1. Introduction
The application of global navigation satellite systems (GNSS) in harsh environments is drawing increasing attention among civilian users [
1]. As one of the world’s major navigation system, BDS is scheduled to be completed in 2020, and will eventually operate in ocean, urban, and indoor environments. To improve the capability for anti-narrowband interference and provide more precise ranging information, a secondary modulation of the NH code is introduced [
2,
3]. However, the periodicity of the transmitted sequence was broken by the NH codes, leading to more polarity changes, also known as bit transitions.
For typical receiver modules, the acquisition process occurs first and determines the sensitivity of a receiver [
4]. The maximum sensitivity gain is achievable by the integration of consecutive correlations of the received signal and the local code replica [
5]. The integration time becomes one of the main concerns that should be addressed in challenging environments affected by bit transitions, square loss, computational burden, and so on [
6].
Coherent combination (CC) is the most classical signal acquisition algorithm which can obtain the maximum signal-to-noise ratio (SNR), but the integration time is limited by bit transitions [
7]. In order to solve this problem, some improved CC algorithms are proposed. The half-bit alternation method that combines CC can be adopted to skip bit transitions [
8], and a block acquisition scheme using the CC method can also alleviate this effect [
9], meanwhile, a number of weighted signal blocks can be coherently accumulated to obtain an improved power [
10]. However, these algorithms based on the foundation that the probability of bit transitions is 5% for the global positioning system (GPS) L1 signal. However, the probability of bit transitions is 50% for the BDS B1 signal caused by the NH codes, which can significantly influence the aforementioned integration algorithms [
11,
12].
Apart from the CC method and its modified version, two other well-known techniques, namely, the non-coherent combination (NC) algorithm and the differential combination (DC) algorithm, are also applied in weak signal environments [
13,
14]. The NC algorithm mitigates the undesirable effect of polarity changes through a squaring operation, but has to suffer from square loss, which reduces the SNR [
15,
16]. The DC method is notable for multiplying the present integration result with the delay conjugate of the last one, which reduces the square loss and the effect of polarity changes to a certain extent, thereby making this method feasible in weak GPS signal processing [
17]. Different forms of detection schemes can be found in literature [
17,
18,
19].
Regardless of the calculation burden, bit transition is a major problem that hinders long integration time, it can degrade the probability of acquisition in terms of Galileo E1 OS, GPS L5, and GPS L1C signal in different degrees [
20], as well as the BDS B1 signal with a similar modulation. To achieve high frequency accuracy and acquisition probability in weak environments, an aiding Doppler information from strap-down inertial navigation system can be added into the acquisition process to reduce the search band of frequency. Meanwhile, the Viterbi algorithm is used for bit estimation to obtain a long differential integration time [
6]. To demodulate the NH code without aiding information, a search tree for secondary codes is proposed combined with the CC method [
21]; however, 2
20 combinations for 20 ms integration time will consume a very large amount of storage. Simply adopting a whole tiered code of pseudo-random noise (PRN) codes and NH codes as the local code for acquisition is an easier alternative [
22], however, conducting that many FFTs and inverse FFTs of a 20 ms sequence in each frequency unit is difficult. On the basis of the same principle, a modified CC method, that uses the top 5 ms NH chips with the same polarity as the local code, is utilized to acquire BDS signal [
23], but this technique requires 19 instances of redundant computation in each frequency unit.
In the above algorithms, FFT is used for transformation from the time domain to the frequency domain, or from the frequency domain to the time domain, to reduce the computation burden. Additionally, the basic function of FFT is to analyze the spectrum with a simplified search method, and the resolution of the spectrum is proportional to the length of the data [
24]. Based on the theory and the analysis of paper [
25], the present study derives a formula that shows exactly how bit transitions can bring in an error Doppler estimation, and related analysis is addressed. A frequency recalculation algorithm is proposed which exploits the efficiency of FFT-based algorithms, the start point of NH codes can be found, that is to say the symbol combination is found, and long integration time becomes possible. Meanwhile, a more accurate Doppler bins can be estimated. This result is helpful for speeding up the tracking process. The developed algorithm is analyzed in terms of cross-ambiguity function (CAF). Monte Carlo simulations are used to analysis the results, and the algorithms are demonstrated through real data.
The remainder of this paper is organized as follows:
Section 2 introduces the BDS signal model and reviews the acquisition process.
Section 3 analyzes the side effect of bit transitions on acquisition and derives a theoretical formula in the presence of bit transitions. In
Section 4, a FFT-based acquisition algorithm is proposed to get the fine frequency. In
Section 5 the different integration techniques are further analyzed and compared by means of Monte Carlo simulations and real data. Finally, conclusions are drawn in
Section 6.
2. Signal and System Model
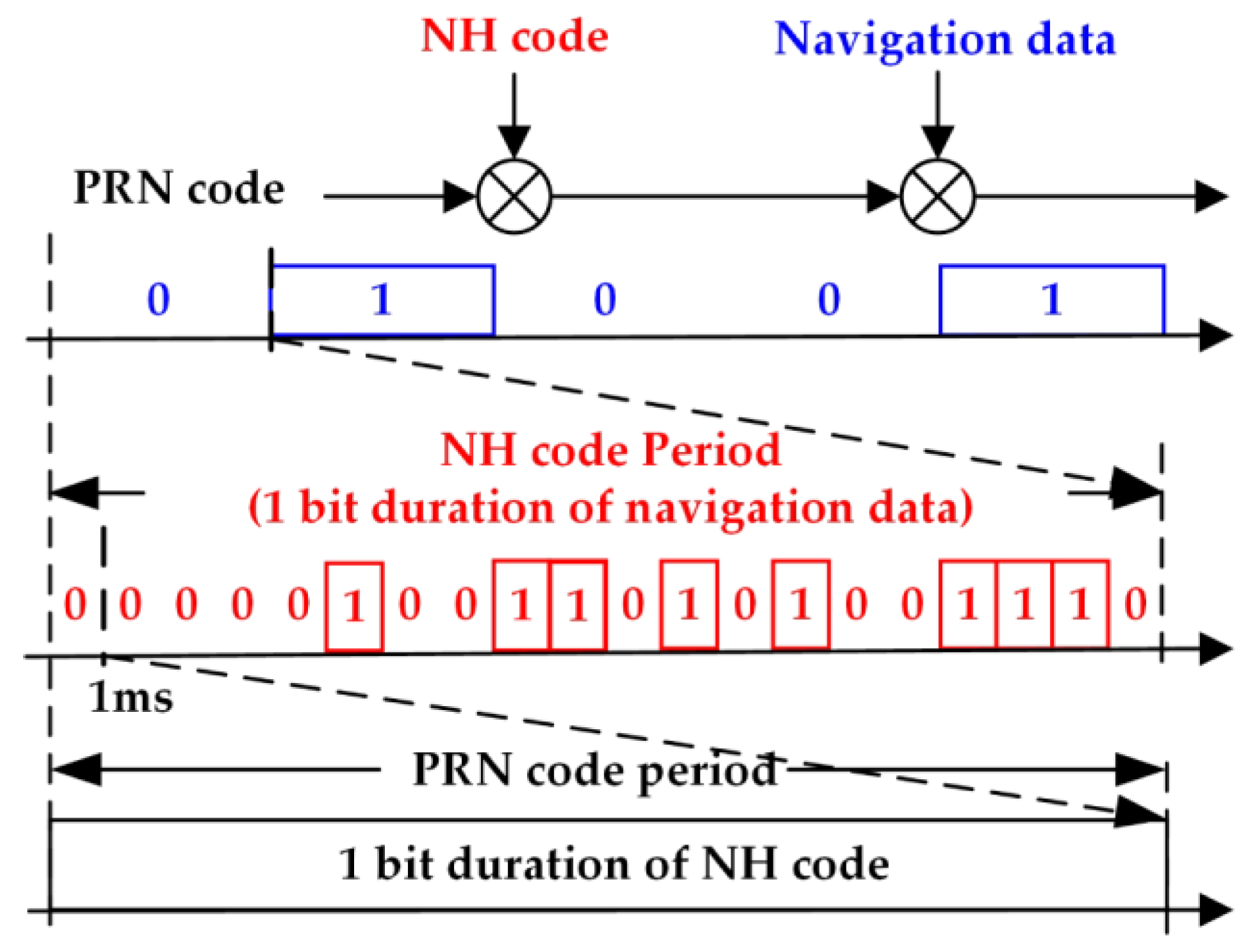
Unlike conventional GPS signals, BDS B1 signal adopts secondary codes modulation by the primary purpose of speeding up bit synchronization. Thus, the period of NH codes is 20 ms, corresponding to a navigation bit interval, besides, the secondary codes and the navigation bits are time aligned.
