
Precise Orbit Solution for Swarm Using Space-Borne GPS Data and Optimized Pseudo-Stochastic Pulses


Abstract
:1. Introduction
2. Reduced Dynamic Orbit Determination
3. Swarm Orbit Strategy
- (1)
- A priori STD is 101 mm/s
- (2)
- A priori STD is 100 mm/s
- (3)
- A priori STD is 10−1 mm/s
- (4)
- A priori STD is 10−2 mm/s
- (5)
- A priori STD is 10−3 mm/s
- (6)
- A priori STD is 10−4 mm/s
- (7)
- A priori STD is 101 mm/s in R direction,
- (8)
- A priori STD is 100 mm/s in R direction,
- (9)
- A priori STD is 10−1 mm/s in R direction,
- (10)
- A priori STD is 10−2 mm/s in R direction,
- (11)
- A priori STD is 10−3 mm/s in R direction,
- (12)
- A priori STD is 10−4 mm/s in R direction.
- (13)
- A priori STD is 101 mm/s in T direction,
- (14)
- A priori STD is 100 mm/s in T direction,
- (15)
- A priori STD is 10−1 mm/s in T direction,
- (16)
- A priori STD is 10−2 mm/s in T direction,
- (17)
- A priori STD is 10−3 mm/s in T direction,
- (18)
- A priori STD is 10−4 mm/s in T direction.
- (19)
- A priori STD is 101 mm/s in N direction,
- (20)
- A priori STD is 100 mm/s in N direction,
- (21)
- A priori STD is 10−1 mm/s in N direction,
- (22)
- A priori STD is 10−2 mm/s in N direction,
