
An Adaptive B-Spline Neural Network and Its Application in Terminal Sliding Mode Control for a Mobile Satcom Antenna Inertially Stabilized Platform


Abstract
:1. Introduction
2. Modeling of a Mobile Satcom Antenna
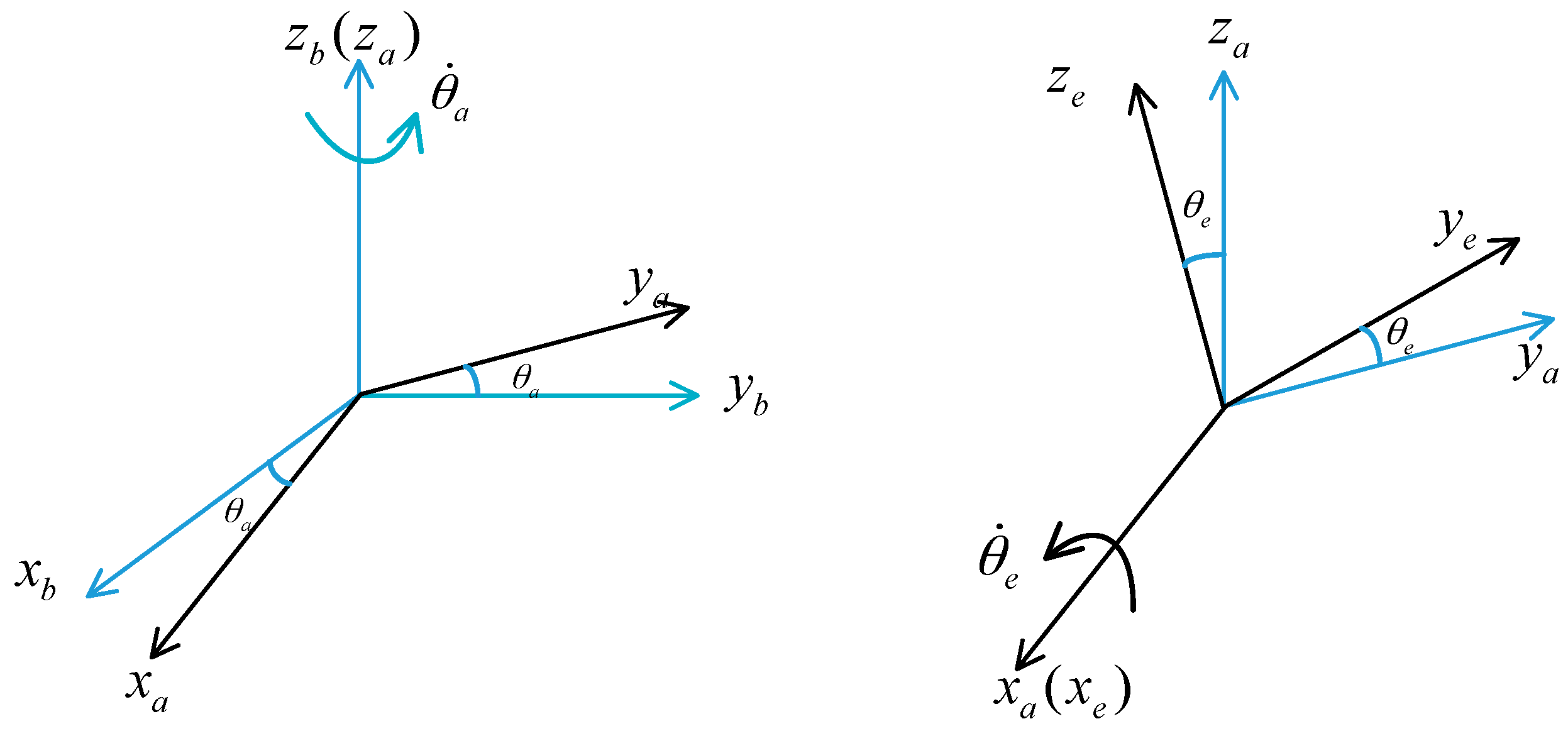
2.1. Gimbal Coordinates Definition
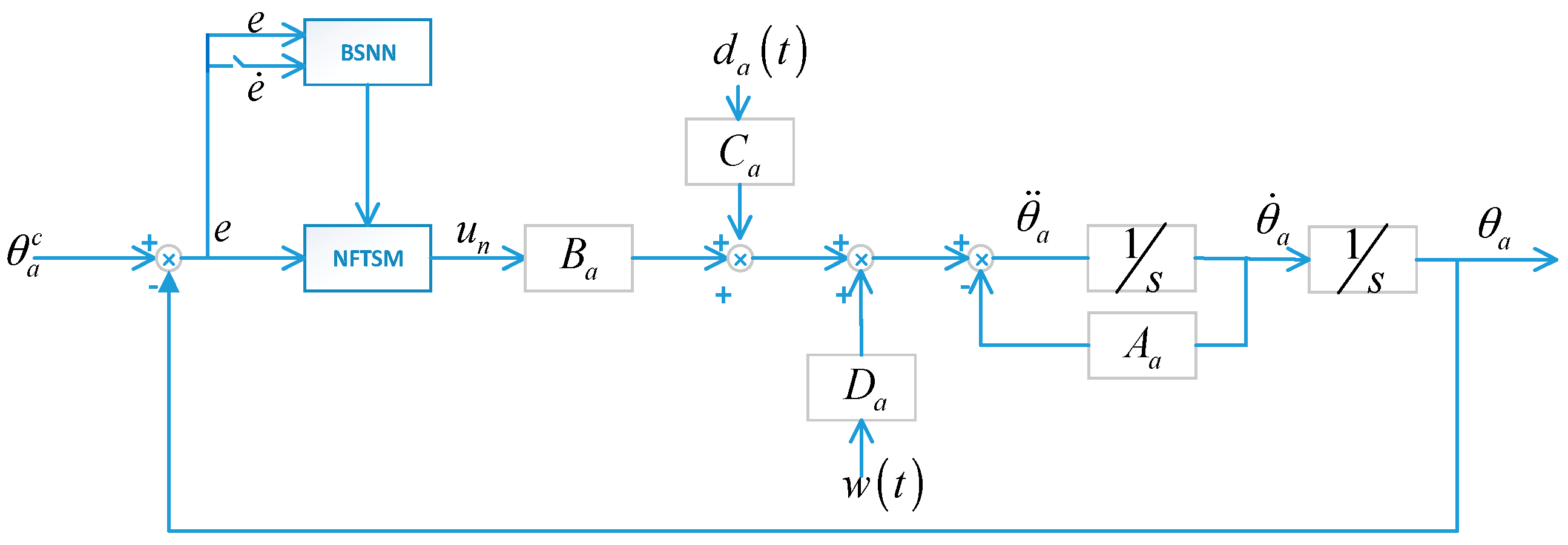
2.2. Dynamic of the Azimuth Gimbal
2.3. Non-Singularity Fast Terminal Sliding Mode
3. B-Spline Neural Network
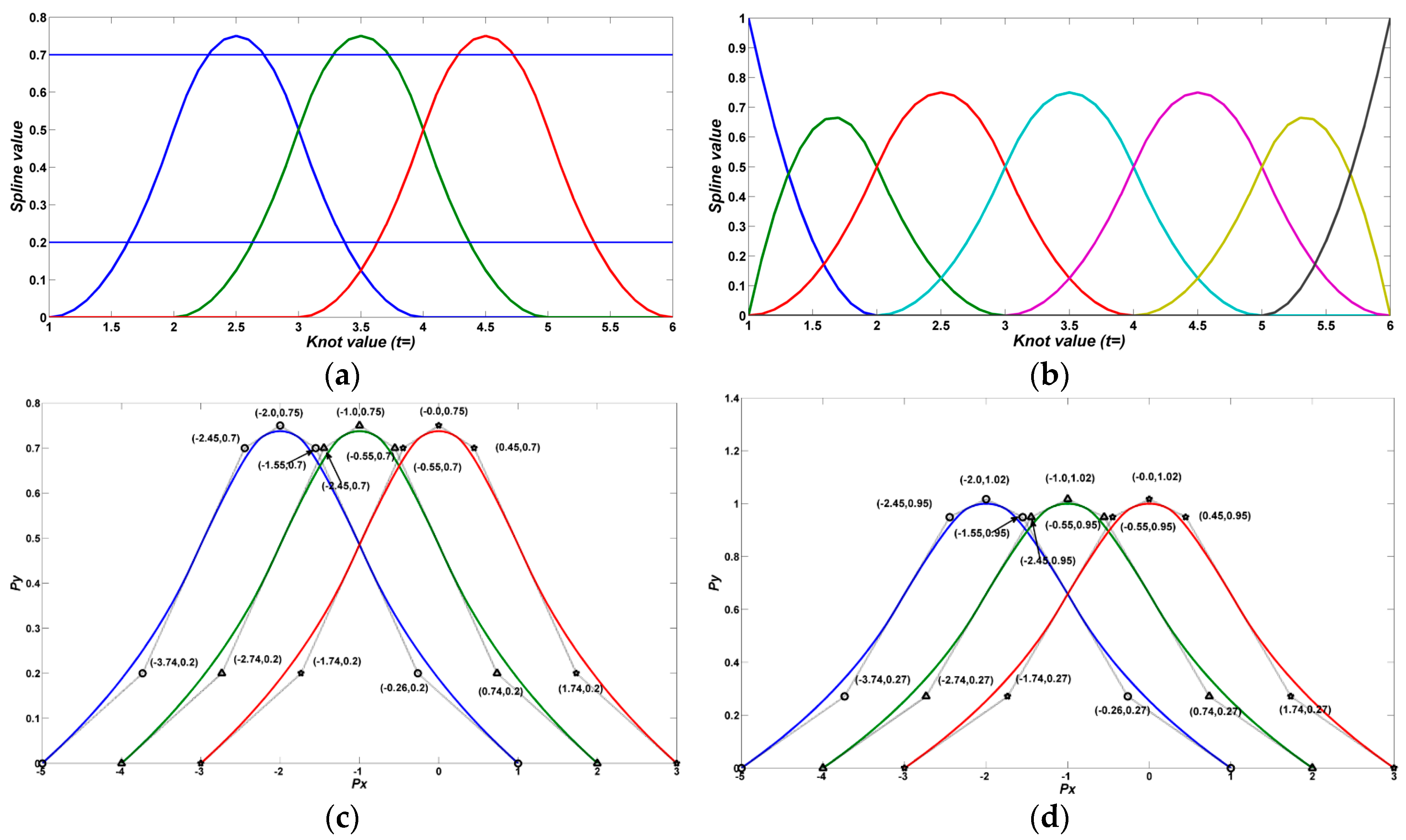
3.1. B-Spline Basis Function Definition
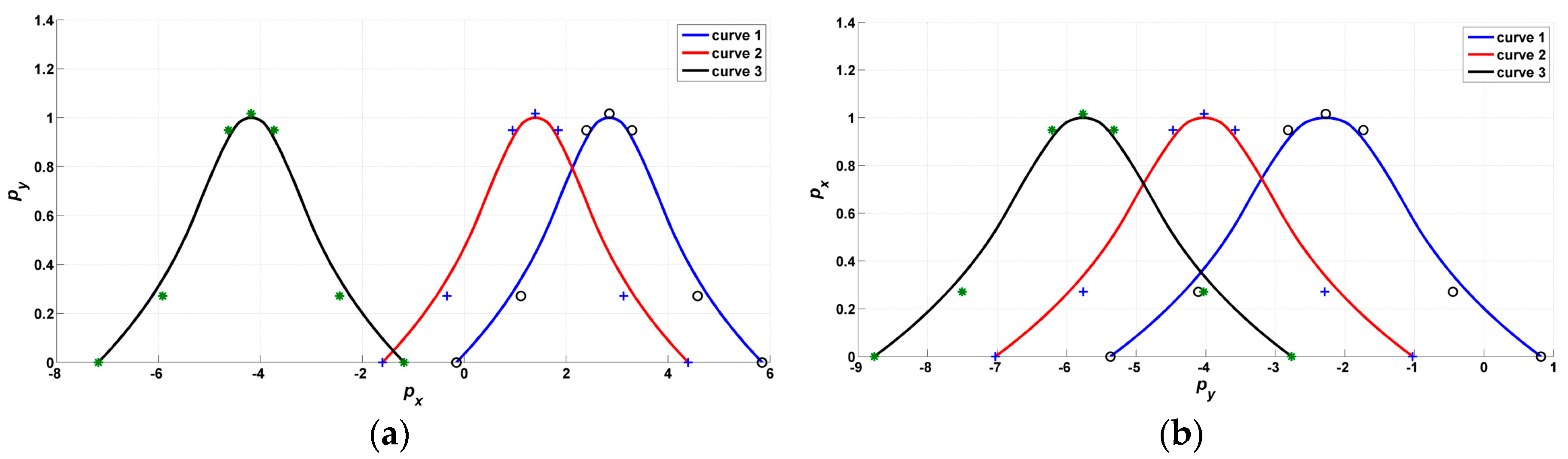
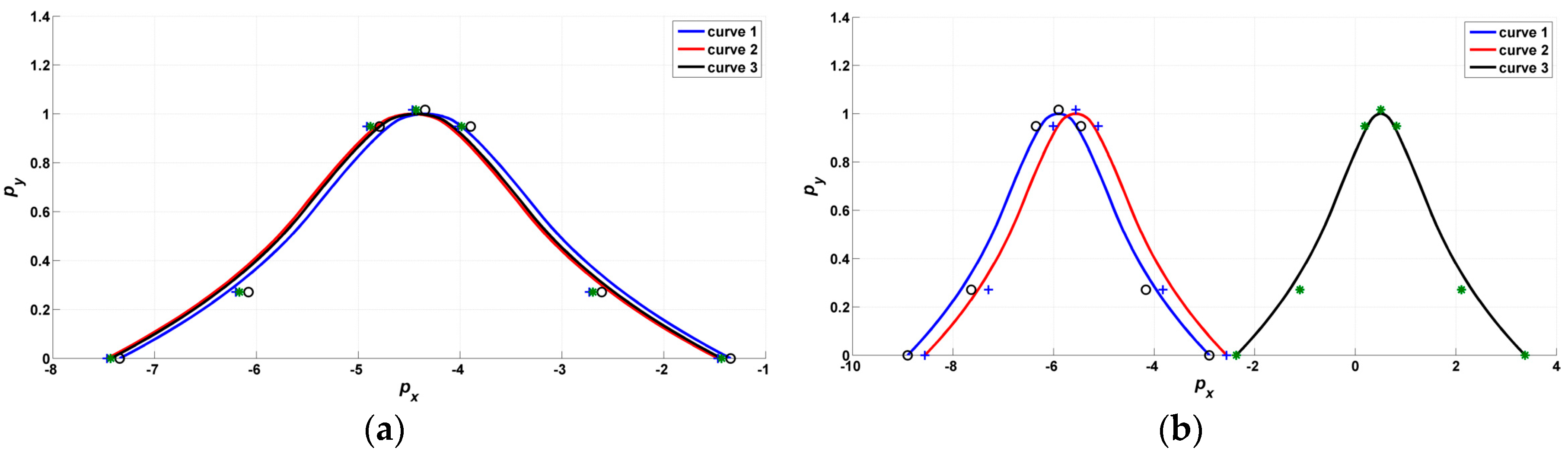
3.2. B-Spline Curve Definitions
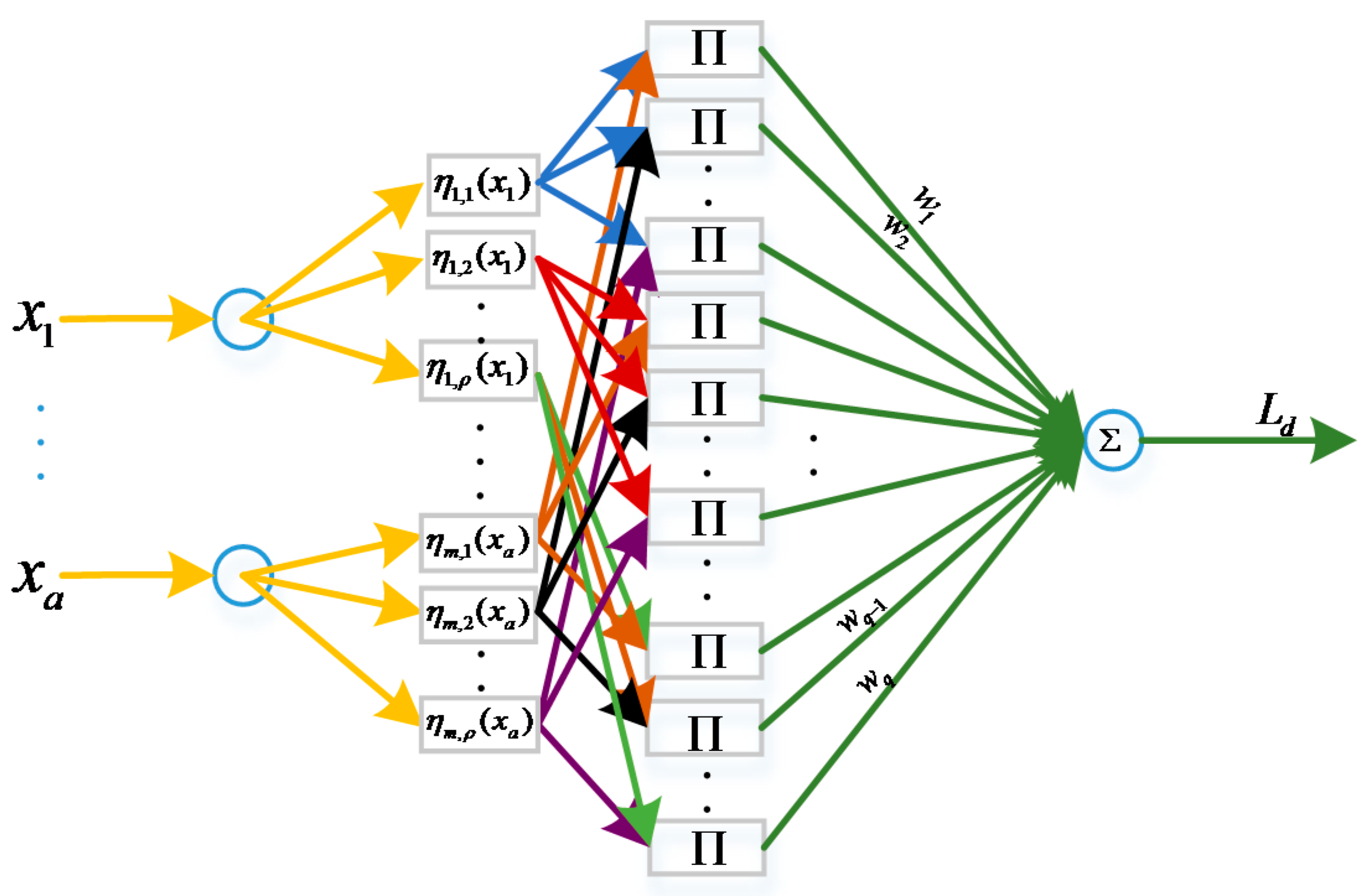
3.3. The B-Spline Neural Network
4. Results of Experiment and Simulation
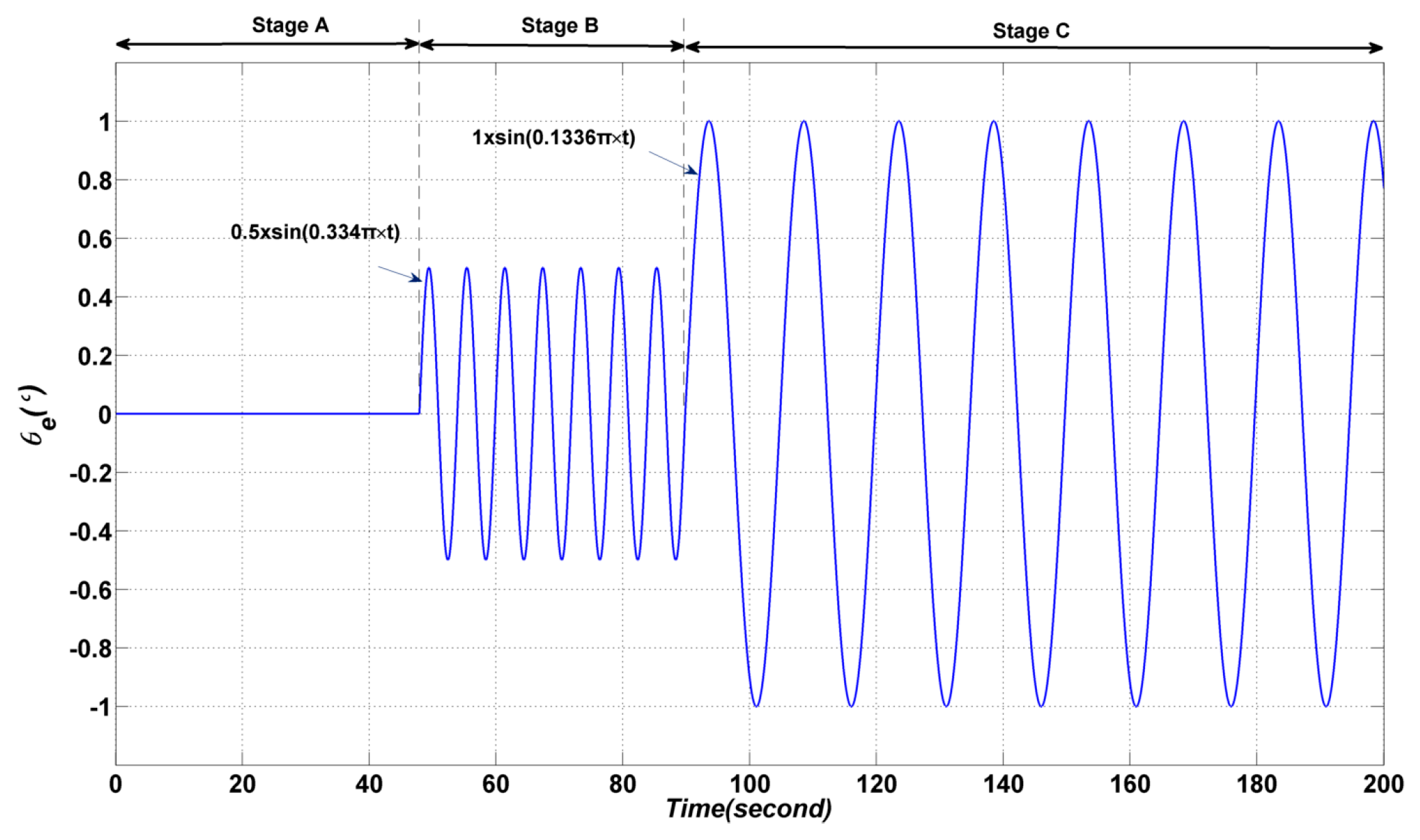
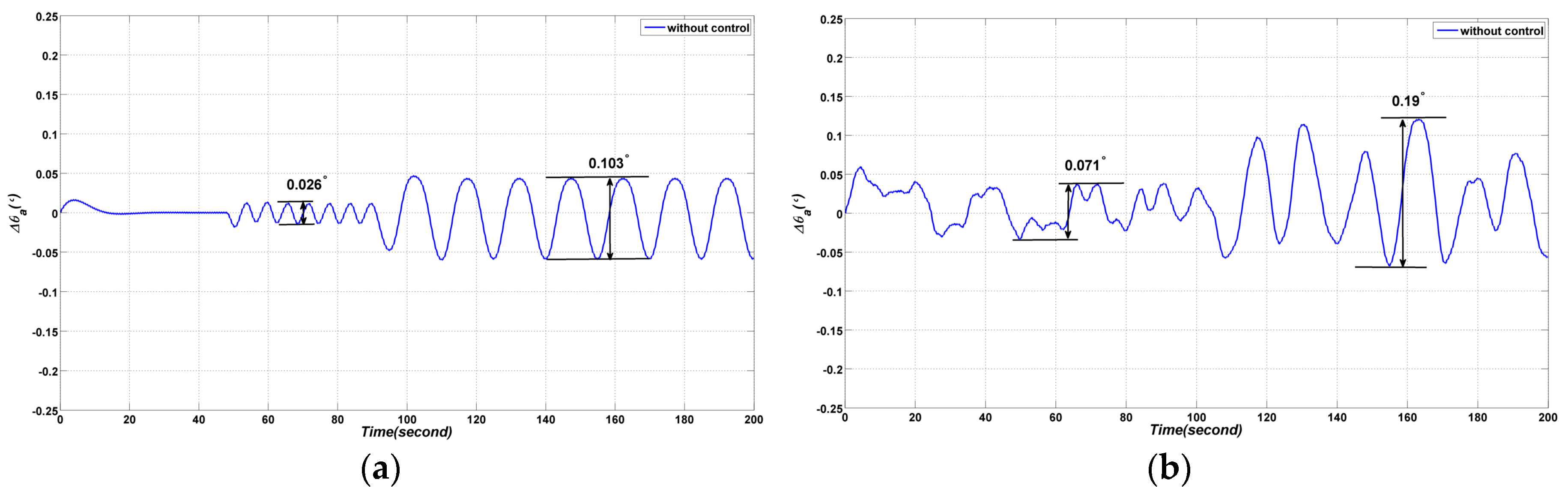
4.1. Description of the Coupling Effect
4.2. Description of De-Coupling Effect
4.2.1. Simulation Results
4.2.2. Experiment Results
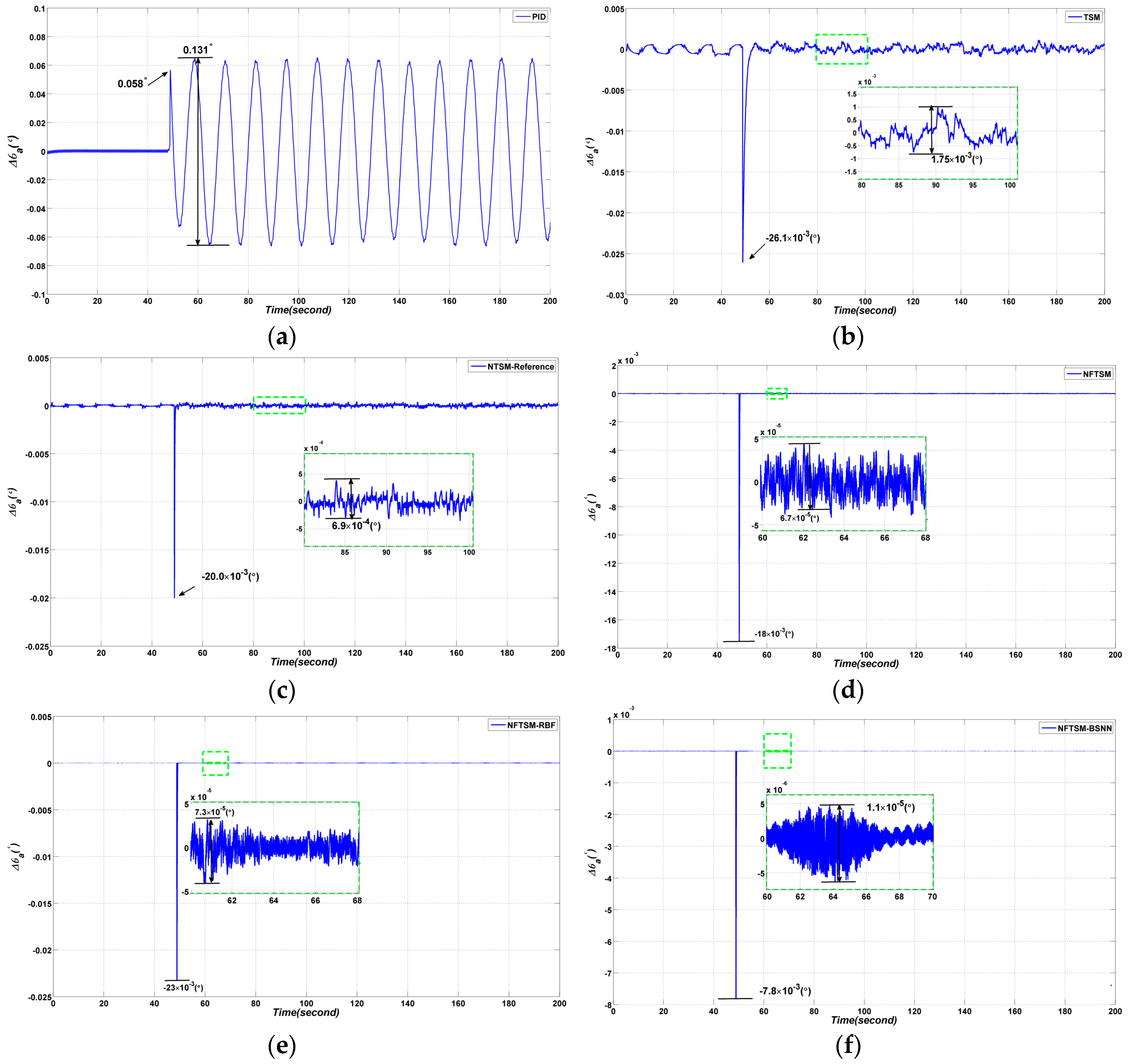
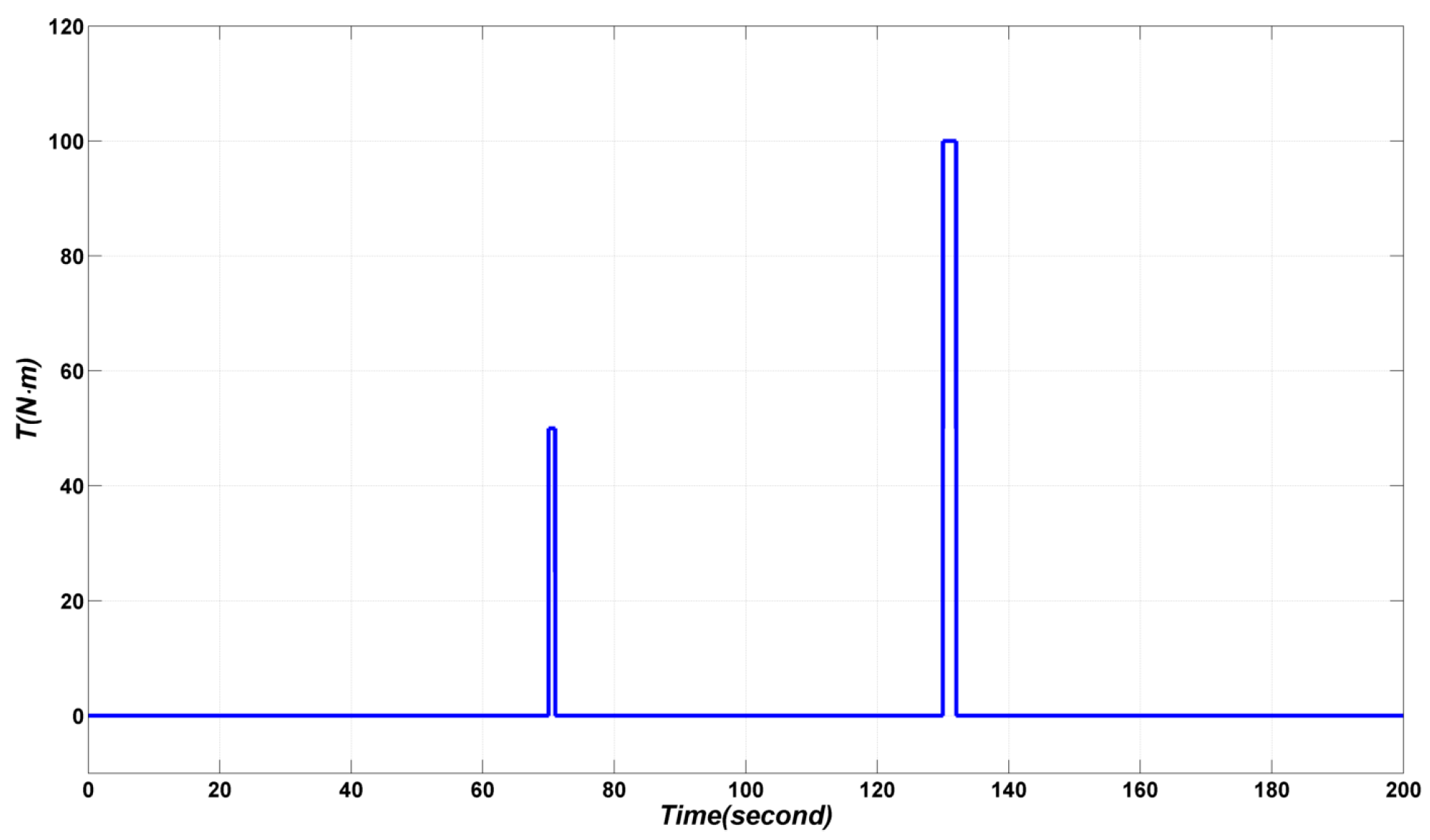
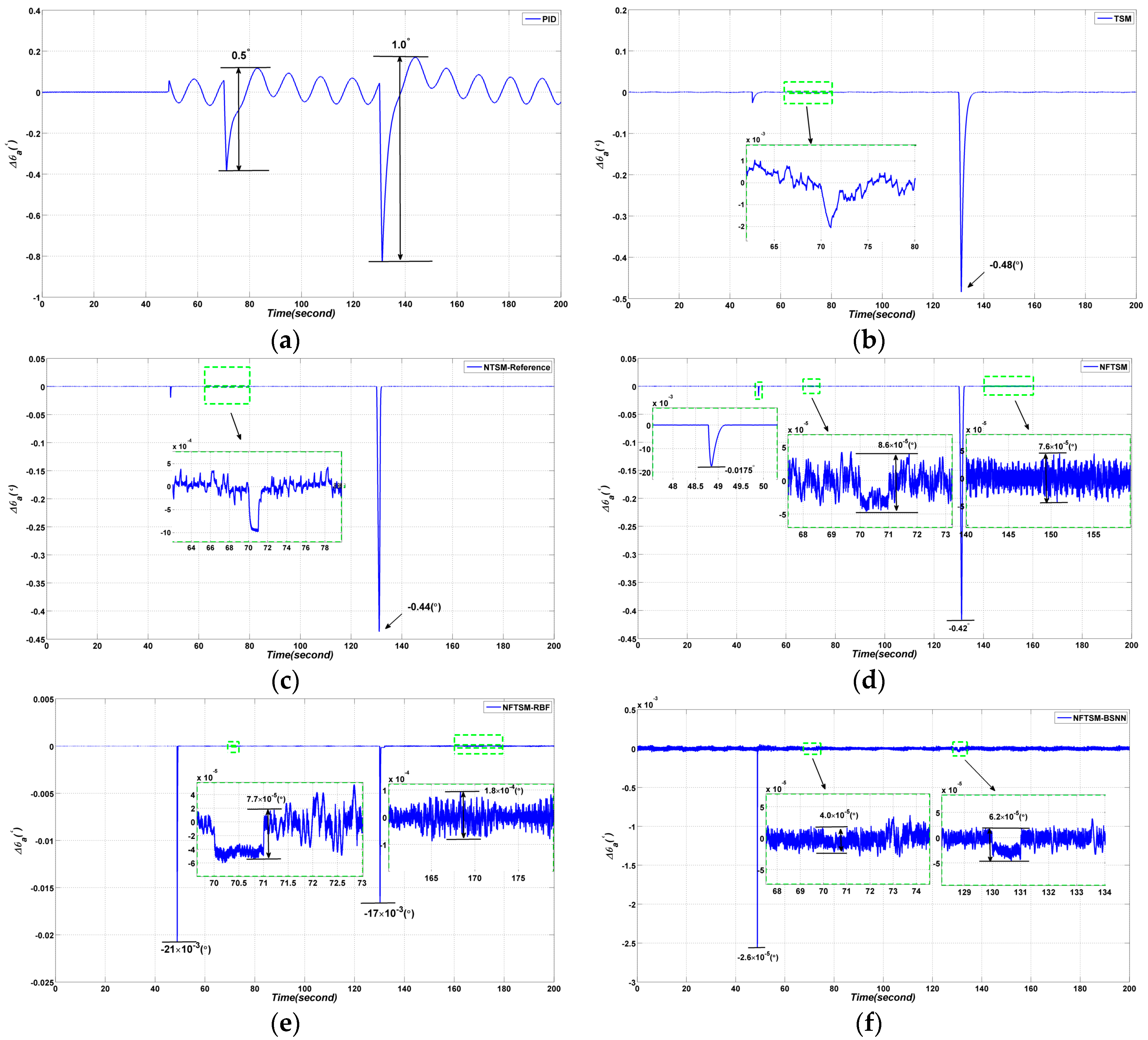
4.3. Disturbance Rejecting Ability Simulations and Experimental Results
4.3.1. Simulation Results
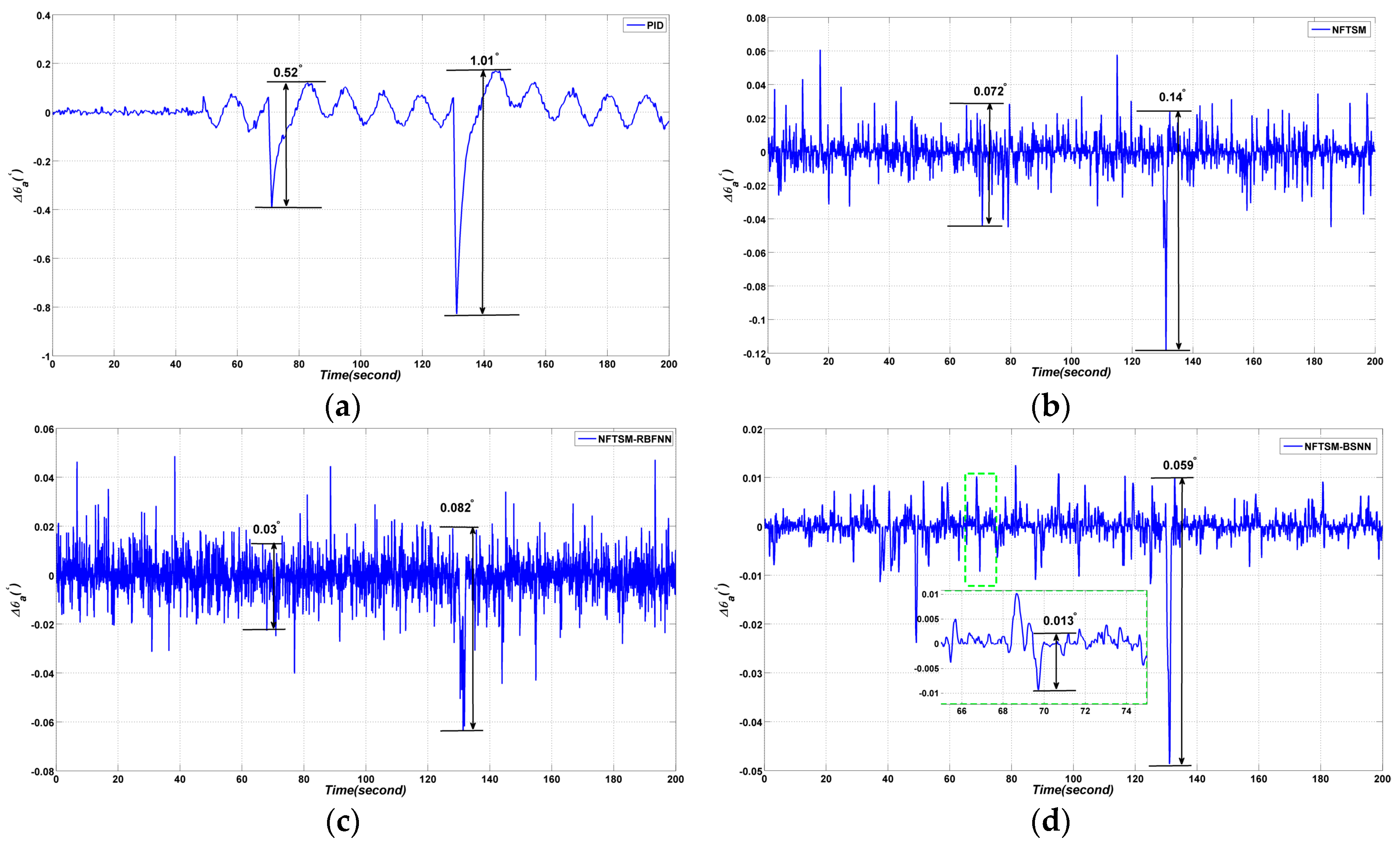
