
Study on Temperature and Synthetic Compensation of Piezo-Resistive Differential Pressure Sensors by Coupled Simulated Annealing and Simplex Optimized Kernel Extreme Learning Machine

Abstract
:1. Introduction
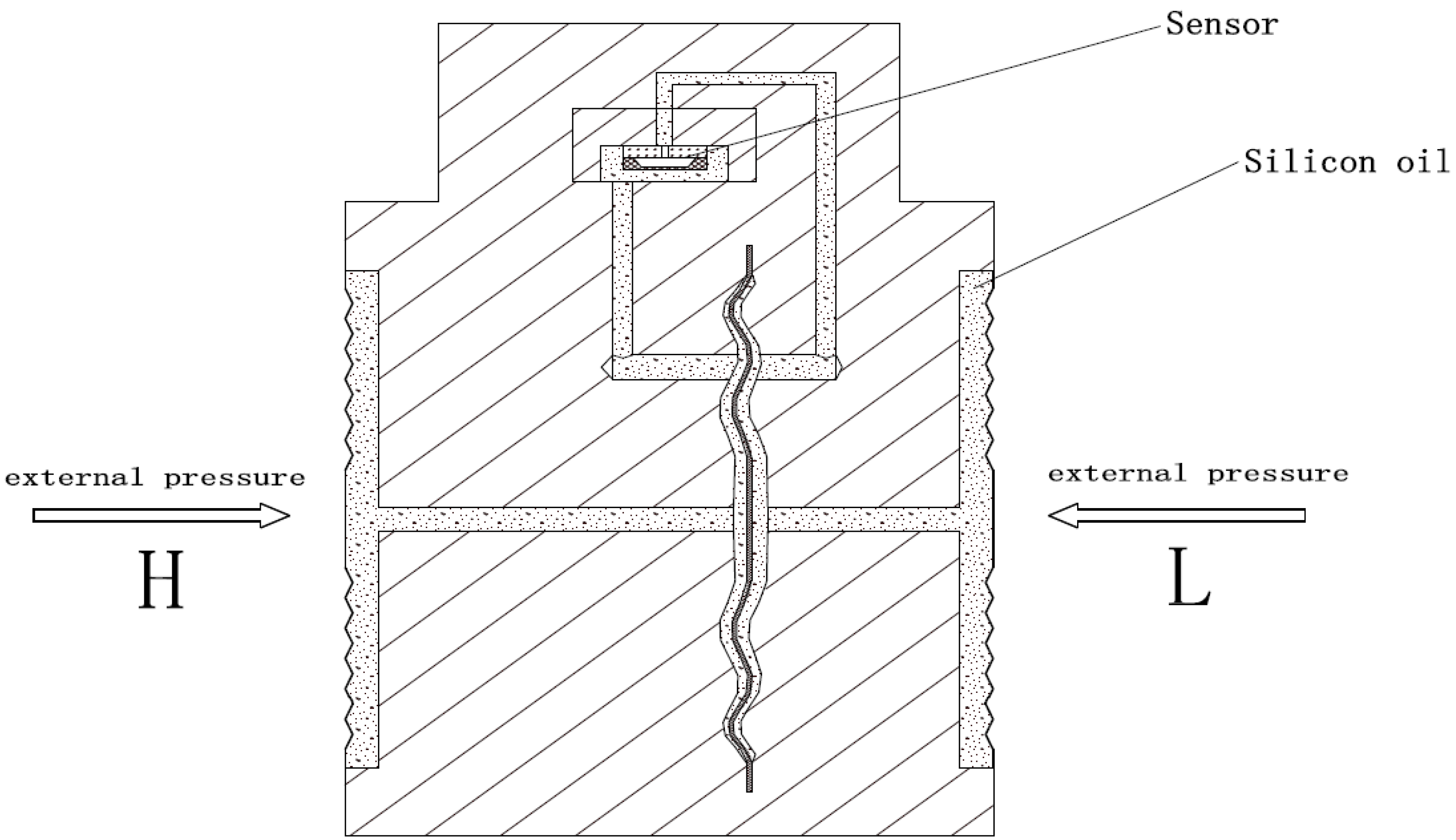
2. Temperature Effect and Static Pressure Effect
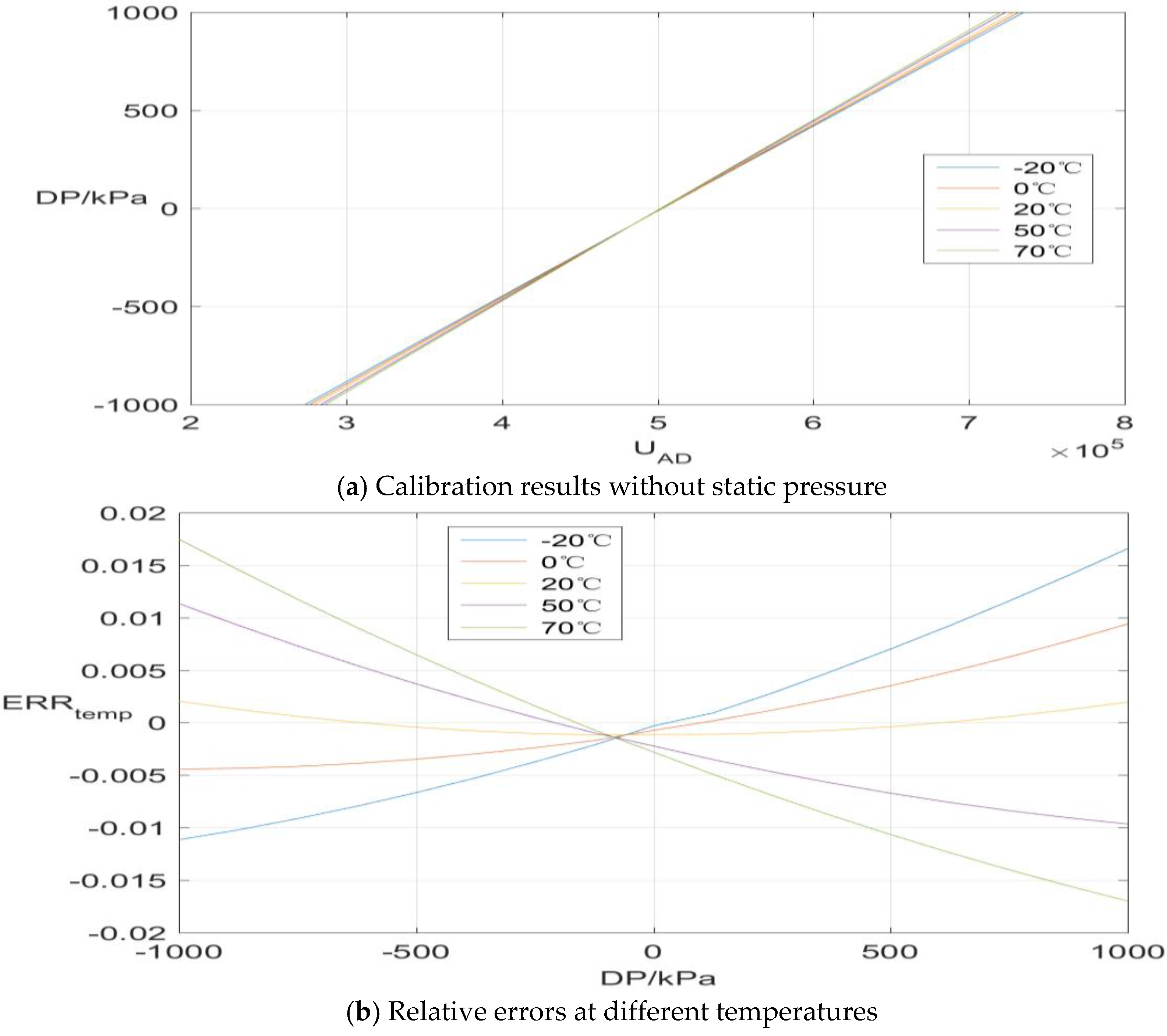
2.1. Temperature Effect
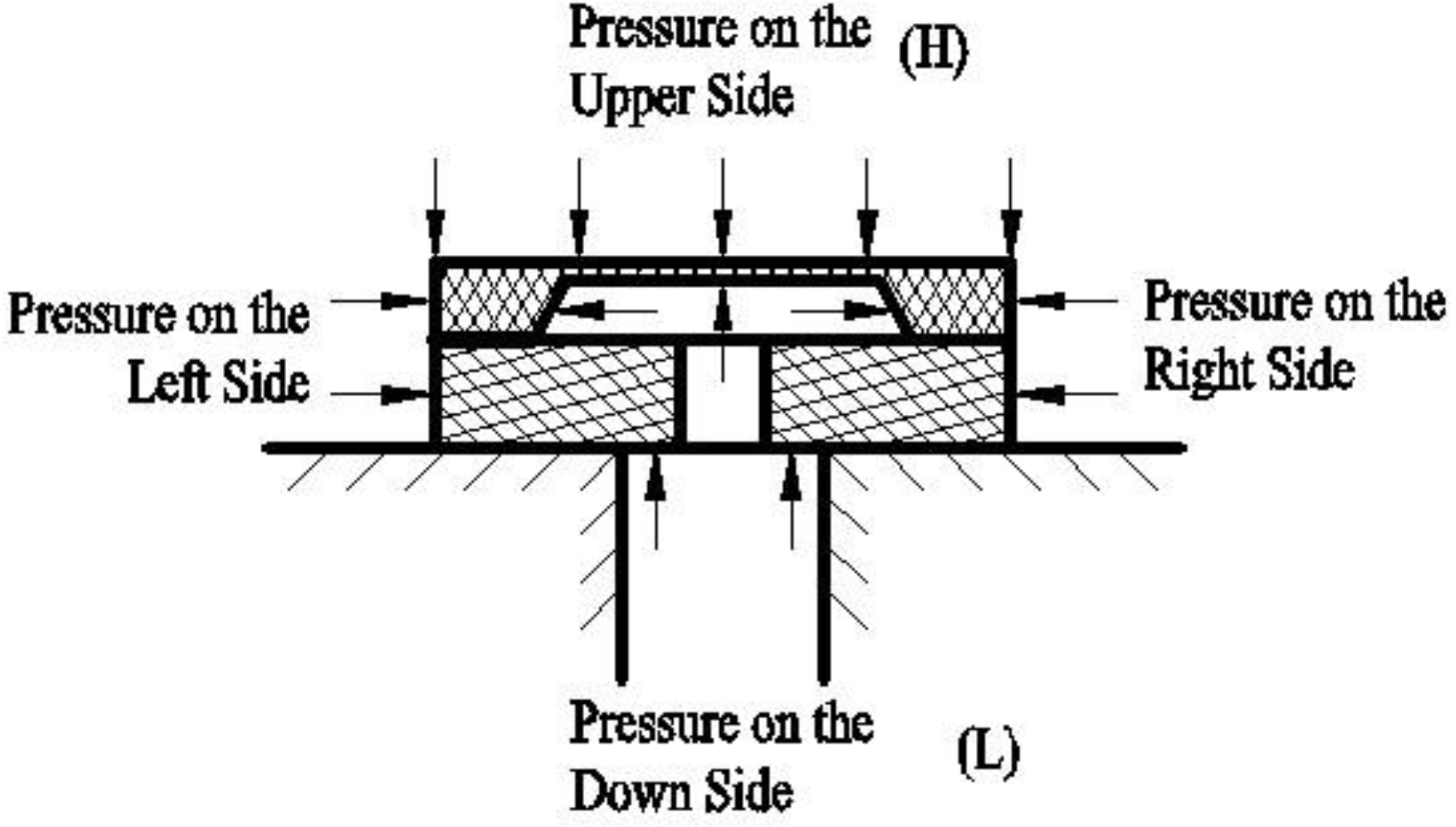
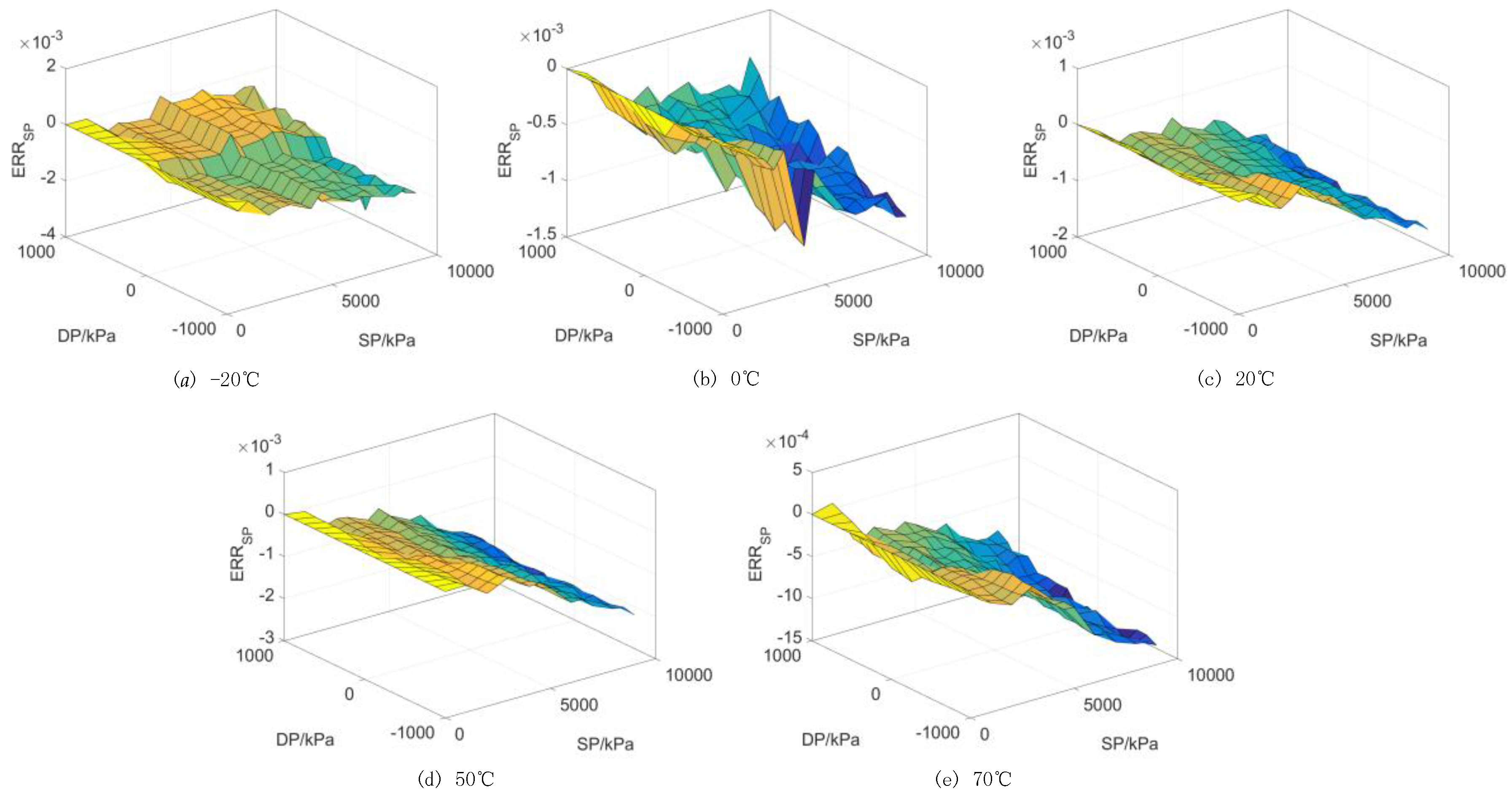
2.2. Static Pressure Effect
3. Kernel Extreme Learning Machine
4. Coupled Simulated Annealing and Simplex Search
4.1. Coupled Simulated Annealing (CSA)
- (1)
- Initialization: M random solutions are assigned to . Evaluate the energy and coupled term . Set as , as and the iteration index k equals to zero. The variance of the acceptance probability is calculated according to , where m is the number of all states included in . The rate controls the temperature variation marked as is set to 0.05.