- (23)
- A priori STD is 10−3 mm/s in N direction,
- (24)
- A priori STD is 10−4 mm/s in N direction.
4. Experiments
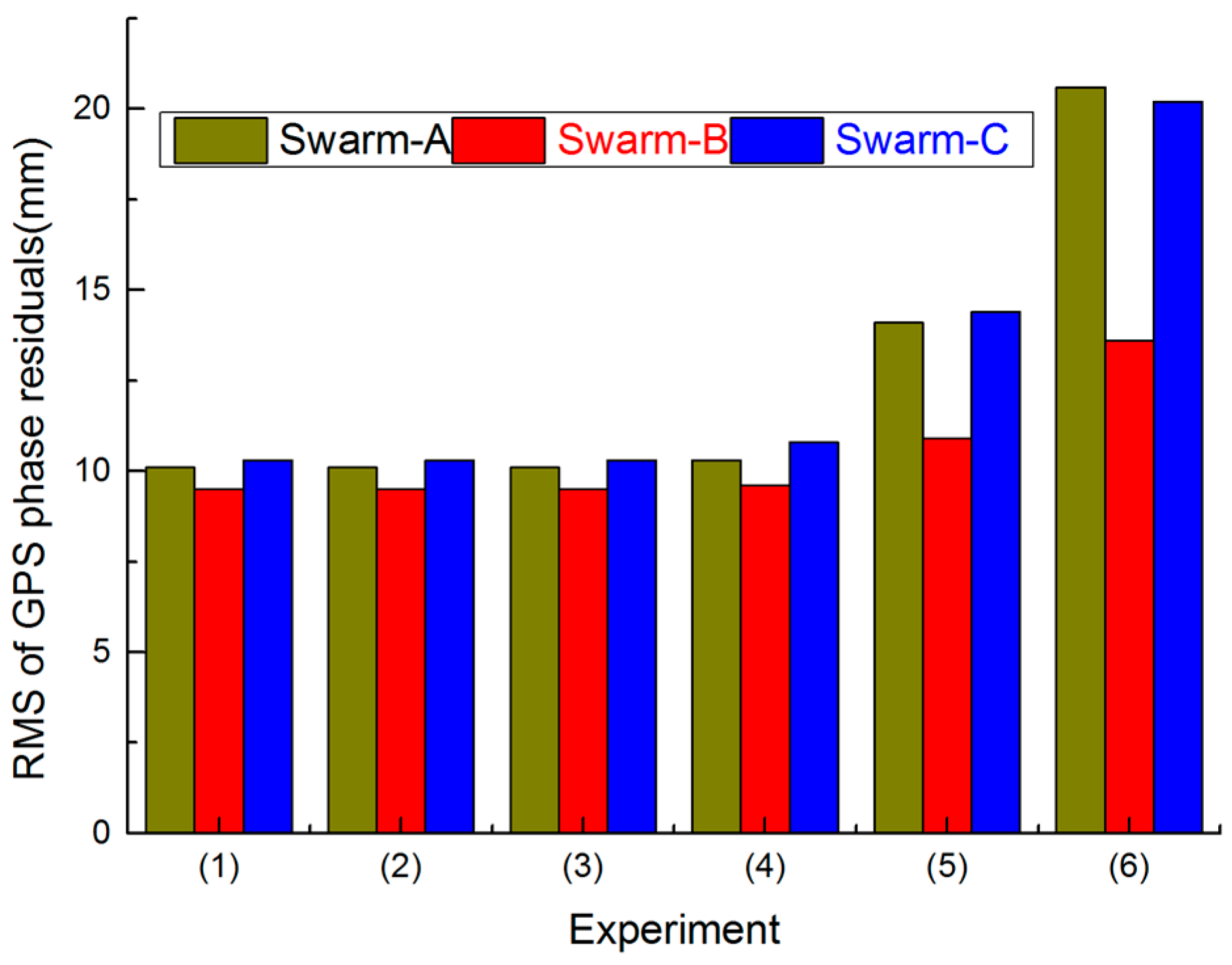
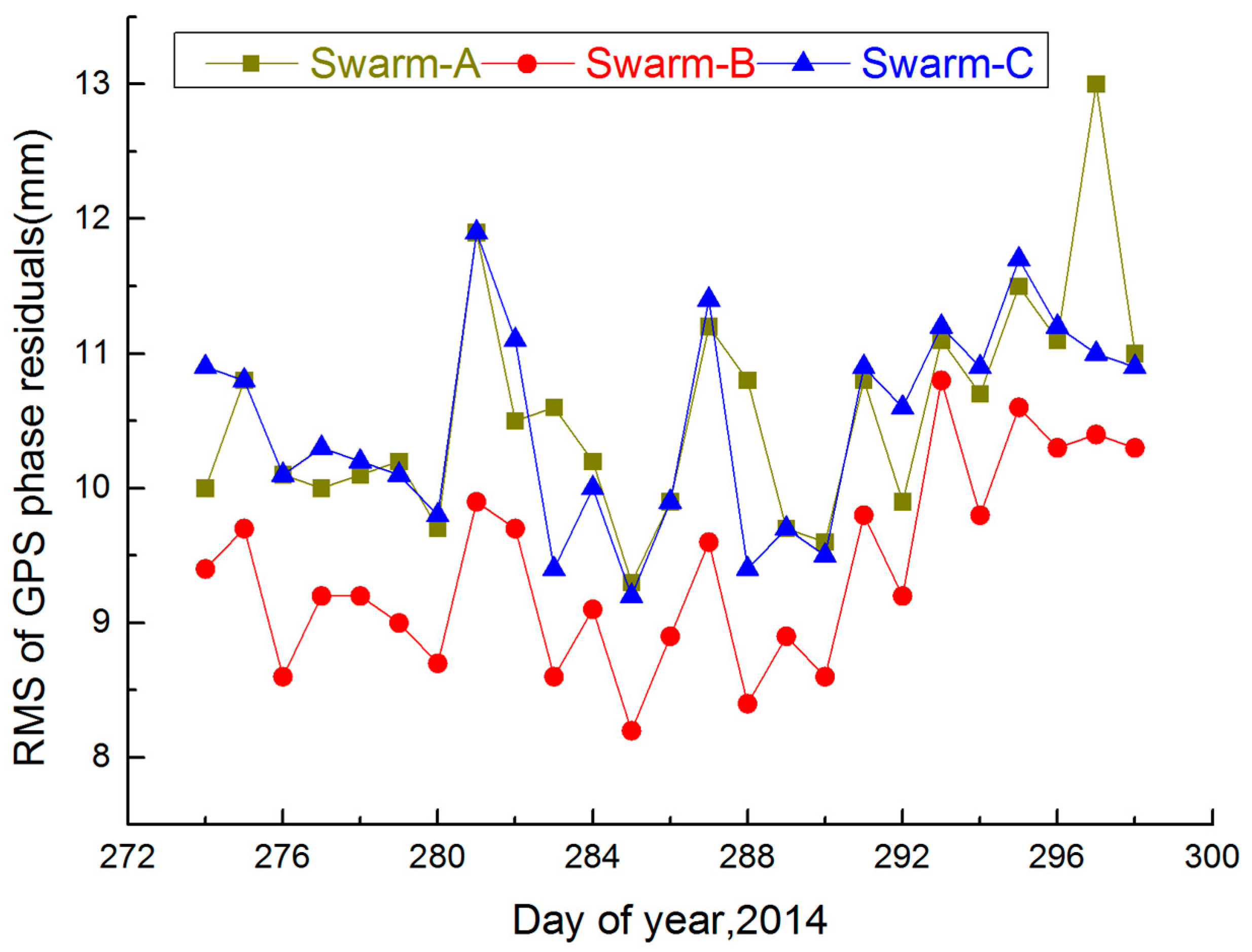
4.1. Swarm GPS Phase Residuals
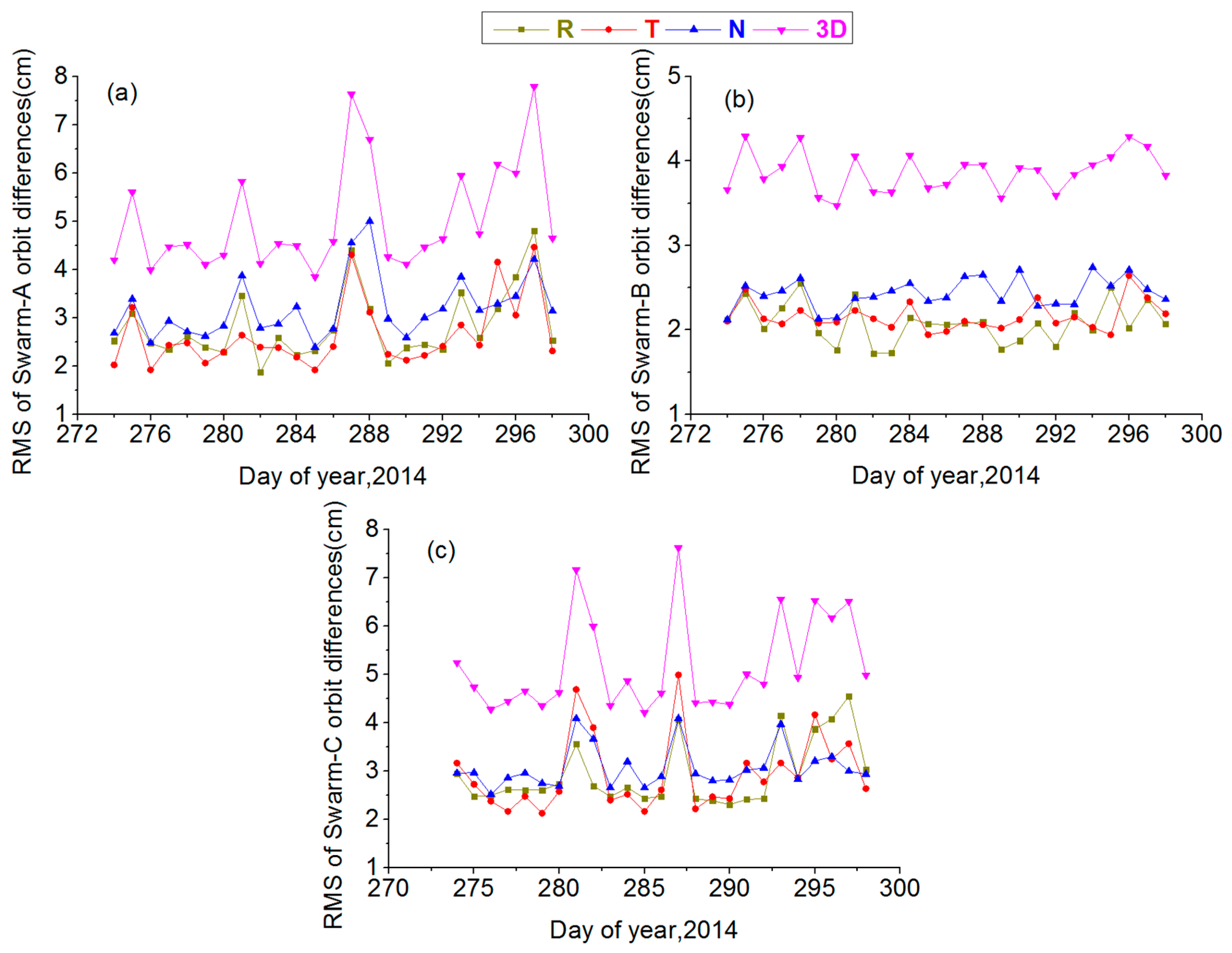
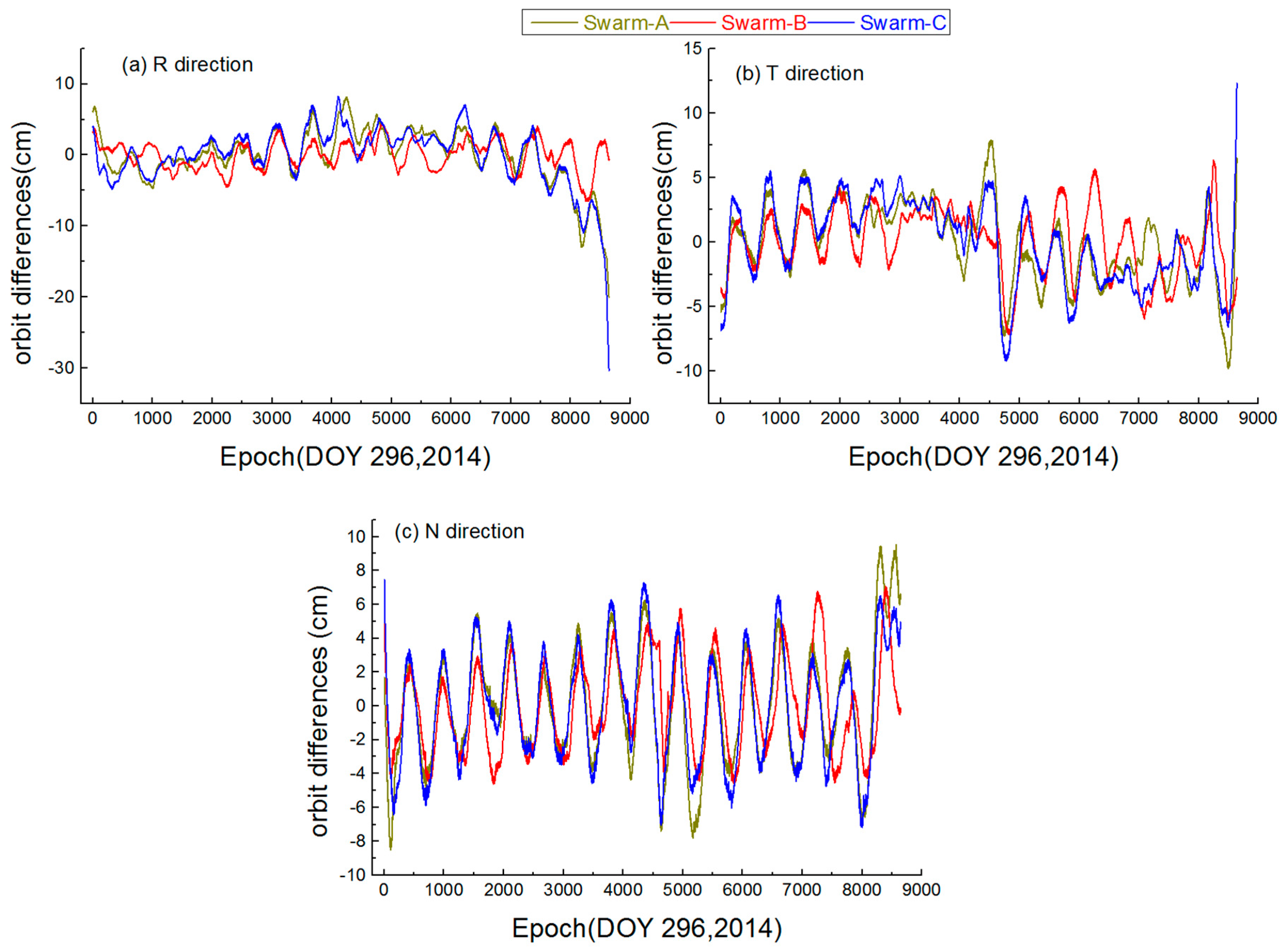
4.2. Comparison with PSO Produced by ESA
4.3. SLR Validation
5. Conclusions
- (1)
- The chosen force models and observation models used in the reduced-dynamic determination have good fit under high ionospheric activity. The orbital fits to GPS tracking data for Swarm-B are better than those of Swarm-A and Swarm-C.
