1. Introduction
The Global Navigation Satellite System (GNSS), using space satellites to achieve positioning and navigation, is widely used in civil and military applications, such as positioning, timing, and navigation. At present, the main GNSS in the world include the Global Positioning System (GPS) of the United States, the Global Navigation Satellites System (GLONASS) of Russia, the BeiDou Navigation Satellite System (BDS) of China and the Galileo Navigation Satellite System (Galileo) of the European Union [
1,
2]. However, their performance may be subject to the impact of environmental factors, including signal interference and dynamic factors. The Inertial Navigation System (INS) can provide continuous high-precision position, velocity and attitude data for a short time, but after a while gyro and accelerometer errors accumulate and the navigation errors grow. The integration of GNSS/INS has many peculiarities and offers a way for high-accurate positioning. There are three architectures of integrated navigation systems: loosely coupled, tightly coupled and deeply coupled (also called ultra-tightly coupled) [
3,
4,
5]. The deeply coupled integration has been widely studied in recent years, due to the fact that it can achieve the fusion of GNSS and INS information at the signal processing level. What’s more, it has better performances in highly dynamic environments due to the adaptable dynamic characteristics of INS. However, most research about GNSS/INS integration is concentrated on integration architectures and solutions instead of the signal acquisition issues.
Acquisition is the first step of the signal processing for a GNSS receiver, and it is a time-consuming process. Under highly dynamic conditions, the Doppler shift between the carrier and the satellite changes greatly, resulting in a larger frequency search range and longer search time. According to the nature of signal acquisition, the common approach for improving signal acquisition performance is by reducing the carrier frequency and code phase search range. Compared with unaided acquisition methods, the INS-aided acquisition has many advantages under highly dynamic and harsh environment conditions, such as the lower C/N
0 (carrier to noise ratio) signal acquisition for the higher sensitivity receivers, and the accurate estimation of Doppler frequency shift and code phase to reduce the search space [
6,
7]. Because of these outstanding performance features, it has been studied for many different applications [
7,
8,
9,
10,
11].
Progri and Alban made the effort to investigate the methodology of the Doppler estimation [
12,
13]. In [
14], the effects of IMU accuracy on the Doppler estimation error were analyzed. Ye and He presented the INS-aided acquisition scheme and analyzed the acquisition performance [
15,
16]. Reference [
