
The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work

 ,
,  , , , ,
, , , ,  , ,
, ,  ,
, 
 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
- describe the database and the evaluation criteria used
- analyze and compare the competing IPS under equal evaluation conditions
- present the experiences and suggestions from the competitors to enhance the evaluation framework
- discuss directions to improve a repository that could be used as a universal reference for testing smartphone-based IPS
2. The IPIN 2016 Off-Site Competition
- Wi-Fi or magnetic-based fingerprinting.
- Multi-sensor fusion algorithms trying to exploit dynamic time-correlated information.
- Innovative approaches using map information or activity recognition to complement the above-mentioned ones.
2.1. Main Features of the Competition
- Off-site competition approach. This track was done off-site and offline, so all data processing for calibration and evaluation had to be done before the date of the IPIN conference. Competitors were provided with sensor data logfiles acquired with different mobile phones, including ground truth (known trajectories), that could be used by the teams for tuning their models, as well as data for evaluation (all sensors’ data without ground truth, unknown trajectories).
- Multiple sources of information. The provided data logfiles were captured by using several conventional modern smartphones and a dedicated Android application named GetSensorData [37]. The logfiles contained all of the available signals that were captured in real time with a smartphone: Wi-Fi Received Signal Strengh (RSS), inertial data, magnetic field, GPS, and pressure, among others.
- Continuous motion and recording process. While recording the logfiles with the smartphone, the person moved along a continuous trajectory passing by some known landmarks that were recorded in the logfiles.
- Realistic walking style. The person recording the data moved in a natural way: most of the time walking forward at normal speed, but occasionally taking 90 or 180 degree turns (e.g., at corridor ends), moving backward or laterally at certain points (e.g., if giving way at door accesses), changing floors through elevators and stairs, etc. The user speed was approximately constant when recording the data with eventual stops at some positions.
- Phone holding. The phone was hand held at all times by the user, either stable in front of his face or chest (typical position for reading or typing with the phone), or with the arm downwards while holding the phone in his hand (producing a natural arm swing if walking). No pocket use, calling or any strange handling conditions were considered while collecting data.
- Realistic environment and diversity The competition took place in four different buildings (see Figure 1) that were not modified by installing any additional hardware. Moreover, different smartphones were used to gather the data so the competition was not attached to the features of any particular smartphone.
- Data came from multiple sensors in 2016 competition.
- Database is now provided in logfiles, as sequences of readings from multiple sensors.
- Data has been gathered while the user is moving, whereas data were statically captured in 2015.
- The reference database is not explicitly divided into training and validation sets , including only data with ground truth and data without ground truth. Data without ground truth was used for the evaluation of the different IPS.
- Additional information about the reference dataset was provided: floorplan maps, map-based reference trajectories and videos.
- The testing scenario is comprised of heterogeneous buildings at very different locations.
2.2. Testing Buildings
2.3. Description of Datasets (Logfiles)
Dataset Types
2.4. Submission of Results and Evaluation
3. Description of the Competing IPS
- The HFTS team: S. Knauth and A. Koukofikis. Stuttgart University of Applied Sciences, Stuttgart, Germany [38].
- The UMinho team: A. Moreira, M.J. Nicolau, A. Costa and F. Meneses. University of Minho and Centro de Computação Gráfica, Guimarães, Portugal [39]
- The BlockDox (BD) team: Y. Beer. BlockDox, London, United Kingdom (This competing team did not submit a paper to the conference).
- The FHWS team: T. Fetzer, F. Ebner and F. Deinzer. University of Applied Sciences Würzburg-Schweinfurt, Würzburg, Germany [40].
- The Marauder team: V.C. Ta, D. Vaufreydaz, T.K. Dao, and E. Castelli. Université Grenoble Alpes, CNRS, Inria, LIG, Grenoble, France and Hanoi University of Science and Technology, Hanoi, Vietnam [41].
