
Topologically Optimized Nano-Positioning Stage Integrating with a Capacitive Comb Sensor





Abstract
:1. Introduction
2. Nano-Positioning Stage
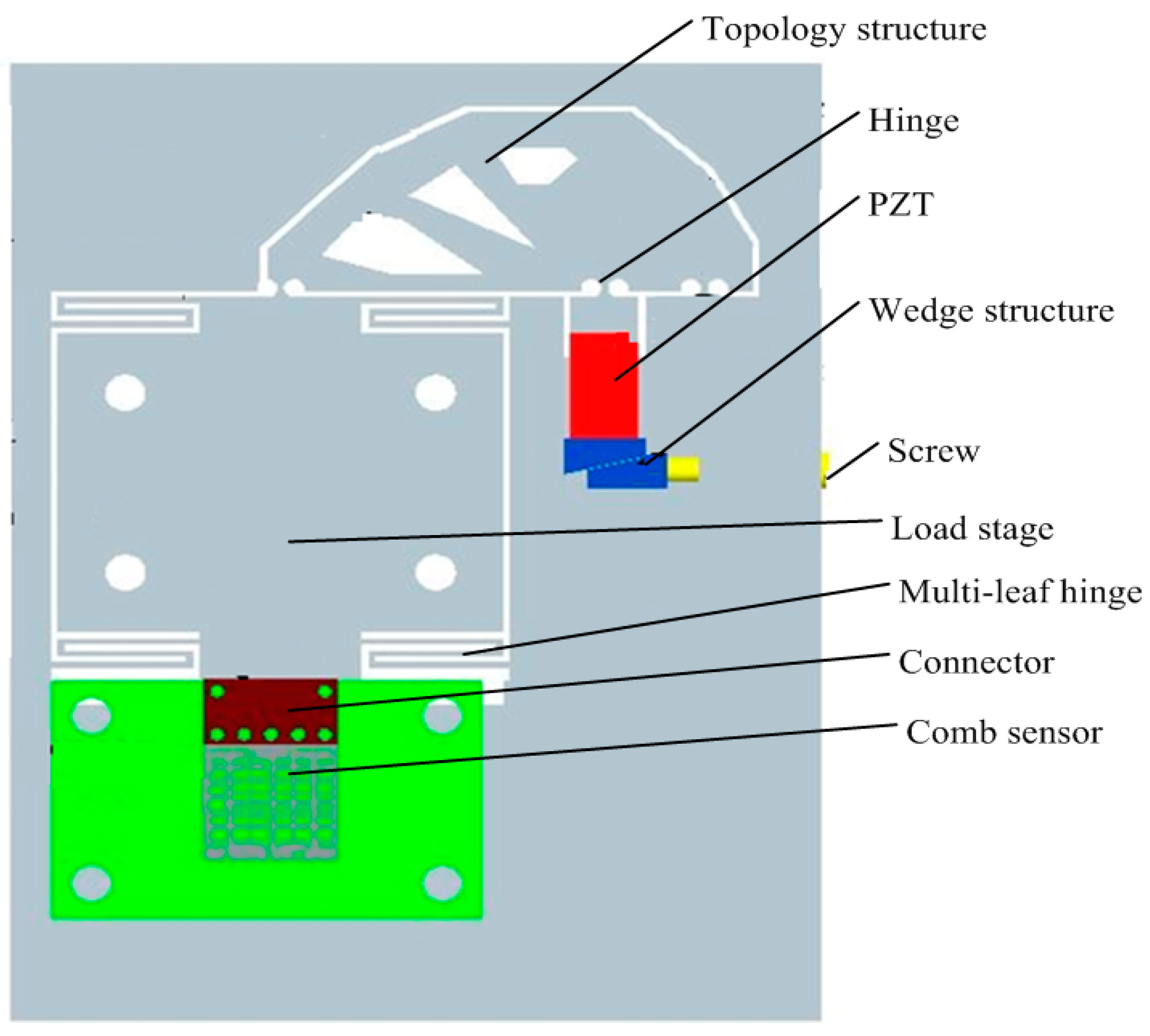
2.1. Device Configuration
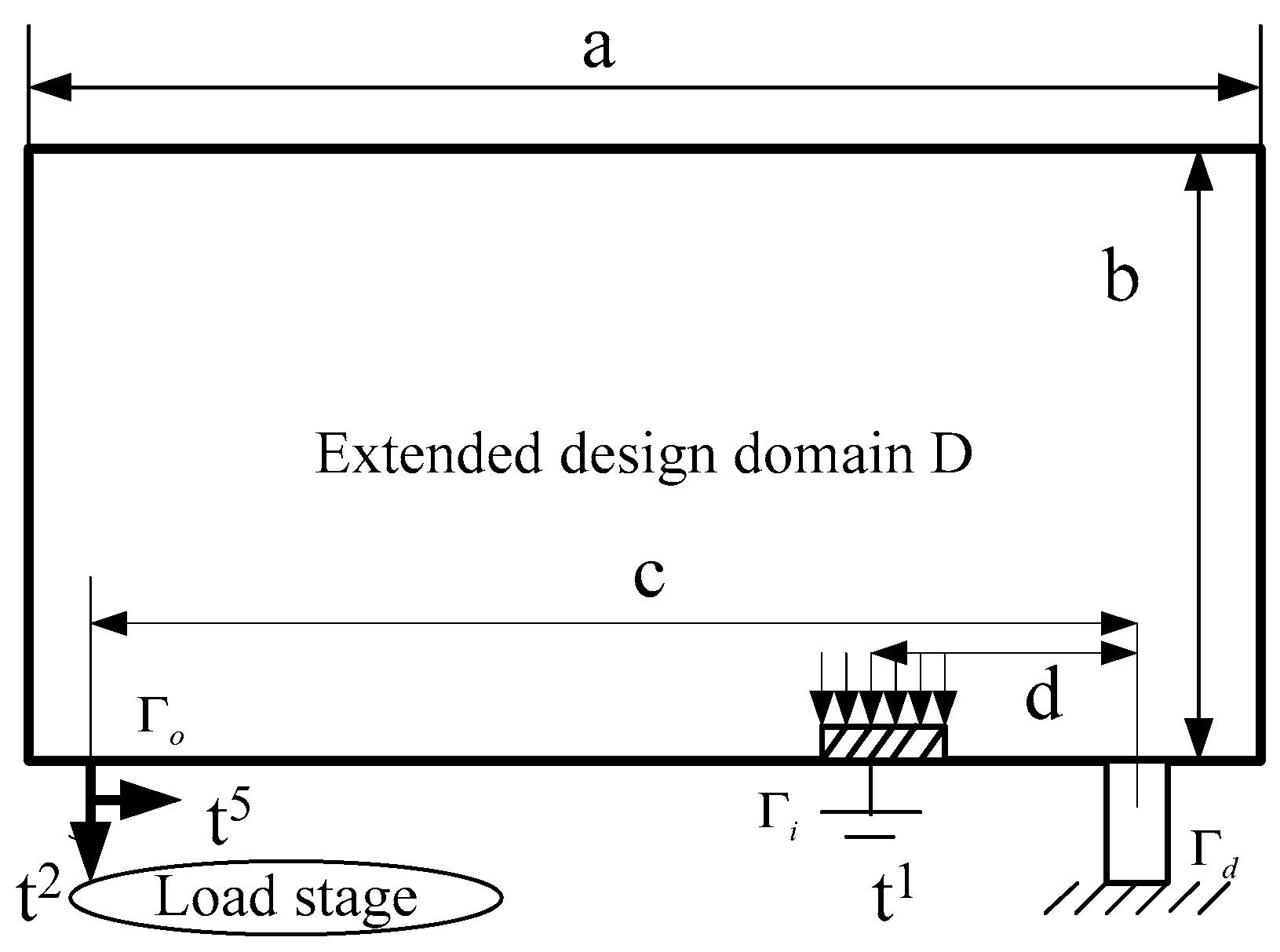
2.2. Modeling and Optimization
2.3. Simulation Analysis
- (1)
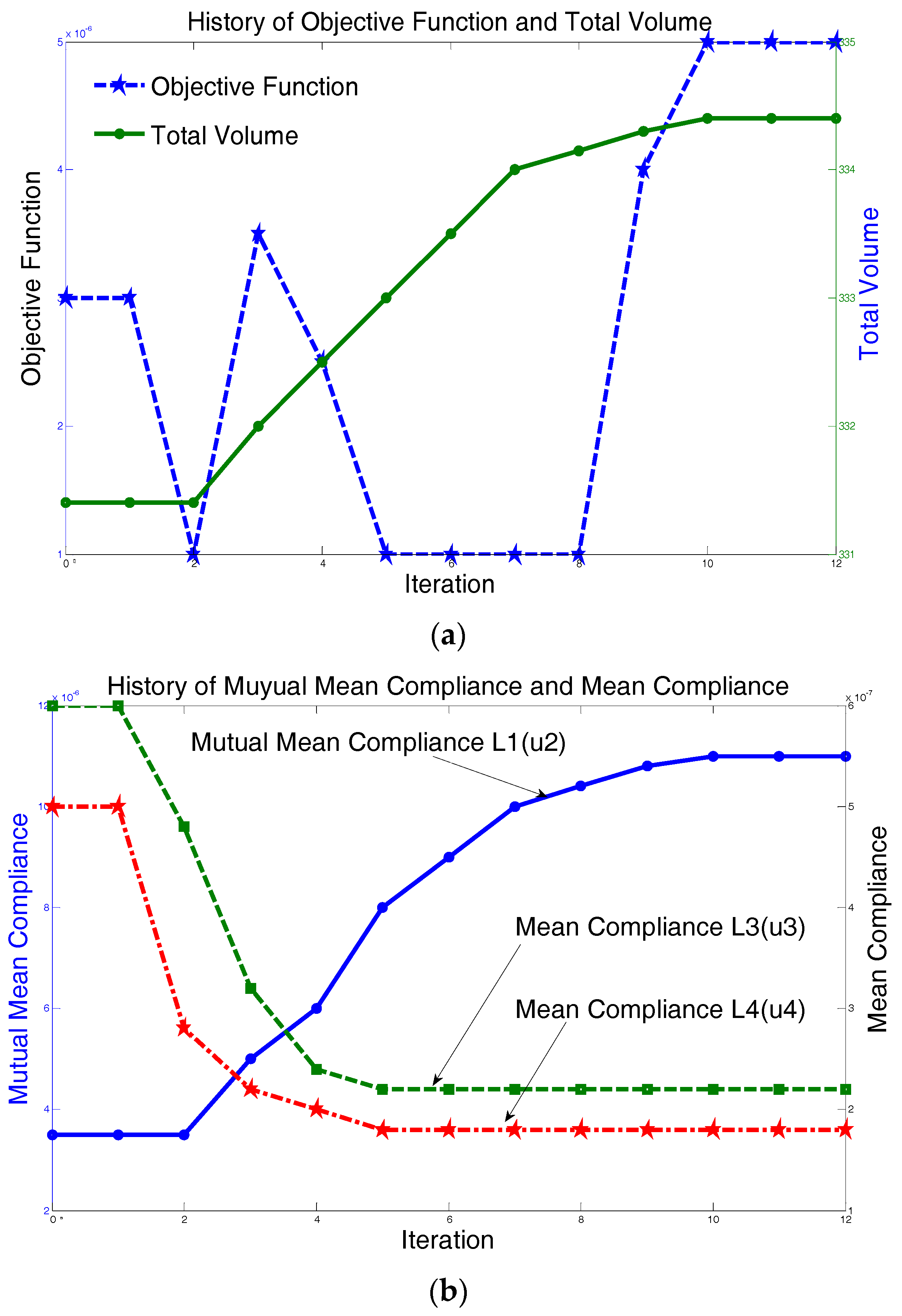
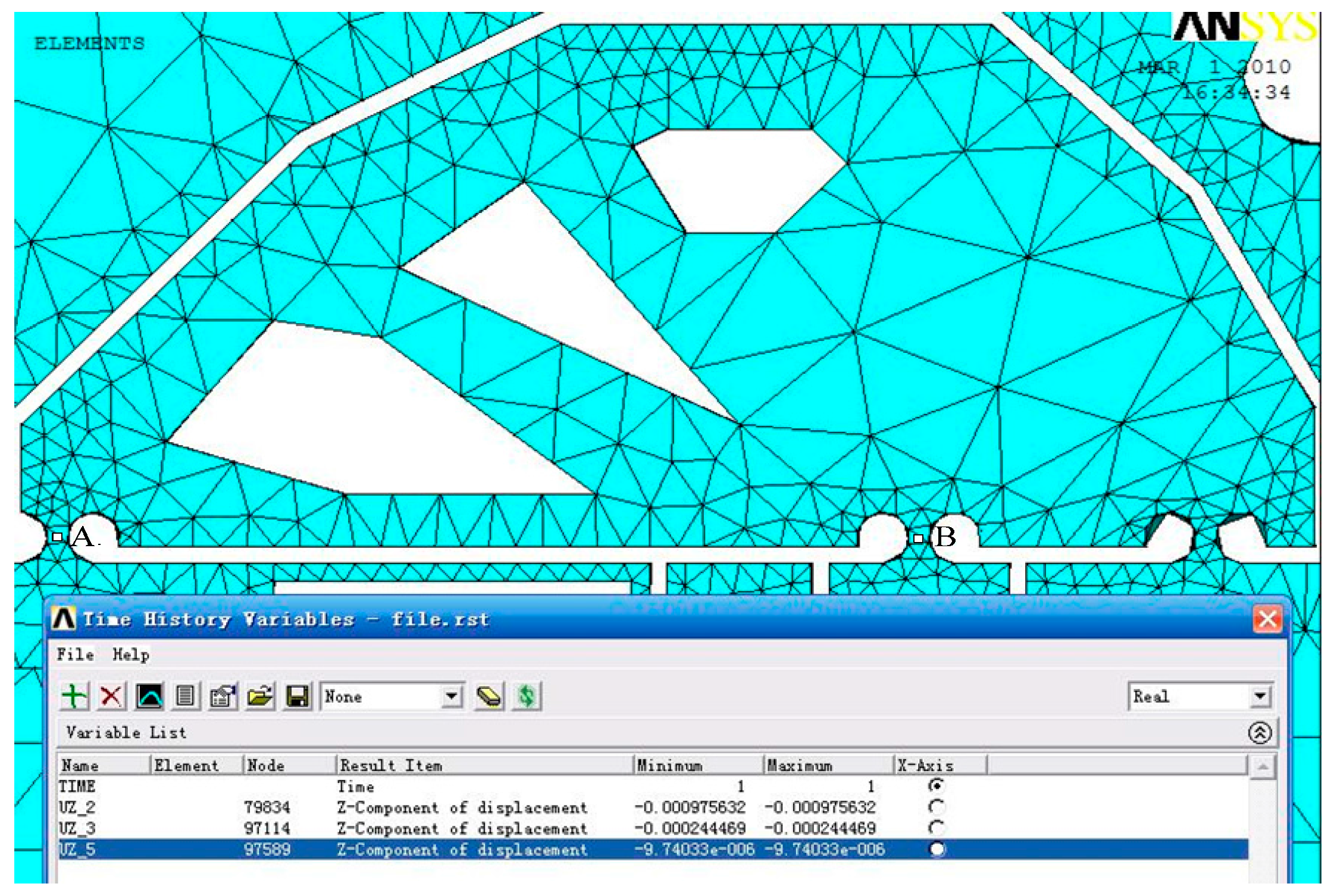
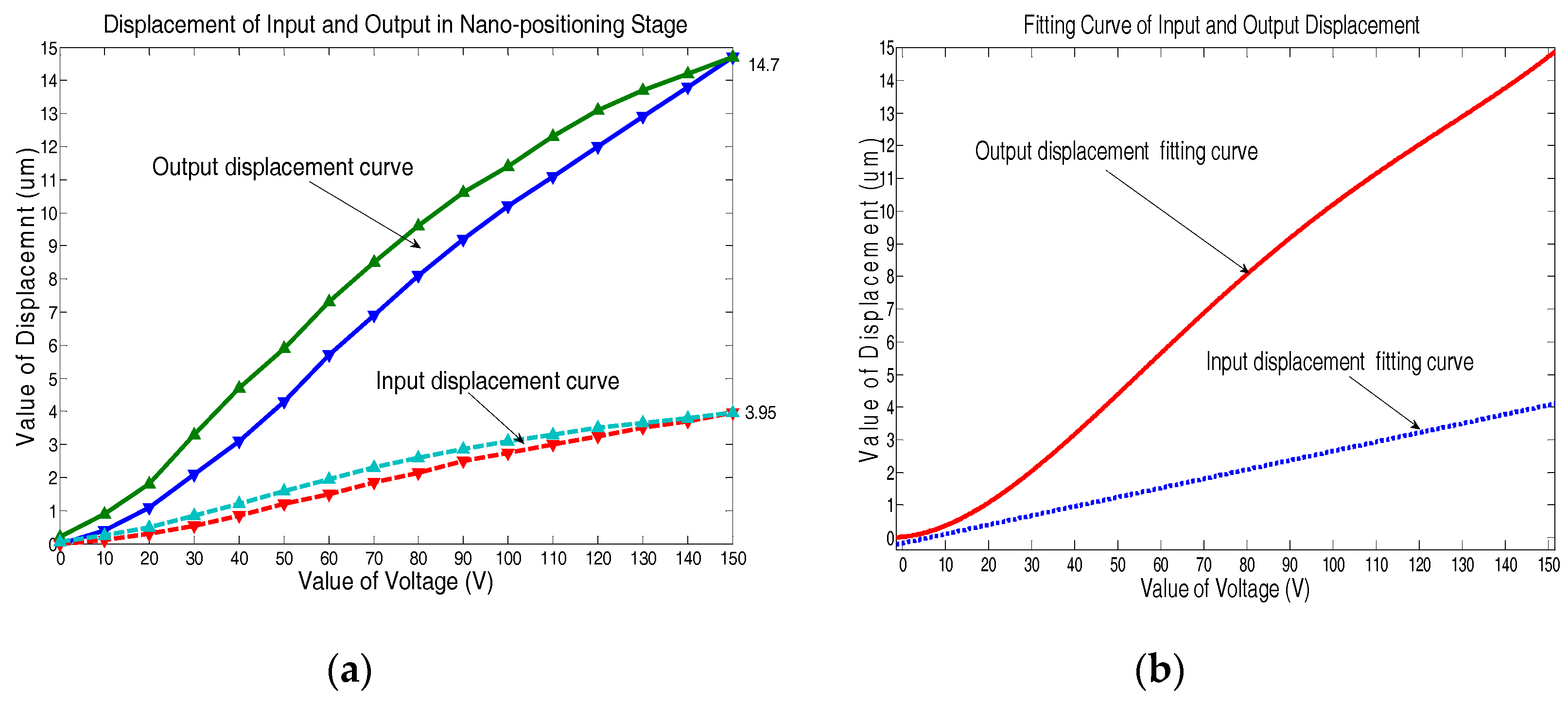
- Static analysis: On the basis of finite element modelling, static analysis is conducted and the input and output displacements of the hinges at points B and A are studied as shown in Figure 