
A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations


Abstract
:1. Introduction
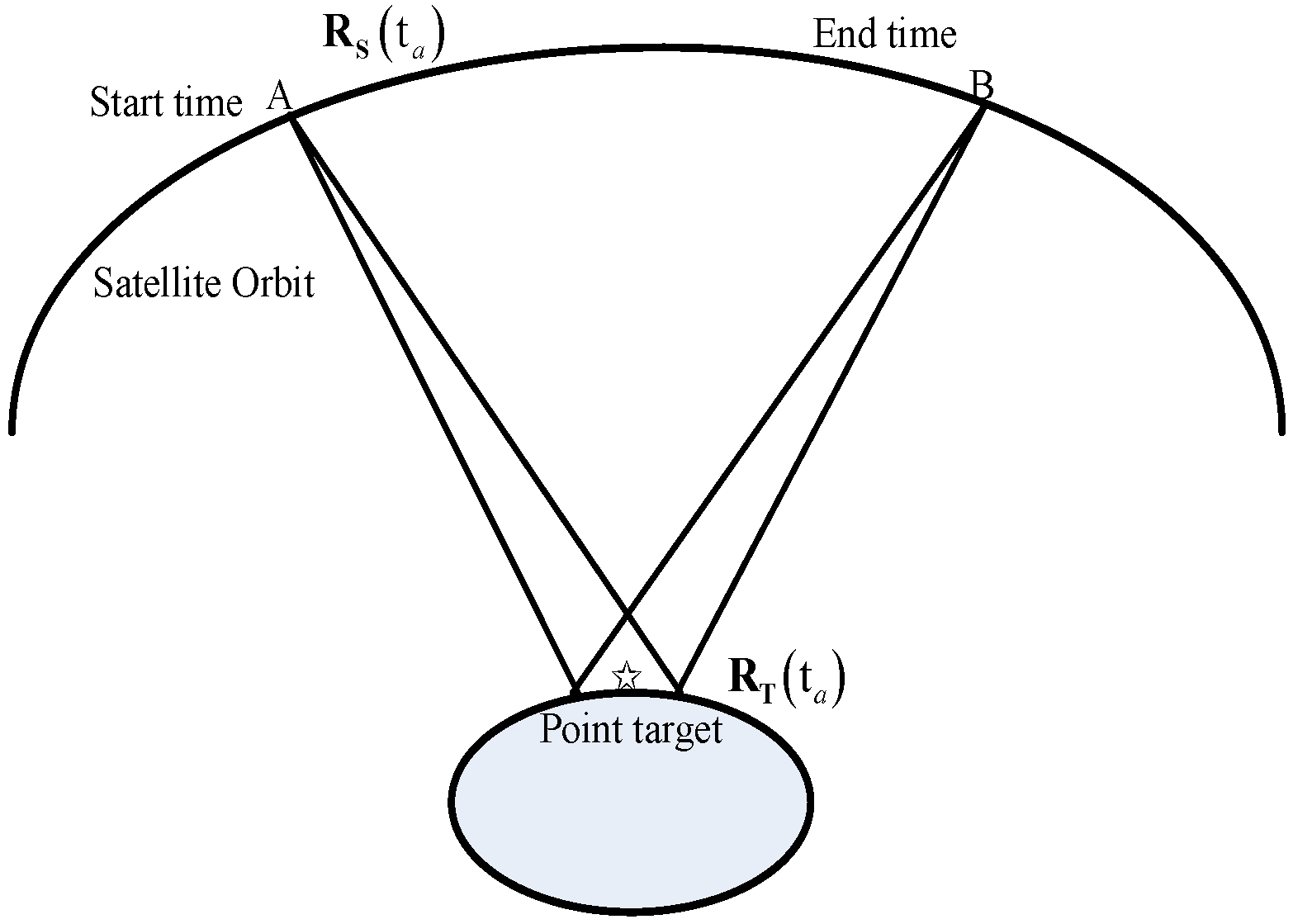
2. Signal Model for GEO SAR Staring Observation
3. Two-Dimensional Spectrum Analysis
4. Imaging Algorithm
4.1. Azimuth Preprocessing
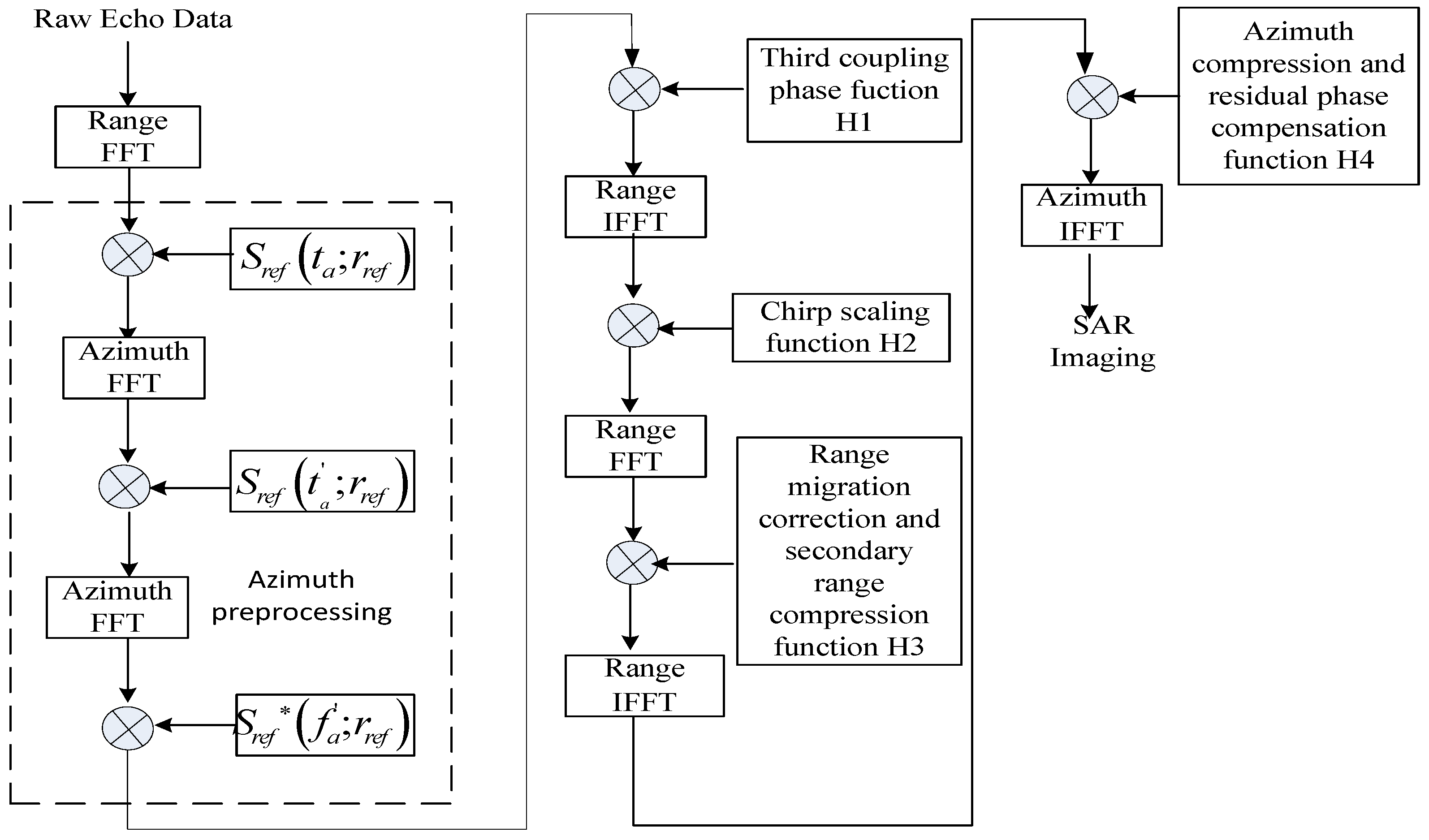
4.2. Improved CS Algorithm
5. Simulation Results
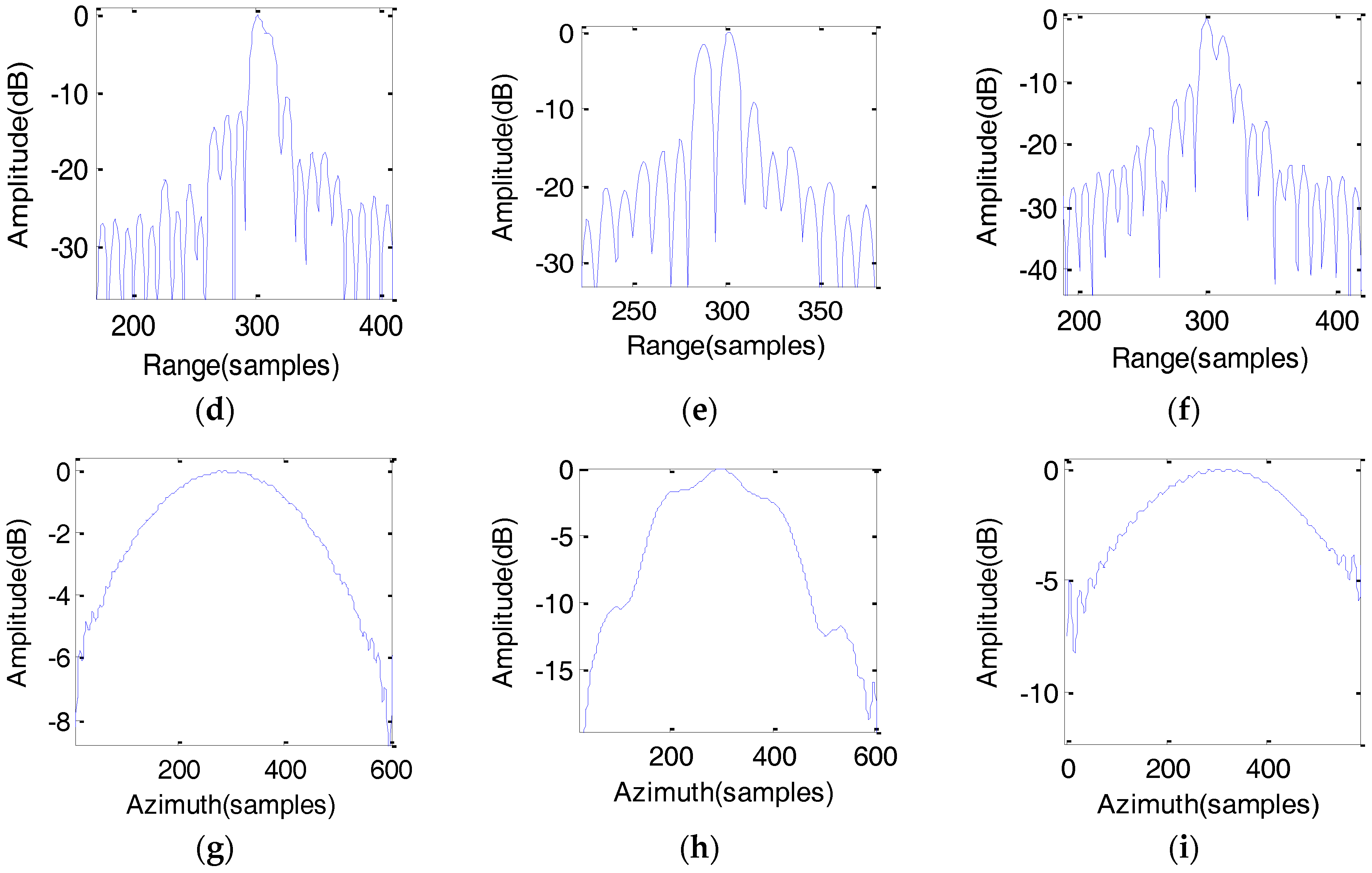
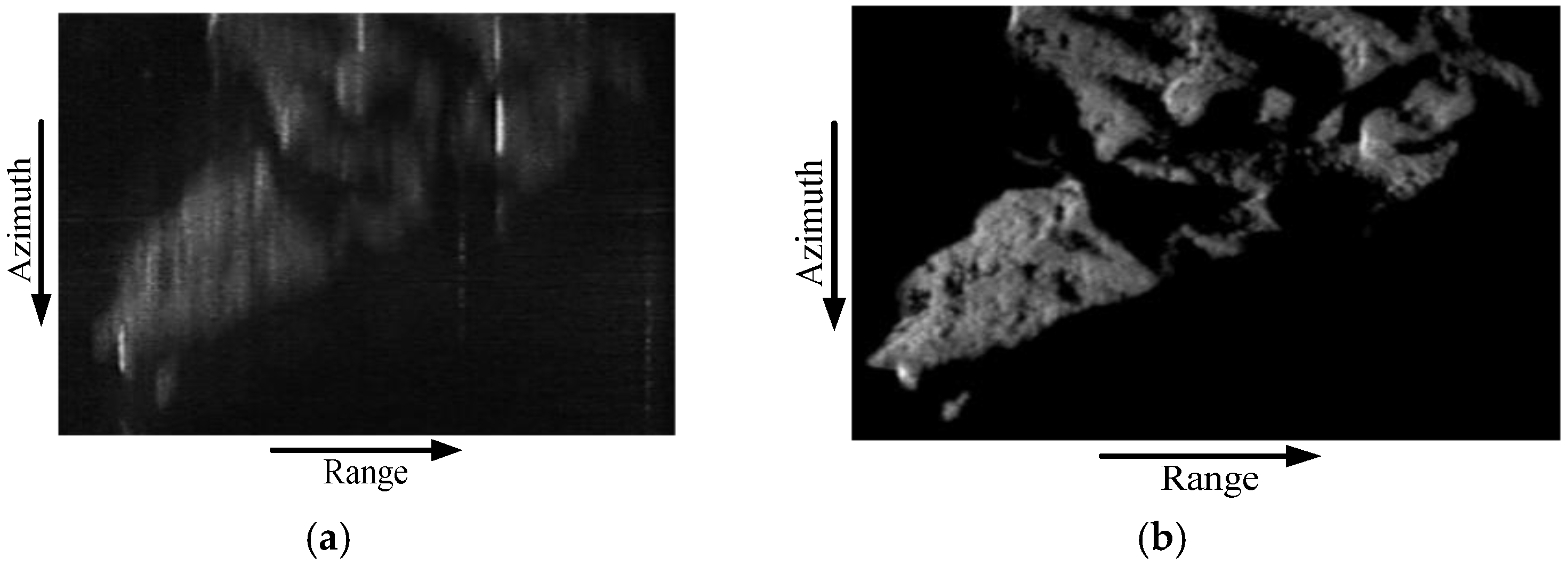
5.1. Simulation Results of the Conventional Algorithm
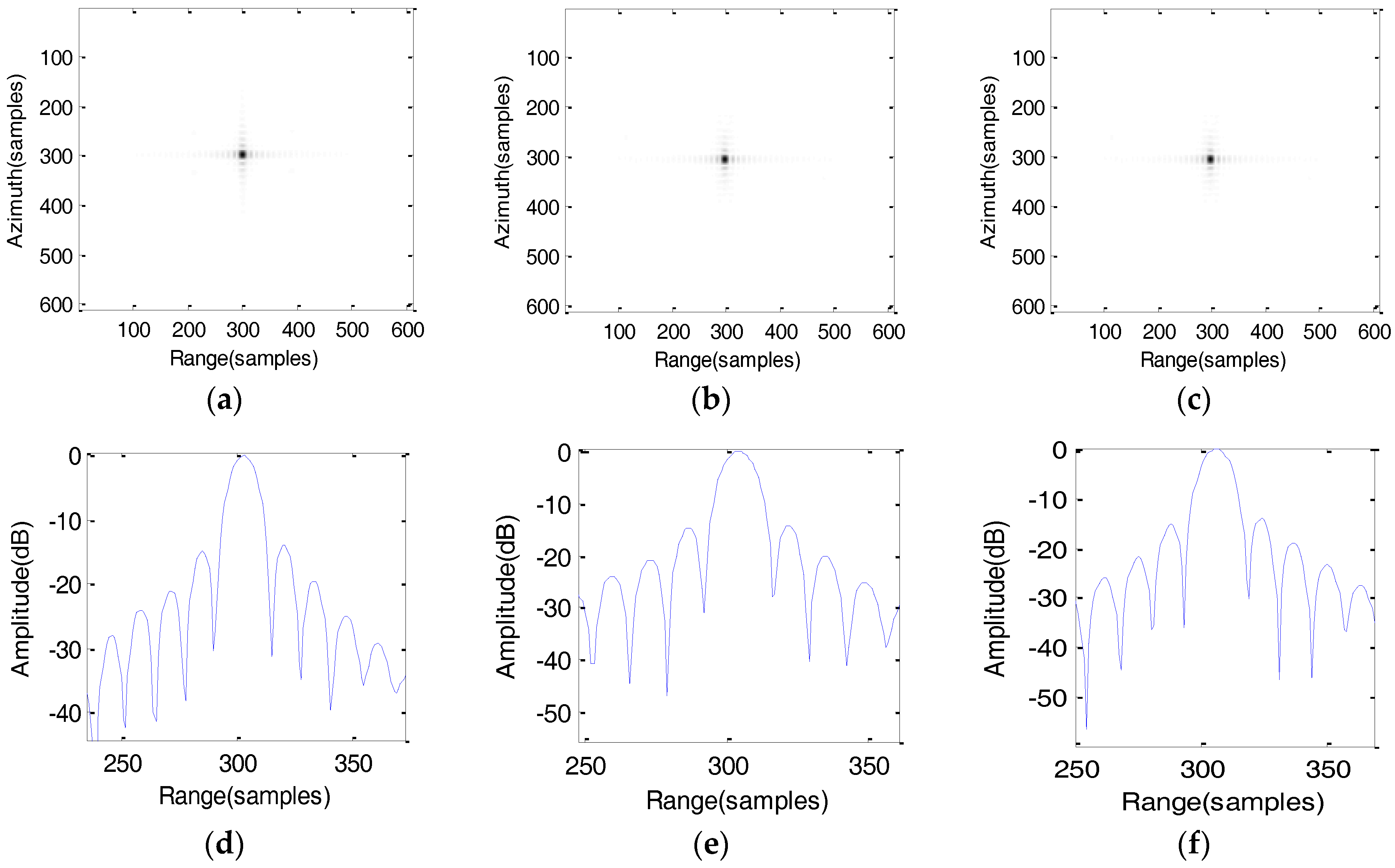
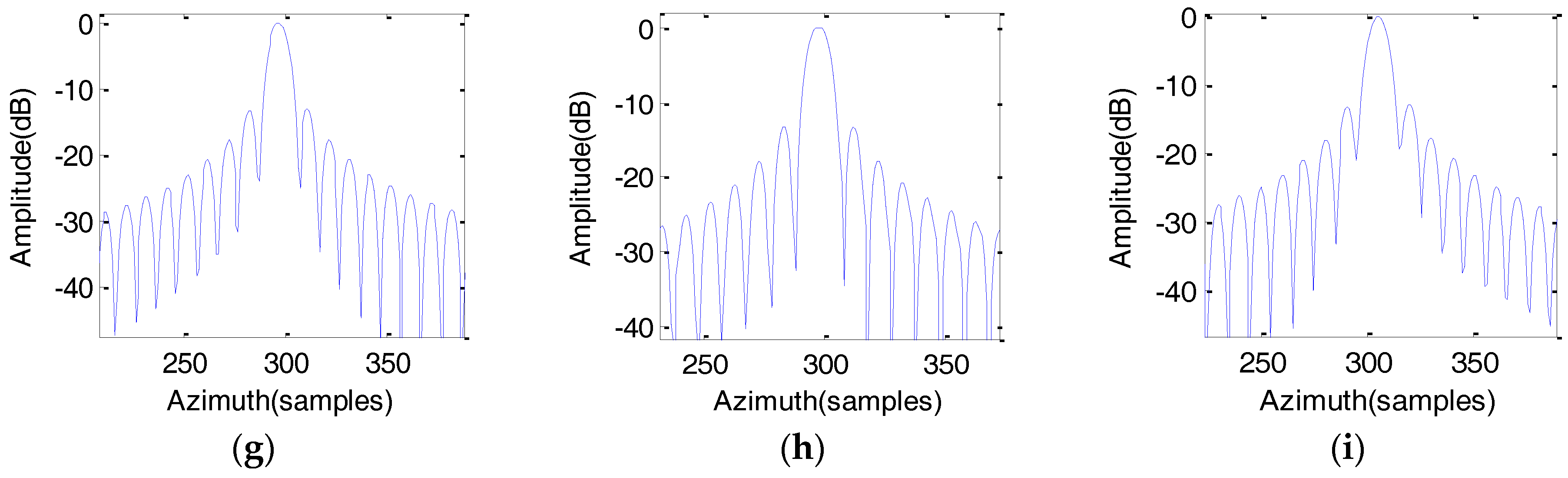
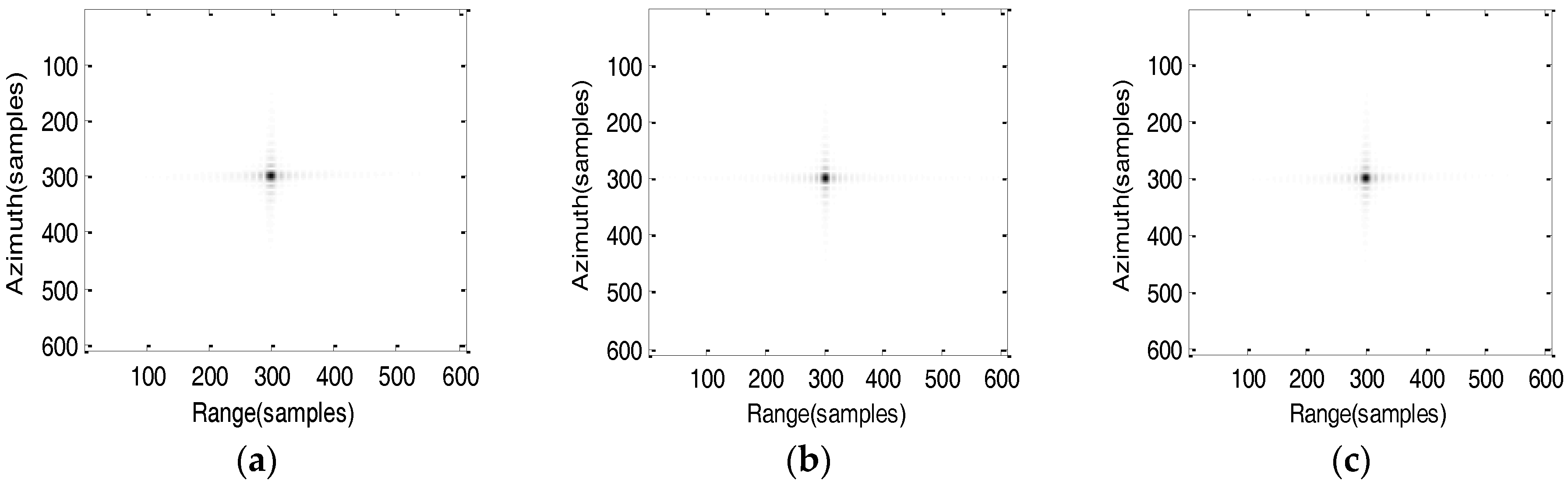
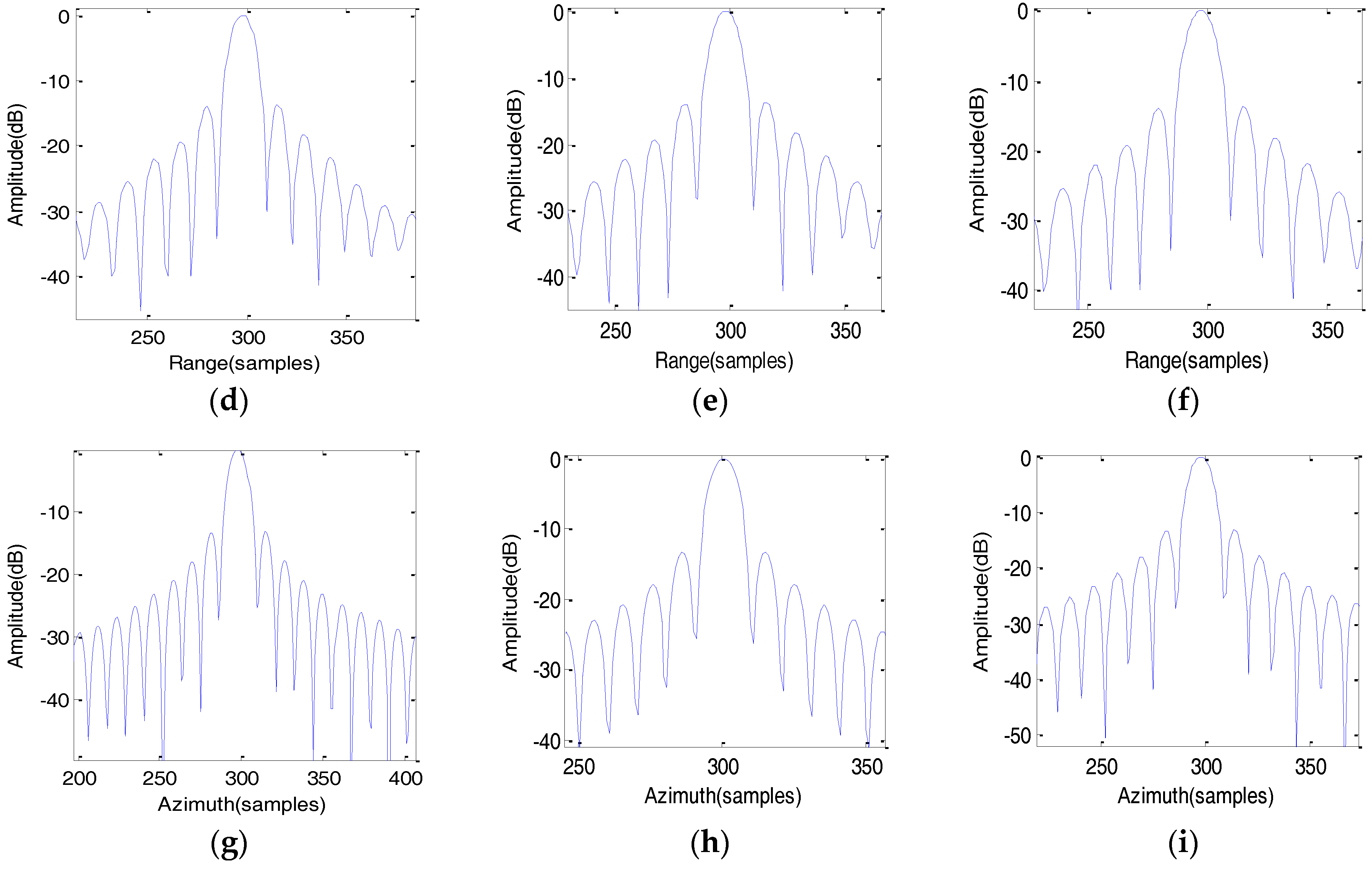
5.2. Simulation Results of the Improved Algorithm
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Disaster Monitoring by Extracting Geophysical Parameters from SAR Data. In Proceedings of the IGARSS, Barcelona, Spain, 23–28 July 2007; pp. 4949–4952. [Google Scholar]
- Heygster, G.; Dannenberg, J.; Notholt, J. Topographic Mapping of the German Tidal Flats Analyzing SAR Images with the Waterline Method. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1019–1030. [Google Scholar] [CrossRef]