3.1. The HFTS Team
3.2. The UMinho Team
3.3. The BlockDox Team
3.3.1. Hierarchical Algorithm
3.3.2. Cross Validation and Optimization
3.4. The FHWS Team
3.5. The Marauder Team
3.5.1. Floor Identification and Inferring Absolute Position
3.5.2. Path Approximation within the Floor
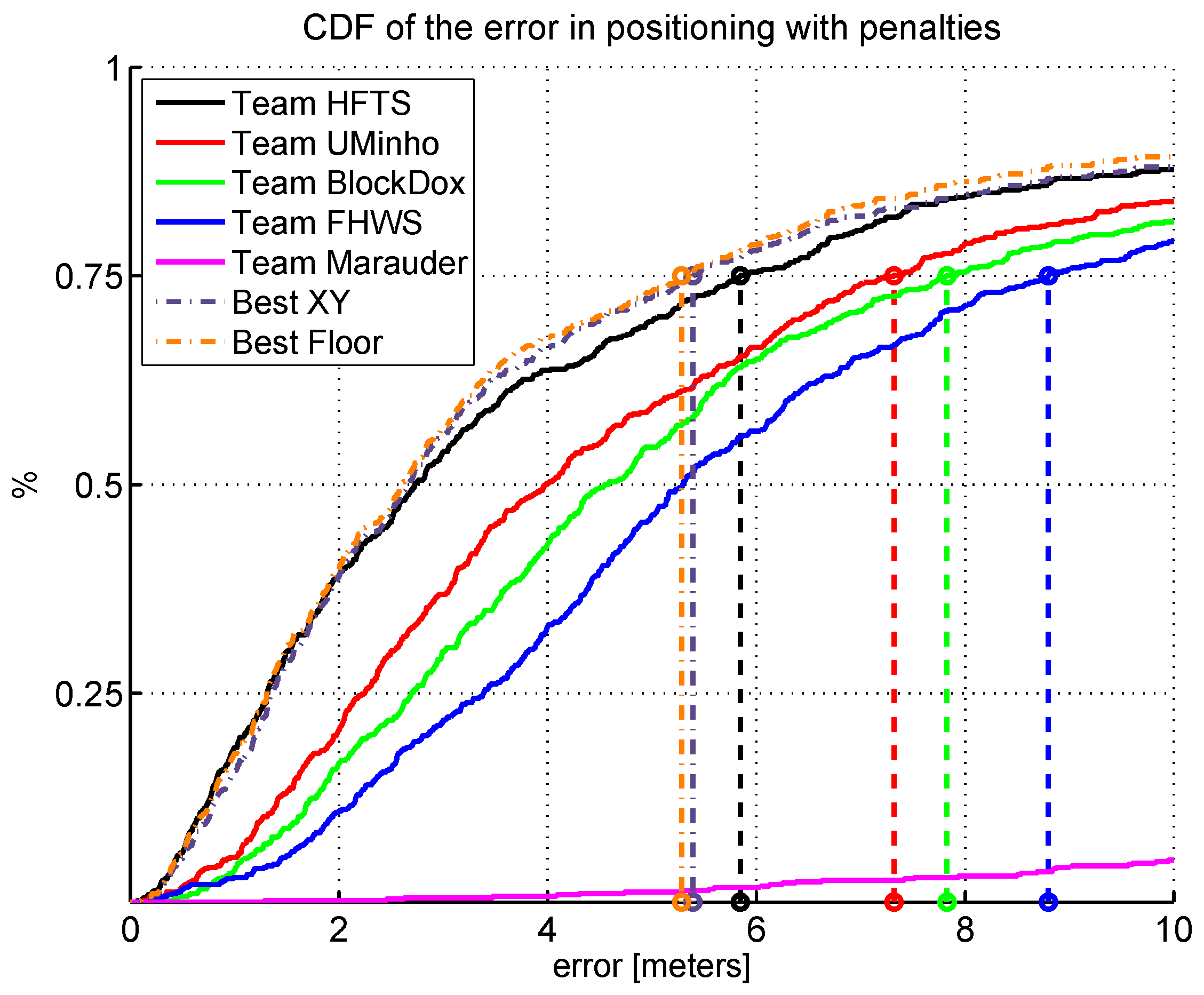
4. Analysis of Results
Discussion on Performance
5. Discussion and Dataset Future Plans
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mautz, R. Indoor Positioning Technologies; Technical Report February 2012, Habilitation Thesis; ETH: Zurich, Switzerland, 2012. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Hightower, J.; Borriello, G. Location Systems for Ubiquitous Computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Avariento, J.; Rambla, D.; Montoliu, R.; Casteleyn, S.; Benedito-Bordonau, M.; Gould, M.; Huerta, J. Enhancing Integrated Indoor/Outdoor Mobility in a Smart Campus. Int. J. Geogr. Inf. Sci. 2015, 26, 1955–1968. [Google Scholar] [CrossRef]
- Chatzimilioudis, G.; Konstantinidis, A.; Laoudias, C.; Zeinalipour-Yazti, D. Crowdsourcing with Smartphones. IEEE Internet Comput. 2012, 16, 36–44. [Google Scholar] [CrossRef]
- Laoudias, C.; Constantinou, G.; Constantinides, M.; Nicolaou, S.; Zeinalipour-Yazti, D.; Panayiotou, C.G. The Airplace Indoor Positioning Platform for Android Smartphones. In Proceedings of the 13th International Conference on Mobile Data Management, Bangalore, India, 23–26 July 2012.
- Adler, S.; Schmitt, S.; Wolter, K.; Kyas, M. A Survey of Experimental Evaluation in Indoor Localization Research. In Proceedings of the IEEE Sixth International conference on Indoor Positioning and Indoor Navigation (IPIN 2015), Banff, AB, Canada, 13–16 October 2015.
- Haute, T.V.; Poorter, E.D.; Lemic, F.; Handziski, V.; Wirstrom, N.; Voigt, T.; Wolisz, A.; Moerman, I. Platform for benchmarking of RF-based indoor localization solutions. IEEE Commun. Mag. 2015, 53, 126–133. [Google Scholar] [CrossRef]