- (2)
- A new state is generated that corresponds to the current state in the state space by where is independently and randomly sampled from a normal distribution at temperature as . Evaluate all the energy values ,
- (3)
- The new state is accepted if ≤ or a random number rand is generated by a uniform distribution in [0, 1] and compared with the acceptance probability obtained by Equation (12) when it satisfies the condition . Otherwise, the old state remains. Assess and return to step 2 to achieve thermal equilibrium condition.
- (4)
- Adjust the acceptance temperature by the rules: if , if .
- (5)
- Increment the annealing time k and decrease the temperature according to the annealing scheme: .
- (6)
- Terminate the iteration if the current energy value meets the stopping criterion, otherwise, go back to step 2.
4.2. Simplex Search
- Build n + 1 vertices of X, evaluate and sort their function values.
- Compute the reflection point by , where is the centroid of the n points except for the worst point as . If , accept the reflected point .
- If , perform the expansion operation as . If , accept the expanded point ; otherwise accept .
- If , a contraction should be done utilizing with the better point of and :
- (a)
- If , then outside contraction: . If , accept ; otherwise go to step 5.
- (b)
- If , then inside contraction: . If , accept ; otherwise go to step 5.
- Calculate f at the n points The vertices at the next iteration are made up of .
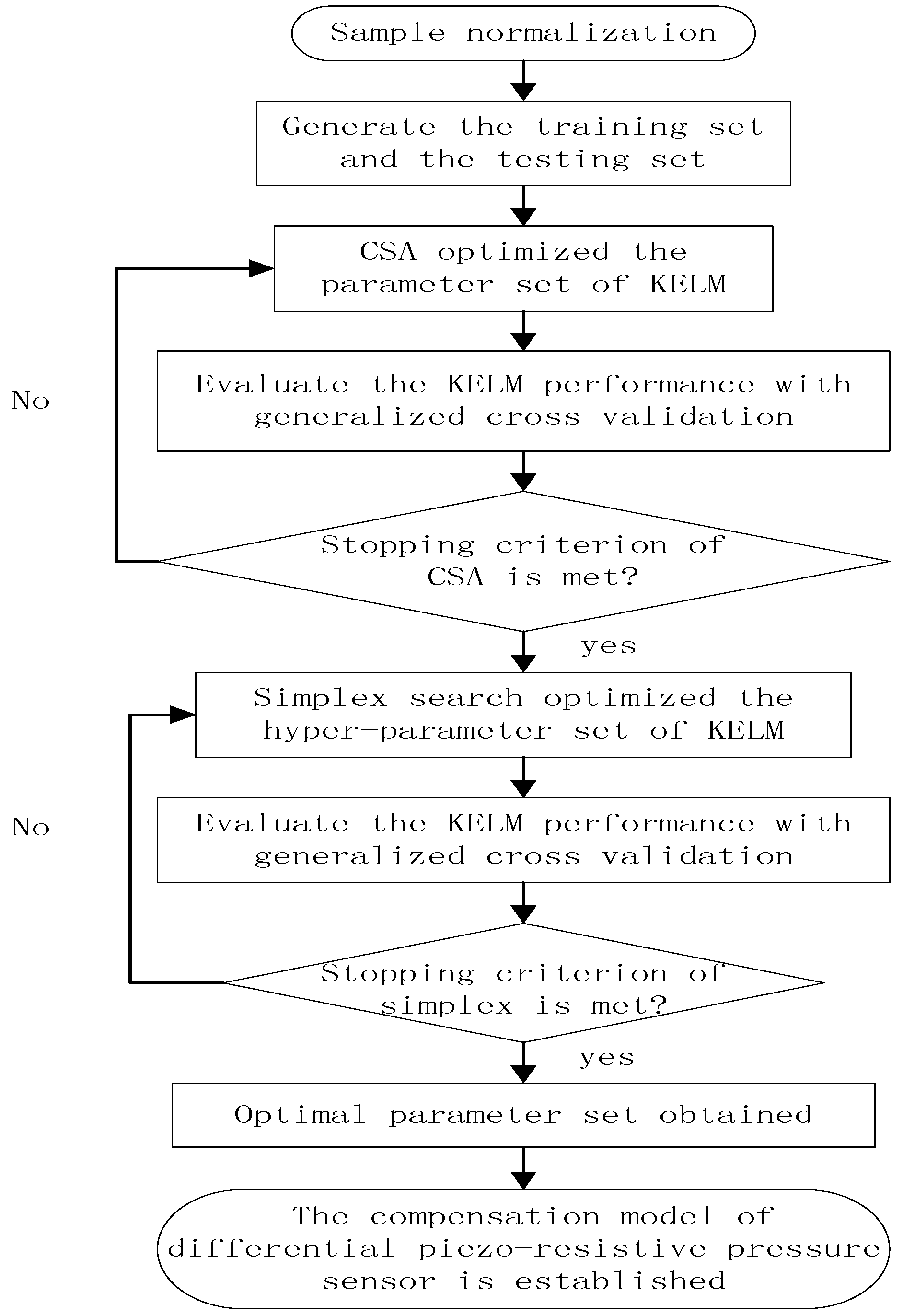
- (1)
- Divide the normalized sample into training set and testing set according to the engineering requirements.