4.3.2. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Densmore, A.C.; Jamnejad, V. A satellite-tracking k- and ka-band mobile vehicle antenna system. IEEE Trans. Veh. Technol. 1993, 42, 502–513. [Google Scholar] [CrossRef]
- Cheng, W.; Minzhe, T.; Weizhou, S. An h2/h∞ control design for mobile satcom antenna servo systems. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; Volume 2016, pp. 3023–3028. [Google Scholar]
- Marsh, E.A. Inertially Stabilized Platforms for Satcom on-the-Move Applications: A Hybrid Open/Closed-Loop Antenna Pointing Strategy. Master’s degree, Massachusetts Institute of Technology, Cambridge, MA, USA, 2008. [Google Scholar]
- Debruin, J. Control systems for mobile satcom antennas. IEEE Control Syst. 2008, 28, 86–101. [Google Scholar] [CrossRef]
- Tian, F.; Wang, R.; Gao, F.; Yao, M. A beam stabilization algorithm based on nonlinear observer for low cost satcom-on-the-move. China Commun. 2014, 11, 16–22. [Google Scholar] [CrossRef]
- Rue, A.K. Stabilization of precision electrooptical pointing and tracking systems. IEEE Trans. Aerosp. Electr. Syst. 1969, AES-5, 805–819. [Google Scholar]
- Shuang, C.; Ke, D.; Shang, W. Modeling analysis on the gyro stabilized. Sci. Technol. Rev. 2011, 241, 1606–1615. [Google Scholar]