Figure 1 shows the structure of BDS B1 signal. The received signal of the B1 in-phase branch in a one-path additive white Gaussian noise channel can be modeled as [
26]:
where, superscript
k stands for satellite number depending on the modulated PRN code;
A is the amplitude; and
K is the number of visible satellites.
c,
d, and
s represent the PRN codes, the navigation data and the NH codes, respectively.
is the carrier frequency, while
,
, and
are the Doppler frequency, the delay and the carrier phase introduced when transmission.
is a stationary additive white Gaussian noise with variance
.
The received signal is filtered, down-converted, sampled at the frequency
, and then digitalized. Thus, the digital signal can be expressed as:
where
is the receiver intermediate frequency.
Owing to the quasi-orthogonality of the PRN codes, different signals can be analyzed separately. Thus, the following signal model can be adopted for simplification:
where the index
has been dropped, and
is introduced. It should be noted that the input signal of conventional GPS L1 signal has a similar form, but there are no secondary codes, that is, there is no
term.
The basic concept of signal acquisition is to obtain available satellite PRN numbers, estimated Doppler shifts, and code phases through correlation between signal of Equation (3) and the local duplicates, then a random variable
is produced, where,
and
stands for different carrier frequencies and delays to be tested. When the GPS L1 signal is present [
26]:
is the cross correlation between the input and the local code,
is number of samples, and
defines the coherent integration time in seconds,
is set to 0.001s.
is the frequency difference between the input and local signal, while
represents the difference between the input and local code delay, normalized by sampling interval
,
is the difference of phases between the input and local carriers,
is 1 or −1 that represents the navigation bits. Equation (4) is derived based on the assumption that the navigation bits will not reverse during the integration process. It is reasonable because there exists, at most, one bit transition in every 20 ms, though the one variable affected by bit transition is no longer in the same form with Equation (4), it hardly affect the final result. However, when it comes to the BDS B1 signal, the equation is not applicable, and the general Equation (4) must be revised attributing to the NH codes. The next section will derive a new variable that fits for the BDS B1 signal and a detailed analysis will be drawn.
3. Analysis of Bit Transitions
The CC acquisition is realized by averaging the in-phase (I) and quadrature (Q) components through correlation [
27]. The derivation of variable
can easily be found in the related literature, thus, part of the derivation in this paper is omitted. The same goes for the derivation of decision variable for GPS signals, the assumption that navigation bits will not reverse during the integration process is made. When the local code replica perfectly matches the input signal, that is
, the CC results can be expressed as:
Suppose that bit transitions occur in
(
), namely:
Considering that high frequency components can be mitigated by integration, then,
The two terms in Equation (7) are two truncated geometrical series, which can be summed easily as [
25]:
where
and
. When
,
can be rewritten as:
where,
, and
.
The Doppler frequency is within 10 kHz under the existing vehicle and satellite conditions [
28], whereas
is greater than twice the intermediate frequency (IF). That is,
, which denotes the ratio of the frequency error, and
, is extremely small, i.e., smaller than 0.0025. Thus,
can be replaced with
as follows:
Then, the decision variable of CC is determined as:
The NC technique is realized by summing the squared coherent correlation values. This method can be written as [
13]:
where
is the time of non-coherent integration. However, a famous square loss will be experienced because the noise is also squared [
15].
The DC method will be achieved via two consecutive coherent integration periods. The output can be presented as follows [
19]:
where
is the time of differential integration;
and
are the
nth output and the complex conjugate of the (
n−1)-th output, respectively.
In Equation (11),
and
will determine the position of the peak in the frequency bins.
will monotonically decrease to zero in
, in other words, the peak decreases as the frequency error increases in the range
Hz. However, when
is equal to zero,
is equal to zero too. That is to say, the peak is no longer consistent with the right Doppler bins. When
is equal to
, i.e., the frequency difference is equal to
Hz, a maximum of
will be achieved and
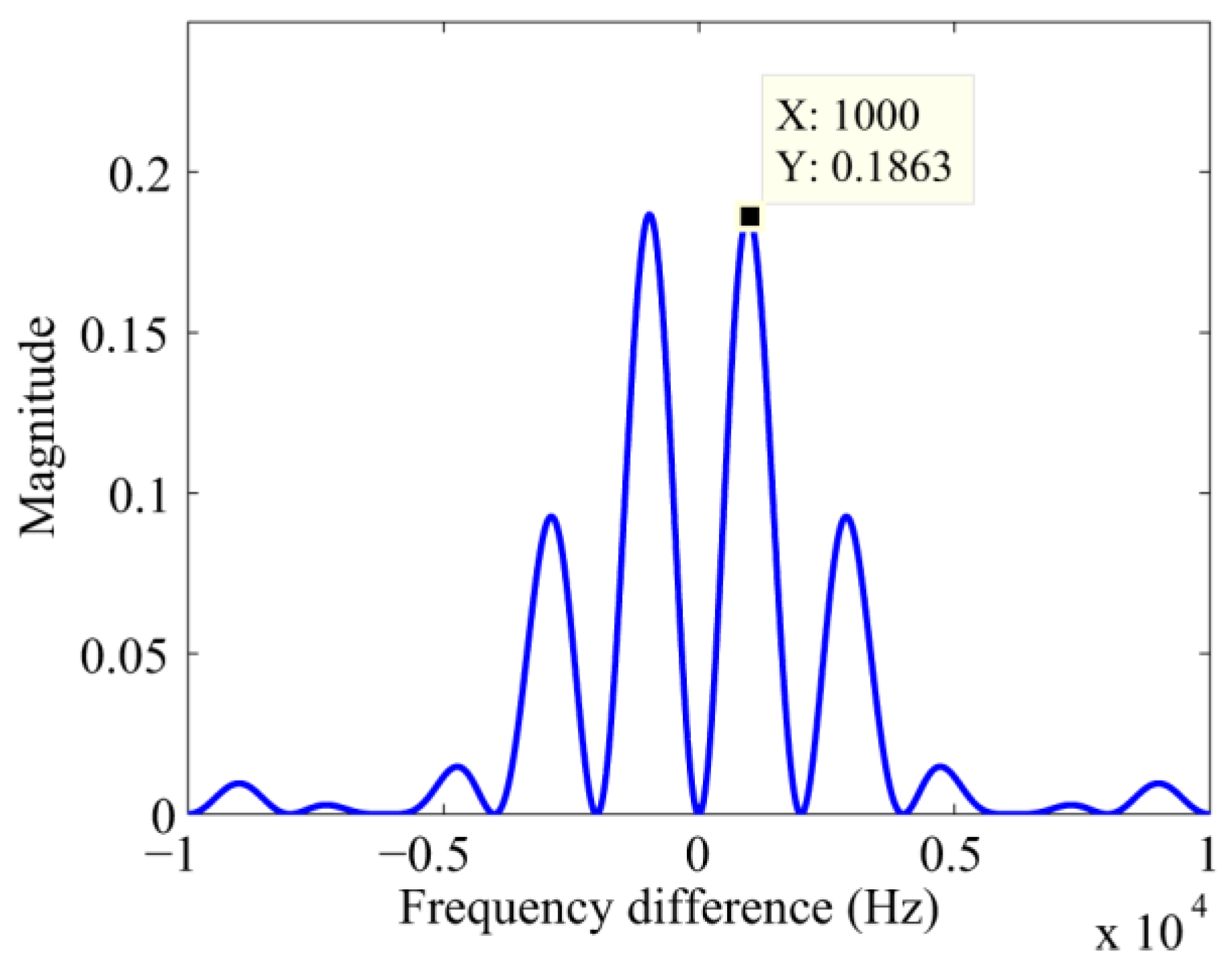
will reach its maximum, which will bring in a large frequency error. The curve of
is illustrated in
Figure 2.