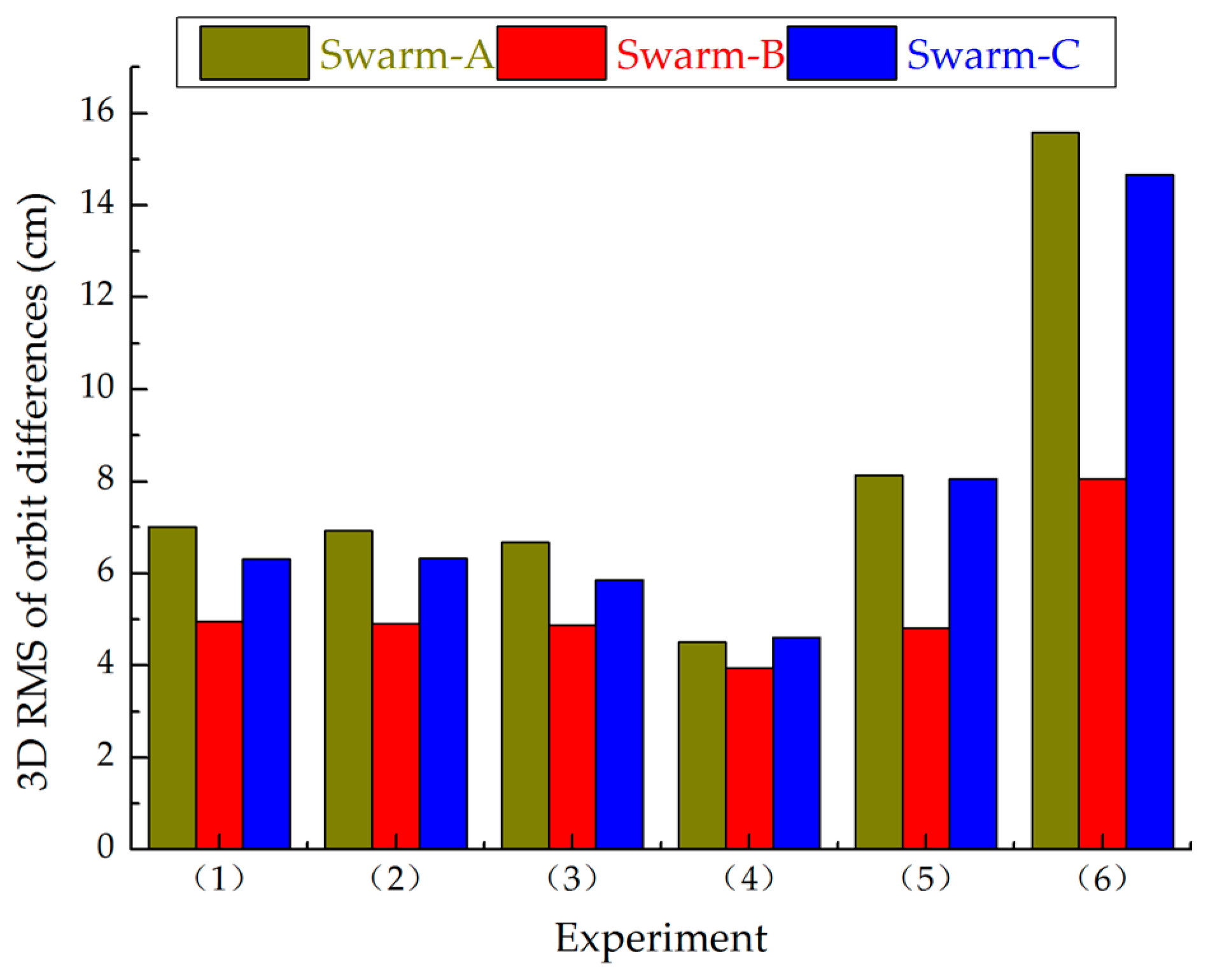
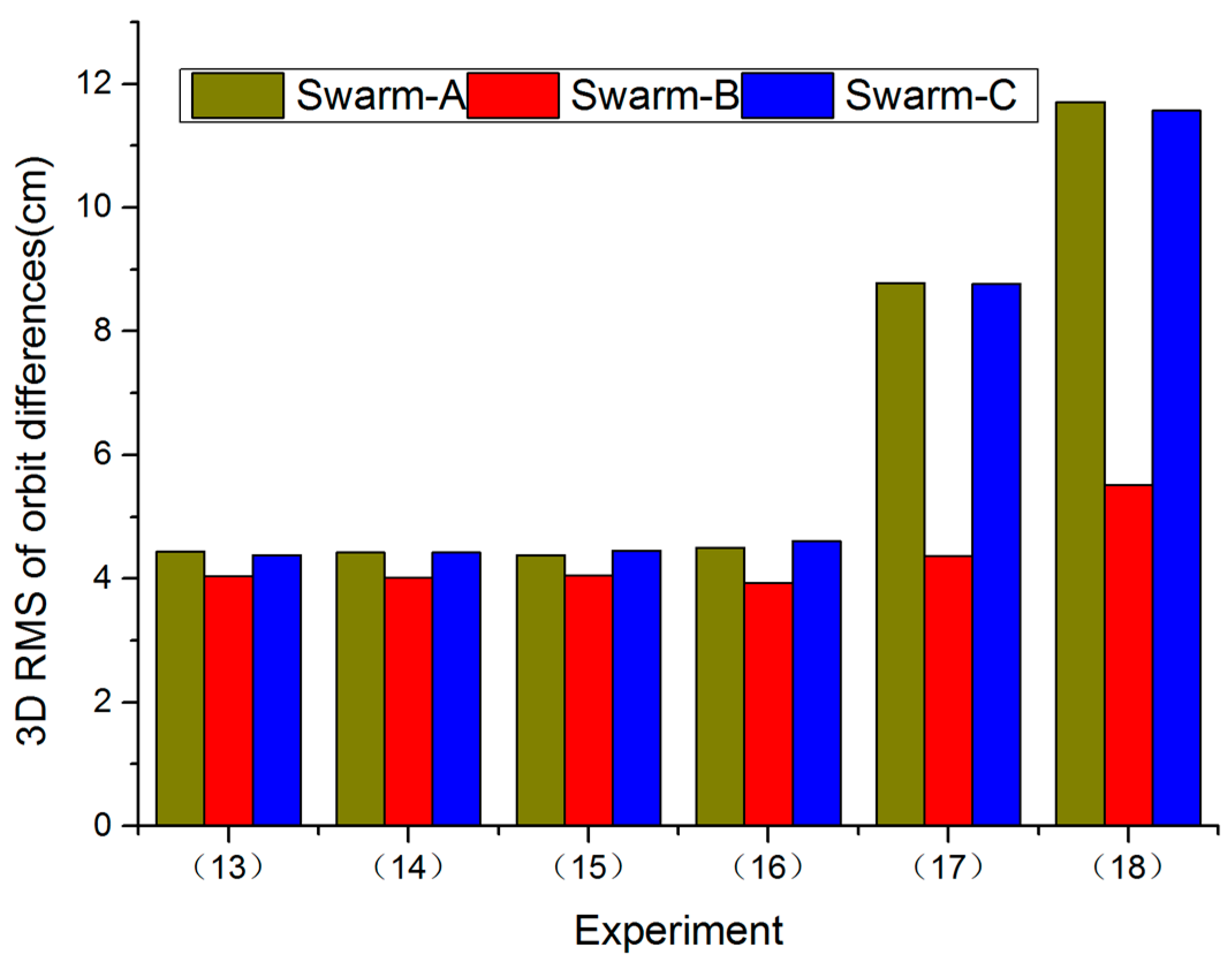
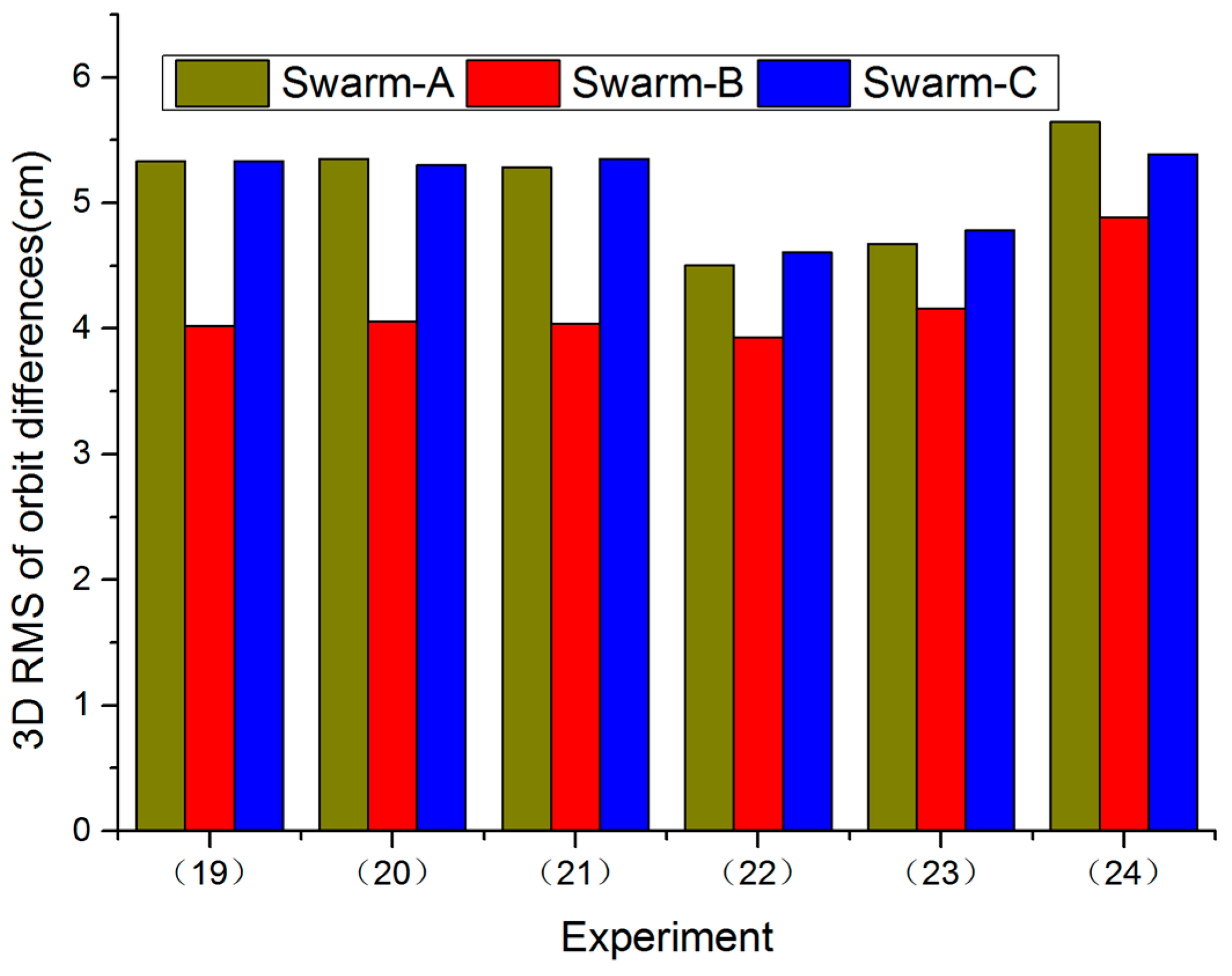
- (2)
- Pseudo-stochastic pulses with a time interval of 6 min and a priori STD of 10−2 mm/s in the R, T and N directions are optimized in the Swarm ZD reduced-dynamic POD.
- (3)
- The mean RMS values of orbit differences for all three Swarm satellites are within 2–4 cm in R, T and N directions and 3–6 cm in 3D direction. Independent SLR validation indicates that the accuracy of the Swarm reduced-dynamic orbits is in the range of 2–4 