
An IoT Reader for Wireless Passive Electromagnetic Sensors

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
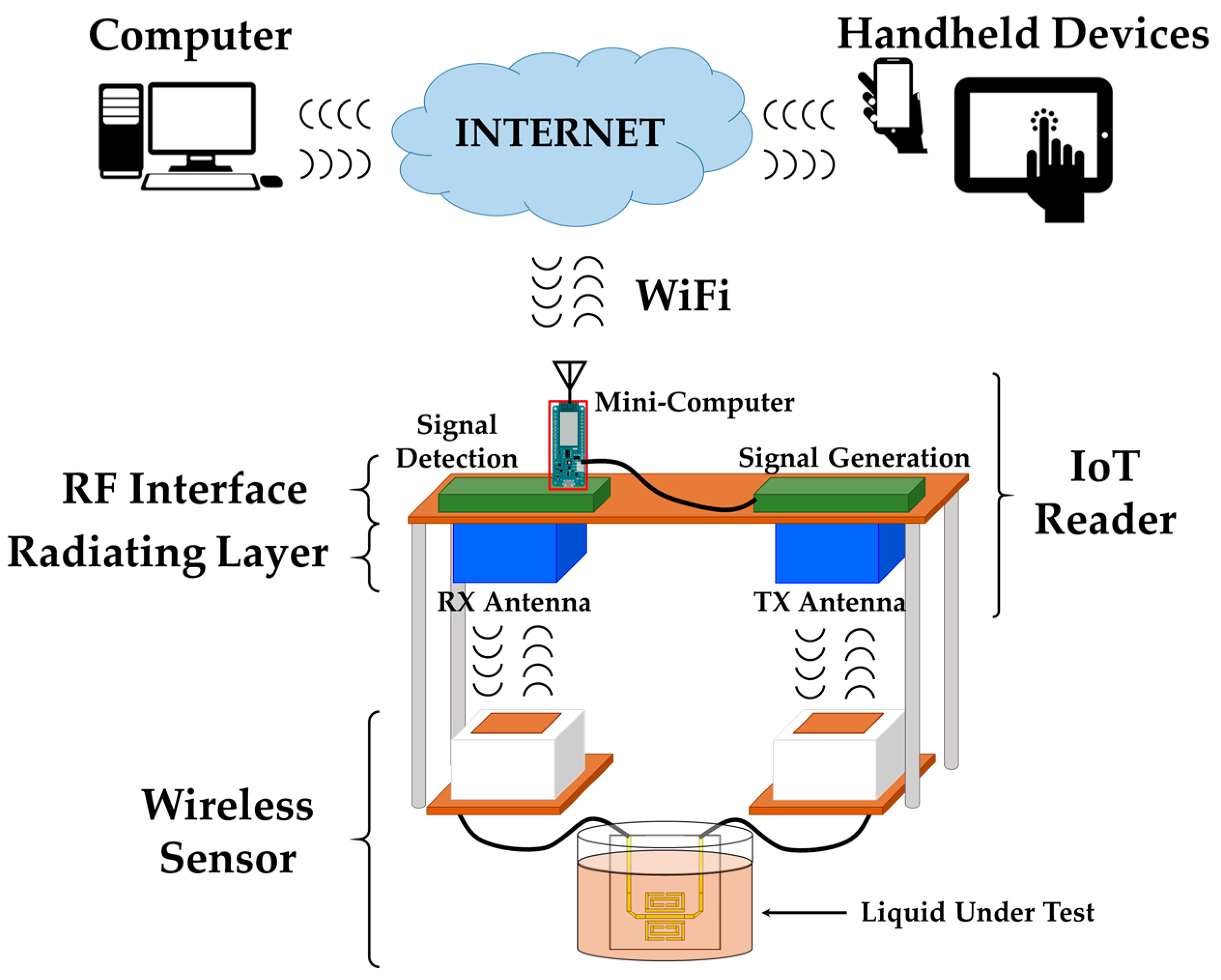
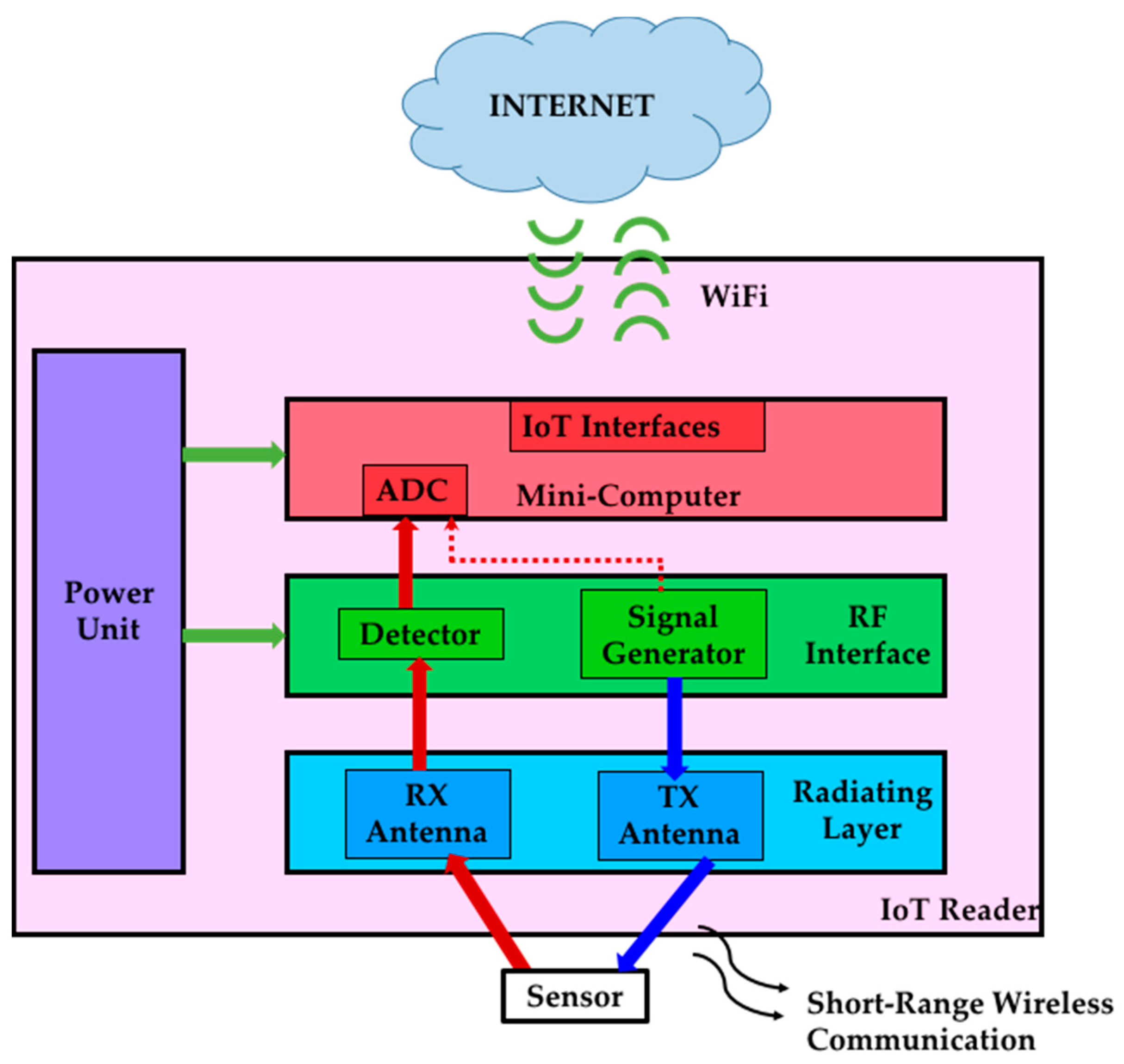
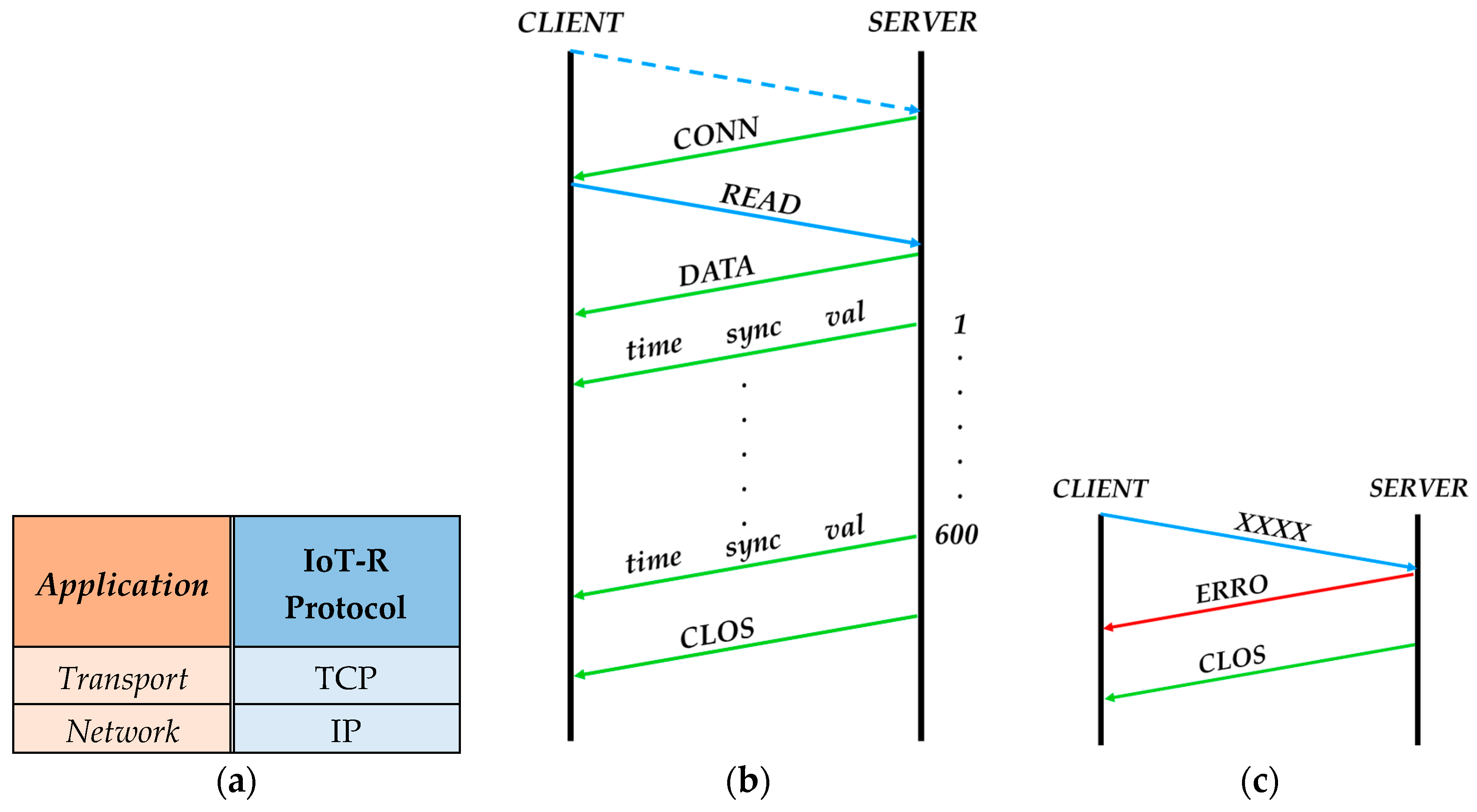
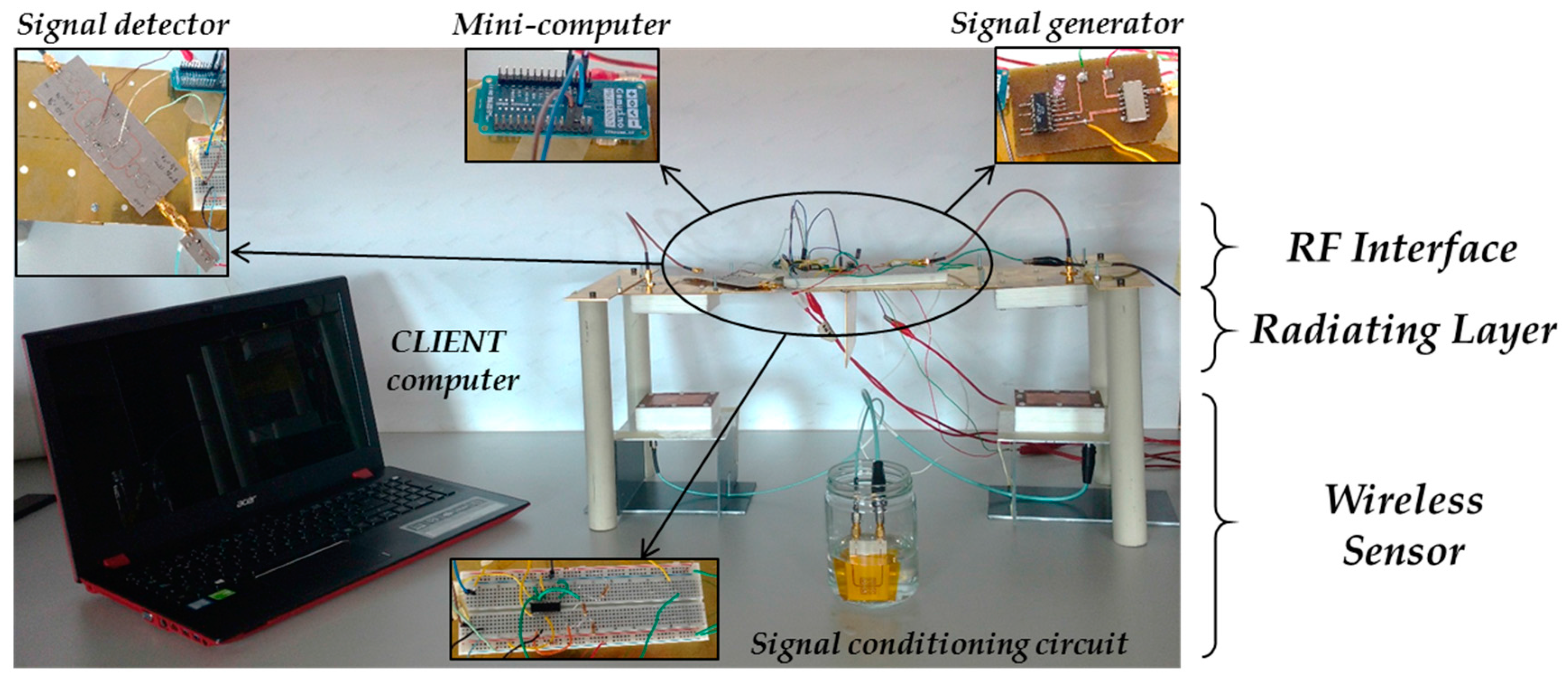
2.1. Sensing System and IoT Reader Definitions
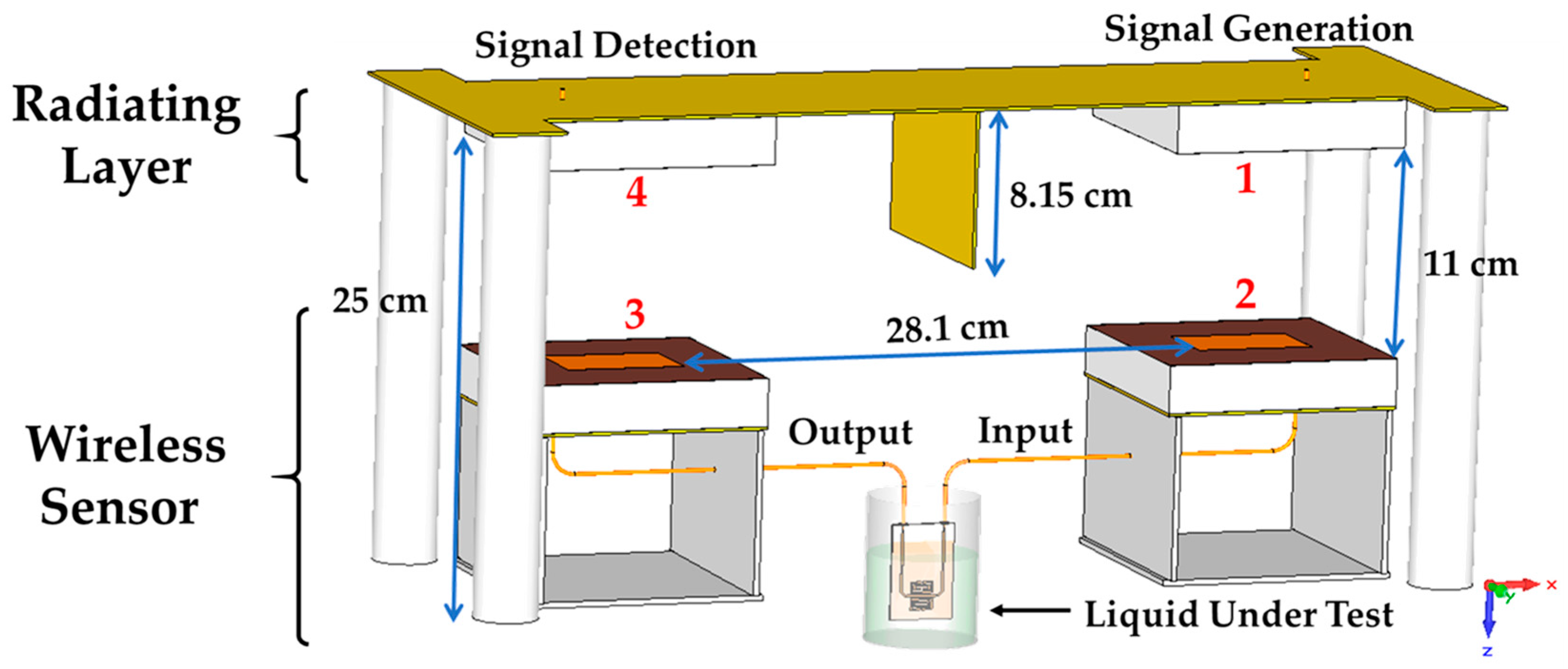
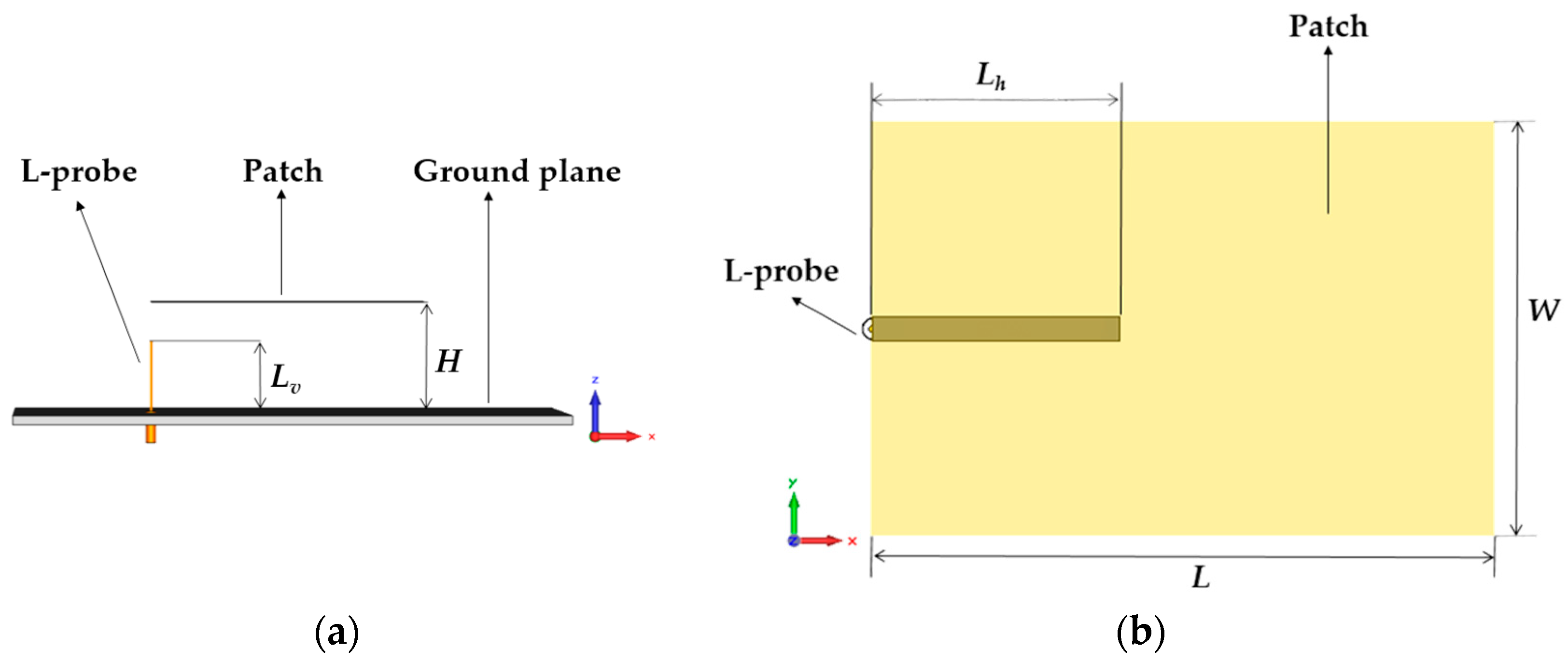
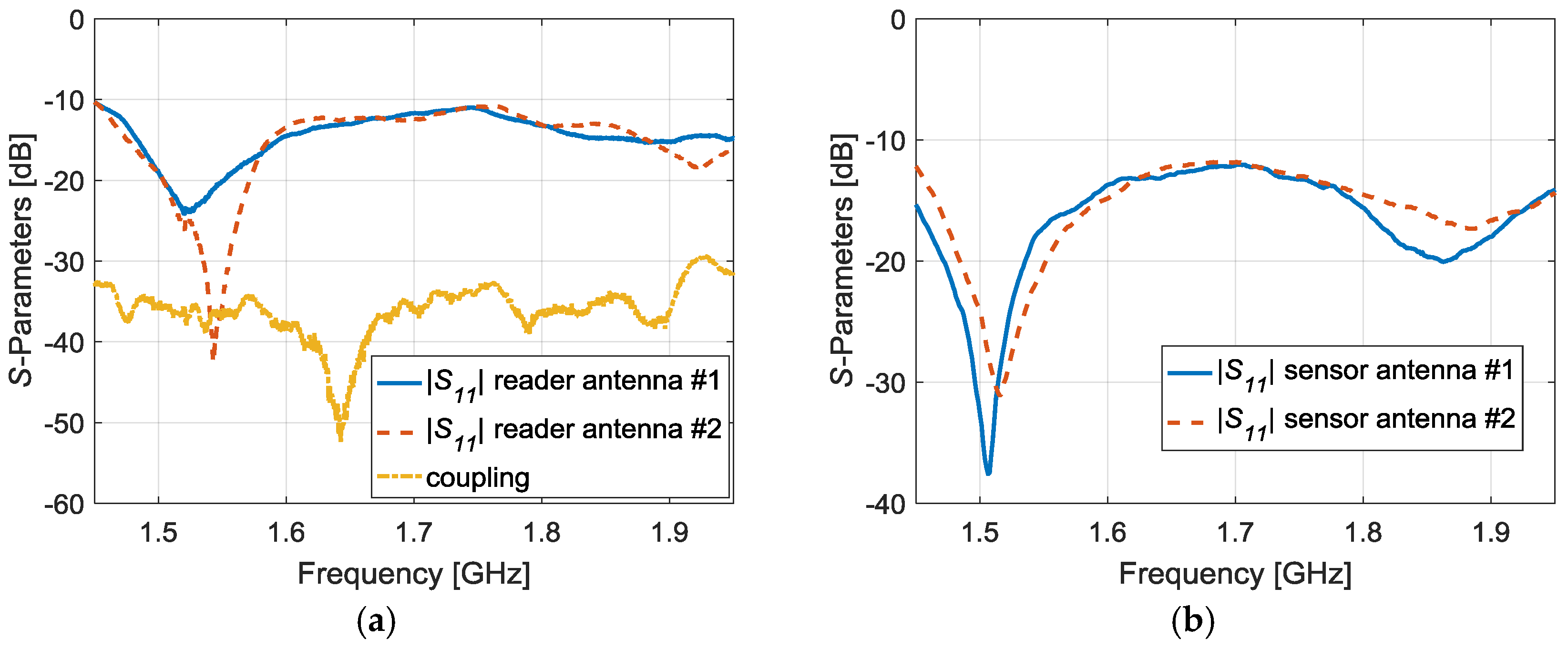
2.2. Radiating Layer
2.3. RF Interface
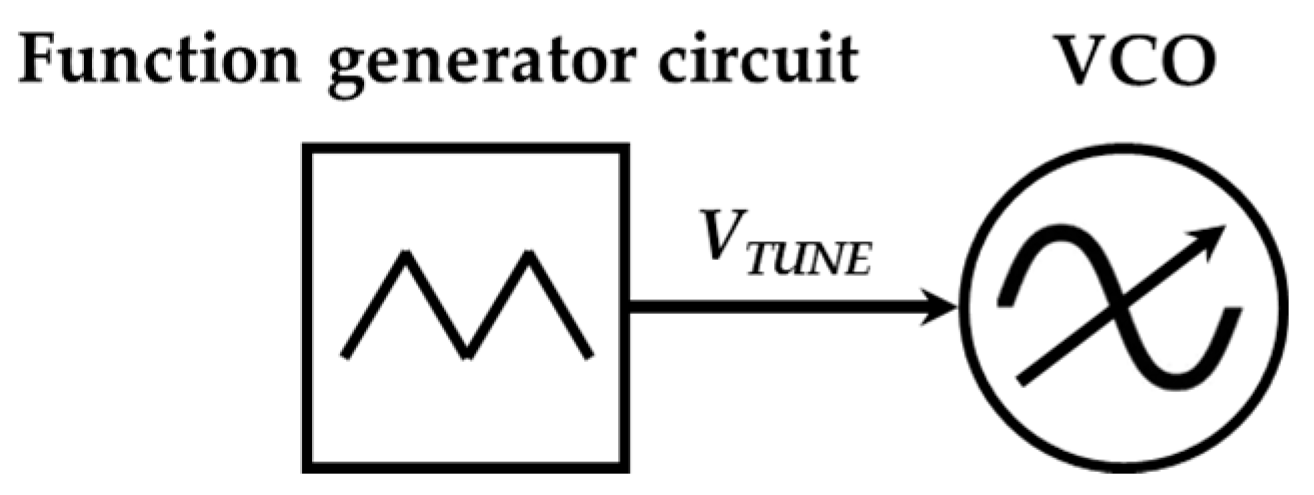
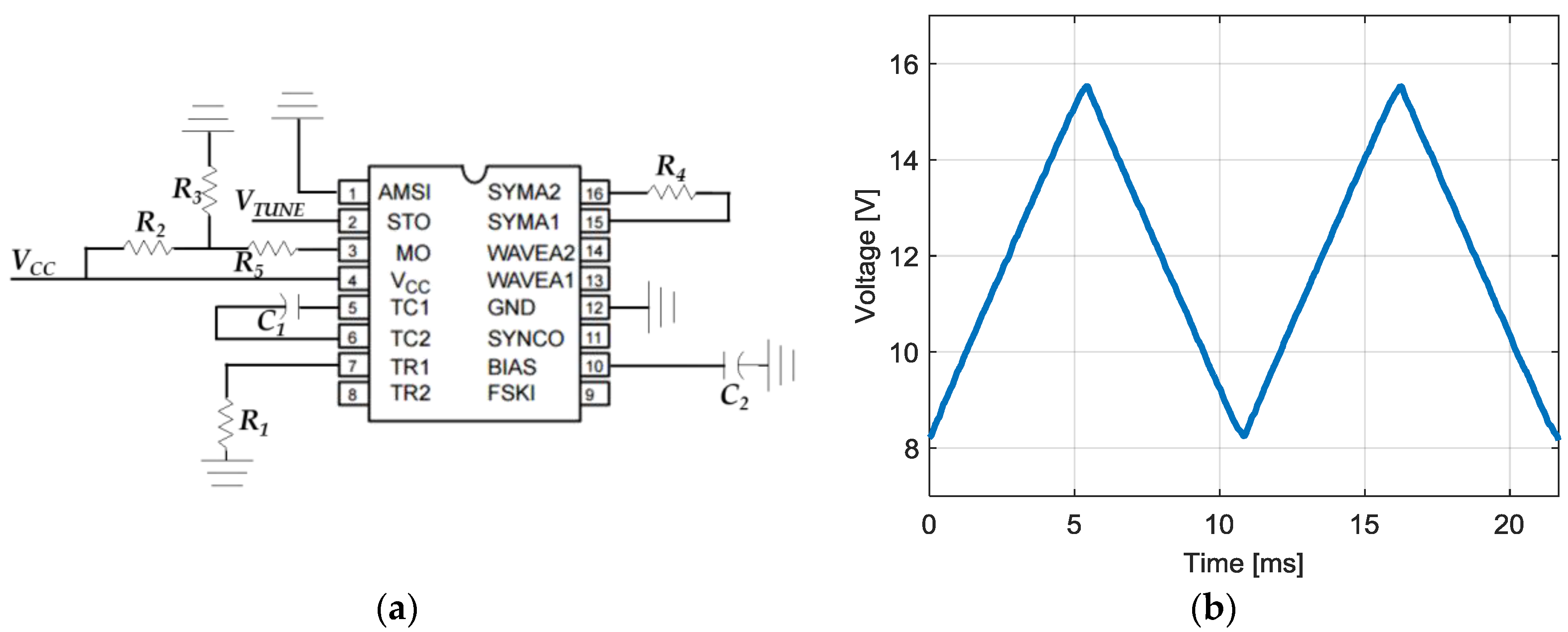
2.3.1. Signal Generator
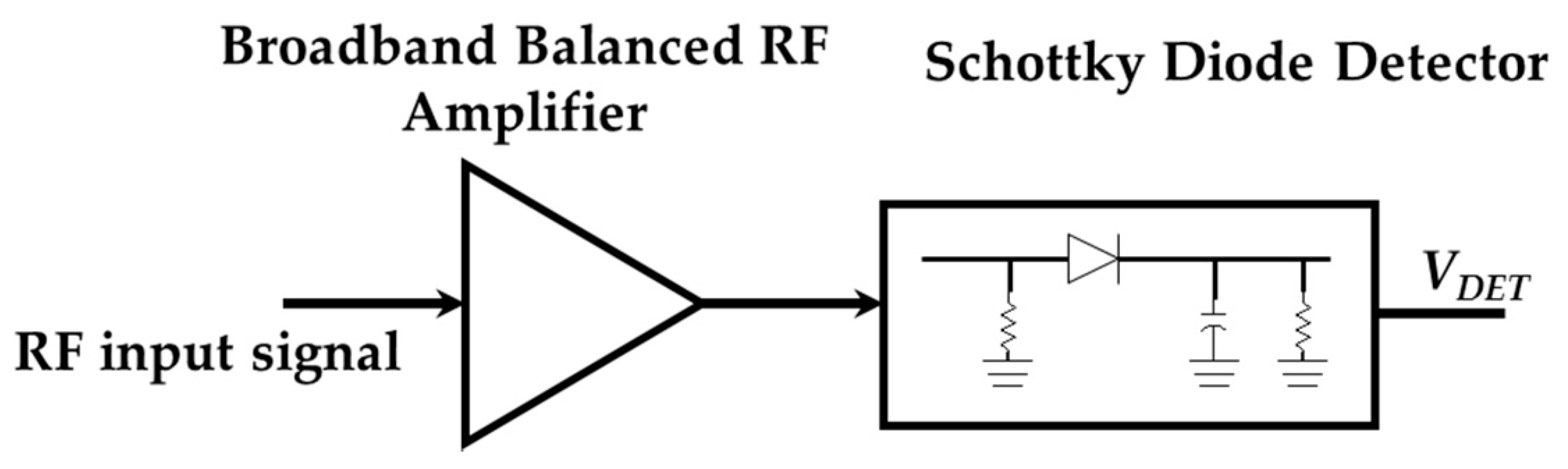
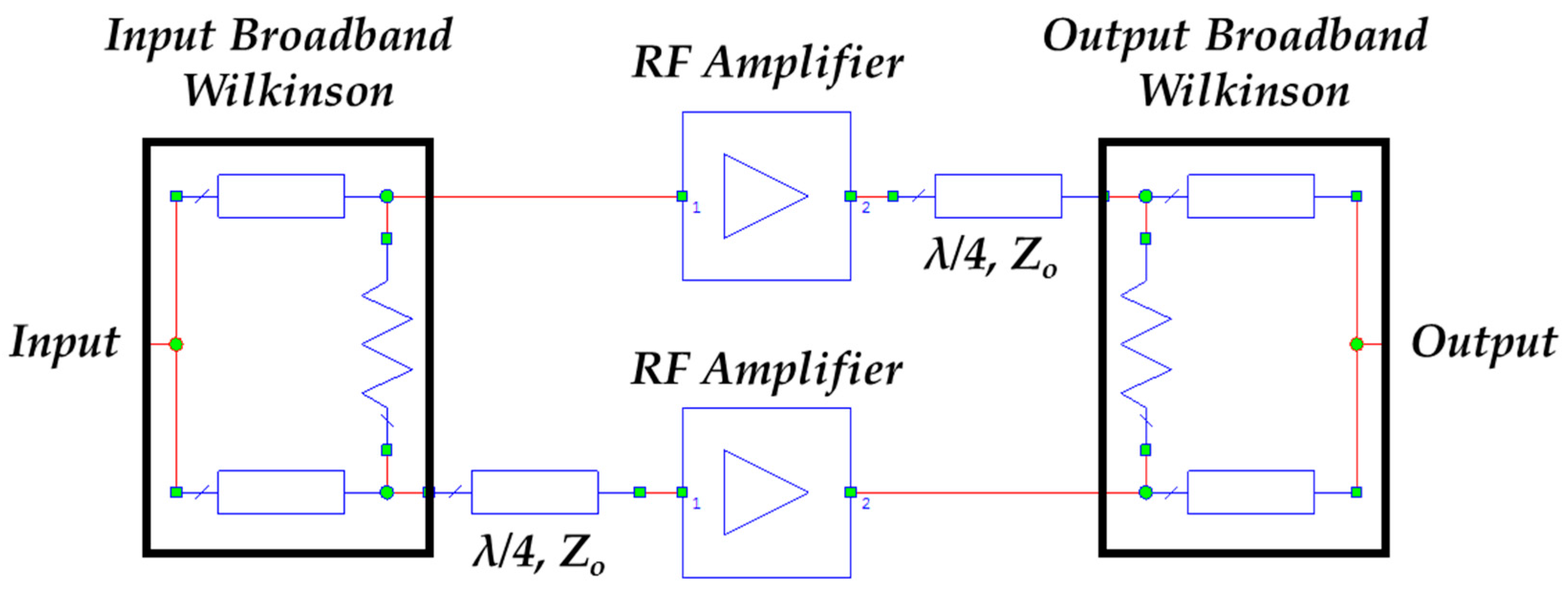
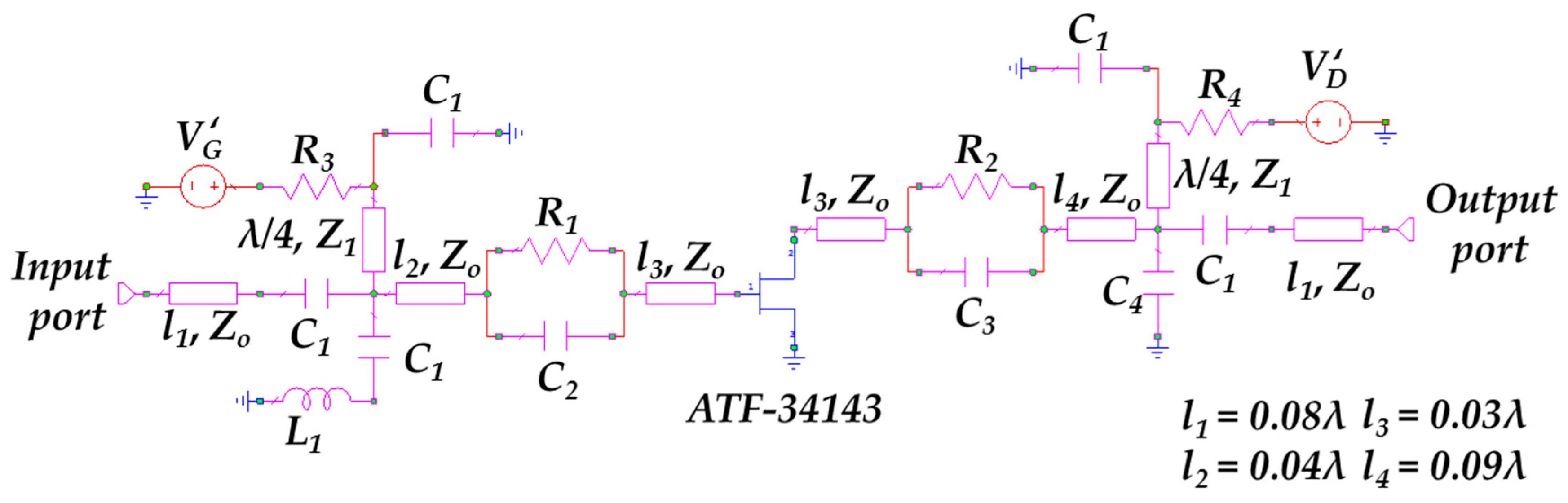
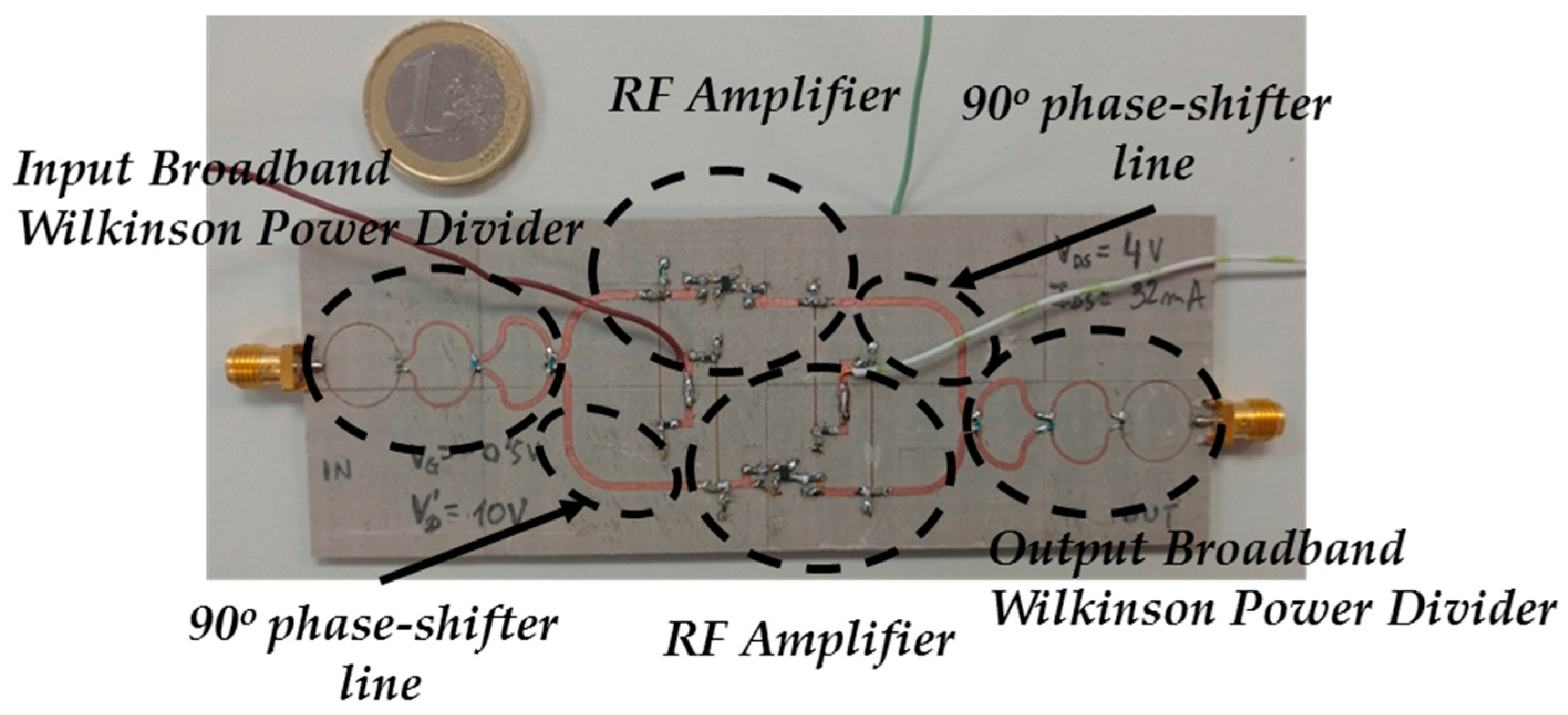
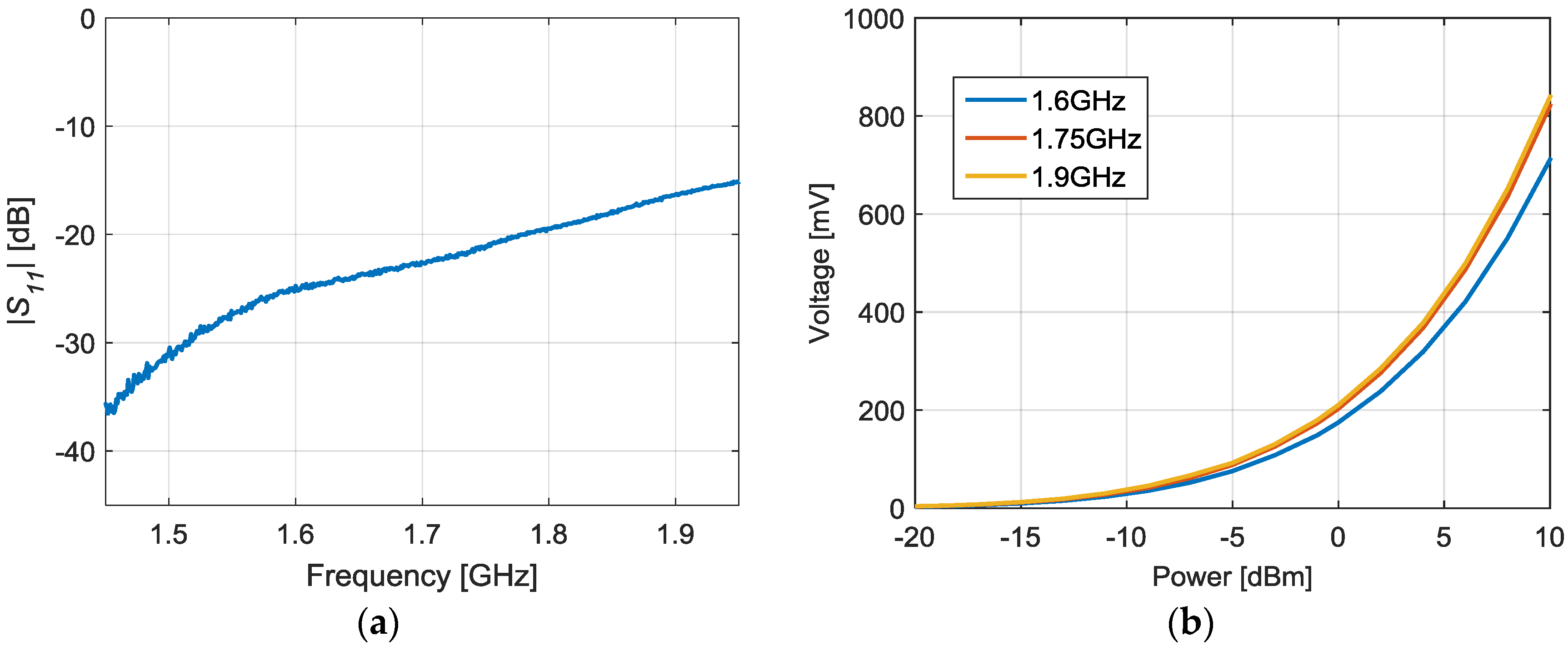
2.3.2. Signal Detector
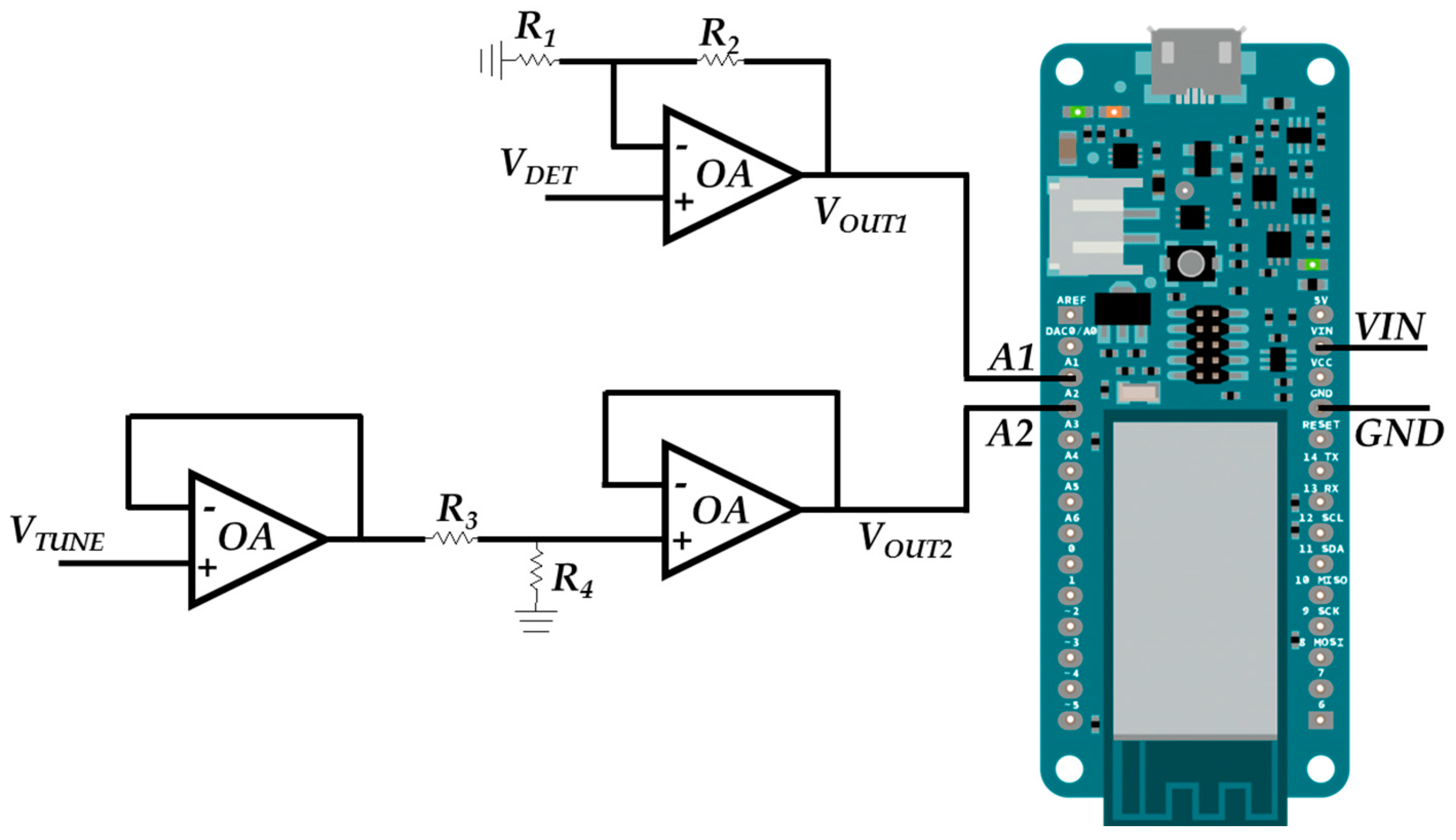
2.4. IoT Mini-Computer Layer
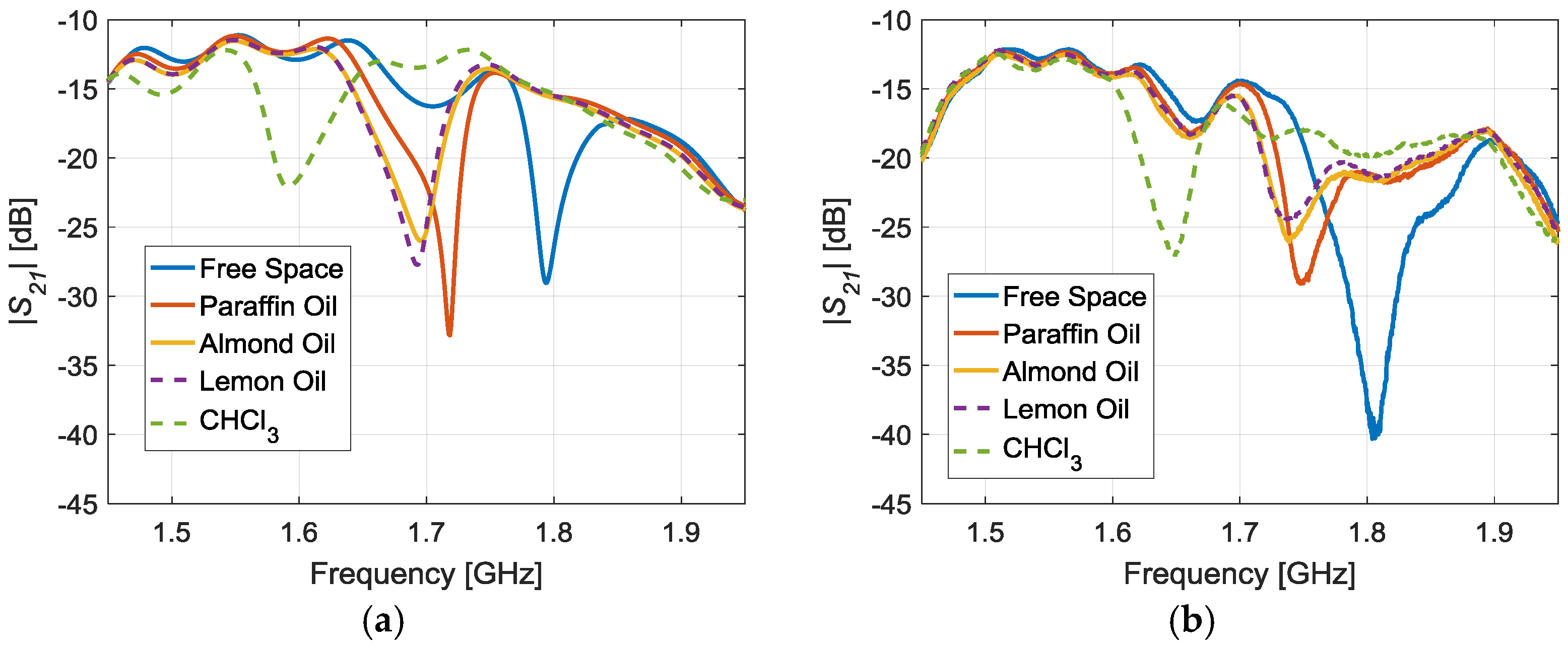
3. Results
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Gregory, A.P.; Clarke, R.N. A review of RF and microwave techniques for dielectric measurements on polar liquids. IEEE Trans. Dielectr. Electr. Insul. 2006, 13, 727–743. [Google Scholar] [CrossRef]
