A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN


Abstract
:1. Introduction
2. Related Work
3. Turbo RSSI Model-Based Indoor Algorithm for Crowded Scenarios
3.1. RSSI Log-Distance Path Loss Model
- is the RSSI of the transmitter.
- is the distance between the receiver and the transmitter in the meter.
- is known as the decay rate of the received signal level. In the free space, . However, for obstructed paths located indoors, is related to the specific environment.
- is a Gaussian random variation whose mean is in dB. The standard deviation in dB is due to shadow fading, which is determined by the actual measurement results.
- is the signal strength of the receiver.
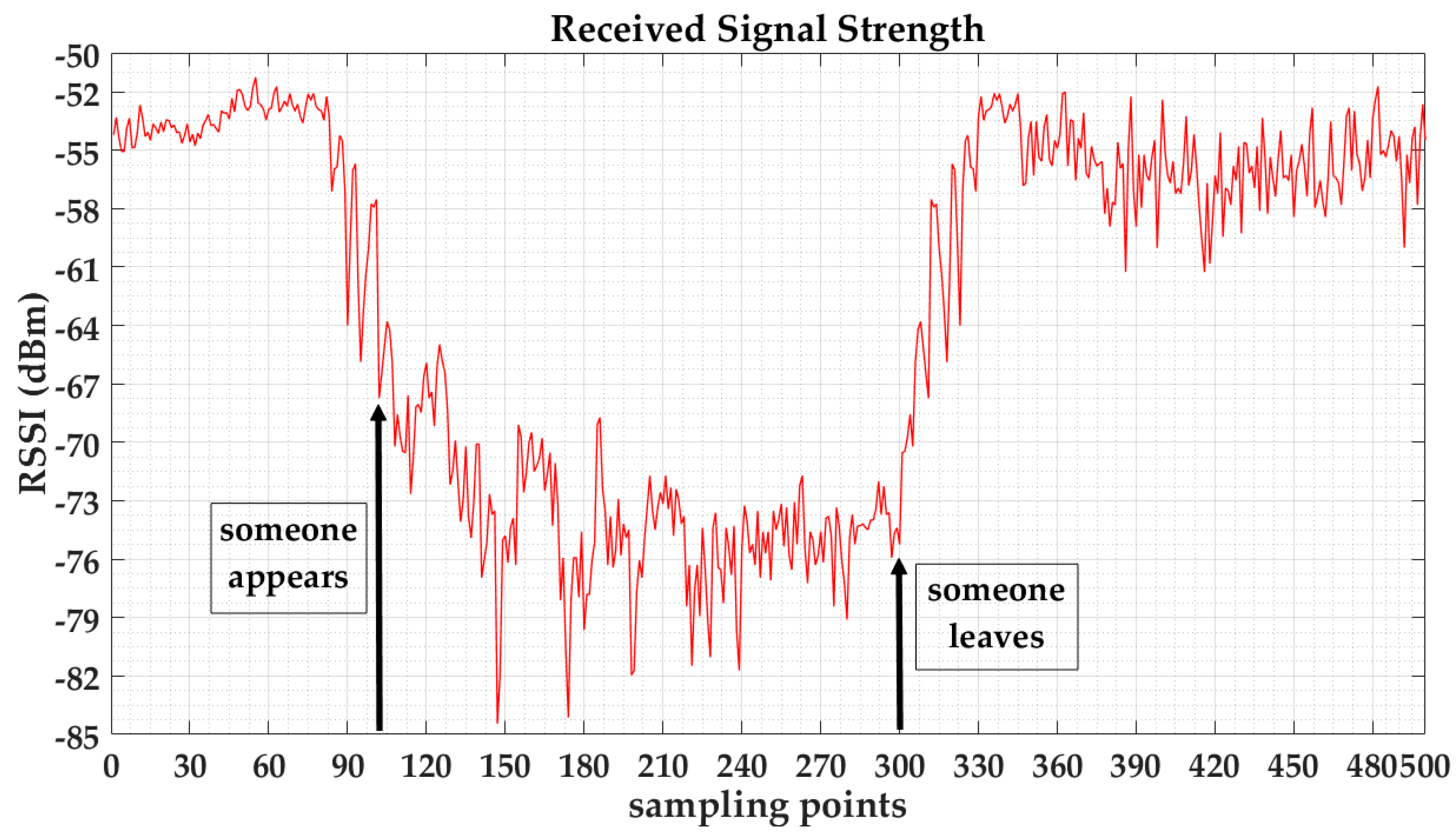
3.2. The Effect of the Human Body
3.3. Human Detection
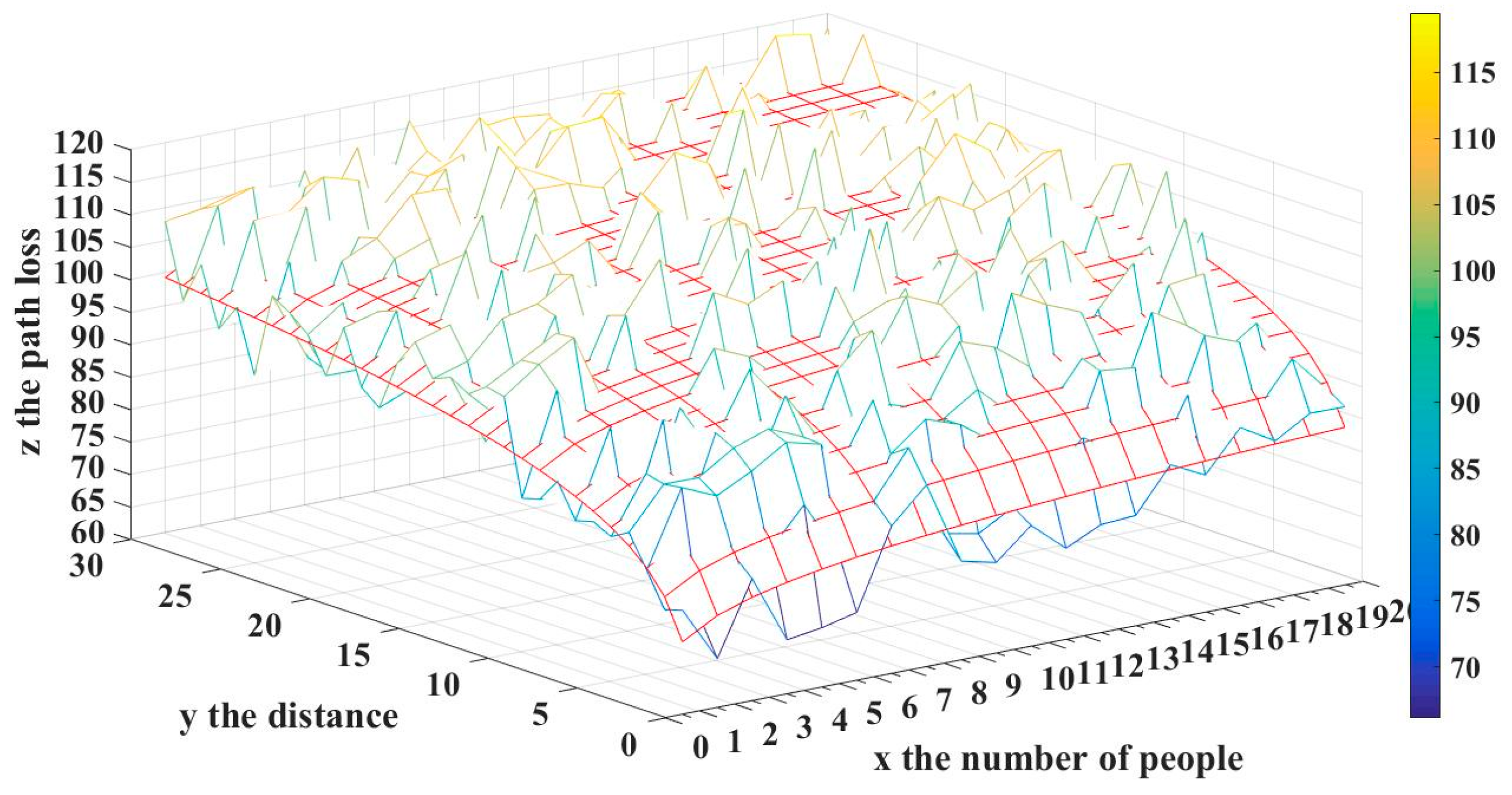
3.4. New Indoor Propagation Model Considering Human Body
- : the transmission power.
- : the strength of the actual received signal in (dBm).