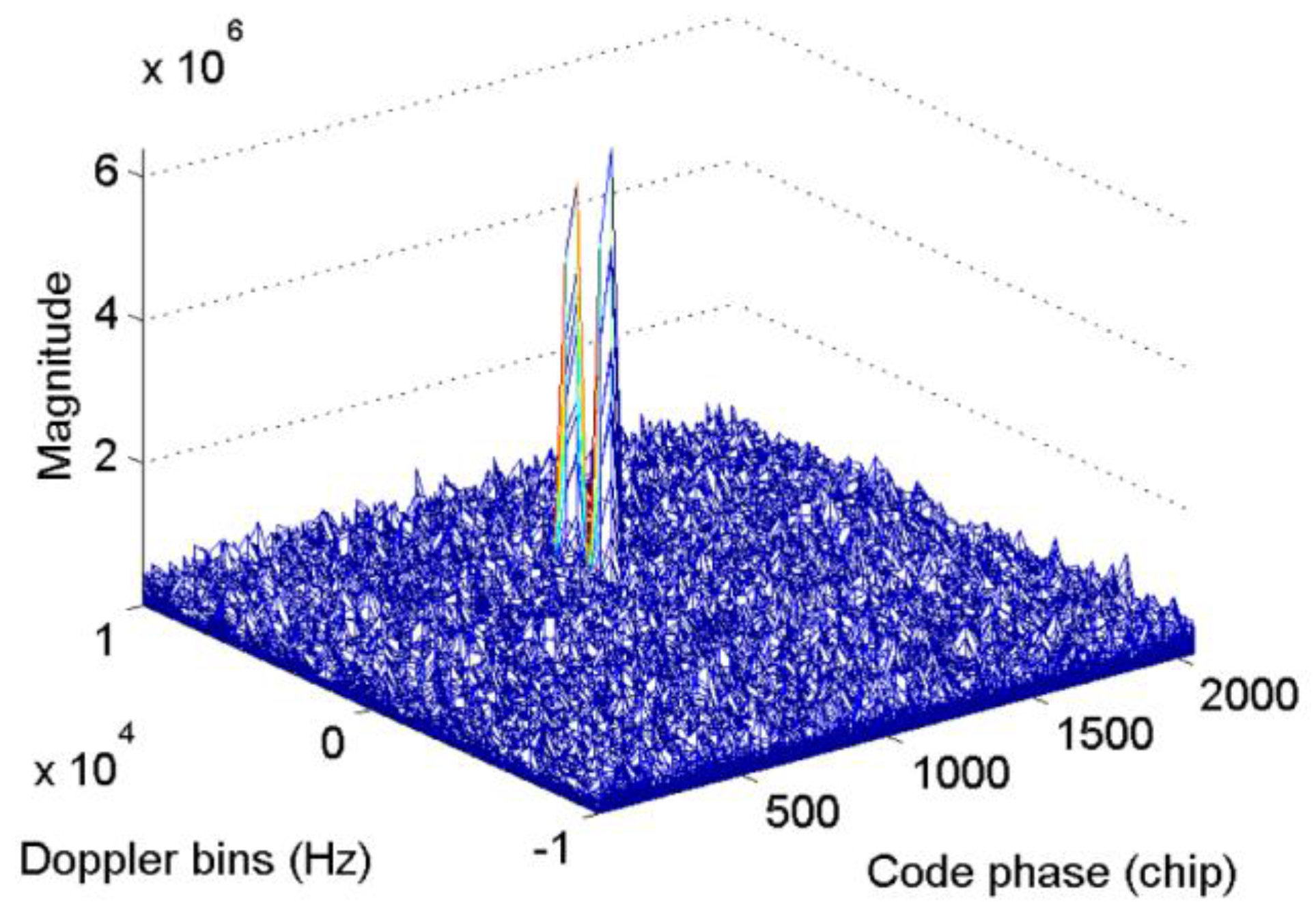
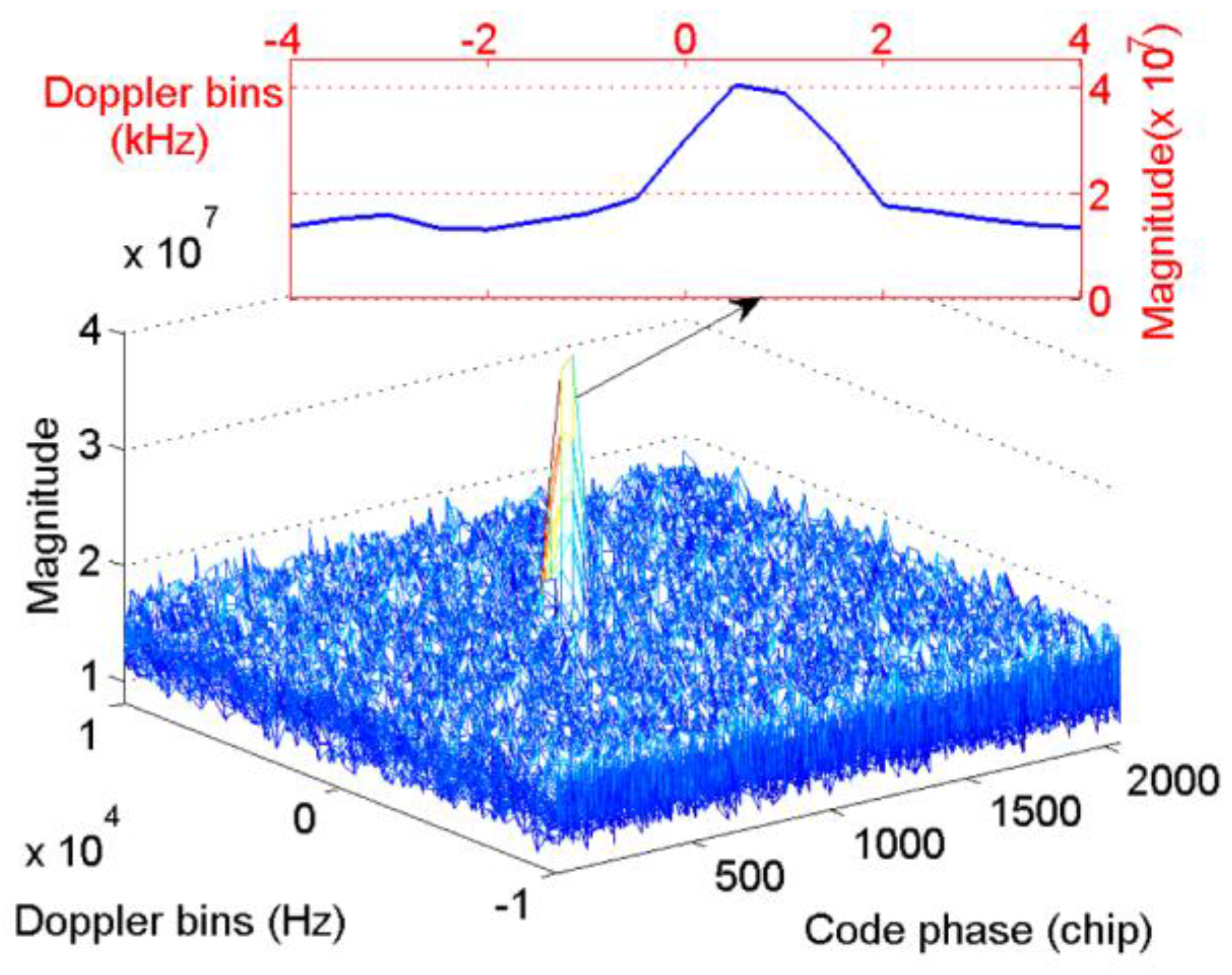
Figure 3 presents the acquisition results with simulated BDS signal of satellite 12 when
s,
MHz, and
MHz, thus,
, the code phase, and also
, is set as
. The starting point of the NH codes are set to 11 NH code chips, and the Doppler bins are set to 3000 Hz. The bin width of the frequency dimension and code dimension are 500 Hz and 0.5 chips, respectively, for the full paper. As shown in
Figure 3, when the integration process crosses bit transitions, the peak in the frequency axis splits into two components. The corresponding Doppler bins of the peak is 2500 Hz, which indicates a failed acquisition. Considering that the CC method serves as the base of the NC and DC methods, the outputs of CC are accumulated by means of square or delay conjugate multiplication to reduce the white Gaussian noise. However, such operations cannot eliminate the frequency error, and it will be transmitted to the final decision variable. Moreover, Equation (11) indicates that the code phase is still correct, except for a loss of amplitude. Consequently, a FFT-based frequency recalculation method is designed to mitigate the undesirable effect of bit transitions.