- (2)
- Initialize the KELM with a random parameter set in an acceptable range.
- (3)
- Initialize the parameters in CSA such as the number of states at a certain temperature M, the coupled term value , the starting temperature , the starting acceptance temperature and the temperature step regulating rate .
- (4)
- Evaluate the function iteratively until the maximum iteration number is reached or the fitness is less than the limit . A suboptimal hyper-parameter set is found through this step.
- (5)
- The simplex search is performed with the start solution as until the maximum iteration number is reached or the difference between fitness in two successions is small than the limit . Finally, a more satisfactory parameter set as can be obtained.
5. Experiments and Result Analysis
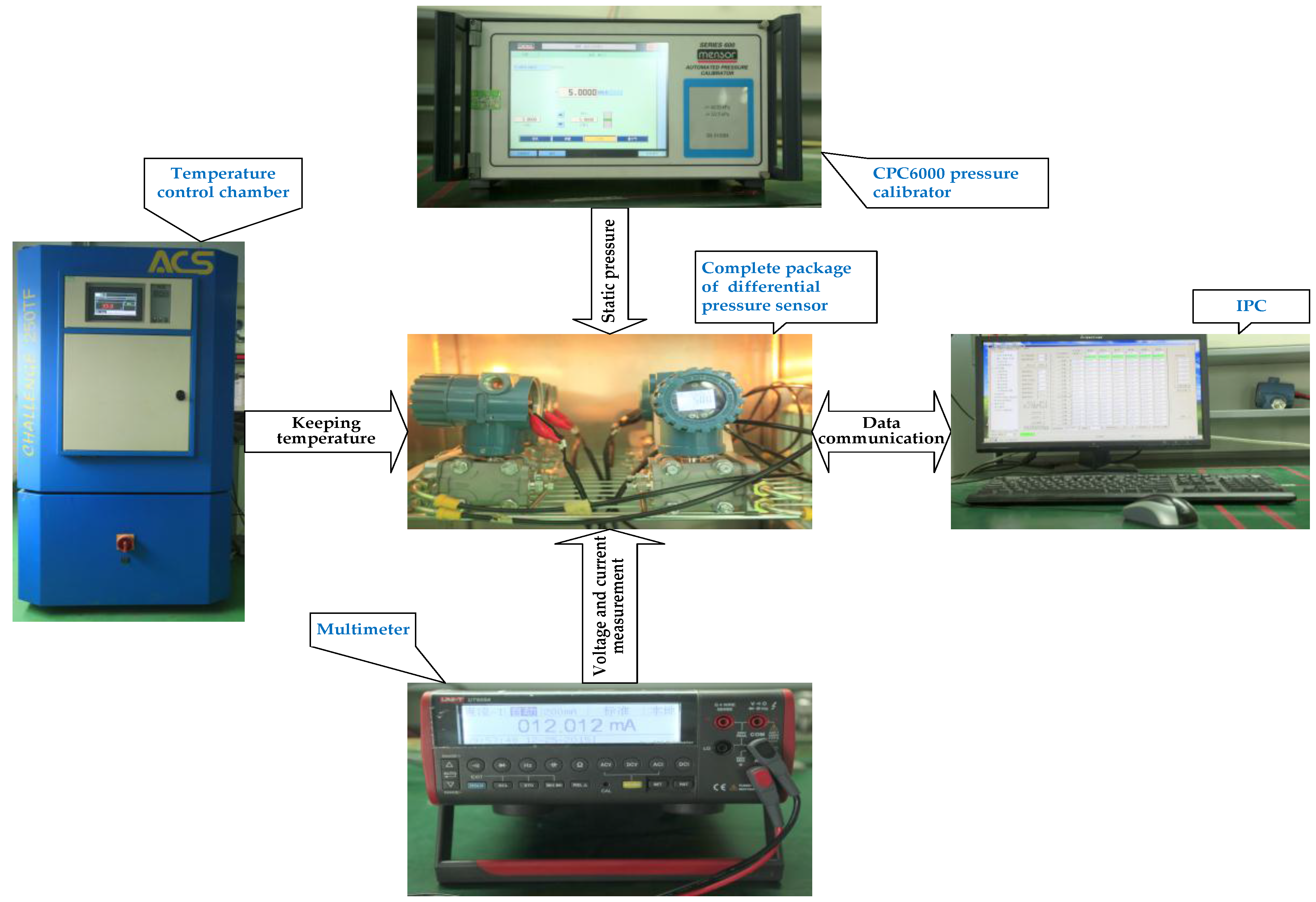
5.1. Calibration Experiment Setup
5.2. Logarithmic Transformation of Dependent Parameters and Normalization
5.3. Compensation Result Analysis
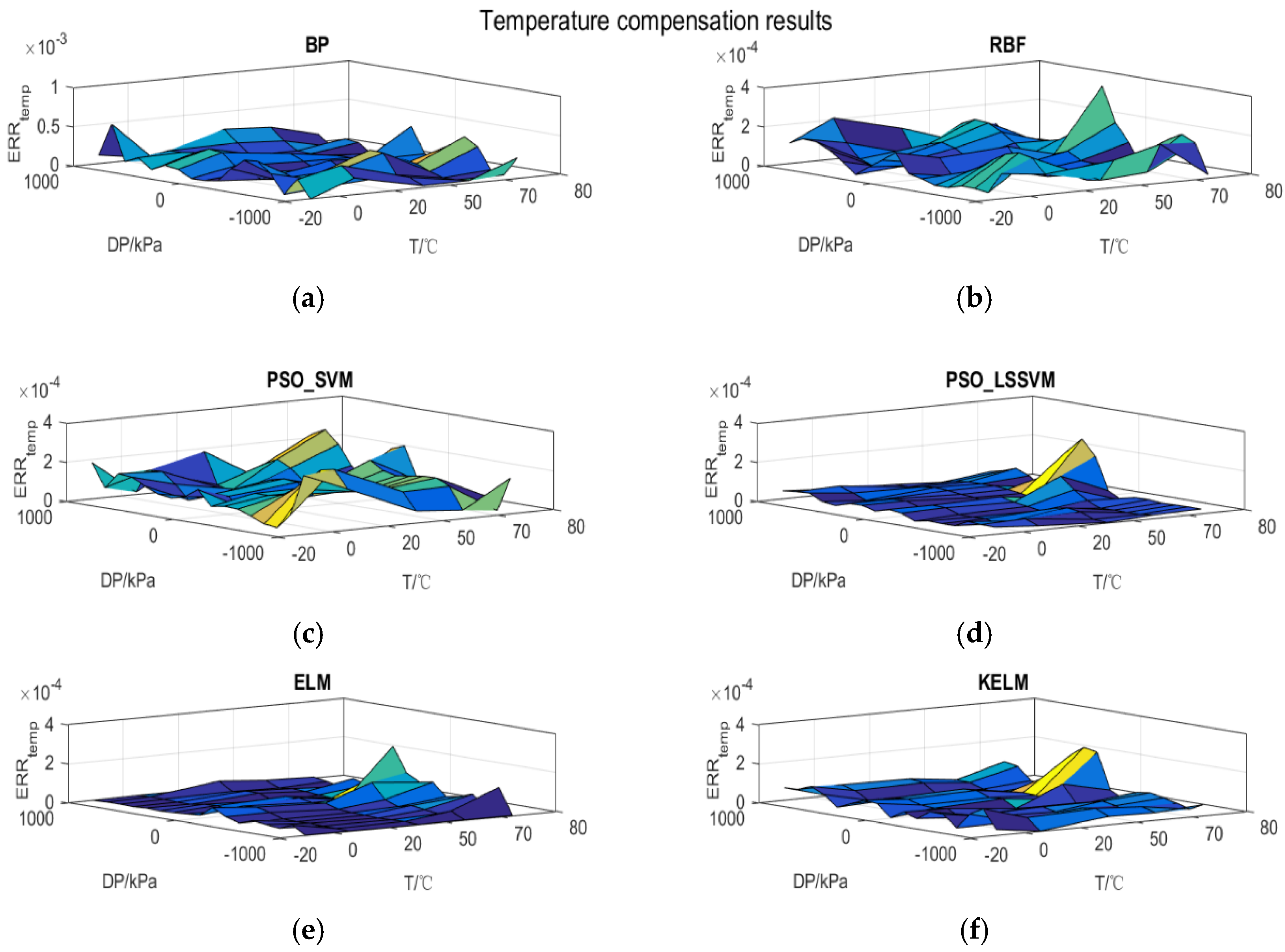
5.3.1. Temperature Compensation
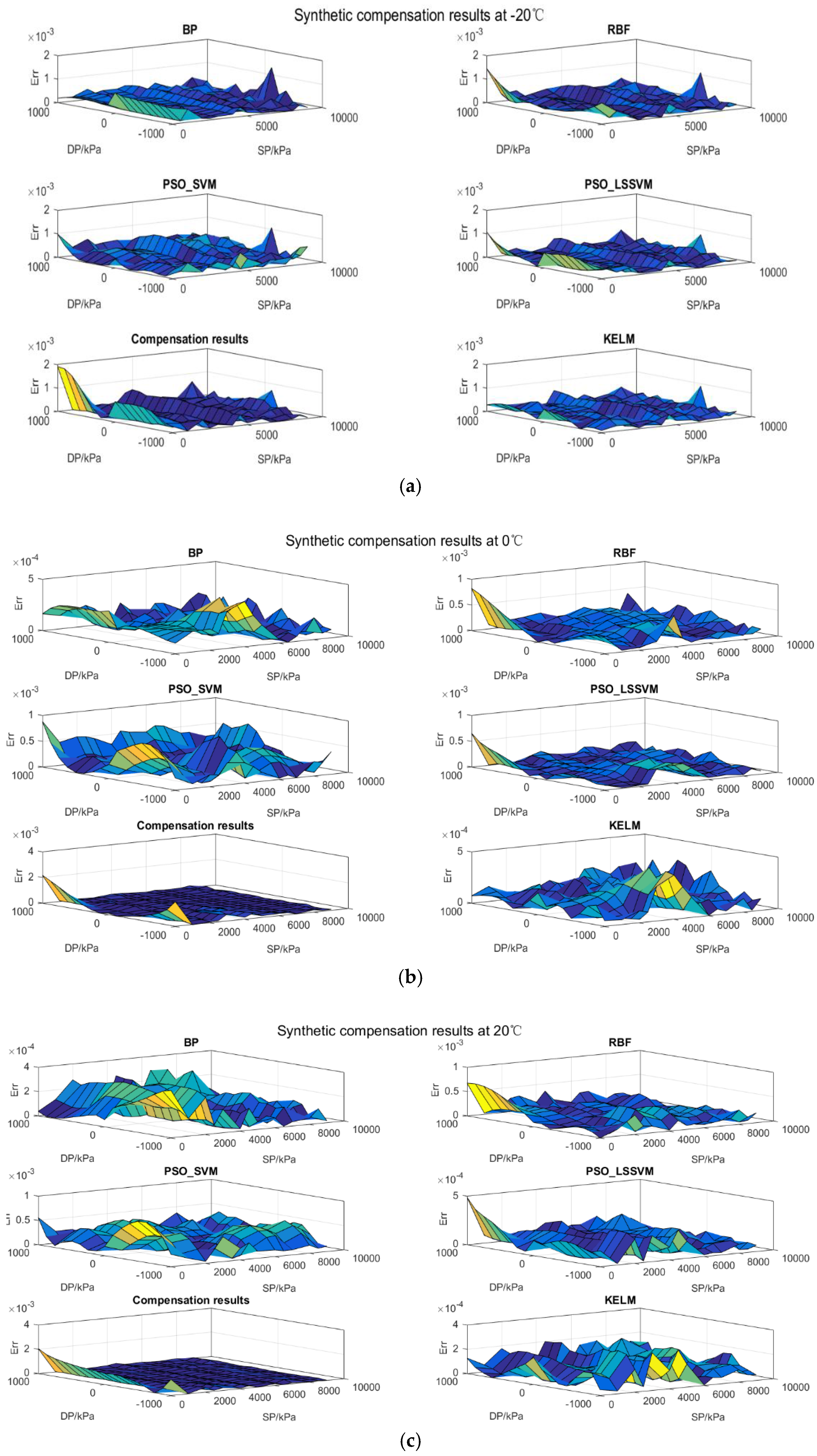
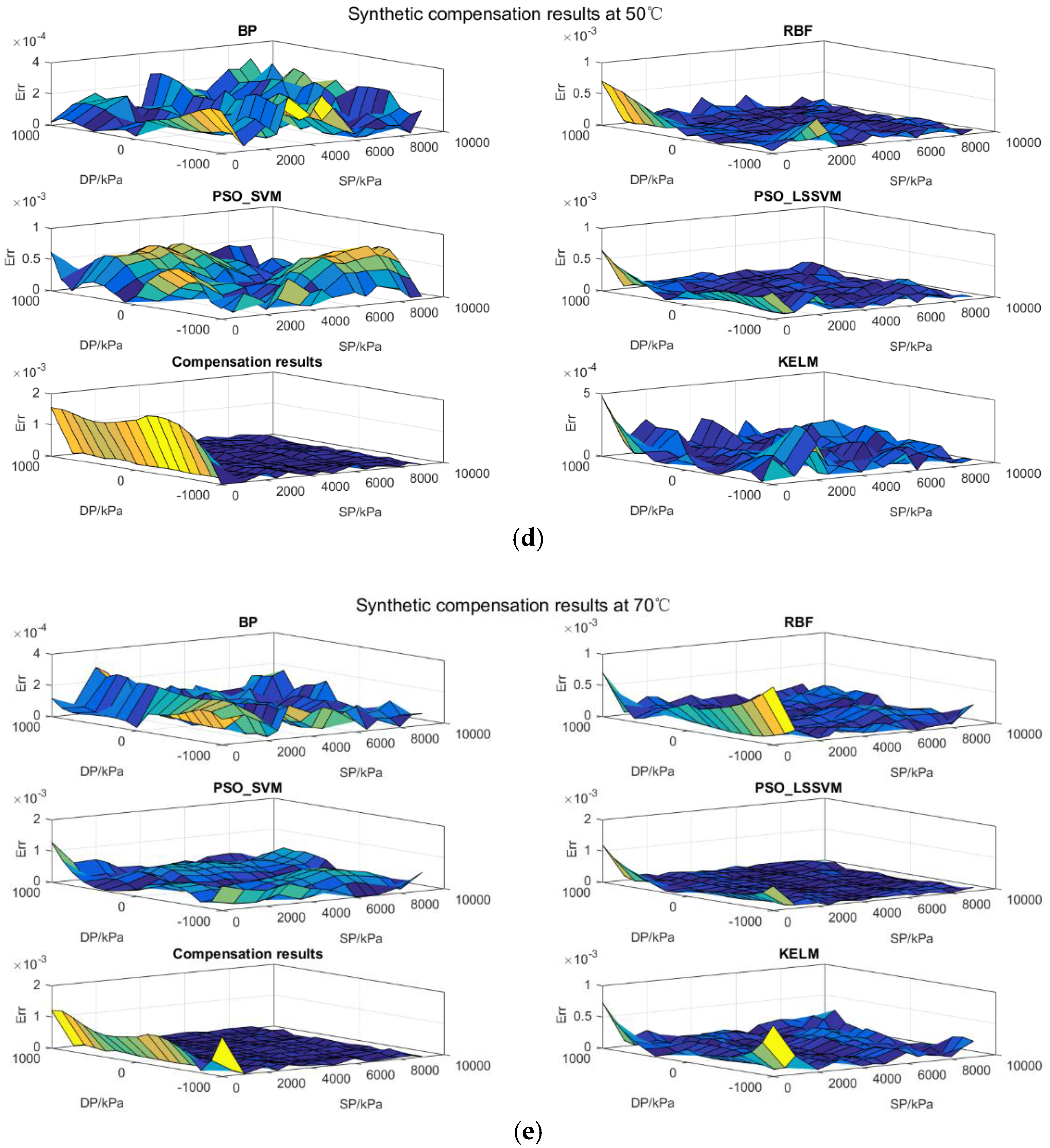
5.3.2. Synthetic Compensation
6. Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Barlian, A.A.; Park, W.-T.; Mallon, J.R., Jr.; Rastegar, A.J.; Pruitt, B.L. Review: Semiconductor Piezoresistance for Microsystems. Proc. IEEE 2009, 97, 513–552. [Google Scholar] [CrossRef] [PubMed]
- Hoang-Phuong, P.; Kozeki, T.; Dinh, T.; Fujii, T.; Qamar, A.; Zhu, Y.; Namazu, T.; Nam-Trung, N.; Dao, D.V. Piezoresistive effect of p-type silicon nanowires fabricated by a top-down process using FIB implantation and wet etching. RSC. Adv. 2015, 5, 82121–82126. [Google Scholar]
- Doll, J.C.; Corbin, E.A.; King, W.P.; Pruitt, B.L. Self-heating in piezoresistive cantilevers. Appl. Phys. Lett. 2011, 98, 834. [Google Scholar] [CrossRef] [PubMed]
- Maboudian, R.; Carraro, C.; Senesky, D.G.; Roper, C.S. Advances in silicon carbide science and technology at the micro- and nanoscales. J. Vac. Sci. Technol. A 2013, 31. [Google Scholar] [CrossRef]