- Fang, J.; Yin, R.; Lei, X. An adaptive decoupling control for three-axis gyro stabilized platform based on neural networks. Mechatronics 2015, 27, 38–46. [Google Scholar] [CrossRef]
- Ito, K.; Maebashi, W.; Ikeda, J.; Iwasaki, M. Fast and precise positioning of rotary table systems by feedforward disturbance compensation considering interference force. In Proceedings of the IECON 2011 37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 3382–3387. [Google Scholar]
- Řezáč, M.; Hurák, Z. Vibration rejection for inertially stabilized double gimbal platform using acceleration feedforward. In Proceedings of the IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 363–368. [Google Scholar]
- Mu, Q.; Liu, G.; Lei, X. A RBFNN-based adaptive disturbance compensation approach applied to magnetic suspension inertially stabilized platform. Math. Probl. Eng. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- Moorty, J.A.R.K.; Marathe, R.; Sule, V.R. H∞ control law for line-of-sight stabilization for mobile land vehicles. Opt. Eng. 2002, 41, 41–45. [Google Scholar]
- Li, S.; Zhong, M.; Zhao, Y. Estimation and compensation of unknown disturbance in three-axis gyro-stabilized camera mount. Trans. Inst. Meas. Control 2014. [Google Scholar] [CrossRef]