4. The input and output displacements of the points in the core of a circular hinges stand for the mean displacements of the nano-positioning stage. Through the multi-objective topology optimization, the maximum output displacement, amplification ratio, as well as the displacement damage in the PZT are calculated and summarized in Table 2. Compared with the traditional size optimization, it is found that the maximum output displacement and the amplify ratio of the topology design increase, while the input remains approximately the same level. As the goal displacement feed is obtained, the topology design can reduce the damage in PZT because of the reduction of reaction force.Besides the kinematics requirement, the structure requirement is considered in the multi-objective topology. The two mean compliances L(t3,u1) and L(t4,u2) at the input and output points remain sufficiently stiff. Based on the ANSYS simulation results as shown in Table 3, the reduction of the stress values can be clearly observed, that is, the stiffness of the input and output gain the increase. Meanwhile, the stiffness changes of the output and pivot are similar due to the mechanism principles. The vertical displacement of the goal direction is tested. It is found that a small coupling ratio is suitable for the goal requirement and propitious to expand the multi-dimensional stages with reduced cross coupling.
- (2)
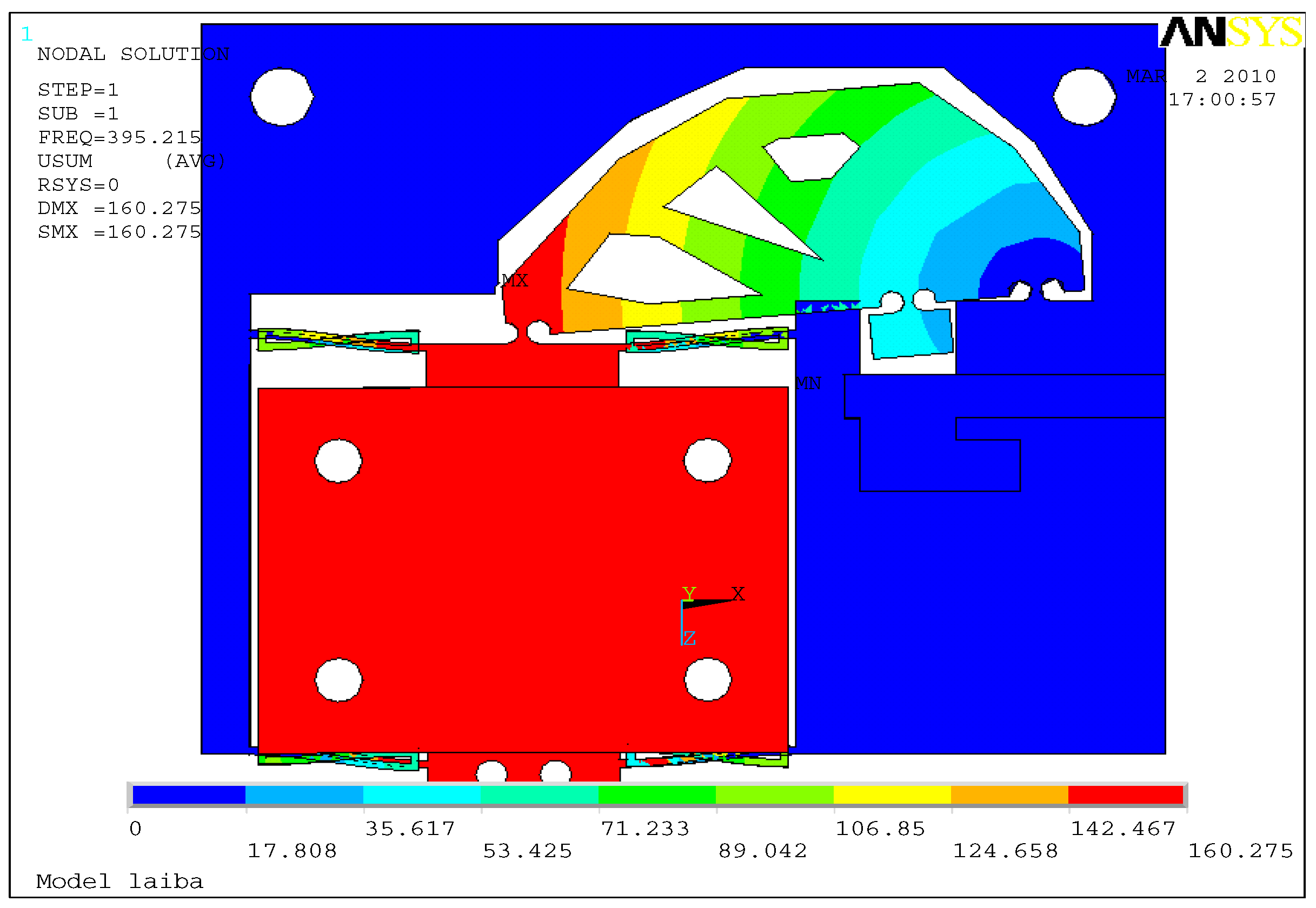
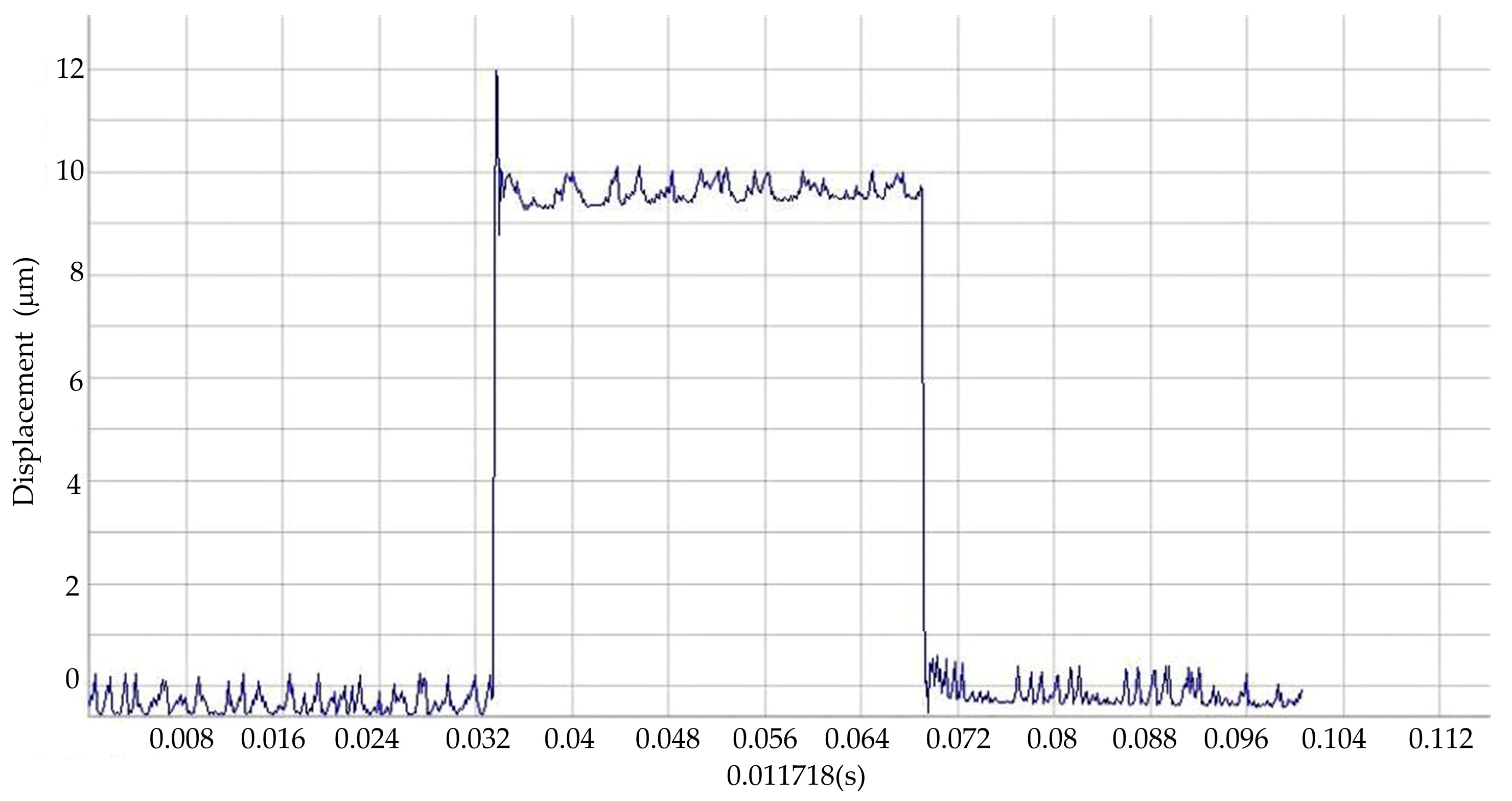
- Dynamic characteristics: The stability is dominated by the first resonance mode of the body structure, which is normally a bending mode. In order to obtain high stability, the nano-positioning stage must be designed to raise the frequency of the first resonance mode as high as possible. The mode analysis is performed as shown in Figure 5. The resonance frequency is found to increase from 391.7 to 470.3 Hz through the multi-objective topology optimization. The resonance response of the nano-positioning stage is studied. When the PZT starts or stops operating, because of the characteristics of the PZT ceramic itself, such as creep or hysteresis, the system will result in some frequency disturbance. For a traditional MPT-1JR micro-stage, the frequency response in the PZT ceramics is higher than the one in micro-stage, and oscillation will come up to make the entire system unstable. Through topology optimization, the frequency response can be effectively improved to avoid the emergence of such disturbance.