- Nor, A.S.M.; Yunus, M.A.; Nawawi, S.W.; Ibrahim, S. Low-cost sensor array design optimization based on planar electromagnetic sensor design for detecting nitrate and sulphate. In Proceedings of the 2013 Seventh International Conference on Sensing Technology (ICST), Wellington, New Zealand, 3–5 December 2013. [Google Scholar]
- Schüßler, M.; Mandel, C.; Puentes, M.; Jakoby, R. Metamaterial inspired microwave sensors. IEEE Microw. Mag. 2012, 13, 57–68. [Google Scholar] [CrossRef]
- Chen, T.; Li, S.; Sun, H. Metamaterials application in sensing. IEEE Sens. 2012, 12, 2742–2765. [Google Scholar] [CrossRef] [PubMed]
- Huang, H. Flexible Wireless Antenna Sensor: A Review. IEEE Sens. J. 2013, 13, 3865–3872. [Google Scholar] [CrossRef]
- Yao, J.; Tjuatja, S.; Huang, H. Real-time vibratory strain sensing using passive wireless antenna sensor. IEEE Sens. J. 2015, 15, 4338–4345. [Google Scholar] [CrossRef]
- Finkenzeller, K. RFID Handbook: Fundamentals and Application in Contactless Smart Cards and Identification; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar]
- Vyas, R.; Lakafosis, V.; Lee, H.; Shaker, G.; Yang, L.; Orecchini, G.; Traille, A.; Tentzeris, M.; Roselli, L. Inkjet printed, self powered, wireless sensors for environmental, gas, and authentication-based sensing. IEEE Sens. J. 2011, 11, 3139–3152. [Google Scholar] [CrossRef]