cm. Moreover, Swarm-B orbit accuracy is better than those of Swarm-A and Swarm-C. Therefore, no obvious systematic bias is found between PSOs produced by ESA and orbit solutions computed using the force models and orbit strategy.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Friis-Christensen, E.; Lühr, H.; Knudsen, D.; Haagmans, R. Swarm—An earth observation mission investigating geospace. Adv. Space Res. 2008, 41, 210–216. [Google Scholar] [CrossRef]
- Jäggi, A.; Dahle, C.; Arnold, D.; Bock, H.; Meyer, U.; Beutler, G.; van den Ijssel, J. Swarm kinematic orbits and gravity fields from 18 months of GPS data. Adv. Space Res. 2015, 57, 218–233. [Google Scholar] [CrossRef]
- Van den IJssel, J.; Encarnacão, J.; Doornbos, E.; Visser, P. Precise science orbits for the Swarm satellite constellation. Adv. Space Res. 2015, 56, 1042–1055. [Google Scholar] [CrossRef]
- Kuang, D.; Bar-Sever, Y.; Bertiger, W.; Desai, S.; Haines, B.; Iijima, B.; Kruizinga, G.; Meehan, T.; Romans, L. Precision Orbit Determination for CHAMP Using GPS Data from Black Jack Receiver. In Proceedings of the 2001 National Technical Meeting of the Institute of Navigation, Long Beach, CA, USA, 22–24 January 2001; pp. 762–770.