- Hoang-Phuong, P.; Dzung Viet, D.; Nakamura, K.; Dimitrijev, S.; Nam-Trung, N. The Piezoresistive Effect of SiC for MEMS Sensors at High Temperatures: A Review. J. Microelectromech. Syst. 2015, 24, 1663–1677. [Google Scholar]
- Yalamarthy, A.S.; Senesky, D.G. Strain- and temperature-induced effects in AlGaN/GaN high electron mobility transistors. Semicond. Sci. Technol. 2016, 31, 035024. [Google Scholar] [CrossRef]
- Gakkestad, J.; Ohlckers, P.; Halbo, L. Effects of process variations in a CMOS circuit for temperature compensation of piezoresistive pressure sensors. Sens. Actuators A Phys. 1995, 48, 63–71. [Google Scholar] [CrossRef]
- Aryafar, M.; Hamedi, M.; Ganjeh, M.M. A novel temperature compensated piezoresistive pressure sensor. Measurement 2015, 63, 25–29. [Google Scholar] [CrossRef]
- Yao, Z.; Liang, T.; Jia, P.; Hong, Y.; Qi, L.; Lei, C.; Zhang, B.; Li, W.; Zhang, D.; Xiong, J. Passive resistor temperature compensation for a high-temperature piezoresistive pressure sensor. Sensors 2016, 16, 1142. [Google Scholar] [CrossRef] [PubMed]
- Futane, N.P.; Roychowdhury, S.; Roychaudhuri, C.; Saha, H. Analog ASIC for improved temperature drift compensation of a high sensitive porous silicon pressure sensor. Analog Integr. Circuits Signal Process. 2011, 67, 383–393. [Google Scholar] [CrossRef]
- Hao, X.; Maenaka, K.; Takao, H.; Higuchi, K. An analytical thermal-structural model of a gas-sealed capacitive pressure sensor with a mechanical temperature compensation structure. Sens. Actuators A Phys. 2014, 205, 92–102. [Google Scholar] [CrossRef]
- Mozek, M.; Vrtacnik, D.; Resnik, D.; Pecar, B.; Amon, S. Compensation and Signal Conditioning of Capacitive Pressure Sensors. Inform. Midem 2011, 41, 272–278. [Google Scholar]
- Luo, Y.; Yang, K.; Shi, Y.B.; Shang, C.X. Research of radiosonde humidity sensor with temperature compensation function and experimental verification. Sens. Actuators A Phys. 2014, 218, 49–59. [Google Scholar] [CrossRef]