- Ma, D.; Lin, H. Chattering-free nonsingular fast terminal sliding-mode control for permanent magnet synchronous motor servo system. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Zak, M. Terminal attractors for addressable memory in neural networks. Phys. Lett. A 1988, 133, 18–22. [Google Scholar] [CrossRef]
- Wu, Y.; Yu, X.; Man, Z. Terminal sliding mode control design for uncertain dynamic systems. Syst. Control Lett. 1998, 34, 281–287. [Google Scholar] [CrossRef]
- Madani, T.; Daachi, B.; Djouani, K. Non-singular terminal sliding mode controller: Application to an actuated exoskeleton. Mechatronics 2016, 33, 136–145. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Stonier, R. Continuous finite-time control for robotic manipulators with terminal sliding modes. In Proceedings of the 6th International Conference of Information Fusion, Budapest, Hungary, 15–17 October 2003; pp. 1957–1964. [Google Scholar]
- Ding, F.; Cui, Y.; Wang, C.; Zhang, X. Course control of air cushion vessel based on terminal sliding mode control with rbf neural network. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 3496–3502. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2015; pp. 213–249. [Google Scholar]
- Levant, A. Universal single-input-single-output (siso) sliding-mode controllers with finite-time convergence. IEEE Trans. Autom. Control 2001, 46, 1447–1451. [Google Scholar] [CrossRef]