4. FFT Based Frequency Recalculation
Considering that the frequency of conventional acquisition algorithms deviates from the desired value because of the secondary codes, a more accurate frequency must be obtained. Generally, the frequency spectrum of a digital sine wave can be obtained via discrete Fourier transform, and the revolution of the spectrum is proportional to the ratio of the sampling frequency and the samples. To apply the theory to GNSS signal acquisition, the PRN codes, NH codes, and navigation bits must be demodulated from the received signal to obtain the spectrum of the carrier. The code phase estimated from conventional acquisition algorithms can be used to remove the PRN code. Thus, there remains the NH codes and navigation bits.
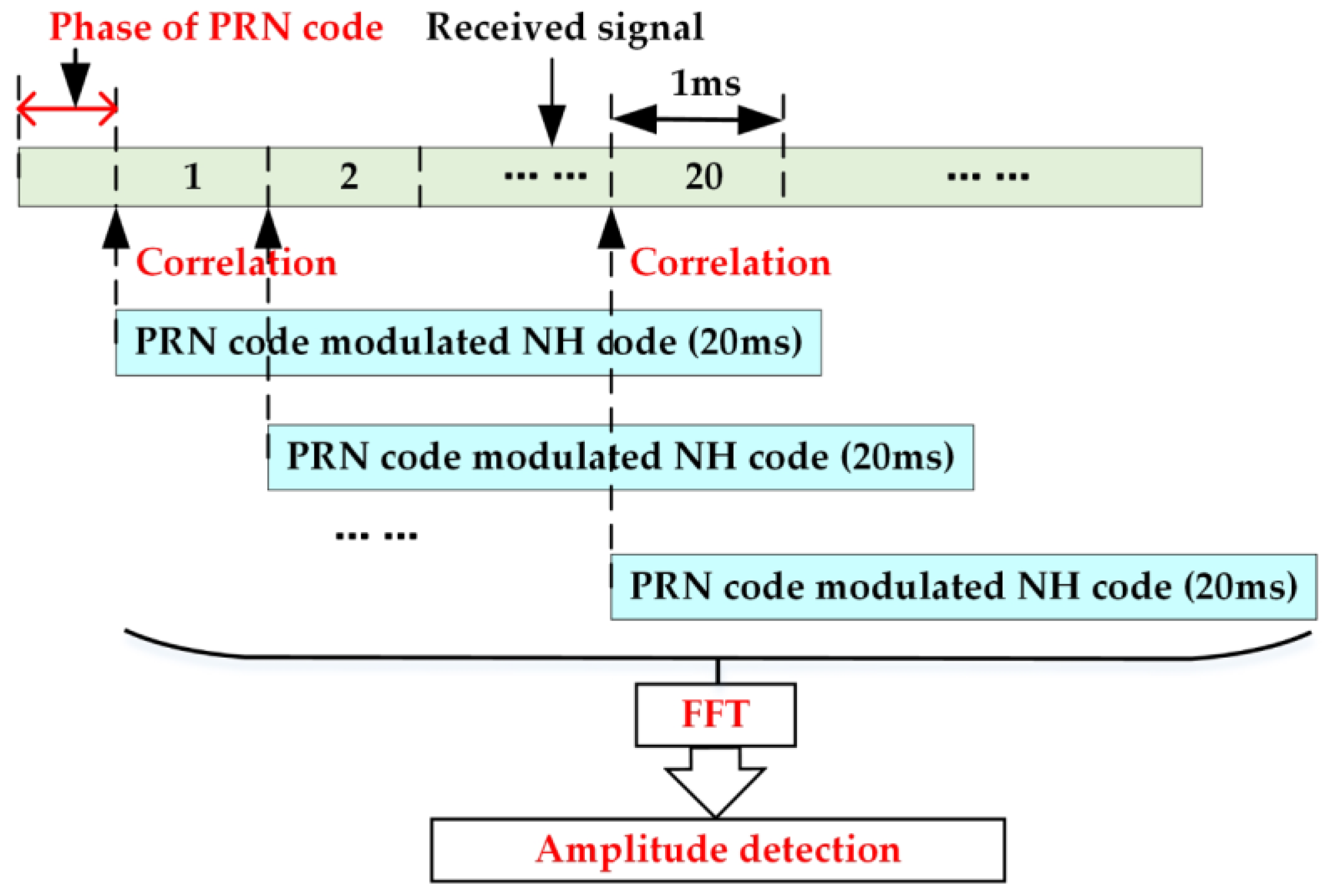
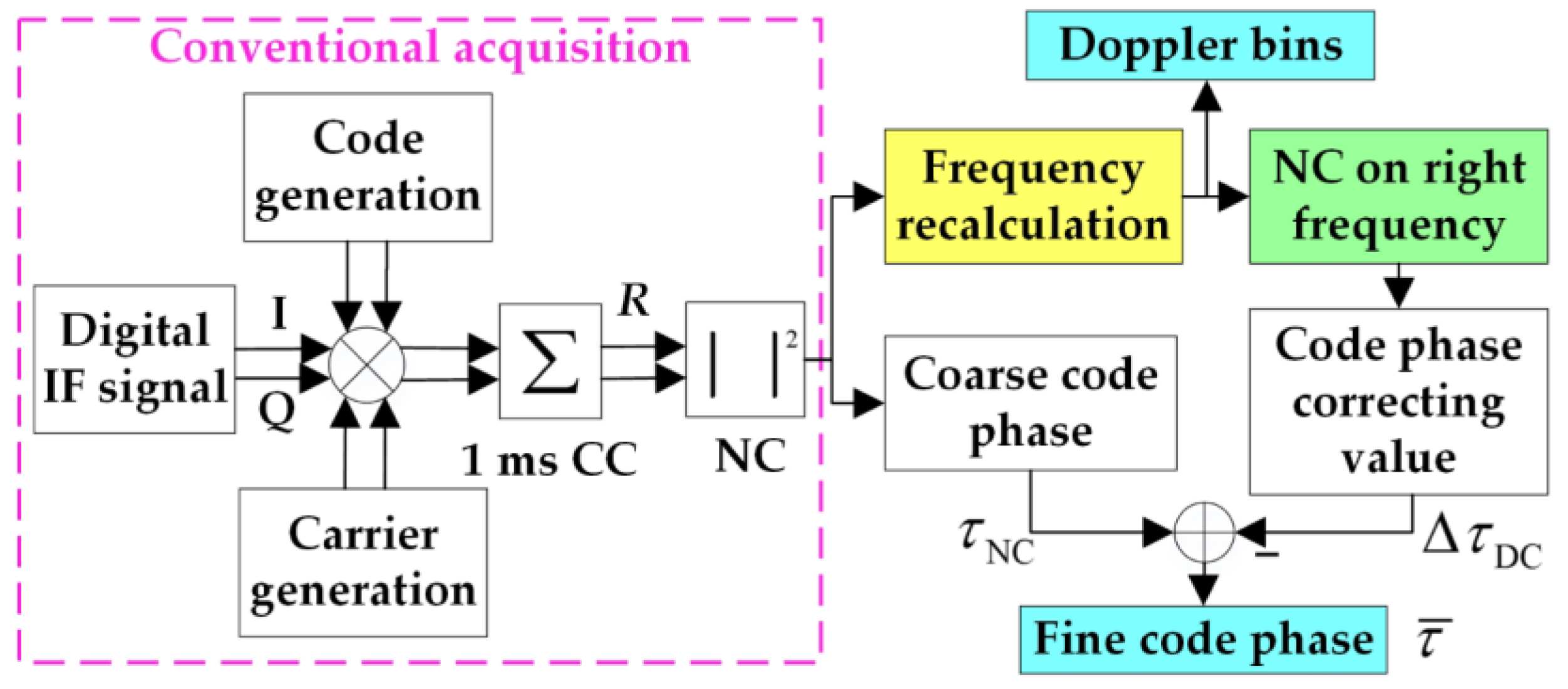
In this study, a frequency search structure is adopted to remove the NH codes and the navigation bits. First, we conduct a conventional CC acquisition to obtain the coarse code phase of PRN codes. Then, we make the local PRN codes align with the received signal at the first bit edge. Next, wew correlate the signal of step two with the whole tiered codes of the PRN codes and NH codes 20 times, of which the delay is 1 ms. Finally, we convert the correlations into frequency domain. There will be 20 outputs, and each output has a maximum value. The largest of these maximums means that both the NH codes and the navigation bits are removed, and a more precise frequency of the received signal is obtained. The diagram of the frequency search structure is shown in
Figure 4.
In open areas, the length of the FFT can be shortened. More specifically, any consecutive chips of the PRN-NH modulated codes can be used for the proposed algorithm. However, the sensitivity differs significantly, as shown in the next section. To satisfy the requirement of the tracking loop initialization in weak signal environments, the whole tiered codes of the PRN and NH codes are a better choice.