- Srivastava, H.S.; Patel, P.; Sharma, Y.; Navalgund, R.R. Large-area soil moisture estimation using multi-incidence-angle RADARSAT-1 SAR data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2528–2535. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Kurosu, T.; Fujita, M.; Chiba, K. Monitoring of rice crop growth from space using the ERS-1 C-band SAR. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1092–1096. [Google Scholar] [CrossRef]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K. The BIOMASS mission: Mapping global forest biomass to better understand the terrestrial carbon cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Henderson, F.M.; Lewis, A.J. Radar Detection of Wetland Ecosystems: A Review. Int. J. Remote Sens. 2008, 29, 5809–5835. [Google Scholar] [CrossRef]
- Sadjadi, F. New Comparative Experiments in Range Migration Mitigation Methods Using Polarimetric Inverse Synthetic Aperture Radar Signatures of Small Boats. In Proceedings of the IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 0613–0616. [Google Scholar]
- Sadjadi, F. Radar beam sharpening using an optimum FIR filter. Circuits Syst. Signal Process. 2000, 19, 121–129. [Google Scholar] [CrossRef]
- Sadjadi, F.A. New Experiments in Inverse Synthetic Aperture Radar Image Exploitation for Maritime Surveillance. In Proceedings of the Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series, Baltimore, MD, USA, 13 June 2014; p. 09. [Google Scholar]