17] presented a fast acquisition method for GPS receivers aided by INS information and performed acquisition experiment under low dynamics. However, the addressed methods have some disadvantages: (i) the traditional INS-aided acquisition mostly uses INS velocity information to estimate the carrier Doppler frequency shift without reducing the uncertainty of code phase search; (ii) the mathematical model of Doppler shift and code phase estimation errors contributed by the INS velocity error and position error were not derived in detail; (iii) the literature has been focused on low dynamics, and not on high dynamics situations. Hence, due to the small Doppler shift caused by low dynamics, the former studies have had limited success in proving any INS-aided acquisition performance improvement. Furthermore, concerning the limitations under high dynamics, there is a little related literature. Thus, the performance analysis of GNSS signal acquisition aided by different grade INS under high dynamic conditions is still necessary.
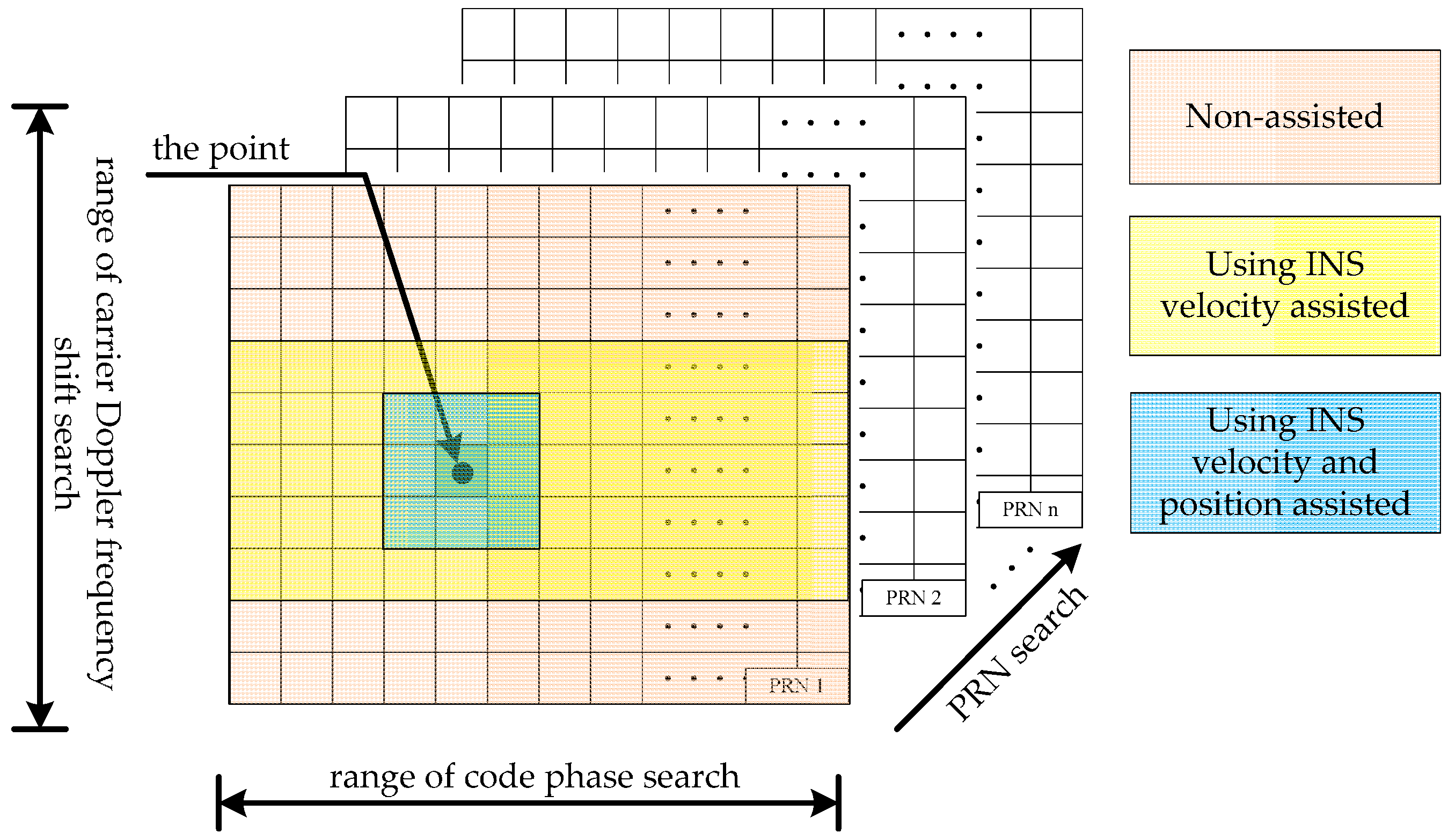
Figure 1 illustrates in a schematic diagram the search scope under three conditions: non-assisted acquisition, INS velocity-assisted acquisition and INS velocity, position-assisted acquisition. Both the range of carrier Doppler frequency and code phase are reduced by using INS velocity- and position-assisted acquisition.
The Doppler frequency shift is related to the relative position and velocity of the receiver with respect to the transmitter. The former research mainly concentrated in low dynamic environments, such as vehicles and handheld devices. The velocity and position changes are small under such conditions, so the Doppler frequency shift is relatively small. However, in a high dynamics environment, such as missiles and aircrafts, the Doppler frequency shift is large. Therefore, this paper defines a high dynamic scene which includes acceleration, uniform motion, turning and climbing. In this high dynamic scene, the GNSS acquisition performance aided by different grade INS can be fully verified.
In the INS-aided acquisition, the INS accuracy has crucial effects on the Doppler and the code phase estimation errors. Different grade INS devices afford different velocity errors and position errors. In order to analyze the influence of different INS grades on acquisition performance, the mathematical model between them is deduced in detail. Furthermore, the relationships between INS accuracy, Doppler estimation error, code phase error and acquisition performance are verified by signal acquisition experiments which use the trajectory of the above high dynamic scene. Finally, the influences of different grades of INS on the acquisition performance and the tracking performance are analyzed.
BDS is the independently developed Chinese global navigation satellite system, which has many similarities with GPS. Based on the analysis of the characteristics of GPS L1 frequency and BDS B1I signals modulation, the INS-aided acquisition performance is proved by using GPS/BDS dual-mode software receiver.
This paper is structured as follows:
Section 2 shows the characteristics of the GPS L1 and BDS B1 signals, and then presents the INS-aided acquisition methodology. In
Section 3, the frequency shift and code phase estimation theory are described. In
Section 4, the Doppler shift estimation error and the code phase estimation error caused by INS velocity error and position error are derived in detail. Furthermore, the acquisition experiments assisted with different grade INS under high dynamics are performed in
Section 5. In
Section 6, the final conclusions are given.