- Aghababa, M.P. Design of a chatter-free terminal sliding mode controller for nonlinear fractional-order dynamical systems. Int. J. Control 2013, 86, 1744–1756. [Google Scholar] [CrossRef]
- Tran, M.D.; Kang, H.J. Adaptive terminal sliding mode control of uncertain robotic manipulators based on local approximation of a dynamic system. Neurocomputing 2017, 228, 231–240. [Google Scholar] [CrossRef]
- Jia, T.; Kang, G. An rbf neural network-based nonsingular terminal sliding mode controller for robot manipulators. In Proceedings of the 2012 Third International Conference on Intelligent Control and Information Processing (ICICIP), Dalian, China, 15–17 July 2012; pp. 72–76. [Google Scholar]
- Wang, H.; Yang, Z.; Zhou, Z. Rbf-based terminal sliding mode control for a class of underactuated mechanical system. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 664–667. [Google Scholar]
- Fang, Y.; Liu, L.; Li, J.; Xu, Y. Decoupling control based on terminal sliding mode and wavelet network for the speed and tension system of reversible cold strip rolling mill. Int. J. Control 2015, 88, 1–17. [Google Scholar] [CrossRef]
- Lin, C.K. Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks. IEEE Trans. Fuzzy Syst. 2006, 14, 849–859. [Google Scholar] [CrossRef]
