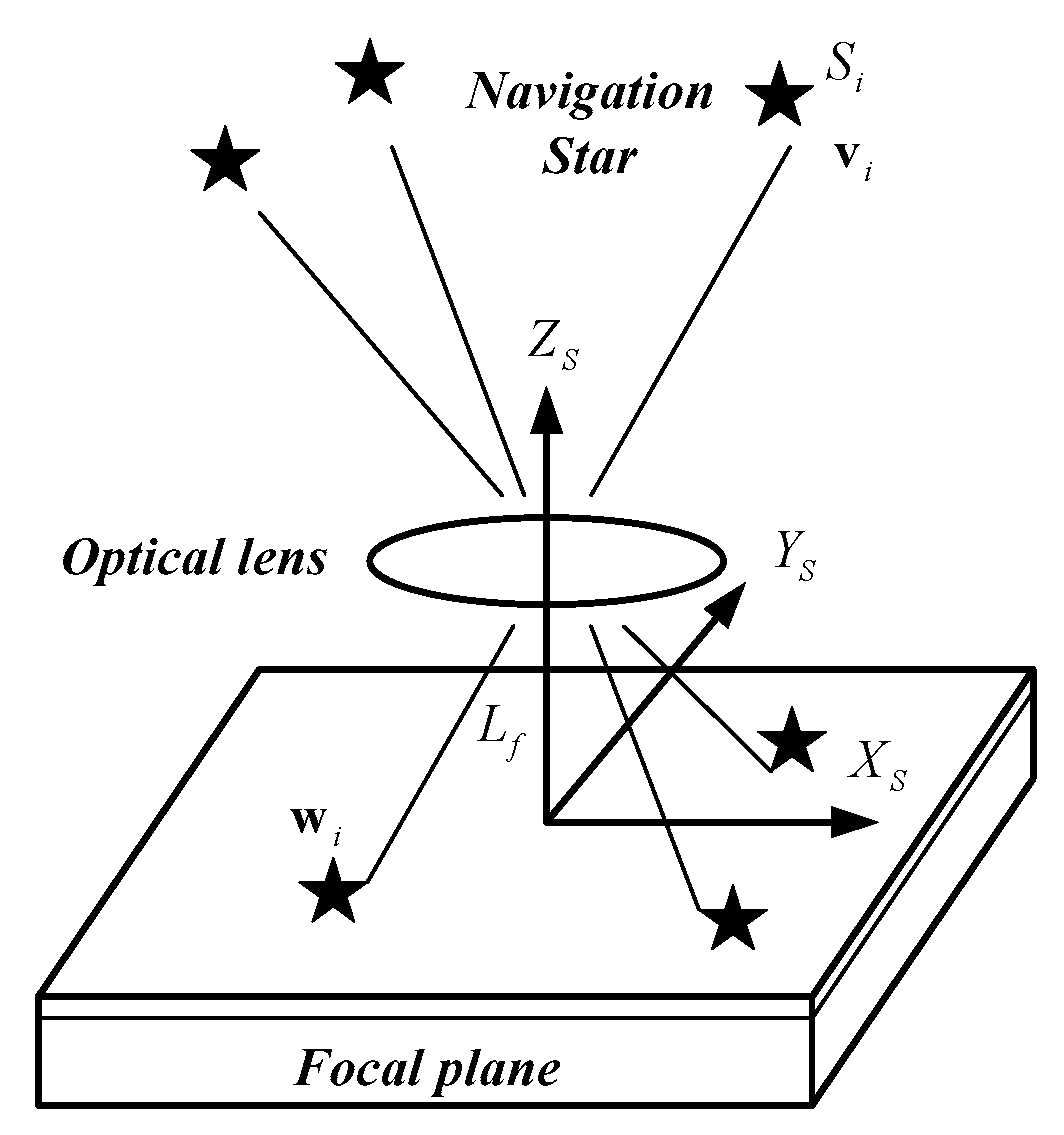
2.2.1. Principle of CNS
2.2.2. Error Analysis for CNS
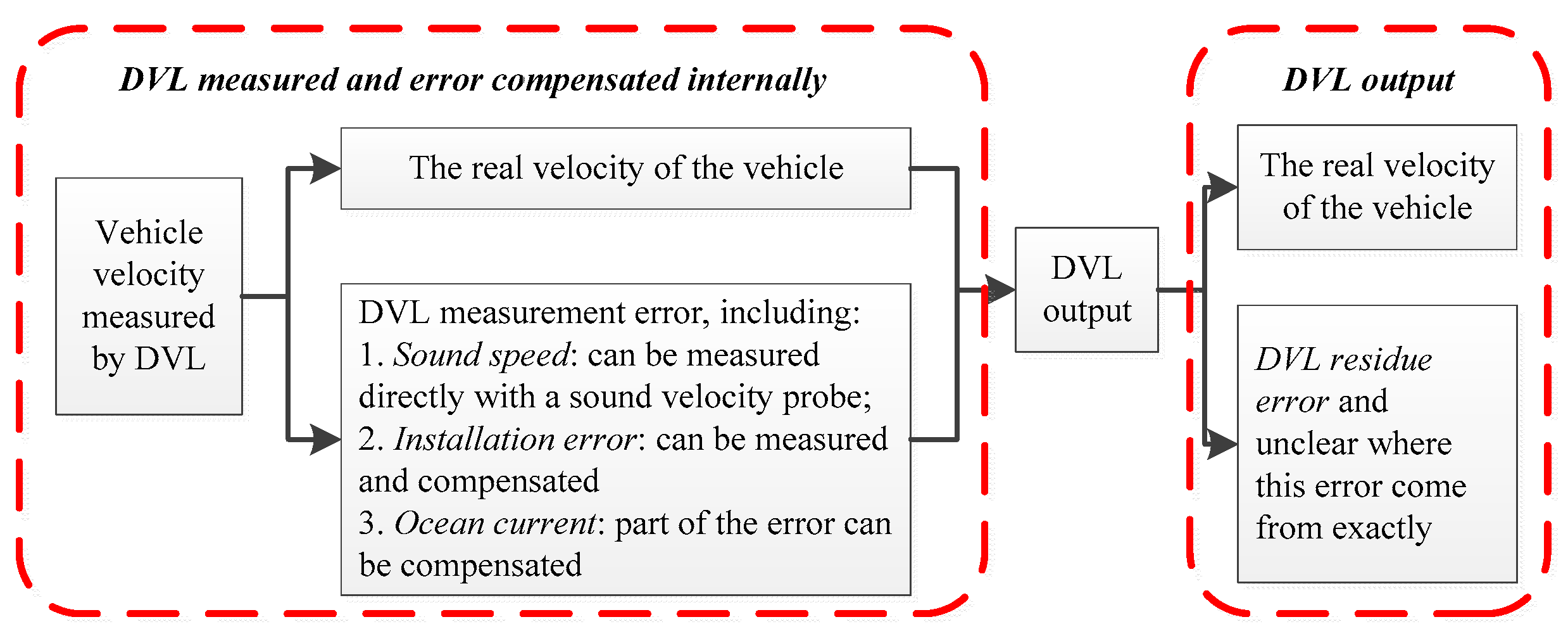
2.3. Principle of DVL and Error Analysis
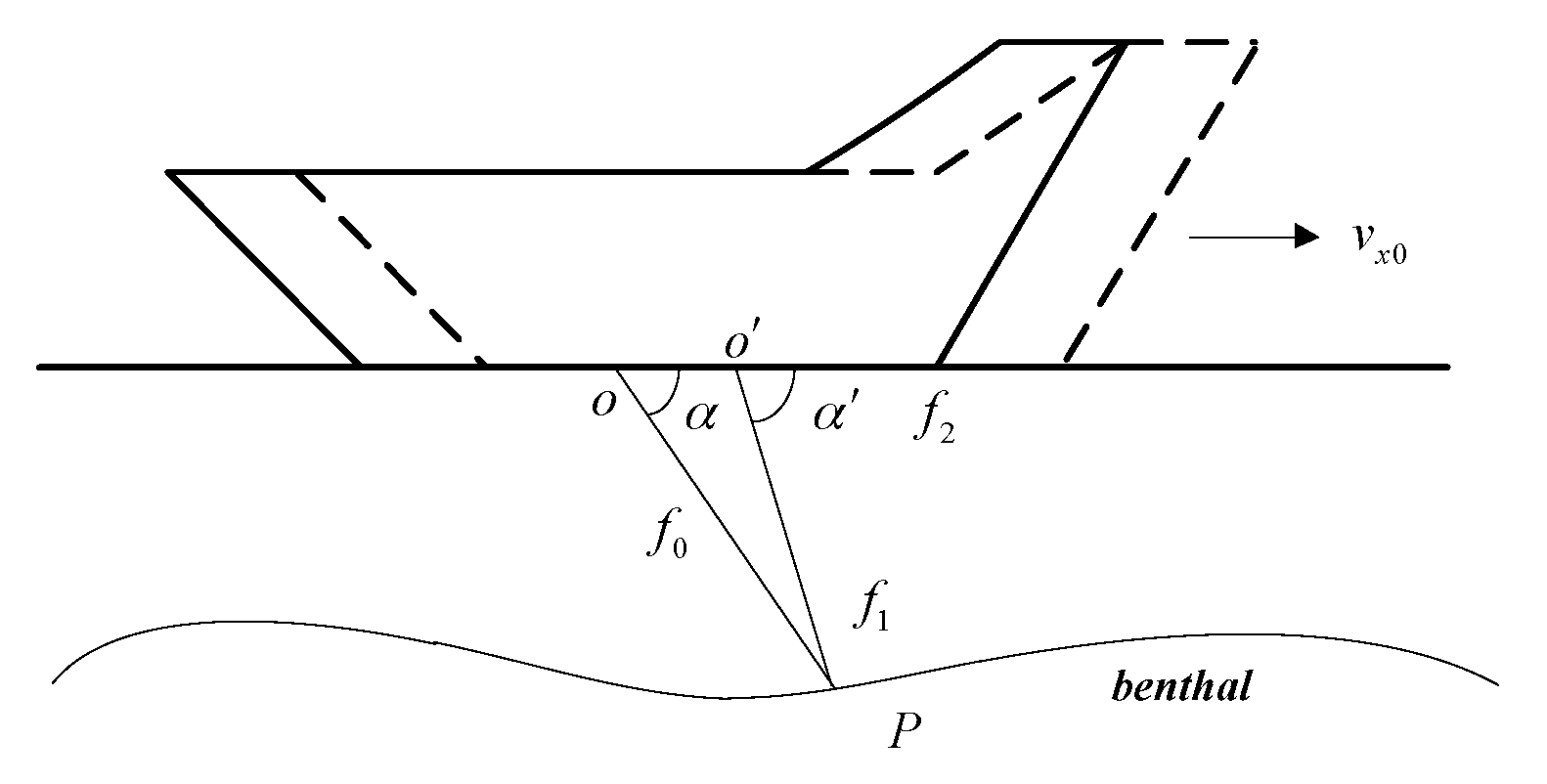
2.3.1. Principle of DVL
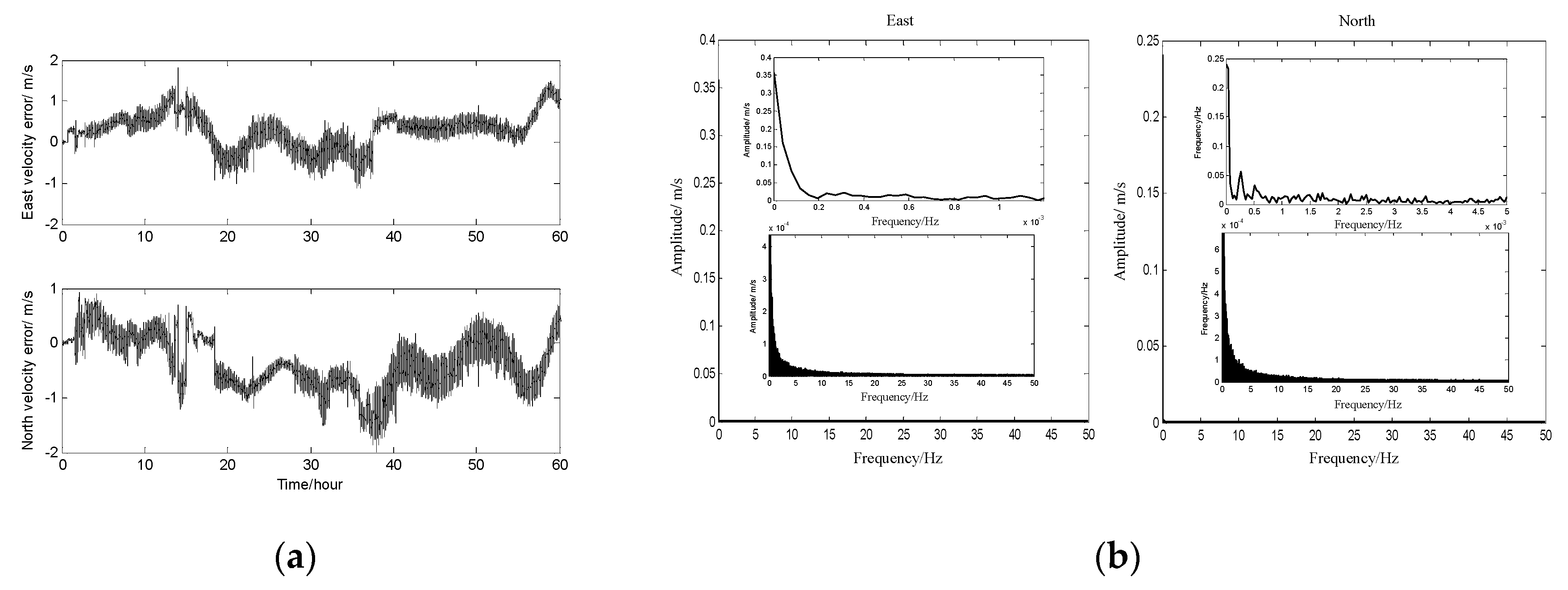
2.3.2. Error Analysis for DVL
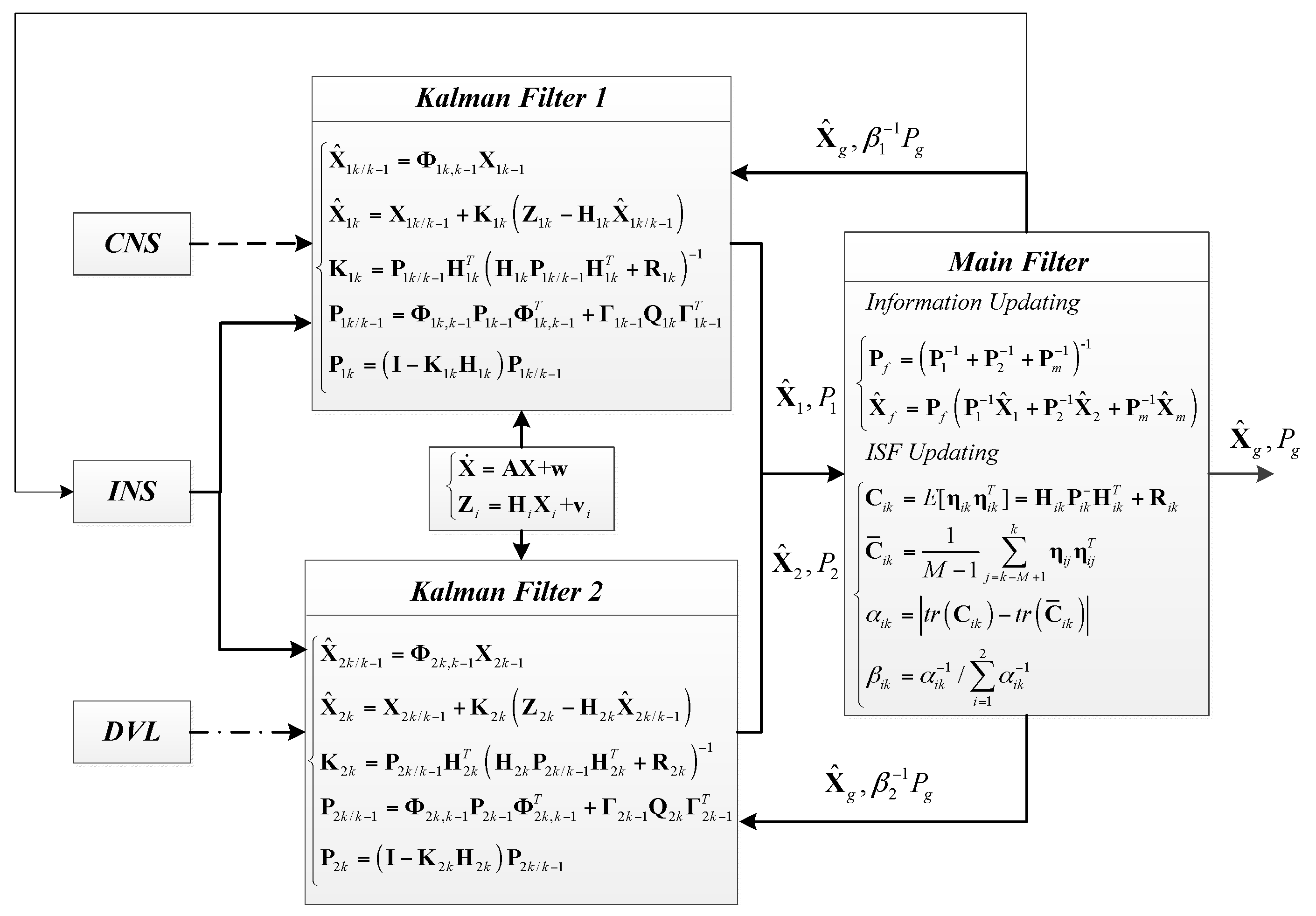
3. Federated Filter Based on the Adaptive Information Sharing Factor
3.1. The Principle of Federated Filter
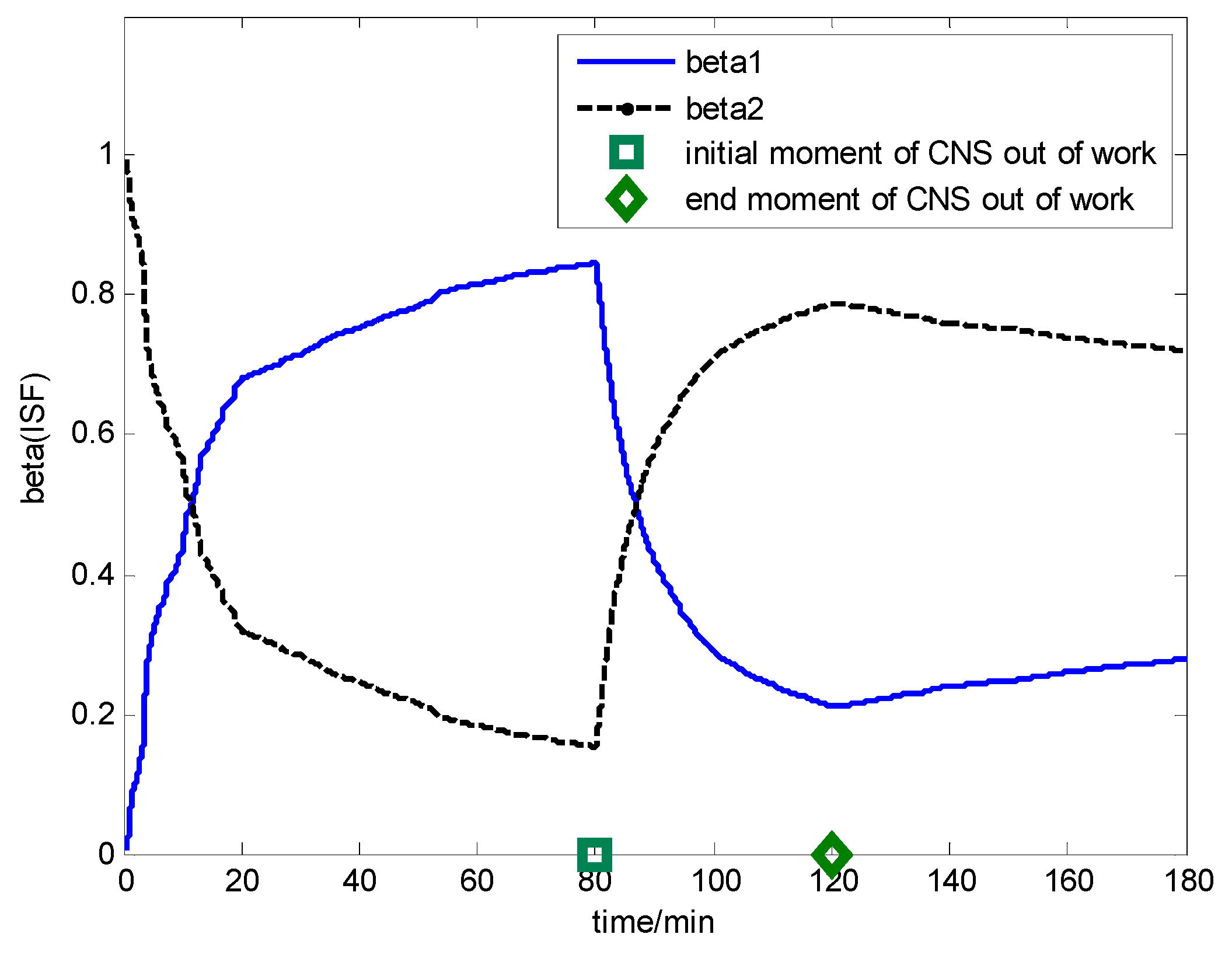
3.2. Adaptive Information Sharing Factor for Federated Filter
4. The Multi-Sensor Integrated Navigation Method Using the Adaptive ISF Federated Filter
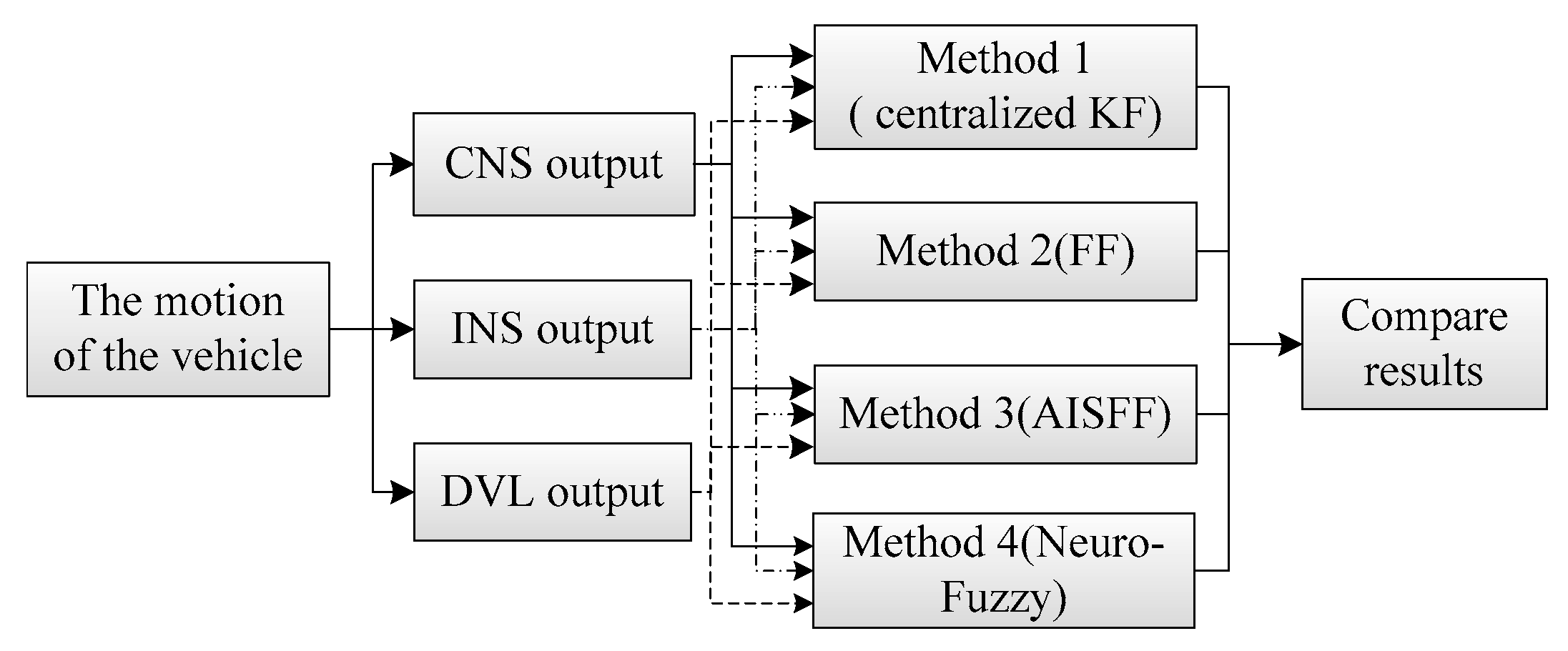
5. Analysis of the Simulation and the Experimental Study
5.1. The Simulation Analysis
5.1.1. Simulation Conditions
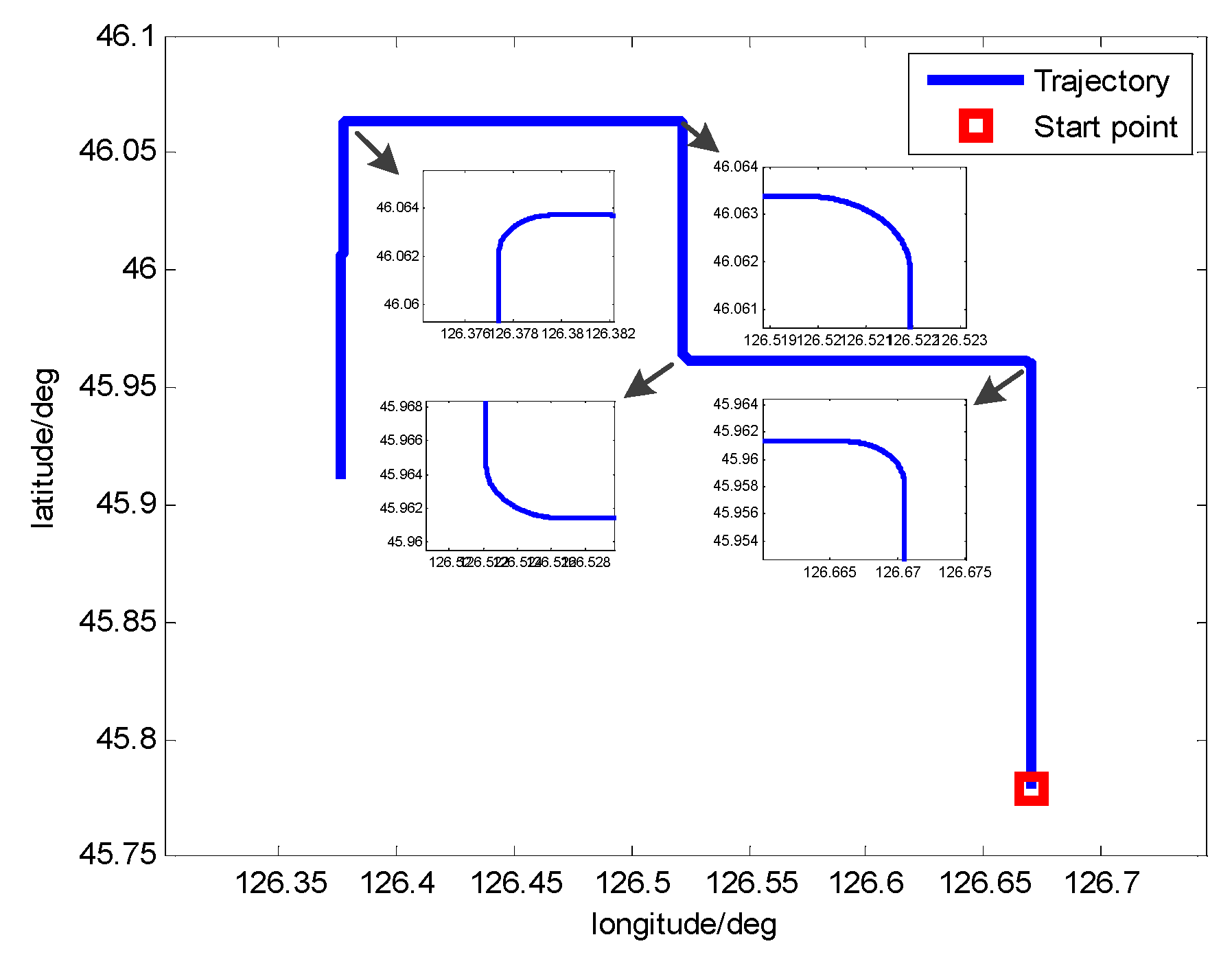
Motion State of the Vehicle
IMU, CNS and DVL Error