- Hobbs, S.; Mitchell, C.; Forte, B.; Holley, R. System design for geosynchronous synthetic aperture radar missions. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7750–7763. [Google Scholar] [CrossRef]
- Tomiyasu, K.; Pacelli, J.L. Synthetic aperture radar imaging from an inclined geosynchronous orbit. IEEE Trans. Geosci. Remote Sens. 1983, 21, 324–329. [Google Scholar] [CrossRef]
- Bruno, D.; Hobbs, S.E.; Ottavianelli, G. Geosynchronous synthetic aperture radar: Concept design, properties and possible applications. Acta Astron. 2006, 59, 149–156. [Google Scholar] [CrossRef]
- Bruno, D.; Hobbs, S.E. Radar imaging from geosynchronous orbit: Temporal decorrelation aspects. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2924–2929. [Google Scholar] [CrossRef]
- Sheng, W.; Hobbs, S.E. Research on compensation of motion, Earthcurvature and tropospheric delay in GEO SAR. Acta Astron. 2011, 68, 2005–2011. [Google Scholar] [CrossRef]
- Ruiz-Rodon, J.; Broquetas, A.; Makhoul, E.; Monti Guarnieri, A. Nearly zero inclination geosynchronous SAR mission analysis with long integration time for earth observation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6379–6391. [Google Scholar] [CrossRef]