- Lu, M.; Goldsmith, C.; Cauller, L.; Lee, J. MEMS-Based Inductively Coupled RFID Transponder for Implantable Wireless Sensor Applications. IEEE Trans. Magn. 2007, 43, 2412–2414. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, G.Y. UHF RFID Tag Antenna-Based Sensing for Corrosion Detection & Characterization Using Principal Component Analysis. IEEE Trans. Antennas Propag. 2016, 64, 4405–4414. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Zhao, A.B. Passive RFID sensor systems for crack detection & characterization. NDT E Int. 2017, 86, 89–99. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Marindra, A.M.J.; Sunny, A.I.; Zhao, A.B. A review of Passive RFID Tag Antenna-Based Sensors and Systems for Structural Health Monitoring Applications. Sensors 2017, 17, 265. [Google Scholar] [CrossRef] [PubMed]
- Pardo, D.; Vaz, A.; Gil, S.; Gomez, J.; Ubarretxena, A.; Puente, D.; Morales-Ramos, R.; Garcia-Alonso, A.; Berenguer, R. Design Criteria for Full Passive Long Range UHF RFID Sensor for Human Body Temperature Monitoring. In Proceedings of the 2007 IEEE International Conference on RFID, Grapevine, TX, USA, 26–28 March 2017. [Google Scholar]