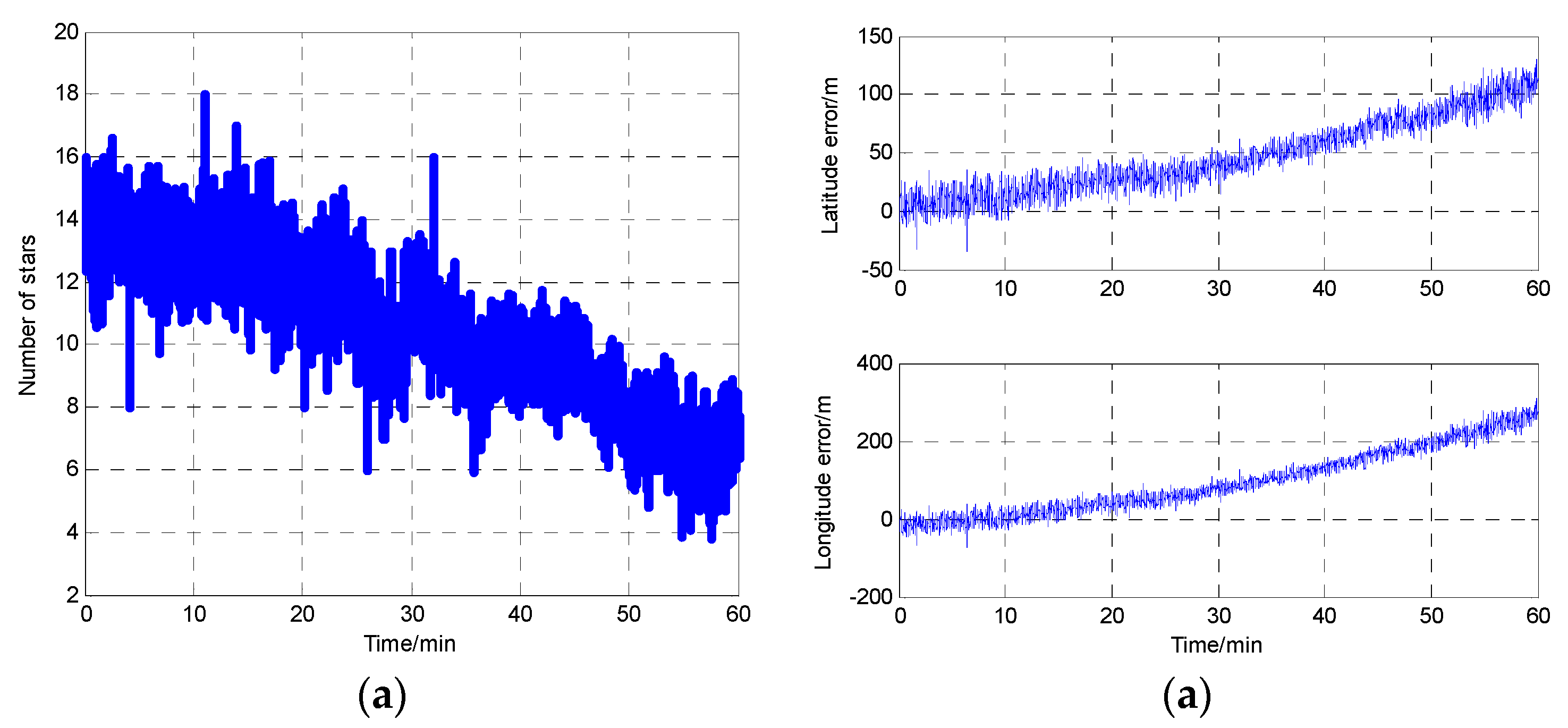
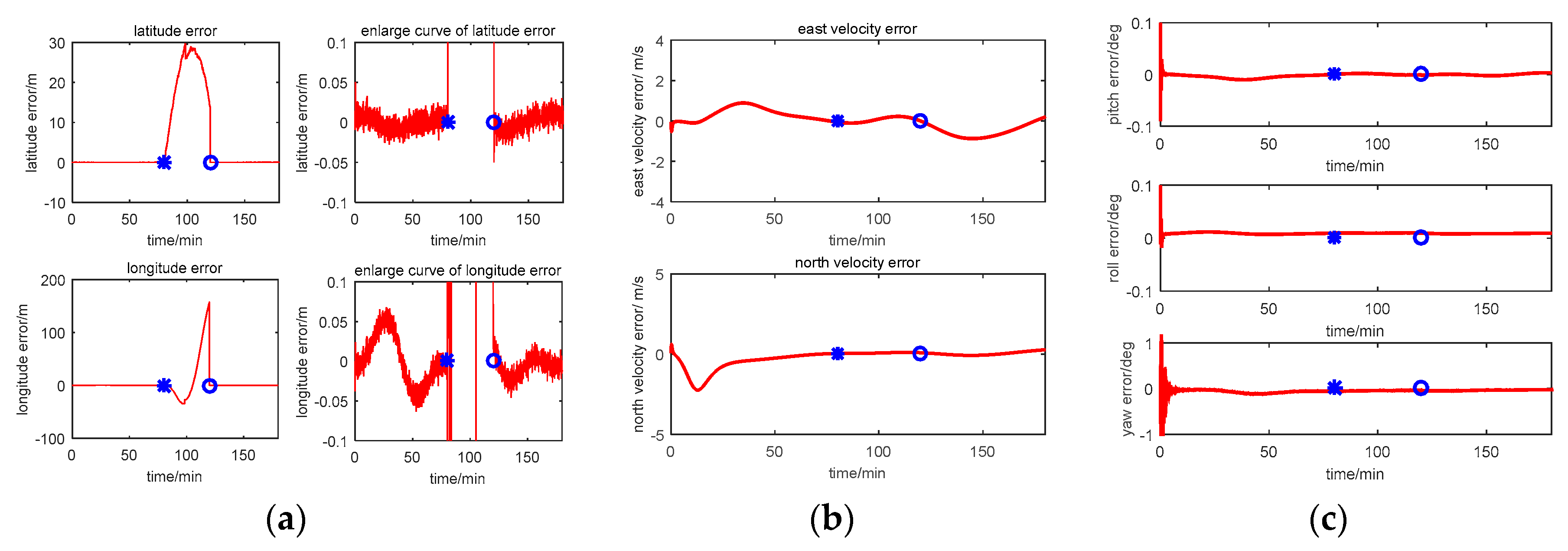
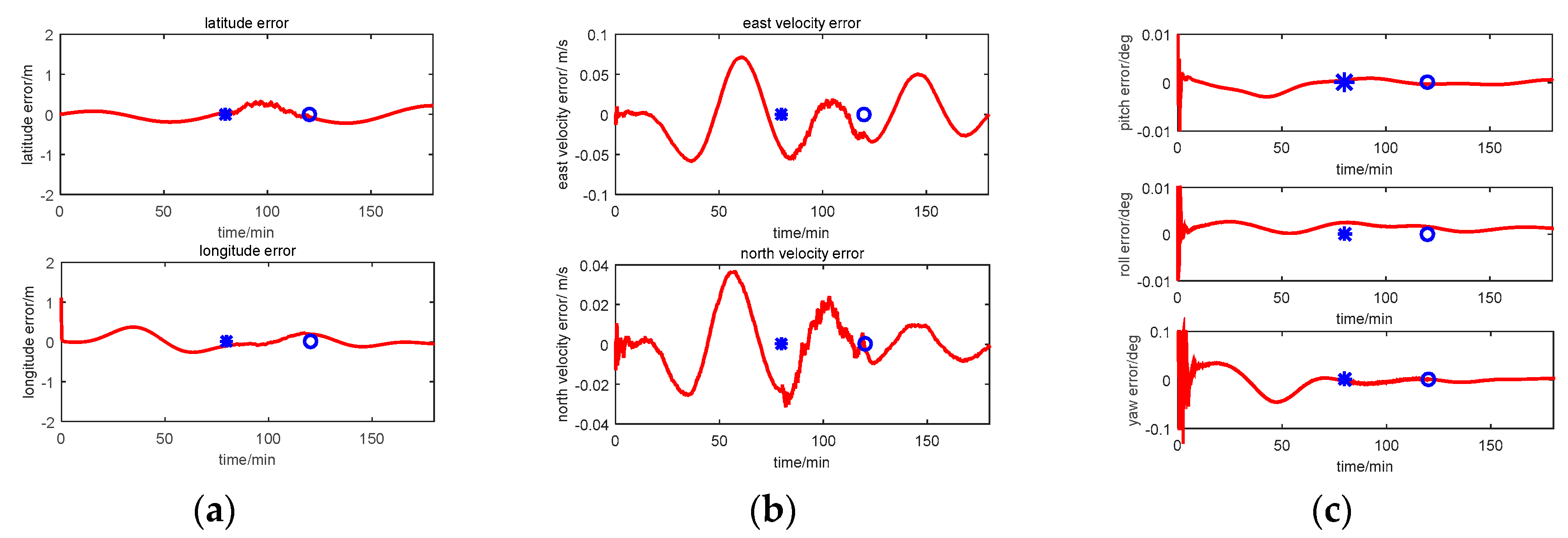
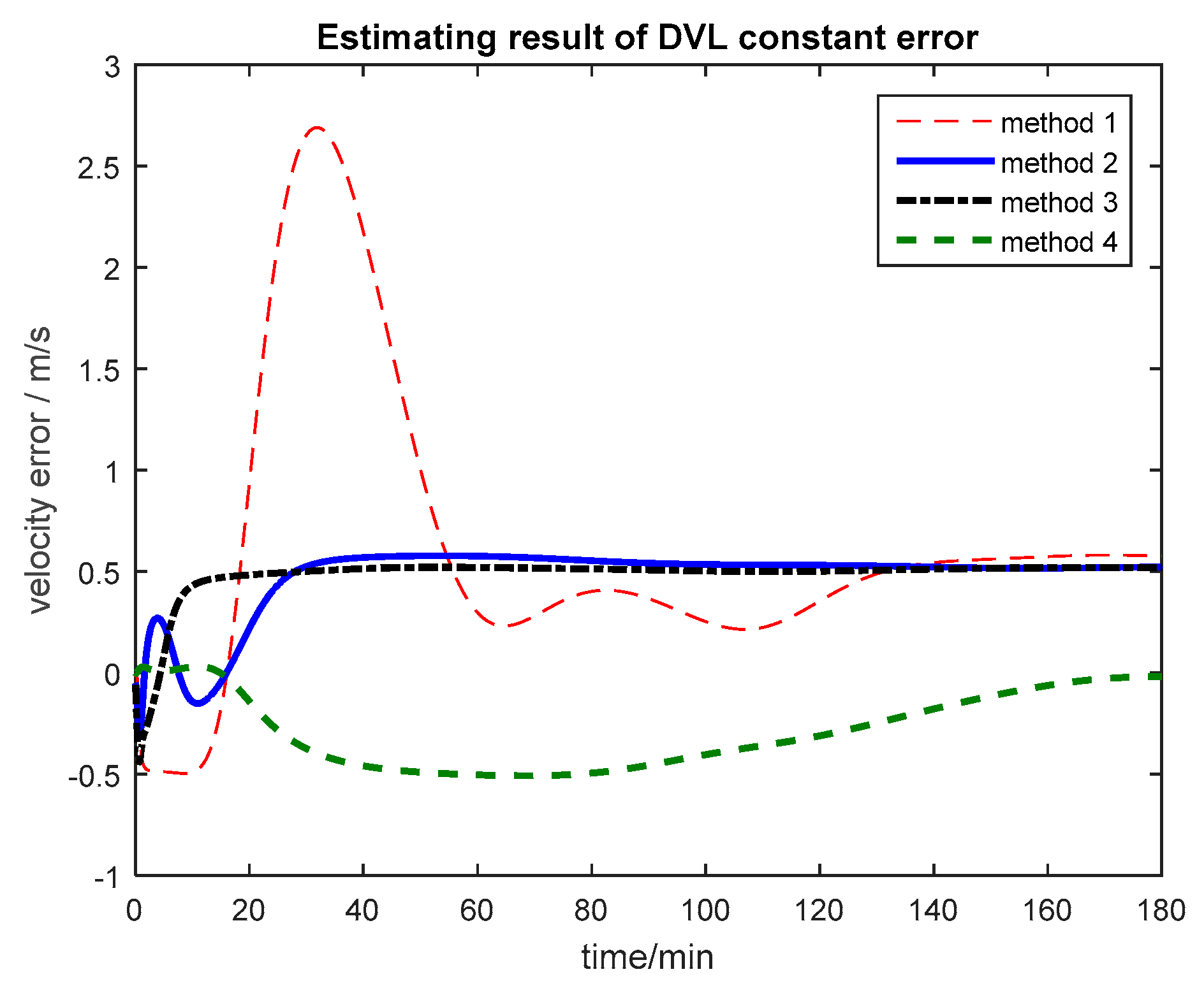
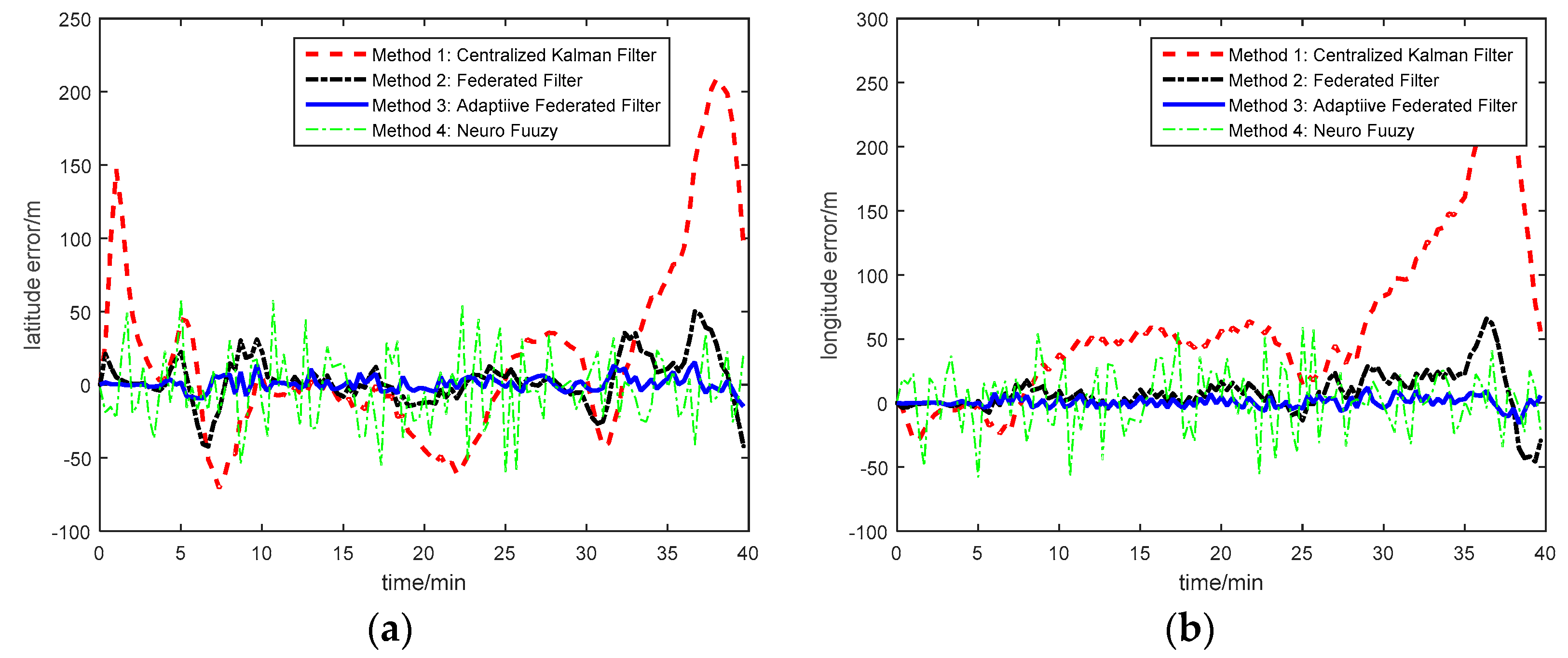
5.1.2. Simulation Results
5.2. Experiments and Results
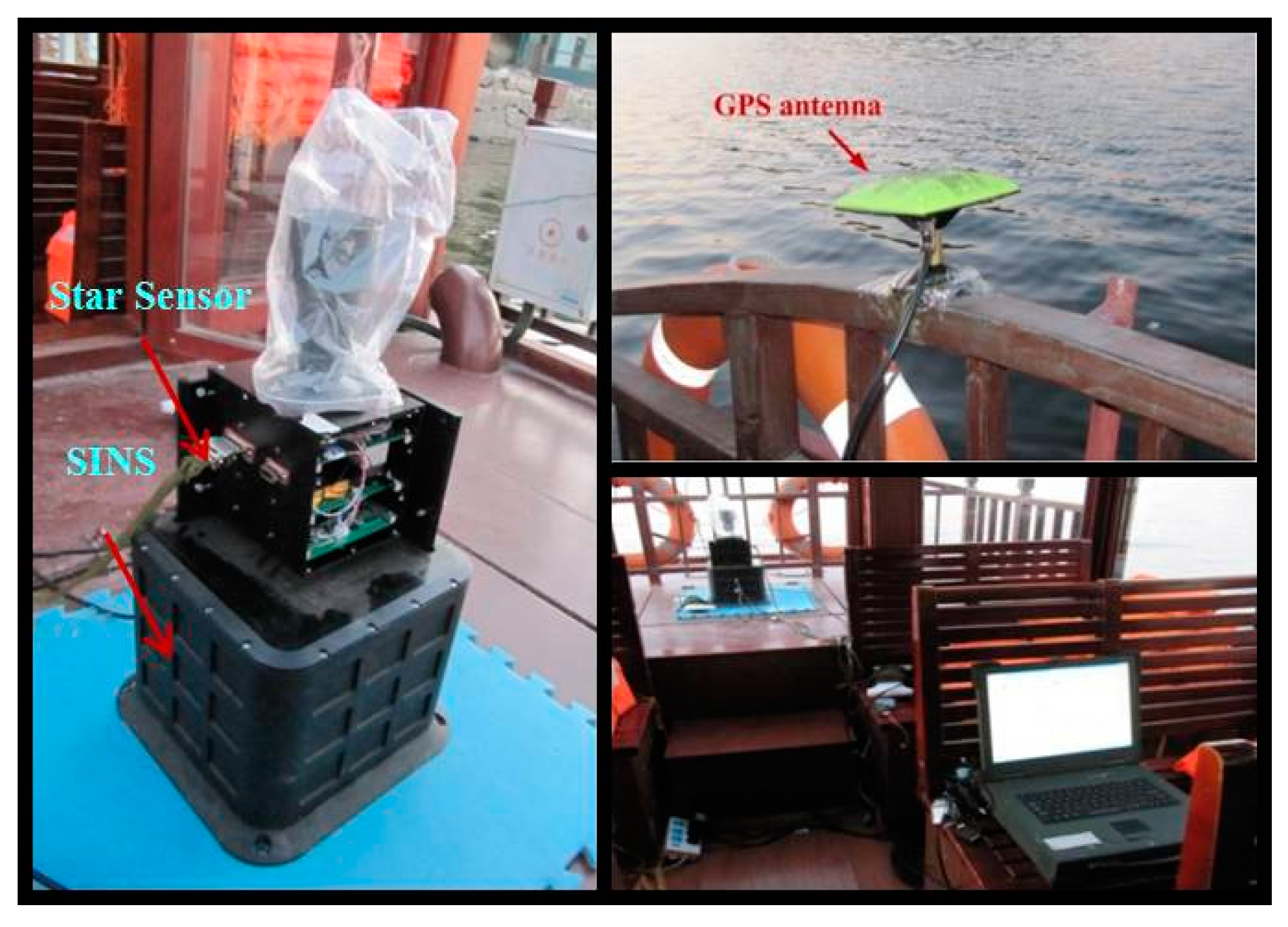
5.2.1. Experiment Conditions
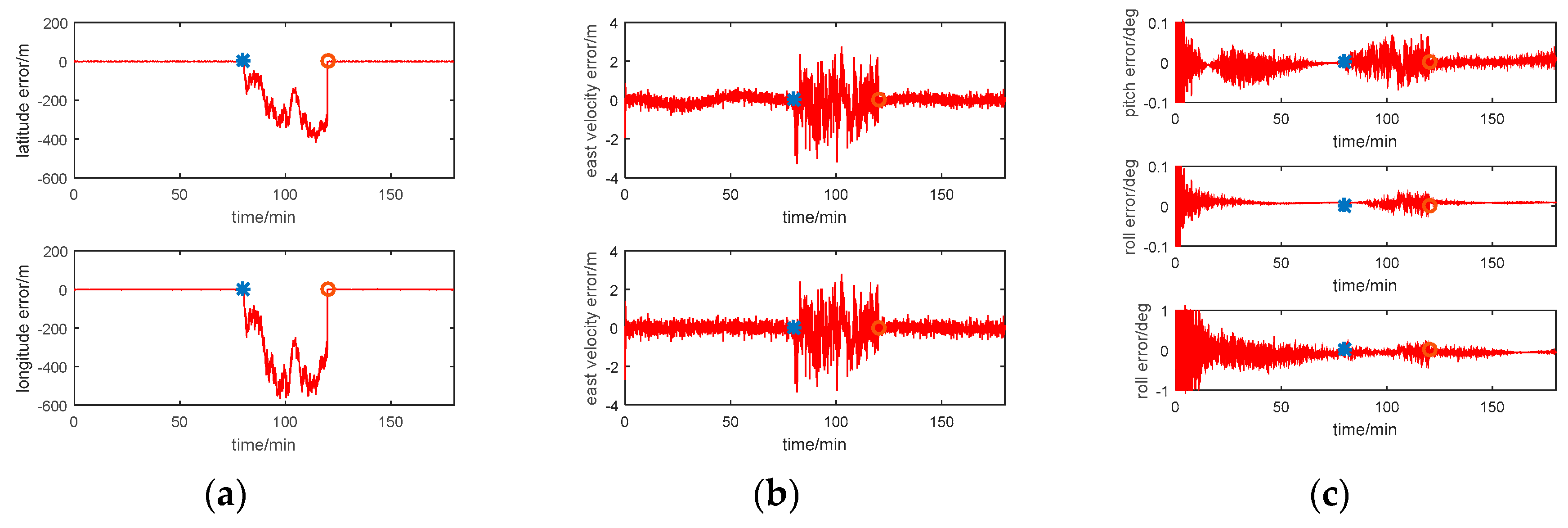
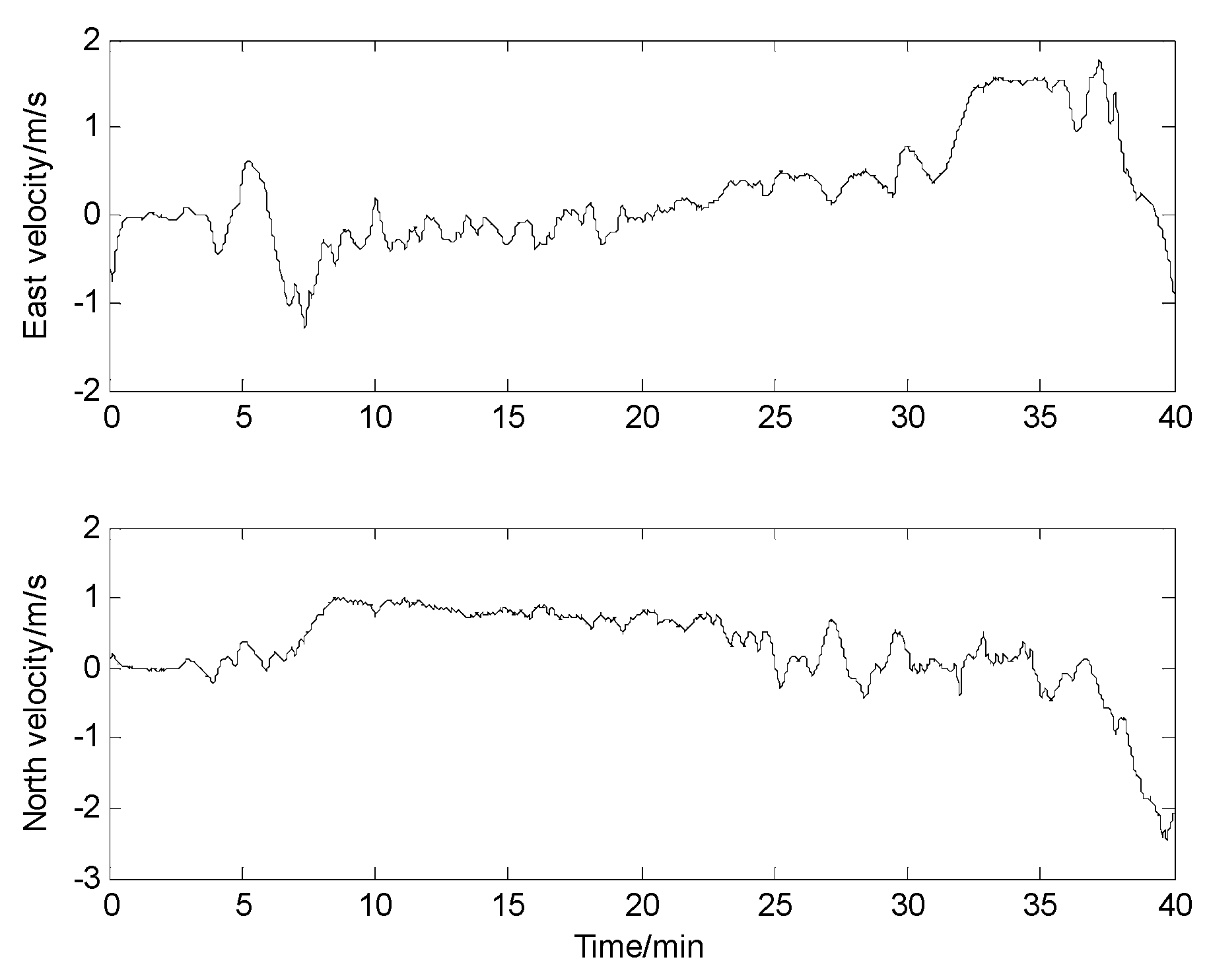
5.2.2. Experiment Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation with COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Bibuli, M.; Caccia, M.; Lapierre, L.; Bruzzone, G. Guidance of Unmanned Surface Vehicles: Experiments in Vehicle Following. IEEE. Robot. Autom. Mag. 2012, 19, 92–102. [Google Scholar] [CrossRef]
- Zhang, R.; Tang, P.; Su, Y.; Li, X.; Yang, G.; Shi, C. An adaptive obstacle avoidance algorithm for unmanned surface vehicle in complicated marine environments. IEEE/CAA J. Autom. Sin. 2014, 1, 385–396. [Google Scholar]