- Mittermayer, J.; Wollstadt, S.; Prats-Iraola, P.; Scheiber, R. The TerraSAR-X Staring Spotlight Mode Concept. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3695–3706. [Google Scholar] [CrossRef]
- Li, C.P.; He, M.Y. A novel attitude steering strategy for GEO SAR staring imaging. In Proceedings of the IEEE China SIP, Chengdu, China, 12–15 July 2015; pp. 630–634. [Google Scholar]
- Bao, M.; Xing, M. Chirp scaling algorithm for GEO SAR based on fourth-order range equation. Electron. Lett. 2012, 48, 56–57. [Google Scholar] [CrossRef]
- Hu, C.; Liu, Z.P.; Long, T. An improved CS algorithm based on the curved trajectory in geosynchronous SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 795–808. [Google Scholar] [CrossRef]
- Liu, Z.P.; Hu, C.; Zeng, T. Improved secondary range compression focusing method in GEO SAR’. In Proceedings of the IEEE ICASSP, Prague, Czech Republic, 22–27 May 2011; pp. 1373–1376. [Google Scholar]
- Hu, C.; Long, T.; Liu, Z.P.; Zeng, T. An improved frequency domain focusing method in geosynchronous SAR. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5514–5528. [Google Scholar]
- Hu, B.; Jiang, Y.C.; Zhang, S.; Zhang, Y. Generalized Omega-K Algorithm for Geosynchronous SAR Image Formation. IEEE Trans. Geosci. Remote Sens. Lett. 2015, 12, 2286–2290. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.D.; Wang, Y.; Yang, J. A 2-D space-variant chirp scaling algorithm based on the RCM equalization and subband synthesis to process geosynchronous SAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4868–4880. [Google Scholar]
- Zhao, B.J.; Han, Y.Z.; Gao, W.J.; Luo, Y.; Han, X. A New Imaging Algorithm for Geosynchronous SAR Based on the Fifth-Order Doppler Parameters. Prog. Electromagn. Res. B 2013, 55, 195–215. [Google Scholar] [CrossRef]
- Yu, Z.; Lin, P.; Xiao, P.; Kang, L.; Li, C. Correcting Spatial Variance of RCM for GEO SAR Imaging Based on Time-Frequency Scaling. Sensors 2016, 16, 1091. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Li, C.S.; Yu, Z.; Zhou, J.; Chen, J. Back projection algorithm for high resolution GEO-SAR image formation. In Proceedings of the IGARSS, Vancouver, BC, Canada, 24–29 July 2011; pp. 336–339. [Google Scholar]
- Ruiz Rodon, J.; Broquetas, A.; Monti Guarnieri, A.; Rocca, F. Geosynchronous SAR focusing with atmospheric phase screen retrieval and compensation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4397–4404. [Google Scholar] [CrossRef]