3. Capacitive Comb Sensor
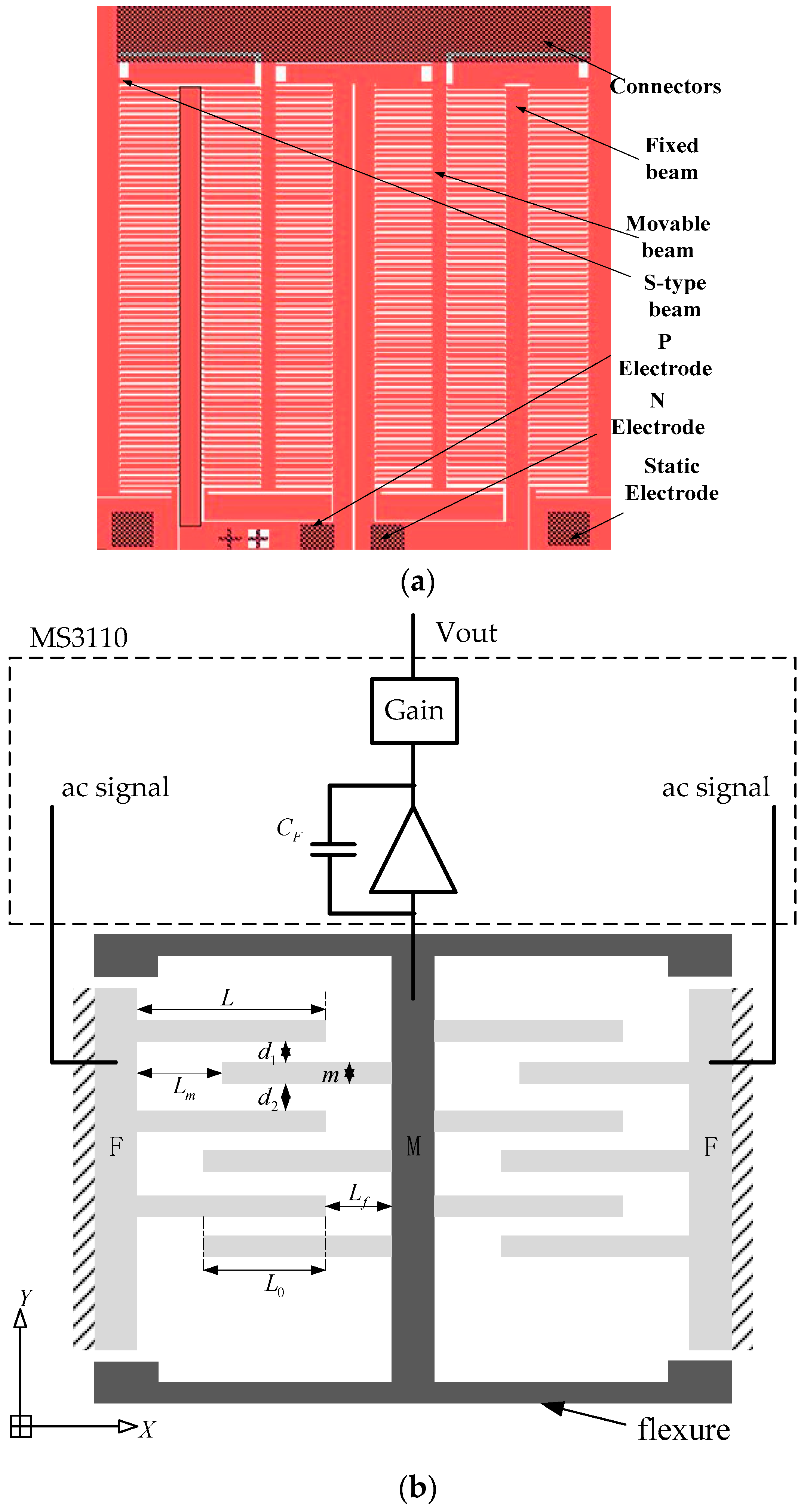
3.1. Structure Configuration
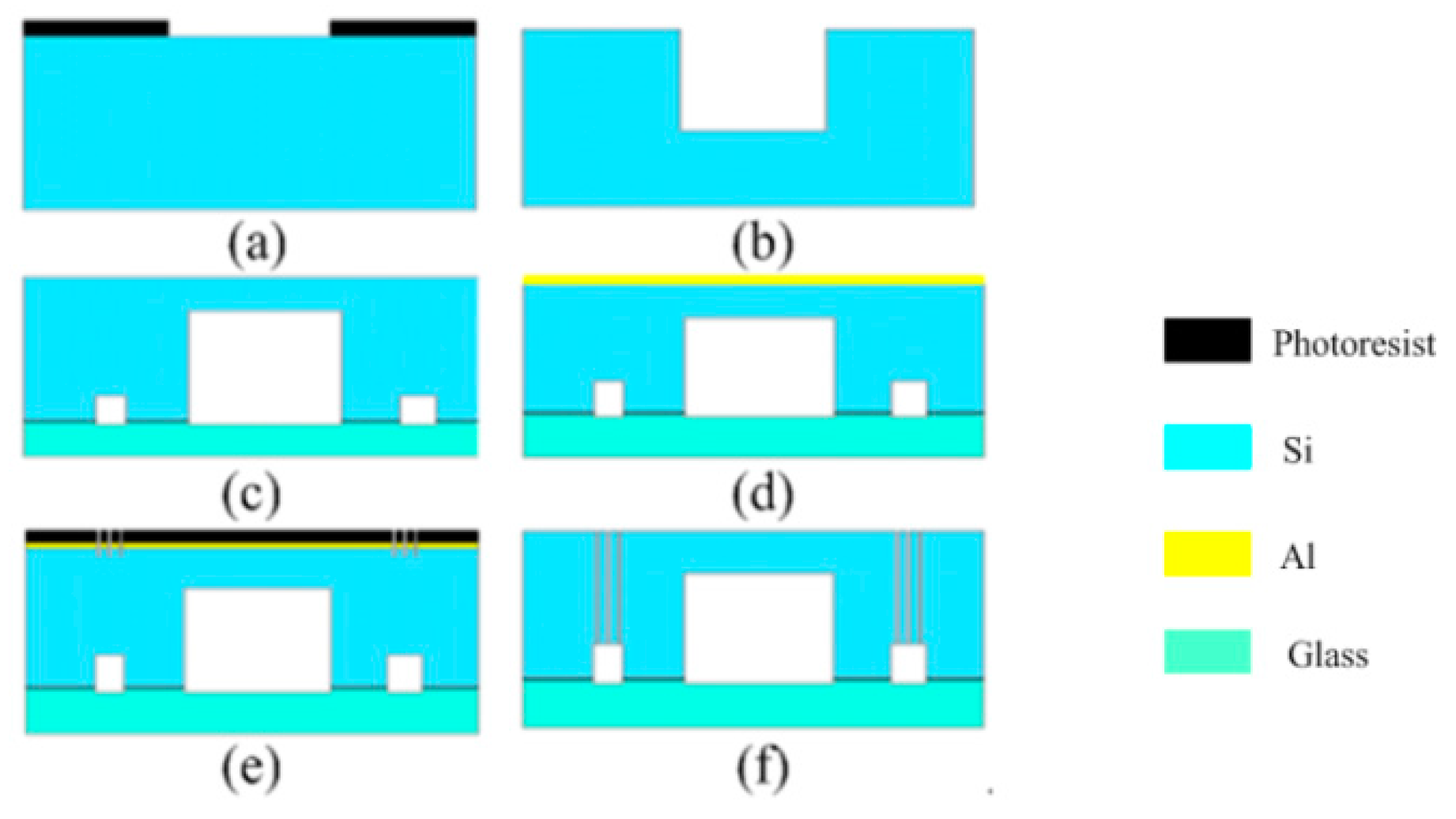
3.2. Manufacturing Process
4. Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, L.; Wang, J.; Rong, W.; Li, X.; Bao, H. A silicon integrated micro nano-positioning XY-stage for nano-manipulation. J. Micromech. Microeng. 2008, 18. [Google Scholar] [CrossRef]
- Hyde, H.C.; Sandtner, W.; Vargas, E.; Dagcan, A.T.; Robertson, J.L.; Roux, B.; Correa, A.M.; Bezanilla, F. Nano-positioning system for structural analysis of functional homomeric proteins in multiple conformations. Structure 2012, 20, 1629–1640. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.Y.; Ono, T. Piezoactuator-integrated monolithic micro-stage with six degrees of freedom. Sens. Actuators A Phys. 2005, 122, 301–306. [Google Scholar] [CrossRef]
- Zhang, Y.; Keum, H.; Park, K.; Bashir, R.; Kim, S. Micro-Masonry of MEMS Sensors and Actuators. J. Microelectromech. Syst. 2014, 23, 308–314. [Google Scholar] [CrossRef]
- Xu, Q.S. Design and Development of a Flexure-Based Dual-Stage Nanopositioning System with Minimum Interference Behavior. IEEE Trans. Autom. Sci. Eng. 2012, 9, 554–563. [Google Scholar] [CrossRef]
- Wadikhaye, S.P.; Yong, Y.K.; Bhikkaji, B.; Moheimani, S.O.R. Control of a piezoelectrically actuated high-speed serial-kinematic AFM nanopositioner. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Yong, Y.K.; Moheimani, S.O.R.; Kenton, B.J.; Leang, K.K. Invited Review Article: High-speed flexure-guided nanopositioning: Mechanical design and control issues. Rev. Sci. Instrum. 2012, 83. [Google Scholar] [CrossRef] [PubMed]
- Jain, C.; Saxena, A. An Improved Material-Mask Overlay Strategy for Topology Optimization of Structures and Compliant Mechanisms. J. Mech. Des. 2010, 132. [Google Scholar] [CrossRef]
- Perezzan, J.C.; Hernandez, S. Size and shape optimization of long portal bridges. Trans. Wessex Inst. 1999, 5, 287–300. [Google Scholar]
- Ansola, R.; Veguería, E. A simple evolutionary topology optimization procedure for compliant mechanism design. Finiteelem. Anal. Des. 2007, 44, 53–62. [Google Scholar] [CrossRef]