- Lichman, M. University of California, Irvine, School of Information and Computer Sciences, Machine Learning Repository. 2013. Available online: http://archive.ics.uci.edu/ml/index.html (accessed on 8 March 2017).
- Goldbloom, A.; Hamner, B.; Moser, J.; Cukierski, W. kaggle: Your Home for Data Science. Available online: https://www.kaggle.com/ (accessed on 8 March 2017).
- Rhee, I.; Shin, M.; Hong, S.; Lee, K.; Kim, S.; Chong, S. CRAWDAD Dataset Ncsu/Mobilitymodels (v. 2009-07-23). Available online: http://crawdad.org/ncsu/mobilitymodels/20090723 (accessed on 8 March 2017).
- Nahrstedt, K.; Vu, L. CRAWDAD Dataset uiuc/uim (v. 2012-01-24). Available online: http://crawdad.org/uiuc/uim/20120124 (accessed on 8 March 2017).
- Rawassizadeh, R.; Tomitsch, M.; Wac, K.; Tjoa, A.M. UbiqLog: a generic mobile phone-based life-log framework. Personal and ubiquitous. Pers. ubiquitous comput. 2013, 174, 621–637. [Google Scholar] [CrossRef]
- Purohit, A.; Pan, S.; Chen, K.; Sun, Z.; Zhang, P. CRAWDAD Dataset Cmu/Supermarket (v. 2014-05-27). Available online: http://crawdad.org/cmu/supermarket/20140527 (accessed on 8 March 2017).
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the Fifth Conference on Indoor Positioning and Indoor Navigation, Corpus Christi, TX, USA, 20–21 November 2014; pp. 261–270.
- Bacciu, D.; Barsocchi, P.; Chessa, S.; Gallicchio, C.; Micheli, A. An experimental characterization of reservoir computing in ambient assisted living applications. Neural Comput. Appl. 2014, 24, 1451–1464. [Google Scholar] [CrossRef]
- Talvitie, J.; Lohan, E.S.; Renfors, M. The effect of coverage gaps and measurement inaccuracies in fingerprinting based indoor localization. In Proceedings of the International Conference on Localization and GNSS 2014 (ICL-GNSS 2014), Helsinki, Finland, 24–26 June 2014; pp. 1–6.