- Chae, C.S.; Kwon, J.H.; Kim, Y.H. A Study of Compensation for Temporal and Spatial Physical Temperature Variation in Total Power Radiometers. IEEE Sens. J. 2012, 12, 2306–2312. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, Q.; Qin, J. Temperature compensation of pressure sensor based on the interpolation of splines. J. Beijing Univ. Aeronaut. Astronaut. 2006, 32, 684–686. [Google Scholar]
- Wang, H.R.; Zhang, W.; You, L.D.; Yuan, G.Y.; Zhao, Y.L.; Jiang, Z.D. Back propagation neural network model for temperature and humidity compensation of a non dispersive infrared methane sensor. Instrum. Sci. Technol. 2013, 41, 608–618. [Google Scholar] [CrossRef]
- Ding, J.C.; Zhang, J.; Huang, W.Q.; Chen, S. Laser Gyro Temperature Compensation Using Modified RBFNN. Sensors 2014, 14, 18711–18727. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Qi, B.; Chen, D.; Landry, R., Jr. Modification of an RBF ANN-Based Temperature Compensation Model of Interferometric Fiber Optical Gyroscopes. Sensors 2015, 15, 11189–11207. [Google Scholar] [CrossRef] [PubMed]
- Moallem, P.; Abdollahi, M.A.; Mehdi Hashemi, S. Compensation of capacitive differential pressure sensor using multi layer perceptron neural network. Int. J. Smart Sens. Intell. Syst. 2015, 8, 1443–1463. [Google Scholar]
- Qiu, H.-M.; Chen, D.; Li, G.-Y.; Huang, Y.; Chen, Z.-C.; Liang, J.-T. Temperature compensation of light addressable potentiometric sensor based on support vector machine. J. Optoelectron. Laser 2015, 26, 2272–2277. [Google Scholar]
- Yang, J.; Mei, X.-S.; Zhao, L.; Ma, C.; Feng, B.; Shi, H. Thermal error modeling of a coordinate boring machine based on fuzzy clustering and SVM. J. Shanghai Jiaotong Univ. 2014, 48, 1175–1182. [Google Scholar]
- Shao, J.; Liu, J.-H.; Qiao, X.-G.; Jia, Z.-A. Temperature compensation of FBG sensor based on support vector machine. J. Optoelectron. Laser 2010, 21, 803–807. [Google Scholar]