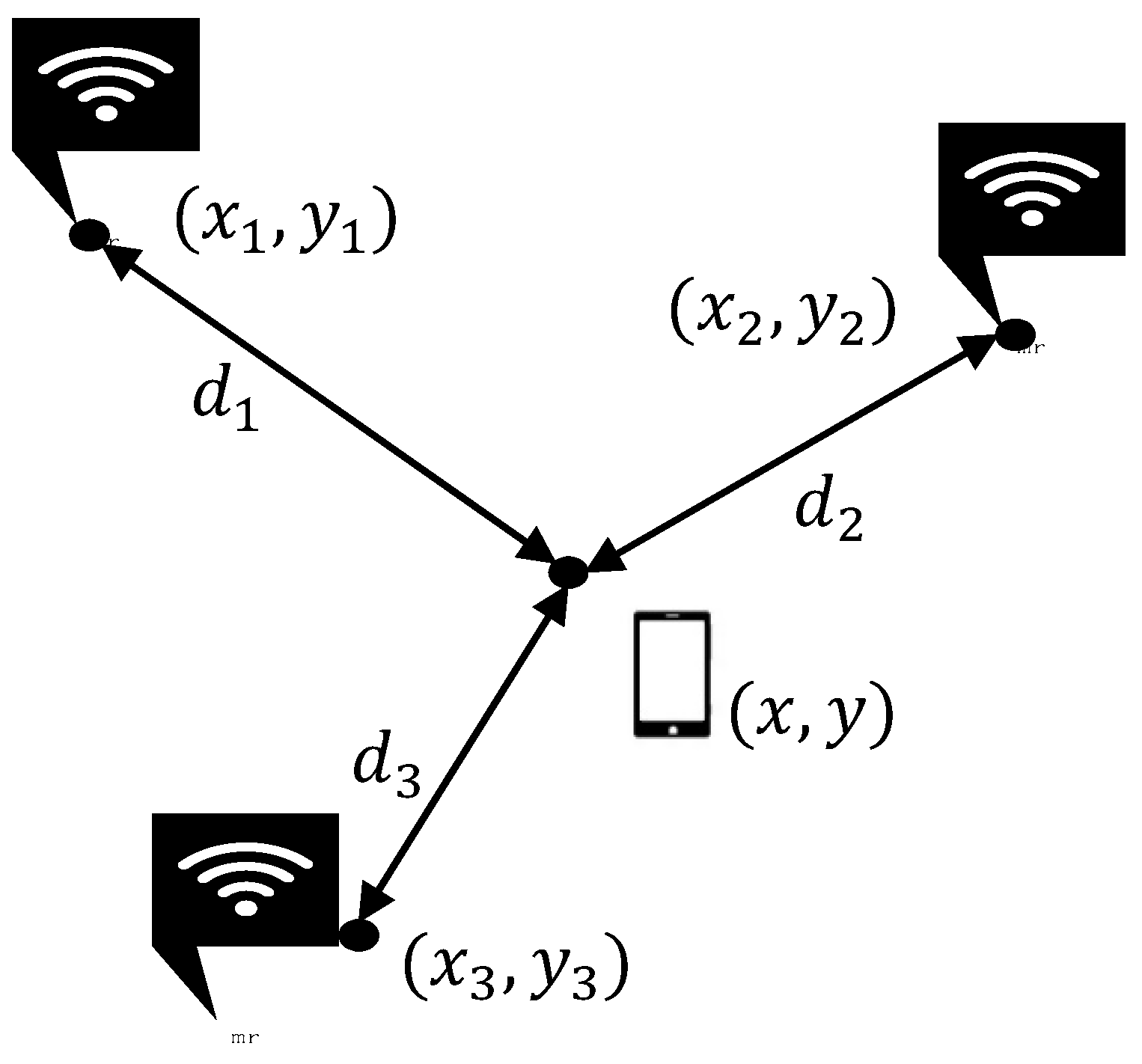
3.5. RSS-Based Positioning
3.6. Steps of Our Indoor Positioning Algorithm
- (1)
- The user takes an indoor image which includes pedestrians, using the camera of a smartphone;
- (2)
- is sent to our GPU server, and the individual number of the is calculated based on FCLN, by using Equation (7). It is worth noting that in our experiment , ;
- (3)
- is sent back to the smartphone;
- (4)
- The WiFi signals from APs are received by the smartphone;
- (5)
- and are introduced in the Equation (14) that runs on the smartphone, which is used to compensate for the signal strength loss . It is noted that the human weight .
- (6)
- is used in the Equation (3), and then the distances are estimated.
- (7)
- D is introduced in the Equation (15), and then the indoor location of a user who takes a smartphone photograph is calculated, for which the accuracy is less than 2 m.
4. Tests and Evaluation
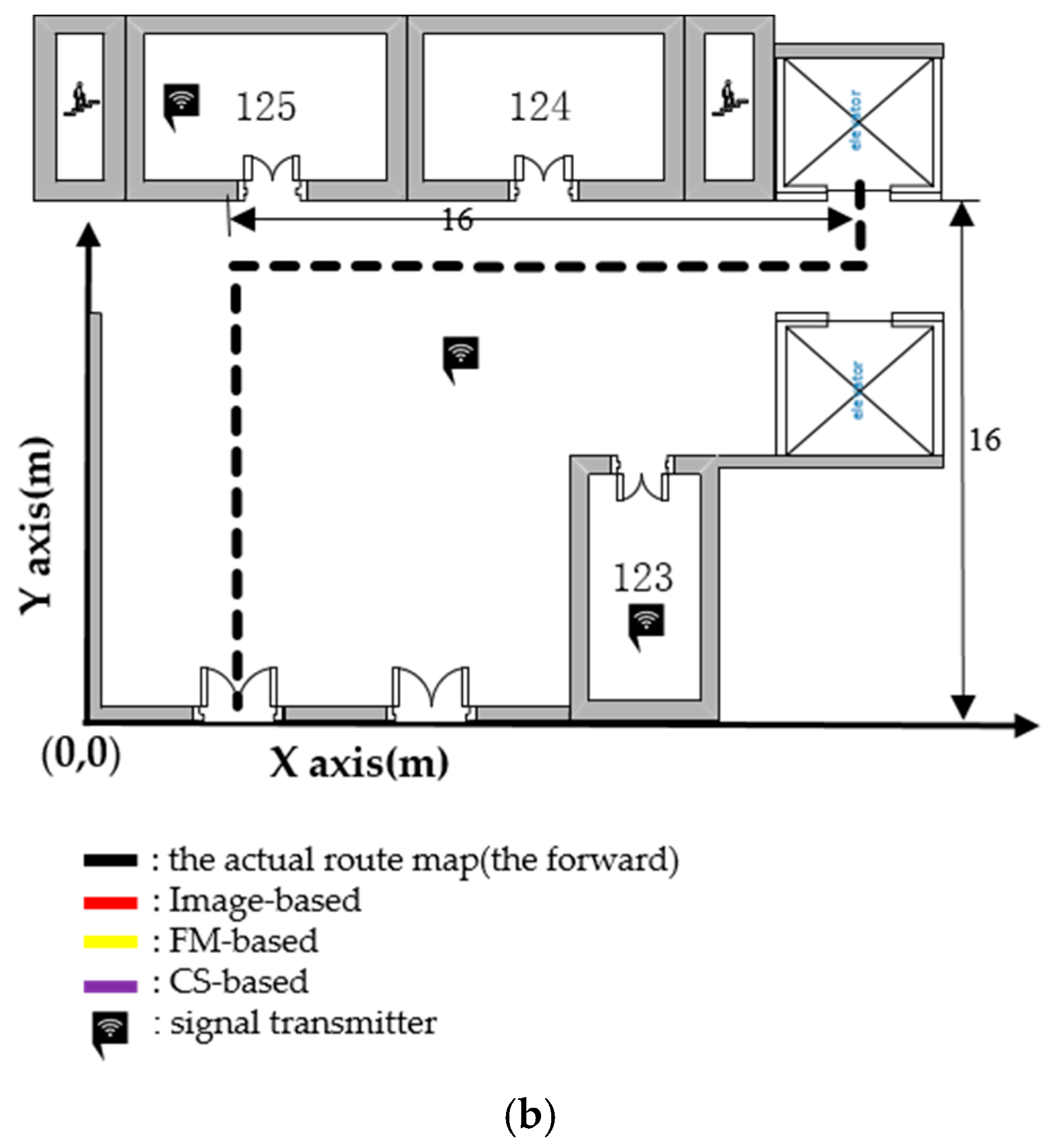
4.1. Experimental Setting
4.2. Human Detection Evaluation
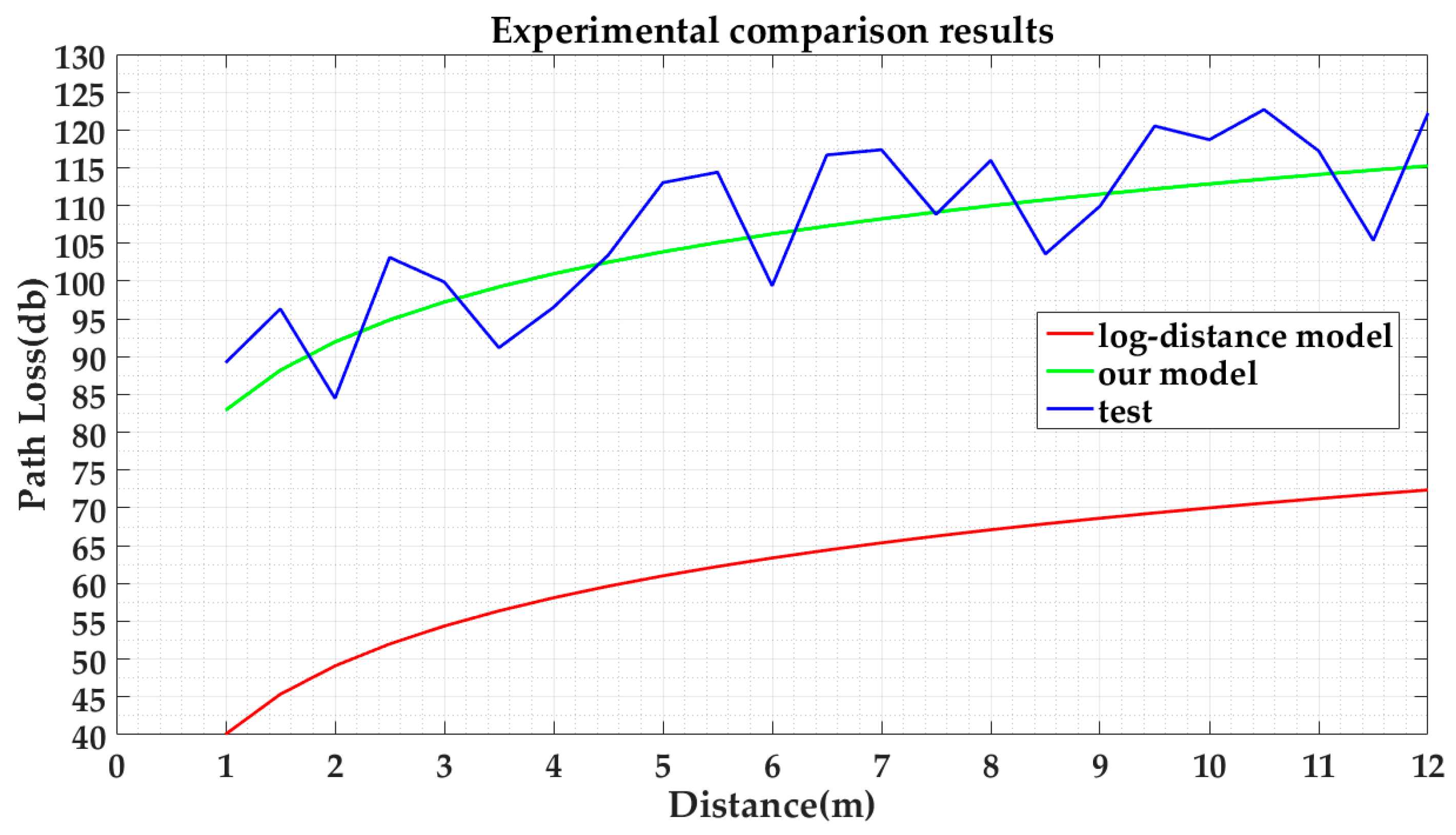
4.3. Turbo RSSI Model Evaluation
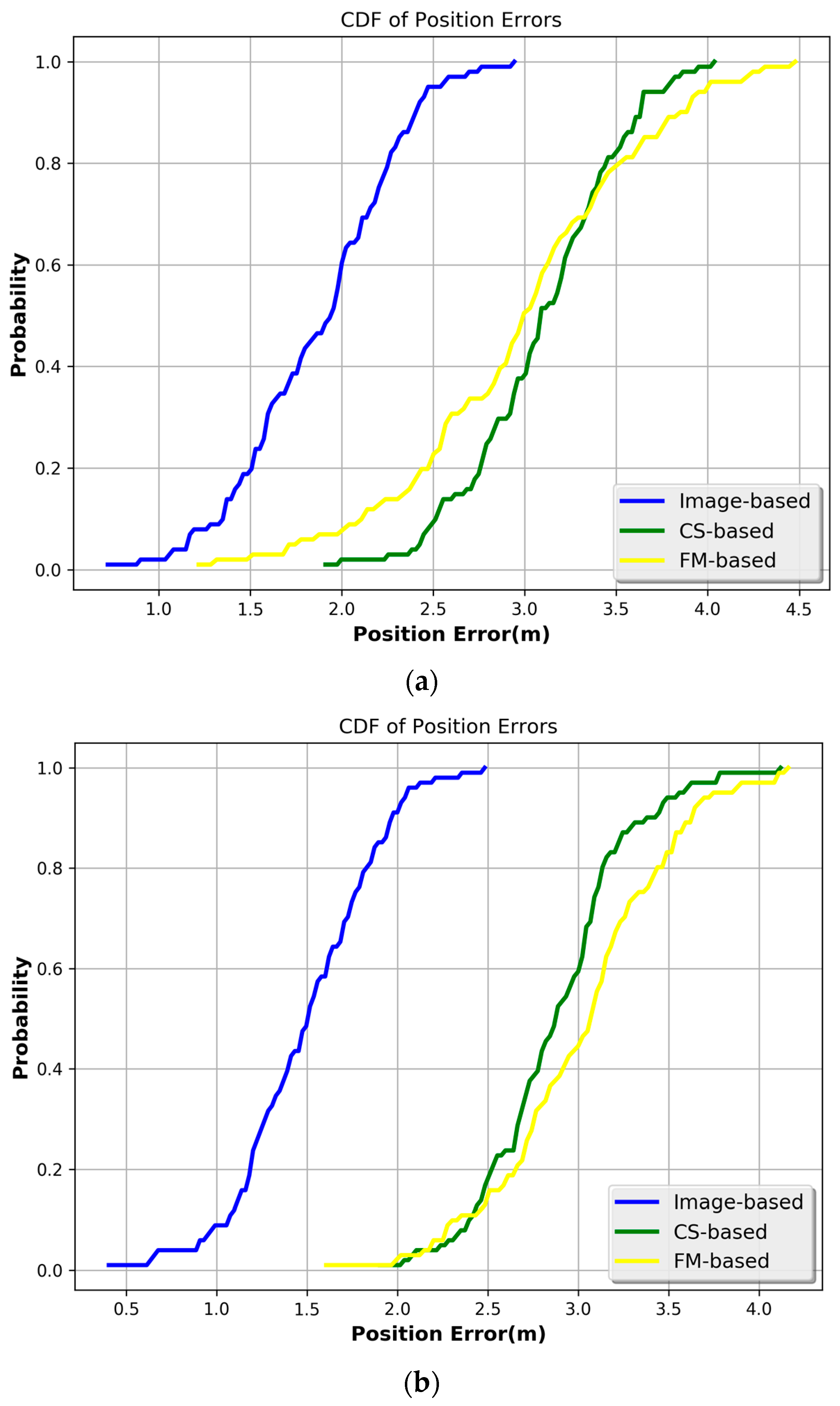
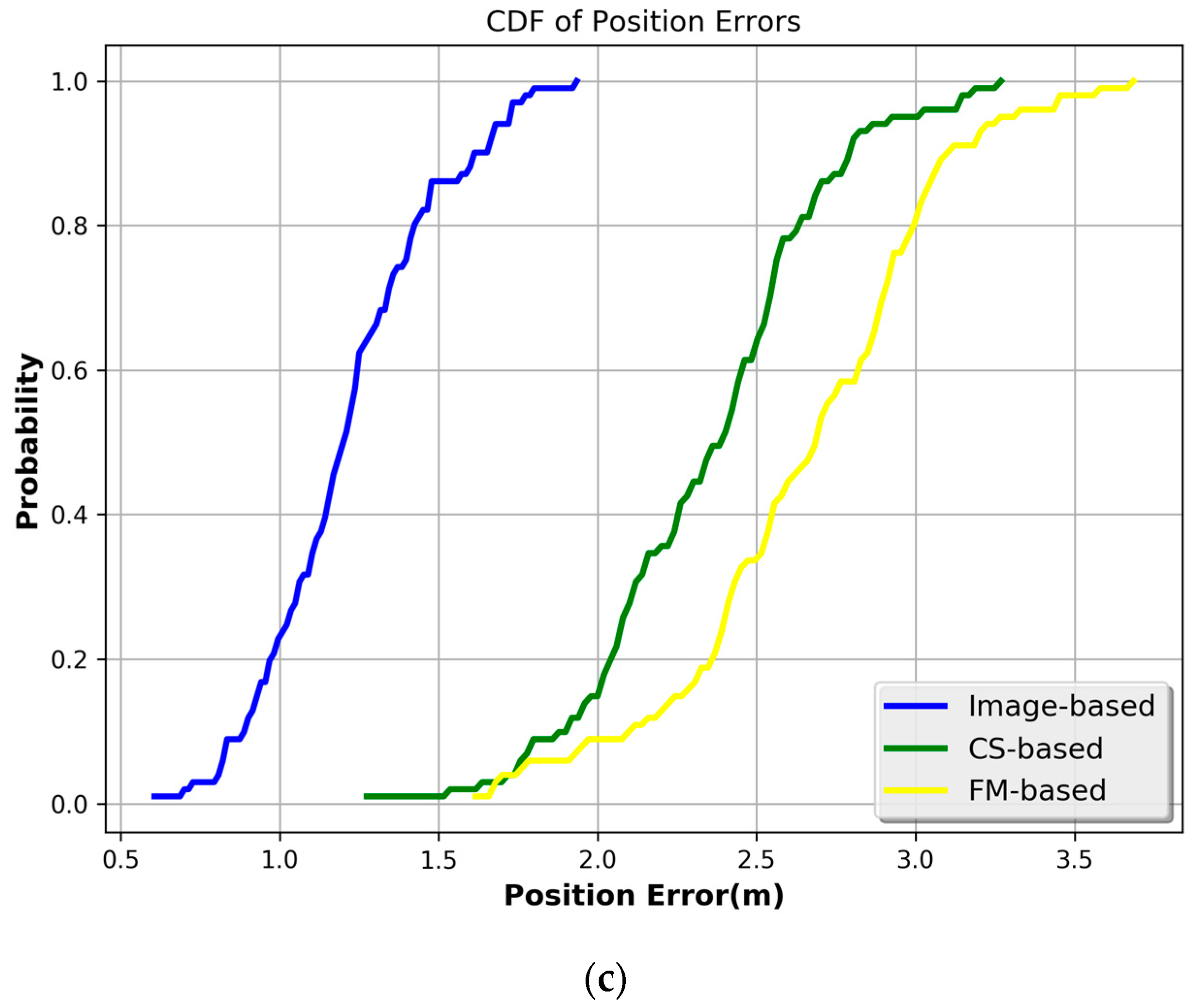
4.4. Positioning Performance
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 1. [Google Scholar] [CrossRef]
- Zhang, P.; Zhao, Q.; Li, Y.; Niu, X.; Zhuang, Y.; Liu, J. Collaborative WiFi Fingerprinting Using Sensor-Based Navigation on Smartphones. Sensors 2015, 15, 17534–17557. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the Consumer Communications and NETWORKING Conference, Las Vegas, NV, USA, 11–14 January 2013; pp. 837–842. [Google Scholar]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the International Conference on Information, Communications & Signal Processing, Birmingham, UK, 20–22 October 2008; pp. 1–5. [Google Scholar]