- Optical GPS. Available online: http://www.trexenterprises.com (accessed on 12 February 2014).
- Benso, W.E.; DuPlessis, R.M. Effect of Shipboard Inertial Navigation System Position and Azimuth Errors on Sea-Launched Missile Radial Miss. IEEE Trans. Mil. Electron. 1963, 7, 45–56. [Google Scholar] [CrossRef]
- Sun, C.; Deng, Z. Transfer alignment of shipborne inertial-guided weapon systems. Syst. Eng. Electron. J. 2009, 20, 348–353. [Google Scholar]
- Asada, A.; Ura, T. Three dimensional synthetic and real aperture sonar technologies with Doppler velocity log and small fiber optic gyrocompass for autonomous underwater vehicle. In Proceedings of the Oceans 2012, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–5.
- Denbigh, P.N. Ship velocity determination by Doppler and correlation techniques. Proc. IEEE Proc. F. Commun. Radar Signal 1984, 131, 315–326. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, H.; Wu, M.; Hu, X.; Hu, D. Observability of Strapdown INS Alignment: A Global Perspective. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 78–102. [Google Scholar]
- Akeila, E.; Salcic, Z.; Swain, A. Reducing Low-Cost INS Error Accumulation in Distance Estimation Using Self-Resetting. IEEE Trans. Instrum. Meas. 2014, 63, 177–184. [Google Scholar] [CrossRef]
- Hegrenaes, O.; Hallingstad, O. Model-Aided INS with Sea Current Estimation for Robust Underwater Navigation. IEEE. Ocean. Eng. 2011, 36, 316–337. [Google Scholar] [CrossRef]
- Won, D.H.; Lee, E.; Heo, M.; Lee, S.-W.; Lee, J.; Kim, J.; Sung, S.; Lee, Y.J. Selective Integration of GNSS, Vision Sensor, and INS Using Weighted DOP Under GNSS-Challenged Environments. IEEE Trans. Instrum. Meas. 2014, 63, 2288–2298. [Google Scholar] [CrossRef]