- Vapnik, V.N. Statistical Learning Theory; John Wiley&Sons Inc.: New York, NY, USA, 1998. [Google Scholar]
- Suykens, J.A.K.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Huang, G.-B.; Wang, D.H.; Lan, Y. Extreme learning machines: A survey. Int. J. Mach. Learn. Cybern. 2011, 2, 107–122. [Google Scholar] [CrossRef]
- Wong, P.K.; Wong, K.I.; Vong, C.M.; Cheung, C.S. Modeling and optimization of biodiesel engine performance using kernel-based extreme learning machine and cuckoo search. Renew. Energy 2015, 74, 640–647. [Google Scholar] [CrossRef]
- Li, J.; Hu, G.; Zhou, Y.; Zou, C.; Peng, W.; Jahangir Alam, S.M. A temperature compensation method for piezo-resistive pressure sensor utilizing chaotic ions motion algorithm optimized hybrid kernel LSSVM. Sensors 2016, 16, 1707. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Wang, F.; Xiao, G.; Wei, G.; Zhang, P.; Long, X. Temperature compensation method using readout signals of ring laser gyroscope. Opt. Express 2015, 23, 13320–13332. [Google Scholar] [CrossRef] [PubMed]
- Xavier-de-Souza, S.; Suykens, J.A.K.; Vandewalle, J.; Bolle, D. Coupled Simulated Annealing. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2010, 40, 320–335. [Google Scholar] [CrossRef] [PubMed]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization By Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Fan, S.K.S.; Zahara, E. A hybrid simplex search and particle swarm optimization for unconstrained optimization. Eur. J. Oper. Res. 2007, 181, 527–548. [Google Scholar] [CrossRef]
- Pressure/Differential-Pressure Transmitter for Use in Industrial-Progress Measure and Control Systems—Part1:Genneral Specification. Available online: http://dbpub.cnki.net/grid2008/dbpub/detail.aspx?QueryID=31&CurRec=6&dbcode=SCHF&dbname=SCSF&filename=SCSF00038855&urlid=&yx=&uid=WEEvREcwSlJHSldRa1FhdkJkdjFtWWtTRkFDSFVtVnR6NTdKV1M5eE5IVT0=$9A4hF_YAuvQ5obgVAqNKPCYcEjKensW4ggI8Fm4gTkoUKaID8j8gFw (accessed on 17 April 2017).