- Nossire, Z.; Dichter, J.; Gupta, N. A new mathematical model for wireless signal path loss under varying conditions. In Proceedings of the IEEE Long Island Systems, Applications and Technology Conference, Farmingdale, NY, USA, 29 April 2016. [Google Scholar]
- Viani, F.; Robol, F.; Polo, A.; Rocca, P.; Oliveri, G.; Massa, A. Wireless architectures for heterogeneous sensing in smart home applications: Concepts and real implementation. Proc. IEEE 2013, 101, 2381–2396. [Google Scholar] [CrossRef]
- Aguirre, E.; Arpon, J.; Azpilicueta, L.; Falcone, F. Evaluation of electromagnetic dosimetry of wireless systems in complex indoor scenarios with human body interaction. Prog. Electromagn. Res. B 2012, 43, 189–209. [Google Scholar] [CrossRef]
- Led, S.; Azpilicueta, L.; Aguirre, E.; de Espronceda, M.M.; Serrano, L.; Falcone, F. Analysis and description of HOLTIN service provision for AECG monitoring in complex indoor environments. Sensors 2013, 13, 4947–4960. [Google Scholar] [CrossRef] [PubMed]
- Pyattaev, A.; Johnsson, K.; Andreev, S.; Koucheryavy, Y. Communication challenges in high-density deployments of wearable wireless devices. IEEE Wirel. Commun. 2015, 22, 12–18. [Google Scholar] [CrossRef]
- Gandhi, O.P.; Riazi, A. Absorption of millimeter waves by human beings and its biological implications. IEEE Trans. Microwave Theory Tech. 1986, 34, 228–235. [Google Scholar] [CrossRef]
- Cotton, S.L.; McKernan, A.; Ali, A.J.; Scanlon, W.G. An experimental study on the impact of human body shadowing in off-body communications channels at 2.45 GHz. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 3133–3137. [Google Scholar]
- Turner, J.S.C.; Ramli, M.F.; Kamarudin, L.M.; Zakaria, A.; Shakaff, A.Y.M.; Ndzi, D.L.; Nor, C.M.; Hassan, N.; Mamduh, S.M. The study of human movement effect on Signal Strength for indoor WSN deployment. In Proceedings of the IEEE Conference on Wireless Sensor, Kuching, Sarawak, Malaysia, 2–4 December 2013; pp. 30–35. [Google Scholar]