- Jong, C.; Chen, K.Y. An Integrated Design Optimization for Monolithic Mechanical Amplifier in PZT Nano-Positioning Stage. Tamkang J. Sci. Eng. 2010, 13, 165–172. [Google Scholar]
- Xu, Q.S. New Flexure Parallel-Kinematic Micropositioning System with Large Workspace. IEEE Trans. Robot. 2012, 28, 478–491. [Google Scholar] [CrossRef]
- Oda, K.; Terao, K.; Suzuki, T.; Takao, H.; Ishimaru, I.; Oohira, F. Vertical comb-drive MEMS mirror with sensing function for phase-shift device. Sens. Actuators A Phys. 2015, 181, 61–69. [Google Scholar] [CrossRef]
- Maroufi, M.; Bazaei, A.; Moheimani, S.O.R. A High-Bandwidth MEMS Nanopositioner for On-Chip AFM: Design, Characterization, and Control. IEEE Trans. Control Syst. Technol. 2015, 23, 504–512. [Google Scholar] [CrossRef]
- Xu, Q. Design, Fabrication, and Testing of an MEMS Microgripper with Dual-Axis Force Sensor. IEEE Sens. J. 2015, 15, 6017–6026. [Google Scholar] [CrossRef]
- Jang, I.G.; Kim, I.Y. Computational study of Wolff’s law with trabecular architecture in the human proximal femur using topology optimization. J. Biomech. 2008, 41, 2353–2361. [Google Scholar] [CrossRef] [PubMed]
- David, G.P. Sensitivity analysis of linear elastic systems using domain parameterization and a mixed mutual energy principle. Comput. Methods Appl. Mech. Eng. 1989, 77, 31–59. [Google Scholar]
- Teper, R. On the continuity of the concave integral. Fuzzy Sets Syst. 2009, 160, 1318–1326. [Google Scholar] [CrossRef]
- Kim, Y.S.; Yoo, J.M.; Yang, S.H.; Choi, Y.M.; Dagalakis, N.G.; Gupta, S.K. Design, fabrication and testing of a serial kinematic MEMS XY stage for multifinger manipulation. J. Micromech. Microeng. 2012, 22, 85029–85038. [Google Scholar] [CrossRef]
- Yong, Y.K.; Liu, K.; Moheimani, S.O.R. Reducing Cross-Coupling in a Compliant XY Nanopositioner for Fast and Accurate Raster Scanning. IEEE Trans. Control Syst. Technol. 2010, 18, 1172–1179. [Google Scholar] [CrossRef]
- Rueda, A.; Acosta, O.; Couprie, M.; Bourgeat, P.; Fripp, J.; Dowson, N.; Romero, E.; Salvado, O. Topology-corrected segmentation and local intensity estimates for improved partial volume classification of brain cortex in MRI. J. Neurosci. Methods 2010, 188, 305–315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eisert, P.; Rurainsky, J. Geometry-assisted image-based rendering for facial analysis and synthesis. Signal Process. Image Commun. 2006, 21, 493–505. [Google Scholar] [CrossRef]