- Preradovic, S.; Karmakar, N.C. Chipless RFID: Bar Code of the Future. IEEE Microw. Mag. 2010, 11, 87–97. [Google Scholar] [CrossRef]
- Amin, E.M.; Karmakar, N.C. Development of a chipless RFID temperature sensor using cascaded spiral resonators. Proc. IEEE Sens. 2011, 2011, 554–557. [Google Scholar]
- Shrestha, S.; Balachandran, M.; Agarwal, M.; Phoha, V.; Varahramyan, K. A Chipless RFID Sensor System for Cyber Centric Monitoring Applications. IEEE Trans. Microw. Theory Tech. 2009, 57, 1303–1309. [Google Scholar] [CrossRef]
- Vena, A.; Sydänheimo, L.; Tentzeris, M.; Ukkonen, L. A novel inkjet printed carbon nanotube-based chipless RFID sensor for gas detection. In Proceedings of the 2013 European Microwave Conference (EuMC), Nuremberg, Germany, 6–10 October 2013. [Google Scholar]
- Mandel, C.; Maune, H.; Maasch, M.; Sazegar, M.; Schüßler, M.; Jakoby, R. Passive wireless temperature sensing with BST-based chipless transponder. In Proceedings of the 2011 German Microwave Conference, Darmstadt, Germany, 14–16 March 2011. [Google Scholar]
- ITU-T Y.4000/Y.2060. Overview of the Internet of Things. June 2012. Available online: http://handle.itu.int/11.1002/1000/11559 (accessed on 30 January 2017).