- Shrestha, S.; Talvitie, J.; Lohan, E.S. Deconvolution-based indoor localization with WLAN signals and unknown access point locations. In Proceedings of the 2013 International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–6.
- Rawassizadeh, R.; Momeni, E.; Dobbins, C.; Mirza-Babaei, P.; Rahnamoun, R. Lesson Learned from Collecting Quantified Self Information via Mobile and Wearable Devices. J. Sens. Actuator Netw. 2015, 4, 315–335. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Rambla, D.; Montoliu, R.; Belmonte, O.; Huerta, J. UJIIndoorLoc-Mag: A new database for magnetic field-based localization problems. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–10.
- Barsocchi, P.; Crivello, A.; Rosa, D.L.; Palumbo, F. A multisource and multivariate dataset for indoor localization methods based on WLAN and geo-magnetic field fingerprinting. In Proceedings of the Seventh International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcalá de Henares, Spain, 4–7 October 2016.
- Moayeri, N.; Ergin, O.; Lemic, F.; Handziski, V.; Wolisz, A. PerfLoc: An Extensive Data Repository for Development and a Web-Based Capability for Performance Evaluation of Smartphone Indoor Localization Apps. In Proceedings of the 27th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Valencia, Spain, 4–7 September 2016.
- Poorter, E.D.; Haute, T.V.; Laermans, E.; Moerman, I. Benchmarking of Localization Solutions: Guidelines for the Selection of Evaluation Points. Ad Hoc Netw. 2017. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Choudhury, R.R.; Yang, X.; Sen, S. Microsoft Indoor Localization Competition—IPSN 2014. Available online: https://www.microsoft.com/en-us/research/event/microsoft-indoor-localization-competition-ipsn-2014 (accessed on 8 March 2017).
- Lymberopoulos, D.; Liu, J.; Yang, X.; Naguib, A.; Rowe, A.; Trigoni, N.; Moayeri, N. Microsoft Indoor Localization Competition—IPSN 2015. Available online: https://www.microsoft.com/en-us/research/event/microsoft-indoor-localization-competition-ipsn-2015 (accessed on 8 March 2017).
- Lymberopoulos, D.; Liu, J.; Zhang, Y.; Dutta, P.; Yang, X.; Rowe, A. Microsoft Indoor Localization Competition—IPSN 2016. Available online: https://www.microsoft.com/en-us/research/event/microsoft-indoor-localization-competition-ipsn-2016 (accessed on 8 March 2017).
- Lymberopoulos, D.; Liu, J.; Bocca, M.; Sequeira, V.; Trigoni, N.; Yang, X.; Zhang, Y.; Rowe, A. Microsoft Indoor Localization Competition—IPSN 2017. Available online: https://www.microsoft.com/en-us/research/event/microsoft-indoor-localization-competition-ipsn-2017 (accessed on 8 March 2017).
- Barsocchi, P.; Potortì, F.; Furfari, F.; Gil, A.M.M. Comparing AAL Indoor Localization Systems. In Evaluating AAL Systems Through Competitive Benchmarking. Indoor Localization and Tracking; Springer: Berlin/Heidelberg, Germany, 2012; pp. 1–13. [Google Scholar]
- Salvi, D.; Barsocchi, P.; Arredondo, M.; Ramos, J. EvAAL, Evaluating AAL Systems through Competitive Benchmarking, the Experience of the 1st Competition. In Evaluating AAL Systems Through Competitive Benchmarking. Indoor Localization and Tracking; Springer: Berlin/Heidelberg, Germany, 2012; pp. 14–25. [Google Scholar]
- Barsocchi, P. Evaluating Indoor Localization Systems for AAL Environments. In Evaluating AAL Systems Through Competitive Benchmarking; Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–5. [Google Scholar]
- EvAAL’12 Awards. Available online: http://content.iospress.com/download/journal-of-ambient-intelligence-and-smart-environments/ais182?id=journal-of-ambient-intelligence-and-smart-environments%2Fais182 (accessed on 8 March 2017).