- Ito, K.; Hotta, Y. Signal path loss simulation of human arm for galvanic coupling intra-body communication using circuit and finite element method models. In Proceedings of the IEEE Twelfth International Symposium on Autonomous Decentralized Systems, Taichung, Taiwan, 25–27 March 2015; pp. 230–235. [Google Scholar]
- Mao, G.; Anderson, B.D.O.; Fidan, B. Path loss exponent estimation for wireless sensor network localization. Comput. Networks 2007, 51, 2467–2483. [Google Scholar] [CrossRef]
- Faria, D.B.; Faria, D.B. Modeling Signal Attenuation in IEEE 802.11 Wireless LANs-vol. 1. Available online: http://gregorio.stanford.edu/kiwi/files/faria-TR-KP06-0118.pdf (accessed on 28 March 2017).
- Liu, H.H. The Quick Radio Fingerprint Collection Method for a WiFi-Based Indoor Positioning System. Mob. Netw. Appl. 2015, 22, 61–71. [Google Scholar] [CrossRef]
- Ayadi, M.; Ben Zineb, A. Body shadowing and furniture effects for accuracy improvement of indoor wave propagation models. IEEE Trans. Wirel. Commun. 2014, 13, 5999–6006. [Google Scholar] [CrossRef]
- Ahmadi, H.; Polo, A.; Moriyama, T.; Salucci, M.; Viani, F. Semantic wireless localization of WiFi terminals in smart buildings. Radio Sci. 2016, 51, 876–892. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Deng, C. Research on Indoor Wireless Propagation Empirical Models. In Proceedings of the National Youth Communication Conference, Beijing, China, 11–12 August 2007. [Google Scholar]
- Myung, I.J. Tutorial on maximum likelihood estimation. J. Math. Psychol. 2003, 47, 90–100. [Google Scholar] [CrossRef]
- Beauducel, A.; Herzberg, P.Y. On the performance of maximum likelihood versus means and variance adjusted weighted least squares estimation in CFA. Struct. Equ. Model. 2006, 13, 186–203. [Google Scholar] [CrossRef]