- Qin, H.; Cong, L.; Sun, X. Accuracy improvement of GPS/MEMS-INS integrated navigation system during GPS signal outage for land vehicle navigation. Electron. J. Syst. Eng. 2012, 23, 256–264. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multi-Sensor Integrated Navigation Systems; Artech House Publishers: Norwood, MA, USA, 2007. [Google Scholar]
- Gao, W.; Nie, Q.; Zai, G.; Jia, H. Gyroscope Drift Estimation in Tightly-coupled INS/GPS Navigation System. In Proceedings of the ICIEA 2007 2nd IEEE Conference on Industrial Electronics and Applications, Harbin, China, 23–25 May 2007; pp. 391–396.
- Kim, K.H.; Lee, J.G.; Park, C.G. Adaptive Two-Stage Extended Kalman Filter for a Fault-Tolerant INS-GPS Loosely Coupled System. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 125–137. [Google Scholar]
- Fang, J.; Gong, X. Predictive Iterated Kalman Filter for INS/GPS Integration and Its Application to SAR Motion Compensation. IEEE Trans. Instrum. Meas. 2010, 59, 909–915. [Google Scholar] [CrossRef]
- Myeong-Jong, Y. INS/GPS Integration System using Adaptive Filter for Estimating Measurement Noise Variance. Syst. IEEE Trans. Aerosp. Electron. 2012, 48, 1786–1792. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance Enhancement of MEMS-Based INS/GPS Integration for Low-Cost Navigation Applications. IEEE Trans. Veh. Technol. 2009, 58, 1077–1096. [Google Scholar] [CrossRef]
- Kerczewski, R.J. CNS architectures and systems research and development for the National Airspace System. In Proceedings of the 2004 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2004; p. 1643.
- Liu, J.; Ma, J.; Tian, J. Pulsar/CNS integrated navigation based on federated UKF. J. Syst. Eng. Electron. 2010, 21, 675–681. [Google Scholar] [CrossRef]
- Hu, H.; Huang, X. SINS/CNS/GPS integrated navigation algorithm based on UKF. J. Syst. Eng. Electron. 2010, 21, 102–109. [Google Scholar] [CrossRef]
- Wu, W.; Ning, X.; Liu, L. New celestial assisted INS initial alignment method for lunar explorer. J. Syst. Eng. Electron. 2013, 24, 108–117. [Google Scholar] [CrossRef]
- Gul, F.; Fang, J. Correction technique for velocity and position error of inertial navigation system by celestial observations. In Proceedings of the IEEE Symposium on Emerging Technologies, Islamabad, Pakistan, 17–18 September 2005; pp. 7–12.
- Star Sensor. Available online: http://www.es.northropgrumman.com (accessed on 25 July 2012).
- Sodern: SED36 Star Tracker. Available online: http://www.sodern.fr/site/docs_wsw/fichiers_sodern/SPACE%20EQUIPMENT/FICHES%20DOCUMENTS/SED36.pdf (accessed on 1 August 2010).
- Fei, X.; Ying, D.; Zheng, Y.; Zhou, Q. APS star tracker and attitude estimation. In Proceedings of the 1st International Symposium on Systems and Control in Aerospace and Astronautics (ISSCAA 2006), Harbin, China, 19–21 January 2006; pp. 19–21.