- Ferch, M.; Zhang, J.; Knoll, A. Robot skill transfer based on B-Spline fuzzy controllers for force-control tasks. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 1172, pp. 1170–1175. [Google Scholar]
- Yiu, K.F.; Wang, S.; Teo, K.L.; Tsoi, A.C. Nonlinear system modeling via knot-optimizing B-Spline networks. IEEE Trans. Neural Netw. 2001, 12, 1013–1022. [Google Scholar] [PubMed]
- Cabrita, C.; Ruano, A.E.; Fonseca, C.M. Single and multi-objective genetic programming design for B-Spline neural networks and Neuro-Fuzzy systems. In Proceedings of the Ifac Workshop on Advanced Fuzzy-Neural Control, Valencia, Spain, 15–16 October 2001; pp. 75–80. [Google Scholar]
- Leandro, D.S.C.; Guerra, F.A. B-spline neural network design using improved differential evolution for identification of an experimental nonlinear process. Appl. Soft Comput. 2008, 8, 1513–1522. [Google Scholar]
- Qamar, S.; Khan, L.; Qamar, Z. Online adaptive full car active suspension control using b-spline fuzzy-neural network. In Proceedings of the 2013 11th International Conference on Frontiers of Information Technology (FIT), Islamabad, Pakistan, 16–18 December 2013; pp. 205–210. [Google Scholar]