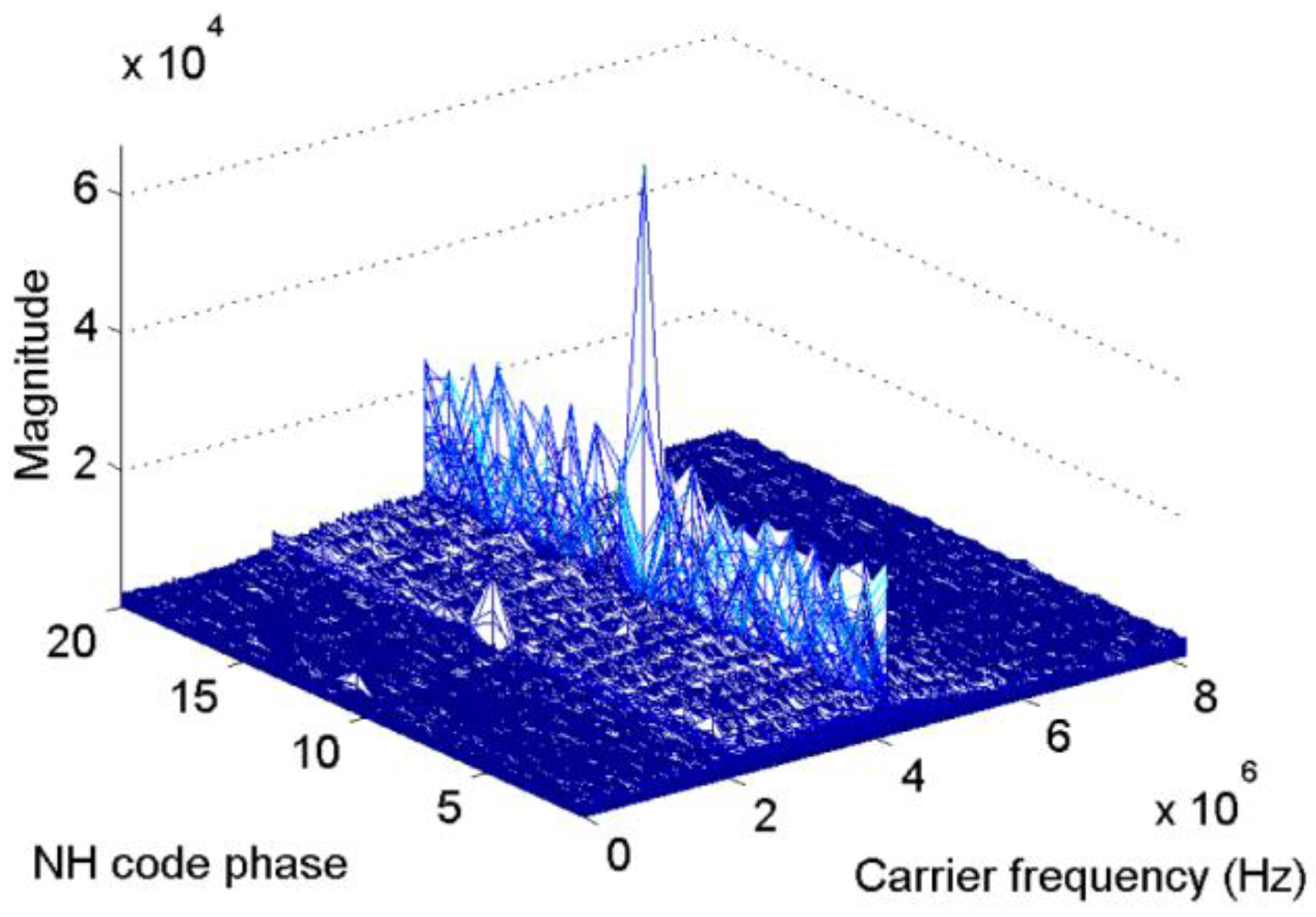
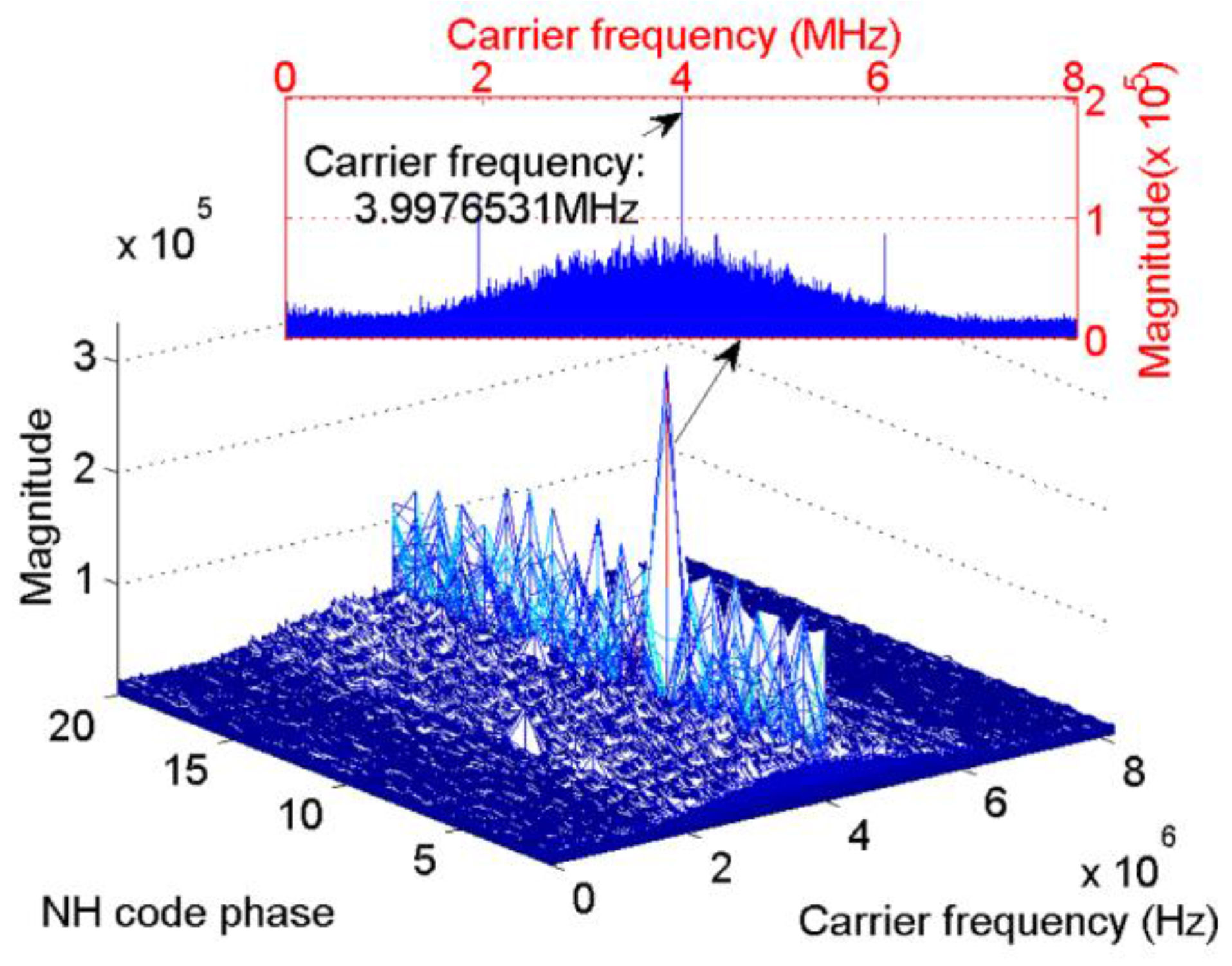
Figure 5 and
Figure 6 present the results of the new scheme of the same signal used in
Figure 3. These parameters will not repeat here. In
Figure 5, the length of the FFT is 524,288 samples, That is, the revolution of the spectrum is
Hz.
Figure 5 shows that the index of the maximum value is 11, which is consistent with the default value. Meanwhile, in the carrier frequency dimension, the peak appears at 4,095,018 Hz, which represents a slight error of 18 Hz.