- Kazemi, L.; Enright, J.; Dzamba, T. Improving star tracker centroiding performance in dynamic imaging conditions. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 May 2015; pp. 1–8.
- Zhang, C.; Wang, G. Transfer alignment in strapdown inertial navigation system using CCD star tracker. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–5.
- Rudolph, D.; Wilson, T.A. Doppler Velocity Log theory and preliminary considerations for design and construction. In Proceedings of the IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 15–18.
- Lee, P.M.; Jeon, B.H.; Kim, S.M.; Choi, H.T.; Lee, C.M.; Aoki, T.; Hyakudome, T. An integrated navigation system for autonomous underwater vehicles with two range sonars, inertial sensors and Doppler velocity log. In Proceedings of the OCEANS ‘04. MTTS/IEEE TECHNO-OCEAN ’04, Kobe, Japan, 9–12 November 2004; Volume 3, pp. 1586–1593.
- Snyder, J. Doppler Velocity Log (DVL) navigation for observation-class ROVs. Oceans 2010, 1, 20–23. [Google Scholar]
- Lee, P.-M.; Jun, B.-H.; Kim, K.; Lee, J.; Aoki, T.; Hyakudome, T. Simulation of an Inertial Acoustic Navigation System With Range Aiding for an Autonomous Underwater Vehicle. IEEE J. Ocean. Eng. 2007, 32, 327–345. [Google Scholar] [CrossRef]
- Brokloff, N.A. Matrix algorithm for Doppler sonar navigation. In Proceedings of the Oceans Engineering for Today’s Technology and Tomorrow’s Preservation, Brest, France, 13–16 September 1994; Volume 3, pp. 13–16.
- Kinsey, J.C.; Whitcomb, L.L. Preliminary field experience with the DVLNAV integrated navigation system for oceanographic submersibles. Control Eng. Pract. 1991, 29, 97–104. [Google Scholar]
- Kinsey, J.C.; Whitcomb, L.L. In situ alignment calibration of attitude and Doppler sensors for precision underwater vehicle navigation: Theory and experiment. J. Ocean. Eng. 2007, 32, 286–299. [Google Scholar] [CrossRef]
- Troni, G.; Whitcomb, L.L. Advances in In Situ Alignment Calibration of Doppler and High/Low-end Attitude Sensors for Underwater Vehicle Navigation: Theory and Experimental Evaluation. J. Field Robot. 2015, 32, 655–674. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Whitcomb, L.L. Adaptive Identification on the Group of Rigid-Body Rotations and its Application to Underwater Vehicle Navigation. IEEE Trans. Robot. 2007, 23, 124–136. [Google Scholar] [CrossRef]
- Munchou, A. Performance and Calibration of an Acoustic Doppler Current Profiler Tower blow the surface. J. Atmos. Ocean. Technol. 1995, 12, 435–444. [Google Scholar] [CrossRef]
- Carlson, N.A. Federated square root filter for decentralized parallel processors. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 517–525. [Google Scholar] [CrossRef]
- Cong, L.; Qin, H.; Tan, Z. Intelligent fault-tolerant algorithm with two-stage and feedback for integrated navigation federated filtering. Syst. Eng. Electron. J. 2011, 22, 274–282. [Google Scholar] [CrossRef]
- Edelmayer, A.; Miranda, M.; Nebehaj, V. Cooperative federated filtering approach for enhanced position estimation and sensor fault tolerance in ad-hoc vehicle networks. Intell. Transp. Syst. IET 2010, 4, 82–92. [Google Scholar] [CrossRef]
- Ma, J.; Wang, M.; Wang, Z.; Thorp, J.S. Adaptive Damping Control of Inter-Area Oscillations Based on Federated Kalman Filter Using Wide Area Signals. IEEE Trans. Power Syst. 2013, 28, 1627–1635. [Google Scholar] [CrossRef]
- Zhang, H.; Lennox, B.; Goulding, P.R.; Wang, Y. Adaptive Information Sharing Factors in Federated Kalman Filtering. IFAC Proc. Vol. 2002, 35, 79–84. [Google Scholar] [CrossRef]
- Zhang, H.; Sang, H.; Shen, X. Adaptive Federated Kalman Filtering Attitude Estimation Algorithm for Double-FOV Star Sensor. J. Comput. Inform. Syst. 2010, 6, 3201–3208. [Google Scholar]
- Chang, L.; Li, J.; Chen, S. Initial Alignment by Attitude Estimation for Strapdown Inertial Navigation Systems. IEEE Trans. Instrum. Meas. 2015, 64, 784–794. [Google Scholar] [CrossRef]
- Chang, L.; Hu, B.; Li, A.; Qin, F. Strapdown inertial navigation system alignment based on marginalised unscented Kalman Filter. Sci. Meas. Technol. IET 2013, 7, 128–138. [Google Scholar] [CrossRef]
- Fang, J.C.; Wan, D.J. A fast initial alignment method for strapdown inertial navigation system on stationary base. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1501–1504. [Google Scholar] [CrossRef]
- Liebe, C.C. Accuracy performance of Star Trackers—A Tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Markley, F.L. Attitude determination using vector observations and the singular value decomposition. J. Astronaut. Sci. 1998, 36, 245–258. [Google Scholar]
- Münchow, A.; Munchow, A.; Coughran, C.S.; Hendershott, M.C.; Winant, C.D. Performance and calibration of an acoustic Doppler current profiler towed below the surface. J. Atmos. Ocean. Technol. 1995, 12, 435–444. [Google Scholar] [CrossRef]
- Stanway, M.J.; Kinsey, J.C. Rotation Identification in Geometric Algebra: Theory and Application to the Navigation of Underwater Robots in the Field. J. Field Robot. 2015, 32, 632–654. [Google Scholar] [CrossRef]
- Broatch, S.A.; Henley, A.J. An integrated navigation system manager using federated Kalman Filtering. In Proceedings of the IEEE 1991 National Aerospace and Electronics Conference, Dayton, OH, USA, 20–24 May 1991; pp. 422–426.
- Gao, W.; Fang, X.; Liu, F. Analysis on the influence of three-axis turntable nonorthogonal error on gyro calibration of SINS. In Proceedings of the 2012 International Conference on Mechatronics and Automation (ICMA), Chengdu, China, 5–8 August 2012; pp. 2429–2434.
- Krishnan, V.; Grobert, K. Initial alignment of a gimballess inertial navigation system. IEEE Trans. Autom. Control 1970, 15, 667–671. [Google Scholar] [CrossRef]
- Silson, P.M.G. Coarse Alignment of a Ship’s Strapdown Inertial Attitude Reference System Using Velocity Loci. IEEE Trans. Instrum. Meas. 2011, 60, 1930–1941. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | State | Value | Duration |
|---|---|---|---|
| 1 | Moving forward with constant speed | 5 m/s | 30 min |
| 2 | Acceleration motion with constant | 0.1 m/s2 | 10 s |
| 3 | Moving forward with constant speed | 6 m/s | 20 min |
| 4 | Left turning | 1°/s | 90 s |
| 5 | Moving forward with constant speed | 6 m/s | 10 min |
| 6 | Right turning | 1°/s | 90 s |
| 7 | Moving forward with constant speed | 6 m/s | 20 min |
| 8 | Left turning | 2°/s | 45 s |
| 9 | Moving forward with constant speed | 6 m/s | 10 min |
| 10 | Right turning | 1°/s | 45 s |
| 11 | Moving forward with constant speed | 6 m/s | 10 min |
| 12 | Decelerated motion with constant | 0.1 m/s2 | 10 s |
| 13 | Moving forward with constant speed | 5 m/s | 20 min |
| Parameter Item | Index | |
|---|---|---|
| Gyro | Dynamic Range | ±100 °/s |
| Bias Stability | ≤0.05 °/h | |
| Random Walk | ≤0.005 °/ | |
| Nonlinear Degree of Scale Factor | ≤20 ppm | |
| Accelerometers | Bias Stability | 100 μg |
| Nonlinear Degree of Scale Factor | ≤20 ppm | |
| Star Sensor | Field of view | 24° |
| Level of star observation | no less than +7 level | |
| Data update rate | 20 Hz | |
| Attitude accuracy | 5″ | |
| Dynamic Range | 20°/s | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Cui, X.; Li, Y.; Ye, F. Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter. Sensors 2017, 17, 239. https://doi.org/10.3390/s17020239
Wang Q, Cui X, Li Y, Ye F. Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter. Sensors. 2017; 17(2):239. https://doi.org/10.3390/s17020239
Chicago/Turabian StyleWang, Qiuying, Xufei Cui, Yibing Li, and Fang Ye. 2017. "Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter" Sensors 17, no. 2: 239. https://doi.org/10.3390/s17020239
APA StyleWang, Q., Cui, X., Li, Y., & Ye, F. (2017). Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter. Sensors, 17(2), 239. https://doi.org/10.3390/s17020239