- Alam, N.; Balaie, A.T.; Dempster, A.G. Dynamic path loss exponent and distance estimation in a vehicular network using doppler effect and received signal strength. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference: VTC 2010-Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Zeytinci, M.B.; Sari, V.; Harmanci, F.K.; Anarim, E.; Akar, M. Location estimation using RSS measurements with unknown path loss exponents. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 1–14. [Google Scholar] [CrossRef]
- Jia, Z.; Wu, C.; Li, Z.; Zhang, Y.; Guan, B. The indoor localization and tracking estimation method of mobile targets in three-dimensional wireless sensor networks. Sensors 2015, 15, 29661–29684. [Google Scholar] [CrossRef] [PubMed]
- Khan, U.A.; Kar, S.; Moura, J.M.F. Distributed sensor localization in random environments using minimal number of anchor nodes. IEEE Trans. Signal Process. 2009, 57, 2000–2016. [Google Scholar] [CrossRef]
- Vermeeren, G.; Gosselin, M.C.; Kühn, S.; Kellerman, V.; Hadjem, A.; Gati, A.; Joseph, W.; Wiart, J.; Meyer, F.; Kuster, N.; et al. The influence of the reflective environment on the absorption of a human male exposed to representative base station antennas from 300 MHz to 5 GHz. Phys. Med. Biol. 2009, 55, 5541–5555. [Google Scholar] [CrossRef] [PubMed]
- Gosselin, M.C.; Vermeeren, G.; Kuhn, S.; Kellerman, V.; Benkler, S.; Uusitupa, T.M.I.; Joseph, W.; Gati, A.; Wiart, J.; Meyer, F.J.C.; et al. Estimation formulas for the specific absorption rate in humans exposed to base-station antennas. IEEE Trans. Electromagn. Compat. 2011, 53, 909–922. [Google Scholar] [CrossRef]
- Deng, P. The numerical simulation of electric field distribution in human body exposed to electromagnetic plane waves between 0.9 GHz and 10 GHz. Master’s Thesis, East China Normal University, Shanghai, China, March 2012. (In Chinese). [Google Scholar]