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Arcadius, T.C.; Gao, B.; Tian, G.; Yan, Y. Structural Health Monitoring Framework Based on Internet of Things: A Survey. IEEE Int. Things J. 2017. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Chi, Q.; Yan, H.; Zhang, C.; Pang, Z.; Xu, L.D. A Reconfigurable Smart Sensor Interface for Industrial WSN in IoT Environment. IEEE Trans. Ind. Inform. 2014, 10, 1417–1425. [Google Scholar]
- Sheng, Z.; Mahapatra, C.; Zhu, C.; Leung, V.C.M. Recent Advances in Industrial Wireless Sensor Networks toward Efficient Management in IoT. IEEE Access 2015, 3, 622–637. [Google Scholar] [CrossRef]
- Kelly, S.D.T.; Suryadevara, N.K.; Mukhopadhyay, S.C. Towards the Implementation of IoT for Environmental Condition Monitoring in Homes. IEEE Sens. J. 2013, 13, 3846–3853. [Google Scholar] [CrossRef]
- Istepanian, R.S.H.; Hu, S.; Philip, N.Y.; Sungoor, A. The Potential of Internet of m-health Things “m-IoT” for Non-Invasive Glucose level Sensing. In Proceedings of the 33rd Annual International Conference of the IEEE EMBS, Boston, MA, USA, 30 August–3 September 2011; pp. 5264–5266. [Google Scholar]