- Qamar, S.; Khan, L.; Ali, S. Adaptive B-Spline based Neuro-Fuzzy control for full car active suspension system. Middle East J. Sci. Res. 2013, 16, 1348–1360. [Google Scholar]
- Wang, C.H.; Wang, W.Y.; Lee, T.T.; Tseng, P.S. Fuzzy B-Spline membership function and its applications in Fuzzy-Neural control. IEEE Trans. Syst. Man Cybern. 1995, 25, 841–851. [Google Scholar] [CrossRef]
- Mar, J.; Lin, F.J.; Lin, H.T.; Hsu, L.C. Evolutionary learning of BMF Fuzzy-Neural networks using a reduced-form genetic algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2003, 33, 966–976. [Google Scholar]
- Mao, J.; Wang, Y.; Sun, W. Remote sensing images classification using fuzzy B-Spline function neural network. J. Electr. Meas. Instrom. 2002, 3, 2159–2163. [Google Scholar]
- Coelho, L.D.S.; Pessôa, M.W. Nonlinear identification using a B-Spline neural network and chaotic immune approaches. Mech. Syst. Signal Proc. 2009, 23, 2418–2434. [Google Scholar] [CrossRef]
- Boor, C.D. A practical Guide to Splines/Arl De Boor; Wiley: Hoboken, NJ, USA, 1985. [Google Scholar]
- B-Splines. Available online: http://web.mit.edu/hyperbook/Patrikalakis-Maekawa-Cho/node16.html (accessed on 1 January 2017).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Unit | Parameters | Values | Unit | Parameters | Values | Unit |