- Davidson, D.B. Computational Electromagnetics for RF and Microwave Engineering; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Nayyeri, V.; Soleimani, M.; Ramahi, O.M. Modeling graphene in the finite-difference time-domain method using a surface boundary condition. IEEE Trans. Antennas Propag. 2013, 61, 4176–4182. [Google Scholar] [CrossRef]
- Lewczuk, B.; Redlarski, G.; Żak, A.; Ziółkowska, N.; Przybylska-Gornowicz, B.; Krawczuk, M. Influence of electric, magnetic, and electromagnetic fields on the circadian system: current stage of knowledge. Biomed. Res. Int. 2014, 2014, 169459. [Google Scholar] [CrossRef] [PubMed]
- Johnson, J.; Karpathy, A.; Li, F.F. Densecap: Fully convolutional localization networks for dense captioning. arXiv, 2015; arXiv:1511.07571. [Google Scholar]
- Mikolov, T.; Karafiát, M.; Burget, L.; Cernocký, J.; Khudanpur, S. Recurrent neural network based language model. In Proceedings of the Interspeech, Makuhari, Chiba, Japan, 26–30 September 2010; Volume 2, p. 3. [Google Scholar]
- Chen, M.; Hauptmann, A. Mosift: Recognizing Human Actions in Surveillance Videos; Technical Report; Carnegie Mellon University: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–26 June 2005; Volume 1. [Google Scholar]
- Jun, B.; Choi, I.; Kim, D. Local transform features and hybridization for accurate face and human detection. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1423–1436. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.-L.; Pang, G.K.H. People counting and human detection in a challenging situation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 24–33. [Google Scholar] [CrossRef]