- Kang, Z.; Nagel, P.; Pastor, R. Precise orbit determination for GRACE. Adv. Space Res. 2003, 31, 1875–1881. [Google Scholar] [CrossRef]
- Boomkamp, H.; Koenig, R. Bigger, Better, Faster POD. In 2004 Berne Workshop and Symposium; Astronomical Institute, University of Berne: Berne, Switzerland, 2005. [Google Scholar]
- Zhu, S.; Reigber, C.; König, R. Integrated adjustment of CHAMP, GRACE and GPS data. J. Geod. 2004, 78, 103–108. [Google Scholar] [CrossRef]
- Kang, Z.; Schwintzer, P.; Reigber, C.; Zhu, S.Y. Precise orbit determination for TOPEX/Poseidon using GPS-SST data. Adv. Space Res. 1995, 16, 59–62. [Google Scholar] [CrossRef]
- Van den Ljssel, J.; Visser, P.; Patiño Rodriguez, E. Champ precise orbit determination using GPS data. Adv. Space Res. 2003, 31, 1889–1895. [Google Scholar]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geod. 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Jäggi, A.; Hugentobler, U.; Bock, H.; Beutler, G. Precise orbit determination for GRACE using undifferenced or doubly differenced GPS data. Adv. Space Res. 2007, 39, 1612–1619. [Google Scholar] [CrossRef]
- Svehla, D.; Rothacher, M. Kinematic and reduced-dynamic precise orbit determination of low Earth orbiters. Adv. Geosci. 2003, 1, 47–56. [Google Scholar] [CrossRef]
- Bock, H.; Hugentobler, U.; Springer, T.; Beutler, G. Efficient precise orbit determination of LEO satellites using GPS. Adv. Space Res. 2002, 30, 295–300. [Google Scholar] [CrossRef]
- Bock, H.; Jäggi, A.; Beutler, G.; Meyer, U. GOCE: Precise orbit determination for the entire mission. J. Geod. 2014, 88, 1047–1060. [Google Scholar] [CrossRef]
- Zangerl, F.; Griesauer, F.; Sust, M.; Montenbruck, O.; Buchert, B.; Garcia, A. SWARM GPS Precise Orbit Determination Receiver Initial in-Orbit Performance Evaluation. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+), Tampa, FL, USA, 8–12 September 2014; pp. 1459–1468.
- Förste, C.; Bruinsma, S.L. EIGEN-6S4: A Time-Variable Satellite-Only Gravity Field Model to d/o 300 Based on LAGEOS, GRACE and GOCE Data from the Collaboration of GFZ Potsdam and GRGS Toulouse. Available online: http://doi.org/10.5880/icgem.2016.008 (accessed on 10 August 2016).
- Olsen, N.; Friis-Christensen, E.; Floberghagen, R.; Alken, P.; Beggan, C.; Chulliat, A.; Doornbos, E.; da Encarnacão, J.T.; Hamilton, B.; Hulot, G.; et al. The Swarm Satellite Constellation Application and Research Facility (SCARF) and Swarm data products. Earth Planets Space 2013, 65, 1189–1200. [Google Scholar] [CrossRef]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Rim, H.; Nagel, P. Precise orbit determination for CHAMP using accelerometer data. Adv. Astronaut. Sci. 2002, 112, 1405–1410. [Google Scholar]
- Peng, D.J.; Wu, B. Precise orbit determination for Jason-1 satellite using on-board GPS data with cm-level accuracy. Chin. Sci. Bull. 2009, 54, 196–202. [Google Scholar] [CrossRef]
- Švehla, D.; Rothacher, M. Kinematic positioning of LEO and GPS satellites and IGS stations on the ground. Adv. Space Res. 2005, 36, 376–381. [Google Scholar] [CrossRef]
- Wu, S.C.; Yunck, T.P.; Thornton, C.L. Reduced-dynamic technique for precise orbit determination of low earth satellites. J. Guid. 1991, 14, 24–30. [Google Scholar] [CrossRef]
- Jäggi, A.; Hugentobler, U.; Beutler, G. Pseudo-stochastic orbit modeling technique for low Earth orbiters. J. Geod. 2006, 80, 47–60. [Google Scholar] [CrossRef]
- Montenbruck, O.; van Helleputte, T.; Kroes, R.; Gill, E. Reduced dynamic orbit determination using GPS code and carrier measurements. Aerosp. Sci. Technol. 2005, 9, 261–271. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Hugentobler, U.; Mervart, L. Efficient satellite orbit modeling using pseudo-stochastic parameters. J. Geod. 2006, 80, 353–372. [Google Scholar] [CrossRef]
- Beutler, G. Methods of Celestial Mechanics; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2004. [Google Scholar]