|---|---|---|---|---|---|---|---|---|
| 0.51 | 0.54 | 0.59 | ||||||
| 1.49 | 1.56 | 1.42 | ||||||
| 0.96 | 1.37 | 2.8 | ||||||
| 0.42 | 0.42 | 1.23 | ||||||
| 0.3 | 0.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhao, Y.; Guo, K.; Li, G.; Deng, N. An Adaptive B-Spline Neural Network and Its Application in Terminal Sliding Mode Control for a Mobile Satcom Antenna Inertially Stabilized Platform. Sensors 2017, 17, 978. https://doi.org/10.3390/s17050978
Zhang X, Zhao Y, Guo K, Li G, Deng N. An Adaptive B-Spline Neural Network and Its Application in Terminal Sliding Mode Control for a Mobile Satcom Antenna Inertially Stabilized Platform. Sensors. 2017; 17(5):978. https://doi.org/10.3390/s17050978
Chicago/Turabian StyleZhang, Xiaolei, Yan Zhao, Kai Guo, Gaoliang Li, and Nianmao Deng. 2017. "An Adaptive B-Spline Neural Network and Its Application in Terminal Sliding Mode Control for a Mobile Satcom Antenna Inertially Stabilized Platform" Sensors 17, no. 5: 978. https://doi.org/10.3390/s17050978
APA StyleZhang, X., Zhao, Y., Guo, K., Li, G., & Deng, N. (2017). An Adaptive B-Spline Neural Network and Its Application in Terminal Sliding Mode Control for a Mobile Satcom Antenna Inertially Stabilized Platform. Sensors, 17(5), 978. https://doi.org/10.3390/s17050978