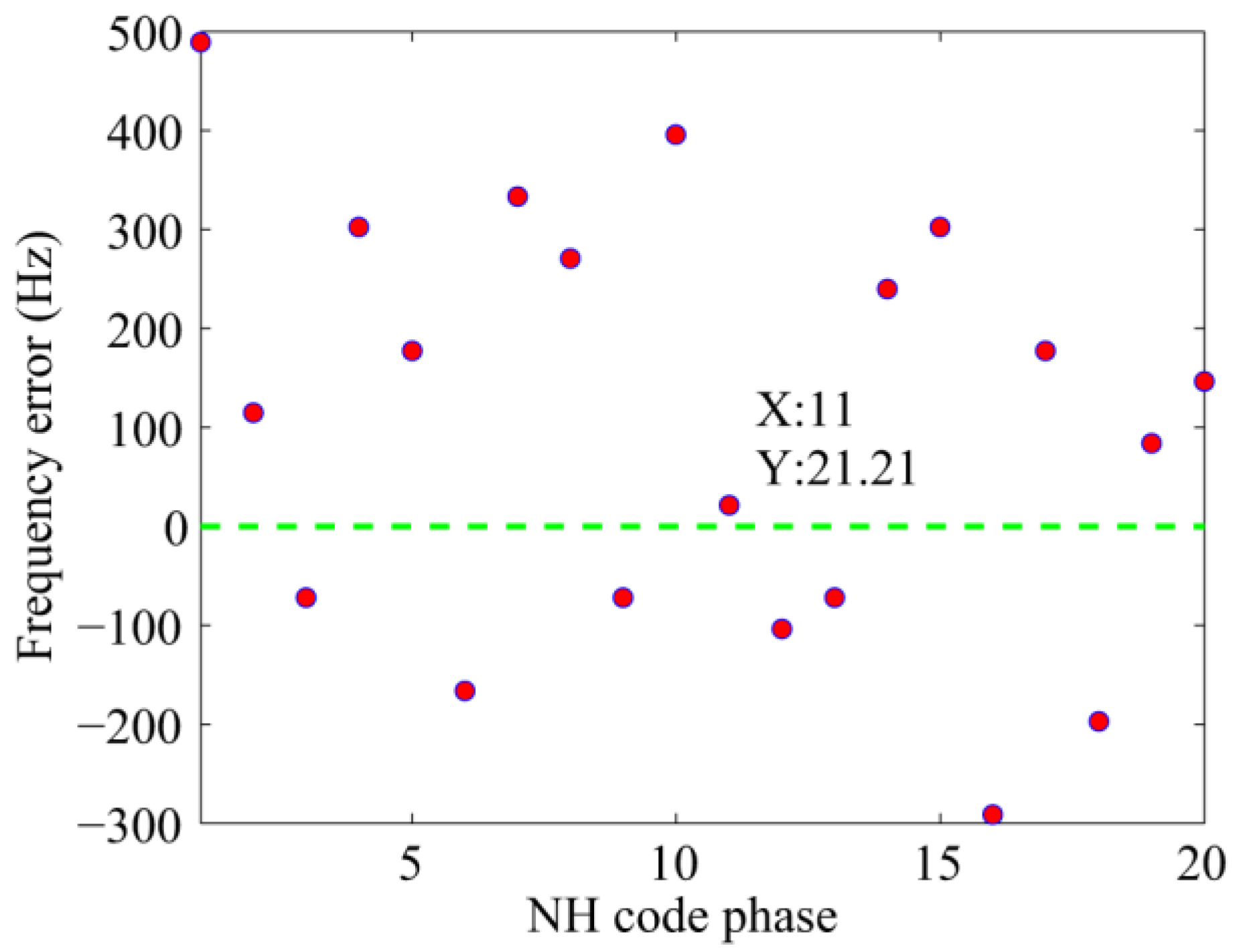
Figure 6 shows the frequency error against different NH code phases in a more direct way. Only when the local NH codes is aligned with the received signal can the peak reach the maximum value. In other cases, the frequency error of tens to hundreds of hertz occurs.
When frequent bit transitions are considered in urban environments, the NC algorithm should be adopted before using the FFT-based frequency recalculation algorithm to increase the peak. In addition to the accuracy frequency, the start point of NH codes can also be found through the proposed scheme, thus, the NH codes can be removed, and there remains only the navigation bits. Then, a conventional DC algorithm will easily be conducted with the fine frequency to correct the code phase of the DC algorithm. The final code phase
of the scheme is determined by the following criterion:
where,
and
represent the peak to second noise ratio of the NC and DC algorithms, respectively. The peak to second noise ratio is usually used for threshold detection, here, it indicates the reliability of the conventional NC and DC algorithms as well. The outputs with high peak to second noise ratio are more reliable.
and
denote the code phases obtained from the conventional NC and DC algorithms, respectively. More specifically,
stands for the code phase error of the NC algorithm owing to step 2 of the frequency recalculation algorithm. If the code phase estimation
is correct,
equals 0; if not,
is corrected with
.
6. Conclusions
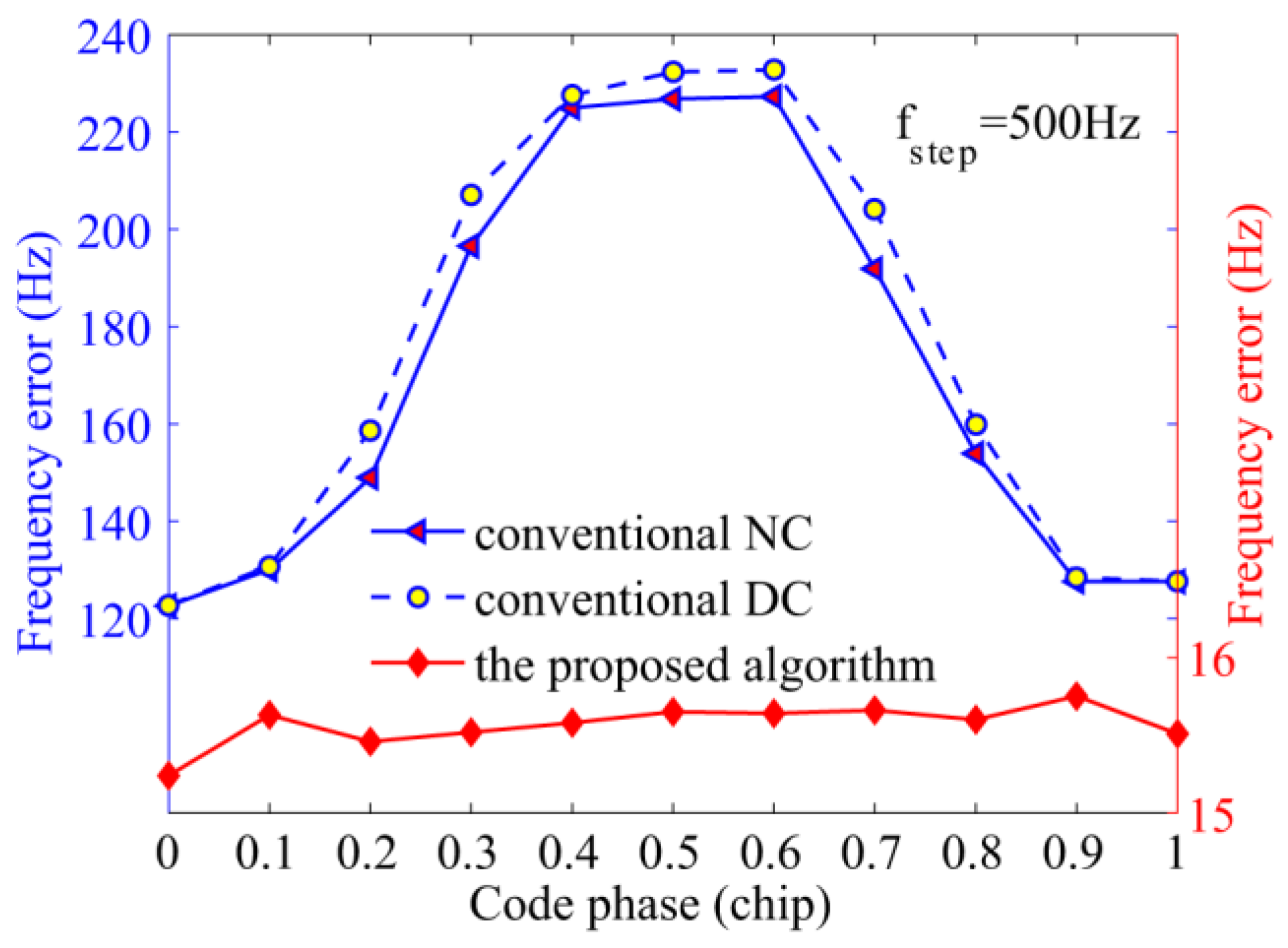
This study selects BDS signal as the research object. It addresses the acquisition of a weak signal channel, and derives the formula of CAF affected by bit transitions of conventional acquisition methods. The results indicate that the frequent bit transitions in BDS signals can cause a large frequency error up to 1000 Hz, which seriously affects the acquisition performance. To address this issue, a frequency recalculation algorithm is proposed. This algorithm uses an additional FFT operation based on the conventional NC algorithm and the coarse code phase, and can obtain the starting point of NH codes at the same time. Then, a fine DC acquisition process is performed to further correct the coarse code phase obtained from the conventional NC algorithm.