- Barnes, J.P.; Johnston, P.R. Application of robust generalised cross-validation to the inverse problem of electrocardiology. Comput. Biol. Med. 2016, 69, 213–225. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for Support Vector Machines. Acm Trans. Intell. Syst. Technol. 2011, 2, 27. [Google Scholar] [CrossRef]
- LS-SVMlab1.8. Available online: http://www.esat.kuleuven.be/sista/lssvmlab/ (accessed on 17 April 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | PSO-SVM | PSO-LSSVM | CSA-Simplex-KELM |
|---|---|---|---|
| swarm size/state level | 30 | 30 | 6 |
| iteration number/annealing time | 30 | 30 | 30 |
| maximum weight | 0.9 | 0.9 | |
| minimum weight | 0.4 | 0.4 | |
| social factor | [1, 3] | 2 | |
| cognitive factor | [1, 3] | 2 | |
| thermal equibrium steps | 5 | ||
| initial/acceptance temperature | 1 | ||
| regulation rate | 0.1 | ||
| Penalty parameter (C) | [1, 1 × 107] | [1, 1 × 107] | [1, 1 × 107] |
| Kernel parameter () | [1 × 10−3, 10] | [1 × 10−3, 10] | [1 × 10−3, 10] |
| maximum interval tolerance () | [1 × 10−6, 1] |
| Temperature Compensation Methods | Hidden Layer Node Number and Spread Parameter |
|---|---|
| BP | 8 |
| RBF | 37; spread:5.7 |
| ELM | 36 |
| CSA-simplex-KELM | 10 |
| Temperature Compensation Methods | Err (min) | Err (max) | Err (mean) | Err (variance) |
|---|---|---|---|---|
| BP | 6.1336 × 10−6 | 4.4261 × 10−4 | 1.1508 × 10−4 | 1.3032 × 10−8 |
| RBF | 3.9938 × 10−6 | 3.8180 × 10−4 | 8.9686 × 10−5 | 5.3639 × 10−9 |
| PSO-SVM | 6.2186 × 10−6 | 3.0263 × 10−4 | 1.1494 × 10−4 | 5.8987 × 10−9 |
| PSO-LSSVM | 9.9424 × 10−7 | 2.1566 × 10−4 | 3.4931 × 10−5 | 1.7494 × 10−9 |
| ELM | 1.0264 × 10−7 | 1.2989 × 10−4 | 2.0954 × 10−5 | 8.1310 × 10−10 |
| CSA-simplex-KELM | 1.5497 × 10−6 | 2.3419 × 10−4 | 4.5105 × 10−5 | 2.0150 × 10−9 |
| Temperature Compensation Methods | Err (min) | Err (max) | Err (mean) | Err (variance) |
|---|---|---|---|---|
| BP | 7.3618 × 10−8 | 5.3030 × 10−4 | 1.4749 × 10−4 | 1.6054 × 10−8 |
| RBF | 2.3279 × 10−8 | 2.0774 × 10−4 | 7.0203 × 10−5 | 3.5305 × 10−9 |
| PSO-SVM | 3.1682 × 10−6 | 2.9965 × 10−4 | 1.1040 × 10−4 | 5.0093 × 10−9 |
| PSO-LSSVM | 3.4454 × 10−7 | 2.8042 × 10−4 | 3.6780 × 10−5 | 2.1839 × 10−9 |
| ELM | 8.0991 × 10−7 | 2.5388 × 10−4 | 3.2806 × 10−5 | 2.2638 × 10−9 |
| CSA-simplex-KELM | 3.5241 × 10−6 | 2.4787 × 10−4 | 5.2075 × 10−5 | 1.8499 × 10−9 |
| Temperature Compensation Methods | Hidden Layer Node Number and Spread Parameter |
|---|---|
| BP | 8 |
| RBF | 176; spread:3.7 |
| ELM | 154 |
| CSA-simplex-KELM | 5 |
| Temperature Compensation Methods | Err (min) | Err (max) | Err (mean) | Err (variance) |
|---|---|---|---|---|
| BP | 7.9857 × 10−7 | 8.8874 × 10−4 | 1.3630 × 10−4 | 1.8544 ×10−8 |
| RBF | 3.0434 × 10−7 | 1.4557 × 10−3 | 1.7424 × 10−4 | 3.3145 × 10−8 |
| PSO-SVM | 5.0338 × 10−7 | 1.2871 × 10−3 | 2.9328 × 10−4 | 4.5771 × 10−8 |
| PSO-LSSVM | 6.2260 × 10−7 | 1.2025 × 10−3 | 1.4617 × 10−4 | 2.6931 × 10−8 |
| ELM | 7.1578 × 10−7 | 2.1745 × 10−3 | 2.4851 × 10−4 | 1.5724 × 10−7 |
| CSA-simplex-KELM | 1.4895 × 10−7 | 8.2560 × 10−4 | 1.3599 × 10−4 | 1.5597 ×10−8 |
| Temperature Compensation Methods | Err (min) | Err (max) | Err (mean) | Err (variance) |
|---|---|---|---|---|
| BP | 3.5195 × 10−7 | 1.4886 × 10−3 | 1.2296 × 10−4 | 1.4083 × 10−8 |
| RBF | 1.9854 × 10−8 | 1.2708 × 10−3 | 1.3248 × 10−4 | 1.6446 × 10−8 |
| PSO-SVM | 4.7972 × 10−8 | 1.2538 × 10−3 | 2.7009 × 10−4 | 3.5158 × 10−8 |
| PSO-LSSVM | 1.5621 × 10−7 | 9.6256 × 10−4 | 9.5755 × 10−5 | 1.1373 × 10−8 |
| ELM | 4.6555 × 10−9 | 1.8777 × 10−3 | 1.1114 × 10−4 | 5.3387 × 10−8 |
| CSA-simplex-KELM | 3.2846 × 10−7 | 1.0836 × 10−3 | 1.1019 × 10−4 | 1.0429 × 10−8 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Hu, G.; Zhou, Y.; Zou, C.; Peng, W.; Alam SM, J. Study on Temperature and Synthetic Compensation of Piezo-Resistive Differential Pressure Sensors by Coupled Simulated Annealing and Simplex Optimized Kernel Extreme Learning Machine. Sensors 2017, 17, 894. https://doi.org/10.3390/s17040894
Li J, Hu G, Zhou Y, Zou C, Peng W, Alam SM J. Study on Temperature and Synthetic Compensation of Piezo-Resistive Differential Pressure Sensors by Coupled Simulated Annealing and Simplex Optimized Kernel Extreme Learning Machine. Sensors. 2017; 17(4):894. https://doi.org/10.3390/s17040894
Chicago/Turabian StyleLi, Ji, Guoqing Hu, Yonghong Zhou, Chong Zou, Wei Peng, and Jahangir Alam SM. 2017. "Study on Temperature and Synthetic Compensation of Piezo-Resistive Differential Pressure Sensors by Coupled Simulated Annealing and Simplex Optimized Kernel Extreme Learning Machine" Sensors 17, no. 4: 894. https://doi.org/10.3390/s17040894
APA StyleLi, J., Hu, G., Zhou, Y., Zou, C., Peng, W., & Alam SM, J. (2017). Study on Temperature and Synthetic Compensation of Piezo-Resistive Differential Pressure Sensors by Coupled Simulated Annealing and Simplex Optimized Kernel Extreme Learning Machine. Sensors, 17(4), 894. https://doi.org/10.3390/s17040894