- Yang, G.; Xie, L.; Mäntysalo, M.; Zhou, X.; Pang, Z.; Xu, L.D.; Kao-Walter, S.; Chen, Q.; Zheng, L.-R. A Health-IoT Platform Based on the Integration of Intelligent Packaging, Unobtrusive Bio-Sensor, and Intelligent Medicine Box. IEEE Trans. Ind. Inform. 2014, 10, 2180–2191. [Google Scholar] [CrossRef]
- Doukas, C.; Maglogiannis, I. Bringing IoT and Cloud Computing towards Pervasive Healthcare. In Proceedings of the 2012 Sixth International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Palermo, Italy, 4–6 July 2012; pp. 922–926. [Google Scholar]
- Galindo-Romera, G.; Herraiz-Martínez, F.J.; Gil, M.; Martínez-Martínez, J.J.; Segovia-Vargas, D. Submersible Printed Split-Ring Resonator-Based Sensor for Thin-Film Detection and Permittivity Characterization. IEEE Sens. J. 2016, 16, 3587–3596. [Google Scholar] [CrossRef]
- MKR1000 Arduino. Available online: https://www.arduino.cc/en/Main/ArduinoMKR1000 (accessed on 30 January 2017).
- Matlab. Available online: http://www.mathworks.com/ (accessed on 30 January 2017).
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Pozar, D.M. Microwave Engineering; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Hazdra, P.; Mazánek, M.; Cermák, J. Wideband Rectangular Microstrip Patch Antenna Using L-probe Feeding System. Radioengineering 2007, 16, 37–41. [Google Scholar]