- Choi, J.S.; Yamada, T.; Izui, K.; Nishiwaki, S.; Yoo, J. Topology optimization using a reaction–diffusion equation. Comput. Methods Appl. Mech. Eng. 2011, 200, 2407–2420. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight W | *L2(u1) | *L3(u3) | *L4(u4) |
|---|---|---|---|
| 0.3 | 130 | 1.0 | 0.5 |
| 0.5 | 150 | 1.3 | 1.0 |
| 0.7 | 190 | 2.0 | 1.5 |
| 0.9 | 500 | 50 | 12 |
| Traditional Optimization | Topology Optimization | Comparison (%) | |
|---|---|---|---|
| Output(μm/N) | 0.907 | 0.9756 | 5.4 |
| Input(μm/N) | 0.246 | 0.2445 | 2.0 |
| Amplify Ratio | 3.68 | 3.99 | 8.4 |
| Damage in PZT(nm/N) | 11.03 | 10.46 | −5.17 |
| (MPa/N) | Output | Input | Pivot |
|---|---|---|---|
| Original | 0.206 | 0.11 | 0.299 |
| Optimum | 0.16 | 0.037 | 0.23 |
| Reduction (%) | ↓22.3 | ↓66.4 | ↓23 |
| Parameters | Range |
|---|---|
| Thickness t | 200 μm |
| Width m | 15 μm |
| Gap d1 | 15 μm |
| Gap d2 | 50 μm |
| Length Ls | 10–15 μm |
| Overlap L0 | 880 μm |
| Voltage V | −8 V–8 V |
| Comb number n | 420 |
| P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 |
|---|---|---|---|---|---|---|---|---|---|
| 7.402 | 7.405 | 7.406 | 7.398 | 7.406 | 7.402 | 7.400 | 7.403 | 7.405 | 7.401 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, T.; Wang, Y.; Liu, H.; Yang, Z.; Wang, P.; Sun, L. Topologically Optimized Nano-Positioning Stage Integrating with a Capacitive Comb Sensor. Sensors 2017, 17, 257. https://doi.org/10.3390/s17020257
Chen T, Wang Y, Liu H, Yang Z, Wang P, Sun L. Topologically Optimized Nano-Positioning Stage Integrating with a Capacitive Comb Sensor. Sensors. 2017; 17(2):257. https://doi.org/10.3390/s17020257
Chicago/Turabian StyleChen, Tao, Yaqiong Wang, Huicong Liu, Zhan Yang, Pengbo Wang, and Lining Sun. 2017. "Topologically Optimized Nano-Positioning Stage Integrating with a Capacitive Comb Sensor" Sensors 17, no. 2: 257. https://doi.org/10.3390/s17020257
APA StyleChen, T., Wang, Y., Liu, H., Yang, Z., Wang, P., & Sun, L. (2017). Topologically Optimized Nano-Positioning Stage Integrating with a Capacitive Comb Sensor. Sensors, 17(2), 257. https://doi.org/10.3390/s17020257