- Botía, J.A.; Álvarez-García, J.A.; Fujinami, K.; Barsocchi, P.; Riedel, T. (Eds.) Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2013.
- Lemić, F.; Handziski, V.; Wolisz, A.; Constambeys, T.; Laoudias, C.; Zeinalipour-Yazti, D.; Panayiotou, C.; Adler, S.; Schmitt, S.; Will, H.; et al. Systematic Objective Evaluation of RF-based Indoor Localization Algorithms (EVARILOS Open Challenge: Track 3); Technical Report TKN-14-005; Telecommunication Networks Group, Technische Universität Berlin: Berlin, Germany, 2014. [Google Scholar]
- Lemic, F.; Handziski, V.; Wirstrom, N.; Van Haute, T.; De Poorter, E.; Voigt, T.; Wolisz, A. Web-based platform for evaluation of RF-based indoor localization algorithms. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 834–840.
- Potortì, F.; Barsocchi, P.; Girolami, M.; Torres-Sospedra, J.; Montoliu, R. Evaluating indoor localization solutions in large environments through competitive benchmarking: The EvAAL-ETRI competition. In Proceedings of the Sixth International Conference on Indoor Positioning and Indoor Navigation (IPIN 2015), Banff, AB, Canada, 13–16 October 2015.
- Torres-Sospedra, J.; Moreira, A.; Knauth, S.; Berkvens, R.; Montoliu, R.; Belmonte, O.; Trilles, S.; João Nicolau, M.; Meneses, F.; Costa, A.; et al. A realistic evaluation of indoor positioning systems based on Wi-Fi fingerprinting: The 2015 EvAAL–ETRI competition. J. Ambient Intell. Smart Environ. 2017, 9, 263–279. [Google Scholar] [CrossRef]
- Zampella, F.; Jiménez, A.R.; Seco, F. LOPSI repository: GetSensorData application. Available online: http://lopsi.weebly.com/downloads.html (accessed on 8 March 2017).
- Knauth, S.; Koukofikis, A. Smartphone positioning in large environments by sensor data fusion, particle filter and FCWC. In Proceedings of the Seventh International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcalá de Henares, Spain, 4–7 October 2016.
- Moreira, A.; Nicolau, M.J.; Costa, A.; Meneses, F. Indoor tracking from multidimensional sensor data: UMINHO at the IPIN 2016 Competition. In Proceedings of the Seventh International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcalá de Henares, Spain, 4–7 October 2016.
- Fetzer, T.; Ebner, F.; Deinzer, F.; Köping, L.; Grzegorzek, M. On Monte Carlo Smoothing in Multi Sensor Indoor Localisation. In Proceedings of the Seventh International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcalá de Henares, Spain, 4–7 October 2016.
- Ta, V.C.; Vaufreydaz, D.; Dao, T.K.; Castelli, E. Smartphone-based User Location Tracking in Indoor Environment. In Proceedings of the Seventh International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), Alcalá de Henares, Spain, 4–7 October 2016.
- Google: Develop—API Guides—Location and Sensors. Motion Sensors. Available online: https://developer.android.com/guide/topics/sensors/sensors_motion.html (accessed on 8 March 2017).
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Willemsen, T.; Keller, F.; Sternberg, H. A topological approach with MEMS in smartphones based on routing-graph. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–6.
- Knauth, S.; Storz, M.; Dastageeri, H.; Koukofikis, A.; Mähser-Hipp, N. Fingerprint Calibrated Centroid and Scalar Product Correlation RSSI Positioning in Large Environments. In Proceedings of the Sixth International Conference on Indoor Positioning and Indoor Navigation (IPIN 2015), Banff, AB, Canada, 13–16 October 2015.
- Nurminen, H.; Ristimäki, A.; Ali-Löytty, S.; Piché, R. Particle filter and smoother for indoor localization. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbéliard, France, 28–31 October 2013; pp. 1–10.