- N9918A Vector Network Analyzer. Available online: http://www.keysight.com/en/pdx-x201927-pn-N9918A/fieldfox-handheld-microwave-analyzer-265-ghz?cc=US&lc=eng (accessed on 30 January 2017).
- JTOS-2000+ VCO. Available online: https://www.minicircuits.com/pdfs/JTOS-2000.pdf (accessed on 30 January 2017).
- XR-2206 Monolithic Function Generator Integrated Circuit. Available online: https://www.sparkfun.com/datasheets/Kits/XR2206_104_020808.pdf (accessed on 30 January 2017).
- DSOX3034A Oscilloscope. Available online: http://www.keysight.com/en/pdx-x201847-pn-DSOX3034A/ (accessed on 30 January 2017).
- Guillermo Gonzalez. Microwave Transistor Amplifiers: Analysis and Design; Prentice Hall: Upper Saddle River, NJ, USA, 1997; Volume 2. [Google Scholar]
- ATF-34143 PHEMT Transistor. Available online: https://www.broadcom.com/products/wireless/transistors/fet/atf-34143 (accessed on 30 January 2017).
- HSMS-2850 Schottky Diode. Available online: https://www.broadcom.com/products/wireless/diodes/schottky/hsms-2850 (accessed on 30 January 2017).
- Mass, S.A. The RF and Microwave Circuit Design Cookbook; Artech House: Norwood, MA, USA, 1998. [Google Scholar]
- LM324N Operational Amplifier. Available online: http://www.ti.com/lit/ds/symlink/lm2902-n.pdf (accessed on 30 January 2017).