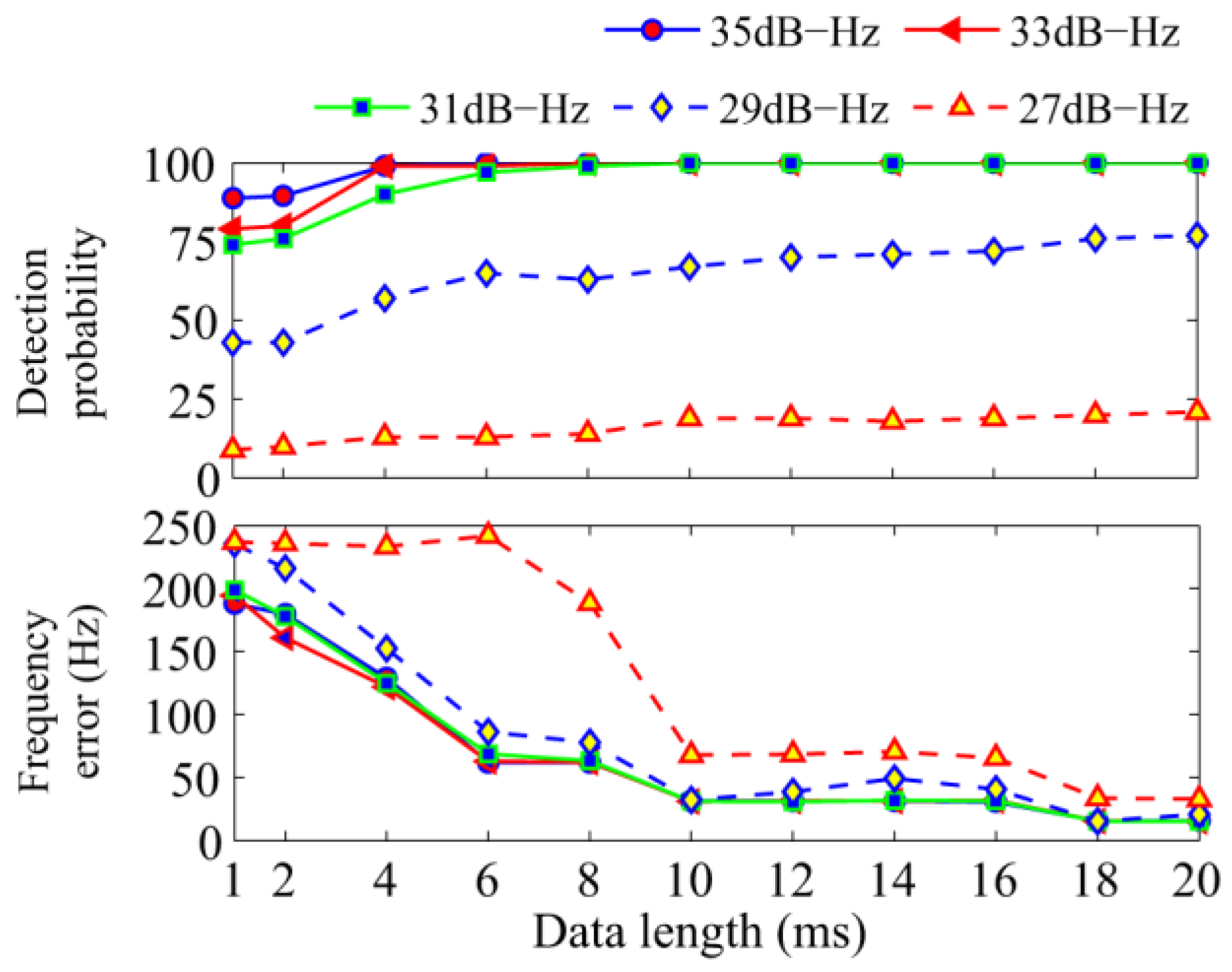
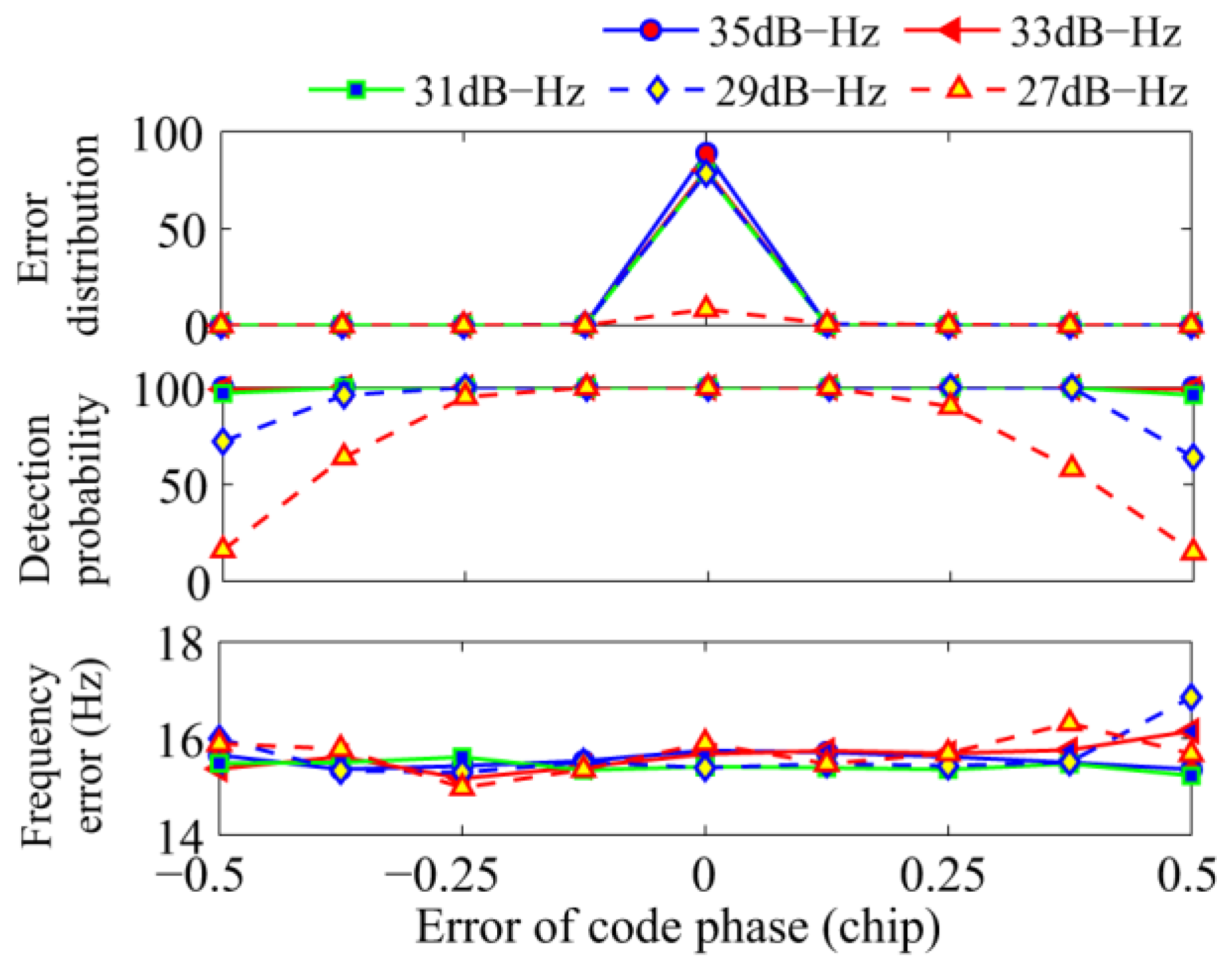
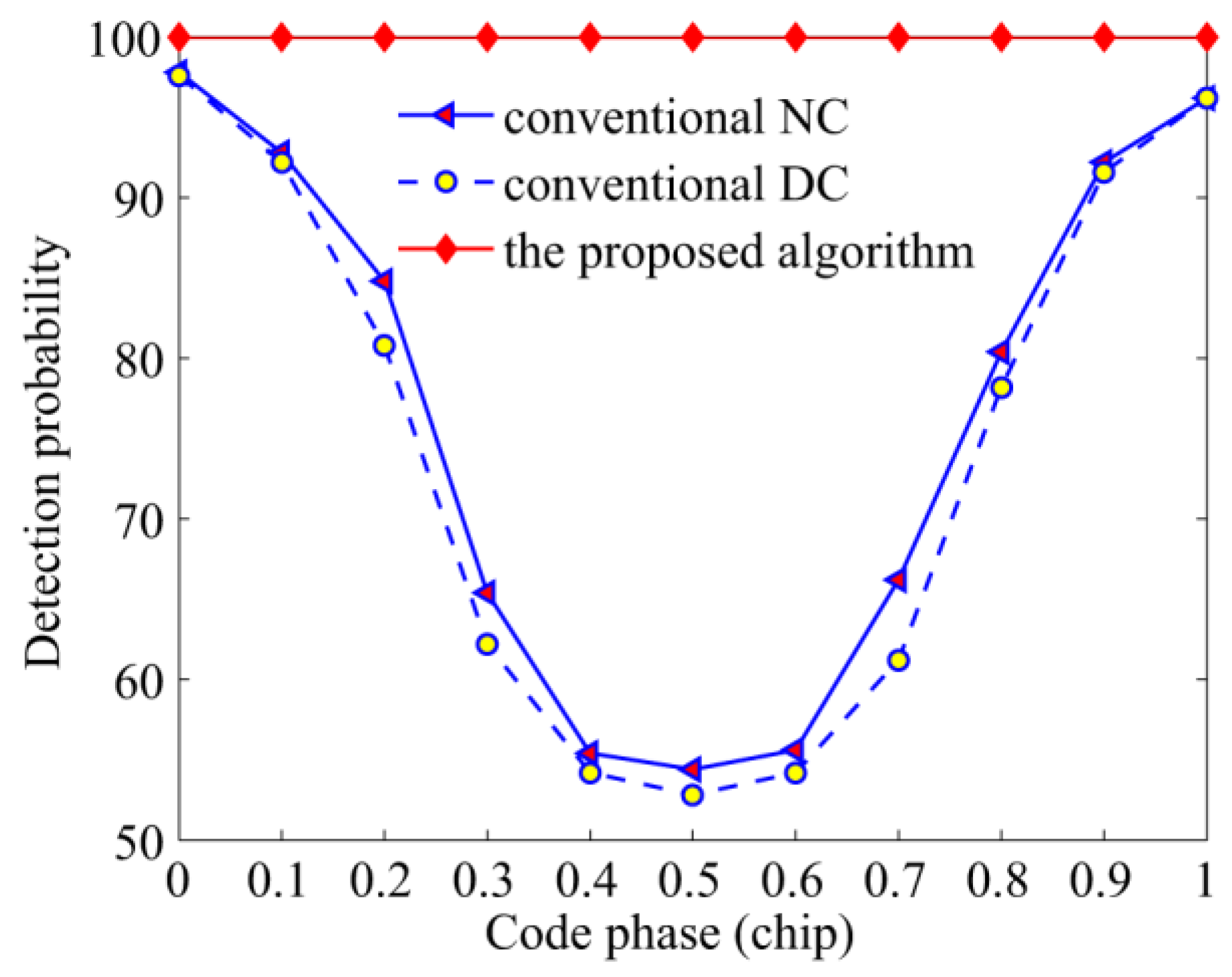
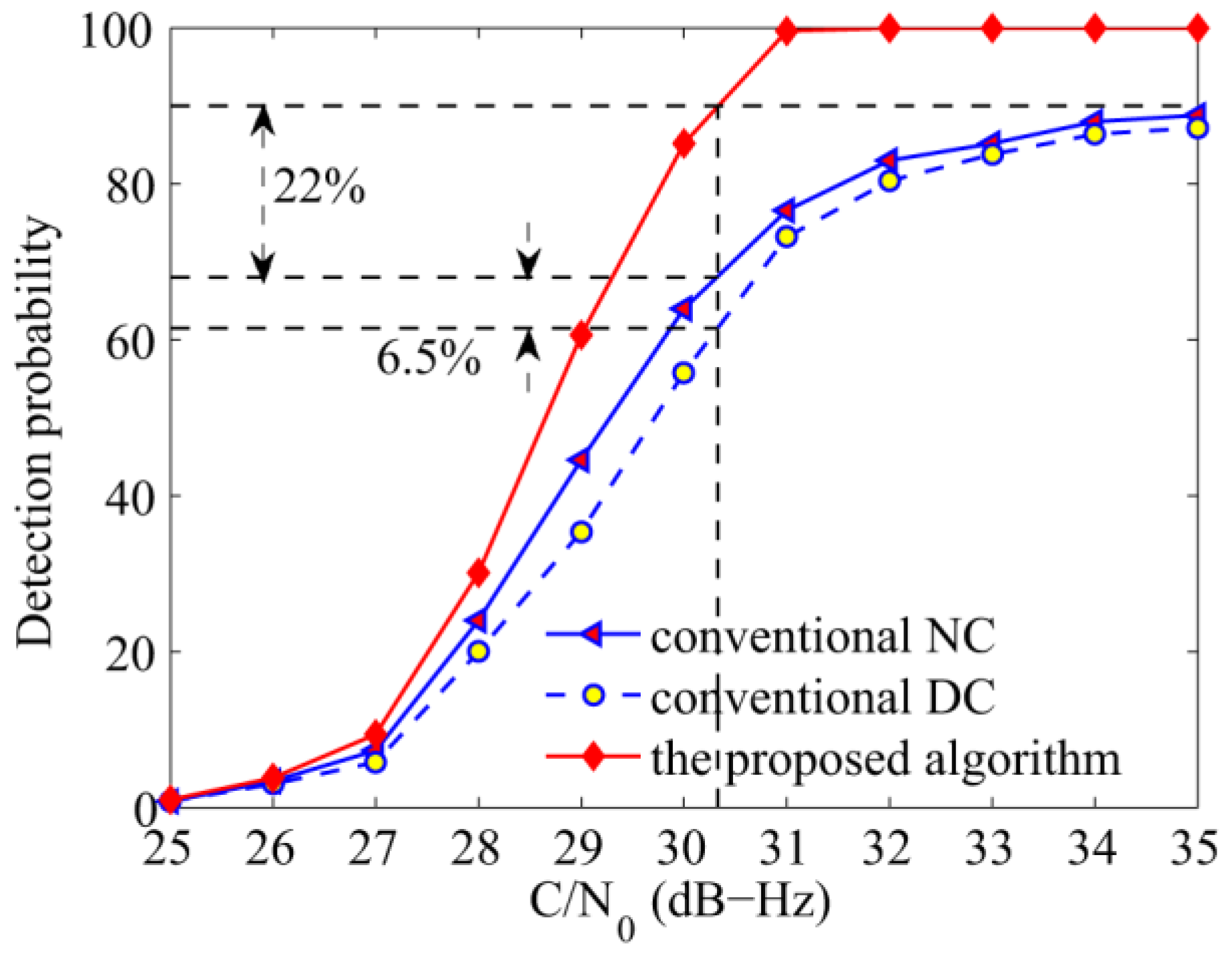
Simulations show that the new acquisition technique is reliable when the conventional NC is successful, and the new acquisition scheme exhibits excellent performance in terms of frequency accuracy and detection probability compared with conventional algorithms. More specifically, the proposed acquisition algorithm can acquire BDS signal of 30.3 dB-Hz effectively within 100 ms even if there exists frequent bit transitions, about 22% higher than conventional algorithms, meanwhile, the acquisition accuracy is higher than 20 Hz. When the delay of PRN codes is 0.5 chips in 45 dB-Hz, the detection probabilities of conventional acquisition algorithms is lower than 60%, while the new algorithm can reach 98% with an accuracy of about 25 Hz. In addition, the start point of NH codes can also be obtained, which is capable of long differential integration time. With the promotion of GNSS modernization, there will be a high demand of the signal acquisition algorithms.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