- Marques, N.; Meneses, F.; Moreira, A. Combining similarity functions and majority rules for multi-building, multi-floor, WiFi positioning. In Proceedings of the 3th the International Conference on Indoor Positioning and Indoor Navigation (IPIN’2012), Sydney, Australia, 13–15 November 2012.
- Cover, T.; Hart, P. Nearest Neighbor Pattern Classification. IEEE Trans. Inf. Theor. 1967, 131, 21–27. [Google Scholar] [CrossRef]
- Moreira, A.; Nicolau, M.J.; Meneses, F.; Costa, A. Wi-Fi fingerprinting in the real world—RTLS@UM at the EvAAL competition. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–10.
- Ebner, F.; Fetzer, T.; Köping, L.; Grzegorzek, M.; Deinzer, F. Multi Sensor 3D Indoor Localisation. In Proceedings of the Sixth International Conference on Indoor Positioning and Indoor Navigation (IPIN 2015), Banff, AB, Canada, 13–16 October 2015.
- Ebner, F.; Fetzer, T.; Grzegorzek, M.; Deinzer, F. On Prior Navigation Knowledge in Multi Sensor Indoor Localisation. In Proceedings of the International Conference on Information Fusion (FUSION 2016), Heidelberg, Germany, 5–8 July 2016.
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22Nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016.
- Kjaergaard, M.; Munk, C. Hyperbolic Location Fingerprinting: A Calibration-Free Solution for Handling Differences in Signal Strength. In Proceedings of the Sixth Annual IEEE International Conference on Pervasive Computing and Communications, Hong Kong, China, 17–21 March 2008; pp. 110–116.
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/magnetic Sensor Arrays; University of Bristol: Bristol, UK, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| # | Building * | Route | Floors | Landmarks | Duration (s) | Smartphone |
|---|---|---|---|---|---|---|
| 01 | CAR | 1 | 1 | 75 | 1257 | S3 |
| 02 | CAR | 1 | 1 | 75 | 1260 | S3mini |
| 03 | CAR | 2 | 1 | 52 | 888 | S3 |
| 04 | CAR | 2 | 1 | 52 | 887 | S4 |
| 05 | UAH | 1 | 3 | 67 | 1101 | S3 |
| 06 | UAH | 1 | 3 | 67 | 1101 | S4 |
| 07 | UAH | 2 | 4 | 64 | 1192 | S3 |
| 08 | UAH | 2 | 4 | 64 | 1188 | S4 |
| 09 | UAH | 4 | 2 | 29 | 508 | S3 |
| 10 | UAH | 4 | 2 | 29 | 508 | S4 |
| 11 | UJIUB | 1 | 6 | 58 | 529 | S3 |
| 12 | UJIUB | 1’ | 6 | 58 | 467 | S3 |
| 13 | UJIUB | 2 | 6 | 59 | 397 | S3 |
| 14 | UJIUB | 2’ | 6 | 59 | 375 | S3 |
| 15 | UJIUB | 3 | 6 | 60 | 516 | S3 |
| 16 | UJITI | 1 | 3 | 360 | 1134 | GN5 |
| 17 | UJITI | 2 | 3 | 291 | 590 | GN5 |
| # | Building * | Route | Floors | Landmarks | Duration (s) | Smartphone |
|---|---|---|---|---|---|---|
| 01 | UJITI | 3 | 3 | 46 | 241 | HW |
| 02 | UJIUB | 4 | 6 | 91 | 730 | S3 |
| 03 | UAH | 3 | 4 | 65 | 1476 | S3 |
| 04 | UJITI | 4 | 3 | 75 | 430 | SP |
| 05 | UAH | 5 | 3 | 42 | 899 | S4 |
| 06 | CAR | 3 | 1 | 76 | 1223 | S3 |