- LM350AT Regulator. Available online: http://www.ti.com/lit/ds/symlink/lm350a.pdf (accessed on 30 January 2017).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Relative Permittivity (εr) | Resonant Frequency (fr [GHz]) |
|---|---|---|
| Free Space | 1 | 1.804 |
| Paraffin Oil | 2.45 | 1.748 |
| Almond Oil | 2.96 | 1.739 |
| Lemon Oil | 3.03 | 1.737 |
| CHCl3 | 5.77 | 1.649 |
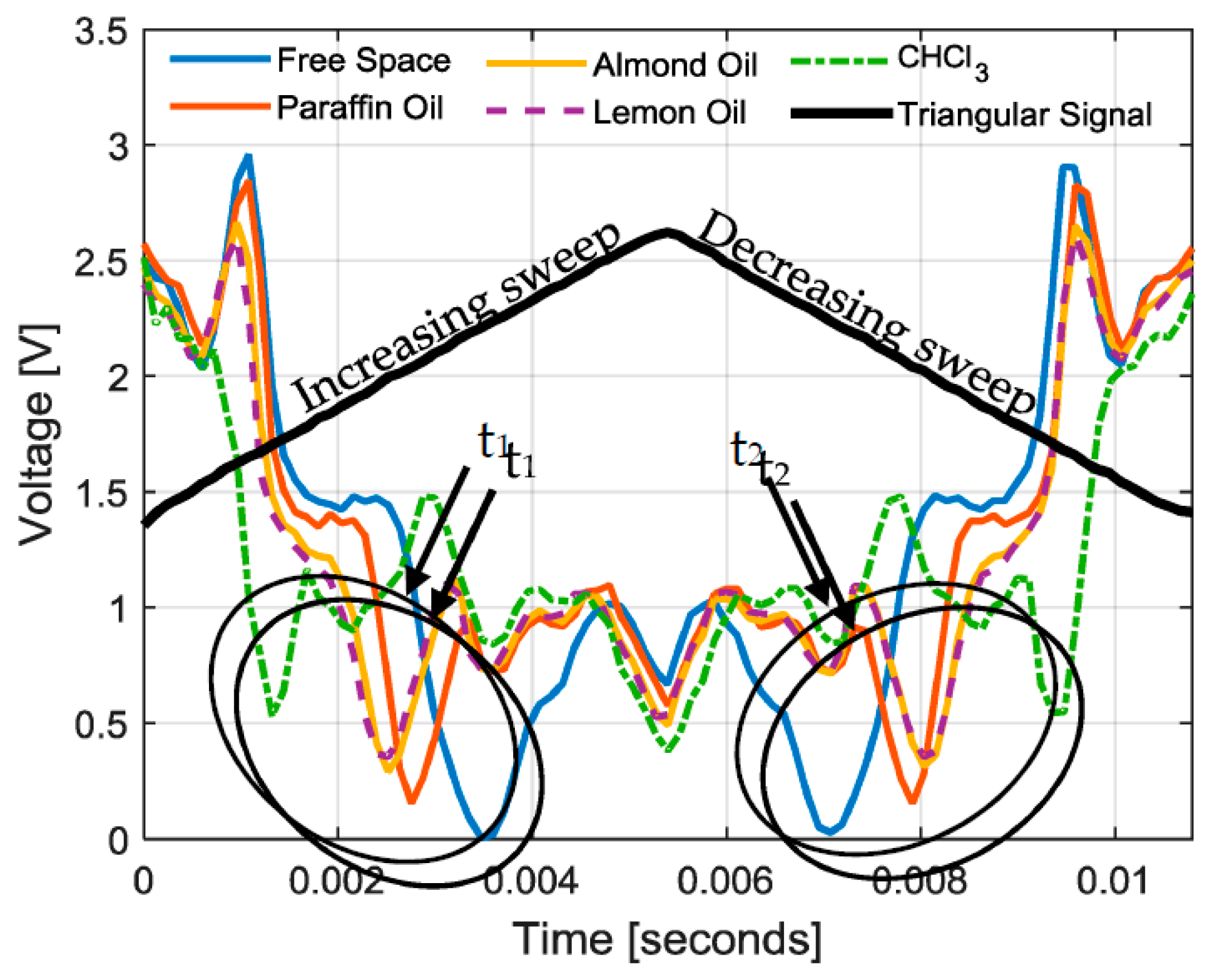
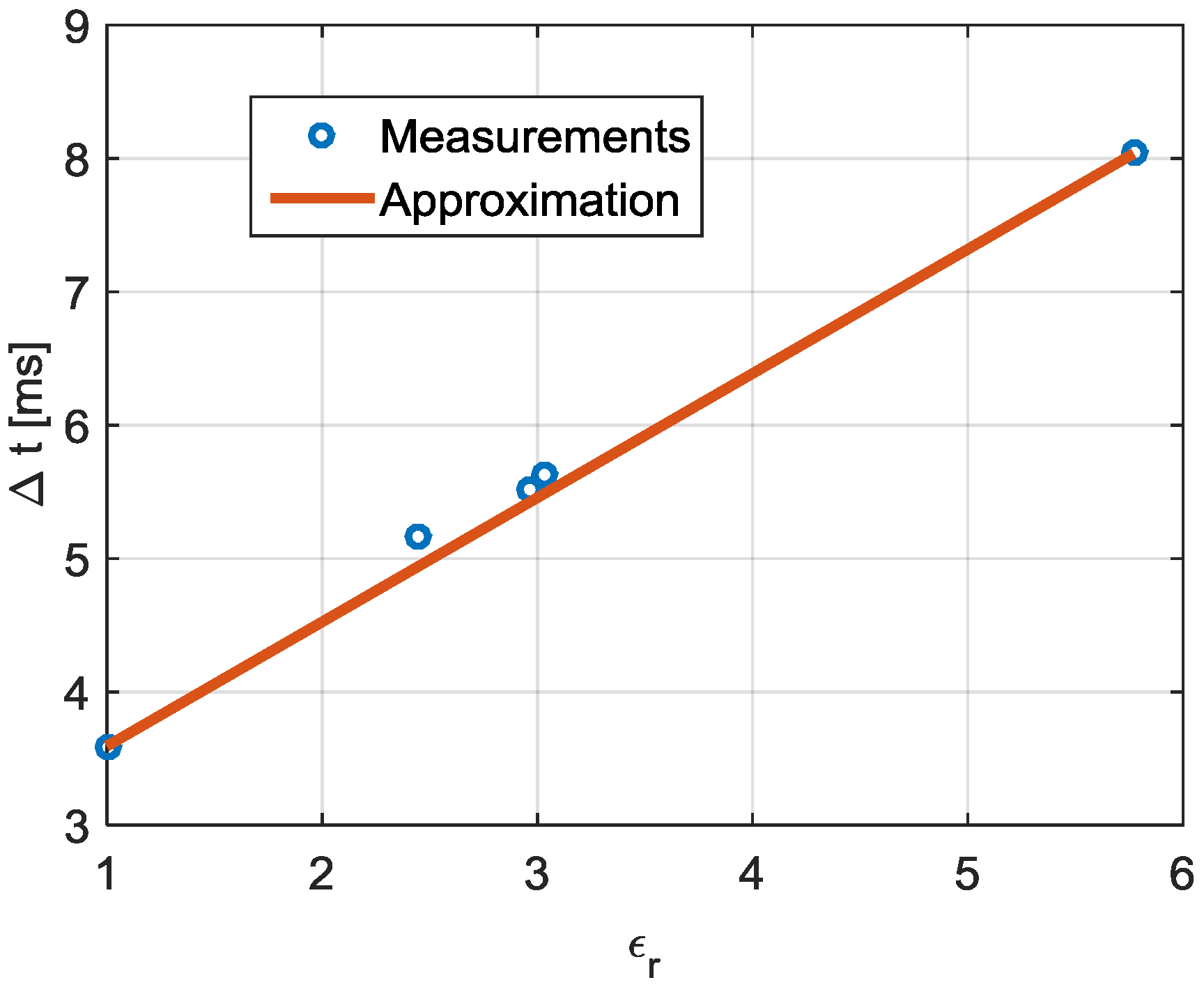
| Material | Relative Permittivity (εr) | t1 [ms] | t2 [ms] | Δt (t1 − t2) [ms] |
|---|---|---|---|---|
| Free Space | 1 | 3.48 | 7.07 | 3.59 |
| Paraffin Oil | 2.45 | 2.76 | 7.91 | 5.16 |
| Almond Oil | 2.96 | 2.52 | 8.03 | 5.51 |
| Lemon Oil | 3.03 | 2.40 | 8.03 | 5.63 |
| CHCl3 | 5.77 | 1.32 | 9.36 | 8.04 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galindo-Romera, G.; Carnerero-Cano, J.; Martínez-Martínez, J.J.; Herraiz-Martínez, F.J. An IoT Reader for Wireless Passive Electromagnetic Sensors. Sensors 2017, 17, 693. https://doi.org/10.3390/s17040693
Galindo-Romera G, Carnerero-Cano J, Martínez-Martínez JJ, Herraiz-Martínez FJ. An IoT Reader for Wireless Passive Electromagnetic Sensors. Sensors. 2017; 17(4):693. https://doi.org/10.3390/s17040693
Chicago/Turabian StyleGalindo-Romera, Gabriel, Javier Carnerero-Cano, José Juan Martínez-Martínez, and Francisco Javier Herraiz-Martínez. 2017. "An IoT Reader for Wireless Passive Electromagnetic Sensors" Sensors 17, no. 4: 693. https://doi.org/10.3390/s17040693
APA StyleGalindo-Romera, G., Carnerero-Cano, J., Martínez-Martínez, J. J., & Herraiz-Martínez, F. J. (2017). An IoT Reader for Wireless Passive Electromagnetic Sensors. Sensors, 17(4), 693. https://doi.org/10.3390/s17040693