- Peng, D.J.; Wu, B. Zero-difference and single-difference precise orbit determination for LEO using GPS. Chin. Sci. Bull. 2007, 52, 2024–2031. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Mervart, L.; Meyer, U. The celestial mechanics approach: Theoretical foundations. J. Geod. 2010, 84, 605–624. [Google Scholar] [CrossRef]
- Standish, E.M. JPL Planetary and Lunar Ephemerides, DE405/LE405; JPL IOM 312.F-98-048; JPL: Pasadena, CA, USA, 1998. [Google Scholar]
- Petit, G.; Luzum, B. IERS Conventions 2010; IERS Technical Note; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Bock, H.; Dach, R.; Jäggi, A.; Beutler, G. High-rate GPS clock corrections from CODE: Support of 1 Hz applications. J. Geod. 2009, 83, 1083–1094. [Google Scholar] [CrossRef]
- Dach, R.; Brockmann, E.; Schaer, S.; Beutler, G.; Meindl, M.; Prange, L.; Bock, H.; Jäggi, A.; Ostini, L. GNSS processing at CODE: Status report. J. Geod. 2009, 83, 353–365. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; User Manual; Astronomical Institute, University of Bern, Bern Open Publishing: Bern, Switzerland, 2015. [Google Scholar]
- Švehla, D.; Rothacher, M. EGS-AGU-EUG Nice Kinematic and Reduced-Dynamic Precise Orbit Determination of CHAMP Satellite over One Year Using Space-Borne GPS Phase Zero-Differences Only; EGS-AGU-EUG Joint Assembly: Nice, France, 2003. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Description |
|---|---|
| Force models | |
| Mean Earth gravity | EIGEN-6S4 (European Improved Gravity model of the Earth by New techniques) [16] |
| N-body | JPL DE405(Jet Propulsion Laboratory Solar System Ephemeris) [28] |
| Relativity | IERS 2010 (International Earth Rotation Service 2010) [29] |
| Solid-earth tides | IERS 2010 [29] |
| Ocean tides | FES2004(Modelling the global ocean tides: modern insights from FES2004) [30] |
| GPS observation models | |
| Space-borne GPS data | code and phase observation, 10 s sampling interval |
| GPS orbits | Center for Orbit Determination in Europe (CODE) final GPS precise orbit, 15 min sampling interval |
| GPS clock | CODE final precise clock, 5 s sampling interval |
| GPS phase model | igs08.atx |
| Elevation cut-off | 3° |
| Estimated parameters | |
| Six initial conditions | |
| Swarm clock bias | Bias epoch-wise |
| Ambiguity parameter | ZD ambiguity estimation |
| Pseudo-stochastic pulses | time interval and a priori standard deviation (STD) |
| Satellite | Mean RMS Values of GPS Phase Residuals (mm) |
|---|---|
| Swarm-A | 10.6 |
| Swarm-B | 9.4 |
| Swarm-C | 10.5 |
| Satellite | Mean RMS Values of Orbit Differences (cm) | |||
|---|---|---|---|---|
| R | T | N | 3D | |
| Swarm-A | 2.81 | 2.64 | 3.20 | 5.03 |
| Swarm-B | 2.08 | 2.16 | 2.44 | 3.87 |
| Swarm-C | 2.94 | 2.95 | 3.08 | 5.20 |
| Satellite | Number of SLR Station | Number of Normal Point | Mean (cm) | RMS (cm) |
|---|---|---|---|---|
| Swarm-A | 10 | 1023 | 0.05 | 3.3 |
| Swarm-B | 15 | 3438 | −0.01 | 2.7 |
| Swarm-C | 12 | 1045 | 0.14 | 3.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Wang, Z.; Zhou, L.; Feng, J.; Qiu, Y.; Li, F. Precise Orbit Solution for Swarm Using Space-Borne GPS Data and Optimized Pseudo-Stochastic Pulses. Sensors 2017, 17, 635. https://doi.org/10.3390/s17030635
Zhang B, Wang Z, Zhou L, Feng J, Qiu Y, Li F. Precise Orbit Solution for Swarm Using Space-Borne GPS Data and Optimized Pseudo-Stochastic Pulses. Sensors. 2017; 17(3):635. https://doi.org/10.3390/s17030635
Chicago/Turabian StyleZhang, Bingbing, Zhengtao Wang, Lv Zhou, Jiandi Feng, Yaodong Qiu, and Fupeng Li. 2017. "Precise Orbit Solution for Swarm Using Space-Borne GPS Data and Optimized Pseudo-Stochastic Pulses" Sensors 17, no. 3: 635. https://doi.org/10.3390/s17030635
APA StyleZhang, B., Wang, Z., Zhou, L., Feng, J., Qiu, Y., & Li, F. (2017). Precise Orbit Solution for Swarm Using Space-Borne GPS Data and Optimized Pseudo-Stochastic Pulses. Sensors, 17(3), 635. https://doi.org/10.3390/s17030635