- Zeng, C.; Ma, H. Robust head-shoulder detection by pca-based multilevel hog-lbp detector for people counting. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2069–2072. [Google Scholar]
- Sharif Razavian, A.; Azizpour, H.; Sullivan, J.; Carlsson, S. CNN features off-the-shelf: An astounding baseline for recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 24–27 June 2014; pp. 806–813. [Google Scholar]
- Nguyen, D.T.; Li, W.; Ogunbona, P.O. Human detection from images and videos: a survey. Pattern Recognit. 2016, 51, 148–175. [Google Scholar] [CrossRef]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304. [Google Scholar]
- Chen, Y.; Lymberopoulos, D.; Liu, J.; Priyantha, B. FM-based indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, Lake District, UK, 25–29 June 2012. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Camera | 13 MP |
| Sampling period | 2.0 s |
| The initial RSSI value | −20 dBm |
| Image resolution | 2048 × 2048 pixels |
| The transmitter height | 2 m |
| Algorithm | Min Error (m) | Max Error (m) | RMSE (m) |
|---|---|---|---|
| Image-based | 0.52 | 1.37 | 1.14 |
| CS-based | 1.23 | 3.98 | 2.37 |
| FM-based | 1.06 | 2.85 | 2.06 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, J.; Li, F.; Deng, Z.; Ma, W. A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN. Sensors 2017, 17, 704. https://doi.org/10.3390/s17040704
Jiao J, Li F, Deng Z, Ma W. A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN. Sensors. 2017; 17(4):704. https://doi.org/10.3390/s17040704
Chicago/Turabian StyleJiao, Jichao, Fei Li, Zhongliang Deng, and Wenjing Ma. 2017. "A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN" Sensors 17, no. 4: 704. https://doi.org/10.3390/s17040704
APA StyleJiao, J., Li, F., Deng, Z., & Ma, W. (2017). A Smartphone Camera-Based Indoor Positioning Algorithm of Crowded Scenarios with the Assistance of Deep CNN. Sensors, 17(4), 704. https://doi.org/10.3390/s17040704