- Dong, X.; Hu, C.; Long, T.; Li, Y. Numerical Analysis of Orbital Perturbation Effects on Inclined Geosynchronous SAR. Sensors 2016, 16, 1420. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Tian, Y.; Zeng, T.; Long, T. Adaptive Secondary Range Compression Algorithm in Geosynchronous SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 1397–1413. [Google Scholar] [CrossRef]
- Jiang, M.; Hu, W.; Ding, C.; Liu, G. The effects of orbital perturbation on geosynchronous synthetic aperture radar imaging. IEEE Trans. Geosci. Remote Sens. 2015, 12, 1106–1110. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A. Spotlight SAR processing using the extended chirp scaling algorithm. In Proceedings of the IEEE IGARSS, Singapore, 3–8 August 1997; pp. 2021–2023. [Google Scholar]
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A. Processing of sliding spotlight and TOPS SAR data using baseband azimuth scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 70–780. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR data focusing based on a two-step processing approach. IEEE Trans. Geosci. Remote Sens. 2011, 39, 1993–2004. [Google Scholar] [CrossRef]
- Liu, F.F.; Ding, Z.G.; Zeng, T.; Long, T. Performance analysis of two-step algorithm in sliding spotlights space-borne SAR. In Proceedings of the Radar Conference, Washington, DC, USA, 10–14 May 2011; pp. 965–968. [Google Scholar]
- Sun, G.C.; Xing, M.D.; Wang, Y.; Wu, Y. Sliding spotlight and TOPS SAR data processing without subaperture. IEEE Trans. Geosci. Remote Sens. Lett. 2011, 8, 1036–1040. [Google Scholar] [CrossRef]
- Huang, L.J.; Qiu, X.L.; Hu, D.H.; Ding, C.B. Focusing of medium-earth-orbit SAR with advanced nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 500–508. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Orbit semi-major axis | 42,164 km |
| Orbit eccentricity | 0 |
| Orbit inclination | 20° |
| Argument of perigee | 95° |
| Right ascension of ascending node | 97° |
| Radar frequency | 1.25 GHz |
| Pulse repetition frequency | 90 Hz |
| Bandwidth | 80 MHz |
| Antenna beam width | 0.5° |
| Off-nadir angle | 3.5° |
| Target Positions | Proposed Algorithm | Algorithm in [19] | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Range | Azimuth | Range | Azimuth | |||||||||
| RZ (m) | PSLR (dB) | ISLR (dB) | RZ (m) | PSLR (dB) | ISLR (dB) | RZ (m) | PSLR (dB) | ISLR (dB) | RZ (m) | PSLR (dB) | ISLR (dB) | |