| 07 | UAH | 3 | 4 | 65 | 1477 | S4 |
| 08 | UAH | 5 | 3 | 42 | 899 | S3 |
| 09 | CAR | 3 | 1 | 76 | 1223 | S4 |
| All Logfiles | Logfile01 | Logfile02 | Logfile03 | Logfile04 | |||||||
| 3rd Q. | Mean | flr | Mean | flr | Mean | flr | Mean | flr | Mean | flr | |
| HFTS | 5.85 | 5.76 | 95.67% | 2.50 | 100% | 5.16 | 89.01% | 18.27 | 84.62% | 2.03 | 100% |
| UMinho | 7.32 | 6.33 | 96.54% | 4.03 | 97.83% | 6.26 | 80.22% | 12.04 | 100% | 4.32 | 100% |
| BlockDox | 7.83 | 7 | 92.73% | 6.46 | 78.26% | 5.61 | 87.91% | 15.11 | 87.69% | 3.66 | 100% |
| FHWS | 8.8 | 8.23 | 96.02% | 6 | 93.48% | 7.8 | 78.02% | 16.74 | 100% | 5.94 | 100% |
| Marauder | 40.9 | 32.6 | 51.38% | 33.9 | 39.13% | 22.57 | 32.97% | 43.4 | 18.46% | 36.42 | 42.67% |
| Best XY | 5.39 | 4.94 | 96.19% | 2.5 | 100% | 5.16 | 89.01% | 12.04 | 100% | 2.03 | 100% |
| Best Floor | 5.28 | 4.74 | 98.27% | 2.5 | 100% | 5.16 | 89.01% | 12.04 | 100% | 2.03 | 100% |
| Logfile05 | Logfile06 | Logfile07 | Logfile08 | Logfile09 | |||||||
| Mean | flr | Mean | flr | Mean | flr | Mean | flr | Mean | flr | ||
| HFTS | 4.49 | 100% | 1.73 | 100% | 5.52 | 100% | 13.2 | 88.10% | 2.23 | 100% | |
| UMinho | 5.05 | 97.62% | 5.76 | 100% | 4.45 | 100% | 10.45 | 100% | 5.5 | 100% | |
| BlockDox | 7.33 | 90.48% | 4.51 | 100% | 7.36 | 92.31% | 10.92 | 90.48% | 5.17 | 100% | |
| FHWS | 8.18 | 100% | 4.23 | 100% | 6.32 | 100% | 19.73 | 100% | 4.39 | 100% | |
| Marauder | 25.83 | 35.71% | 23.97 | 100% | 57.38 | 26.15% | 24.09 | 50% | 26.7 | 100% | |
| Best XY | 4.49 | 100% | 1.73 | 100% | 4.45 | 100% | 10.92 | 90.48% | 2.23 | 100% | |
| Best Floor | 4.49 | 100% | 1.73 | 100% | 4.45 | 100% | 10.45 | 100% | 2.23 | 100% | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.-C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors 2017, 17, 557. https://doi.org/10.3390/s17030557
Torres-Sospedra J, Jiménez AR, Knauth S, Moreira A, Beer Y, Fetzer T, Ta V-C, Montoliu R, Seco F, Mendoza-Silva GM, et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors. 2017; 17(3):557. https://doi.org/10.3390/s17030557
Chicago/Turabian StyleTorres-Sospedra, Joaquín, Antonio R. Jiménez, Stefan Knauth, Adriano Moreira, Yair Beer, Toni Fetzer, Viet-Cuong Ta, Raul Montoliu, Fernando Seco, Germán M. Mendoza-Silva, and et al. 2017. "The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work" Sensors 17, no. 3: 557. https://doi.org/10.3390/s17030557
APA StyleTorres-Sospedra, J., Jiménez, A. R., Knauth, S., Moreira, A., Beer, Y., Fetzer, T., Ta, V. -C., Montoliu, R., Seco, F., Mendoza-Silva, G. M., Belmonte, O., Koukofikis, A., Nicolau, M. J., Costa, A., Meneses, F., Ebner, F., Deinzer, F., Vaufreydaz, D., Dao, T. -K., & Castelli, E. (2017). The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors, 17(3), 557. https://doi.org/10.3390/s17030557