| T1 | 3.80 | −13.22 | −9.83 | 2.11 | −13.02 | −9.35 | 4.75 | −2.357 | −7.35 | 46 | −4.21 | −2.52 |
| T2 | 3.86 | −13.27 | −9.75 | 2.02 | −13.18 | −9.68 | 3.81 | −2.865 | 8.86 | 32 | −2.36 | 1.25 |
| T3 | 3.92 | −13.20 | −9.91 | 2.13 | −13.05 | −9.57 | 4.63 | −1.08 | −1.08 | 48 | −5.01 | −1.63 |
| Target Positions | Range | Azimuth | ||||
|---|---|---|---|---|---|---|
| RZ (m) | PSLR (dB) | ISLR (dB) | RZ (m) | PSLR (dB) | ISLR (dB) | |
| T1 | 3.82 | −13.08 | −9.52 | 2.35 | −13.20 | −9.45 |
| T2 | 3.93 | −13.19 | −9.69 | 2.27 | −13.16 | −9.71 |
| T3 | 4.01 | −13.06 | −9.65 | 2.47 | −13.03 | −9.35 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; He, M. A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations. Sensors 2017, 17, 1058. https://doi.org/10.3390/s17051058
Li C, He M. A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations. Sensors. 2017; 17(5):1058. https://doi.org/10.3390/s17051058
Chicago/Turabian StyleLi, Caipin, and Mingyi He. 2017. "A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations" Sensors 17, no. 5: 1058. https://doi.org/10.3390/s17051058
APA StyleLi, C., & He, M. (2017). A Generalized Chirp-Scaling Algorithm for Geosynchronous Orbit SAR Staring Observations. Sensors, 17(5), 1058. https://doi.org/10.3390/s17051058