4. Doppler Shift Estimation Error and Code Phase Estimation Error
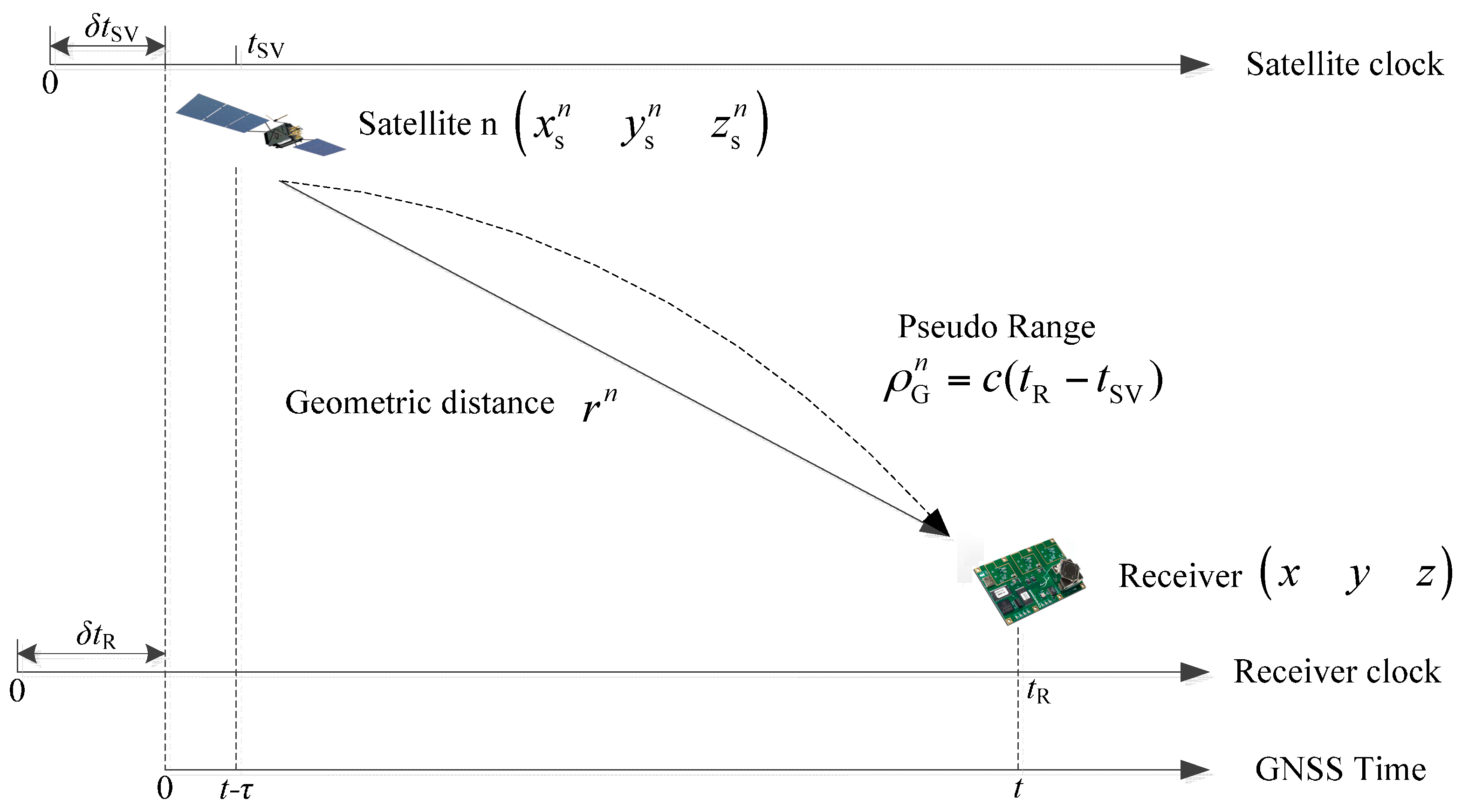
As shown in
Figure 4, assuming the position of the satellite n is
, the receiver‘s real position is
and the position of INS is
. So the pseudo-range
from the receiver to the satellite and the pseudo-range
from the INS to the satellite can be expressed as follows:
where
is the clock error,
is the geometric distance from the satellite to the receiver,
is the error of noise.
Equation (16) is executed in Taylor expansion, and the following expression is obtained:
Assuming
,
,
, Equation (17) can be expressed as:
where
is the unit vector of the LOS.
The pseudo-range
from the INS to the satellite is:
The pseudo-range rate
from the INS to the satellite can be described by:
The pseudo-range rate
from the receiver to the satellite can be described by:
From Equations (15) and (20)–(22), the pseudo-range error
and pseudo-range rate error
can be described by:
where
are the position error, and
are the velocity errors of INS in the space rectangular coordinate system. In the geodetic coordinate system, they can be expressed using the following equations:
where
represent latitude, longitude and altitude, respectively.
are the latitude error, longitude error and altitude error, respectively.
is the vector of the receiver velocity error in the navigation frame.
The code phase estimation error
and the Doppler estimation error
caused by INS velocity error and position error have the following relations with
and
:
where
is the code phase wavelength and
is the carrier wavelength,
and
are the clock error and clock shift which can be calibrated locally.
INS velocity and position error are mainly determined by the bias and shifts of gyros and accelerometers. The dynamic equations for a strapdown INS are given by:
where
is the transverse curvature radii and
is the meridian curvature radii.
is the Earth’s rotation rate in the navigation frame.
is the angular rate of the navigation frame with respect to the Earth frame.
is the error of the Earth rotation rate.
is the velocity vector in the navigation frame coordinates.
is the accelerometer’s output specific force vector in the body frame,
is the attitude error vector of the body frame with respect to the navigation frame.
is the transformation matrix from the computed body frame to the navigation frame.
is the accelerometer error vector in the body frame. Combined Equations (25)–(30),
and
can be estimated by the INS velocity error and position error which are relevant to the precision of gyros and accelerometers.
5. The INS-Aided Acquisition Experiments with Different Grade INS
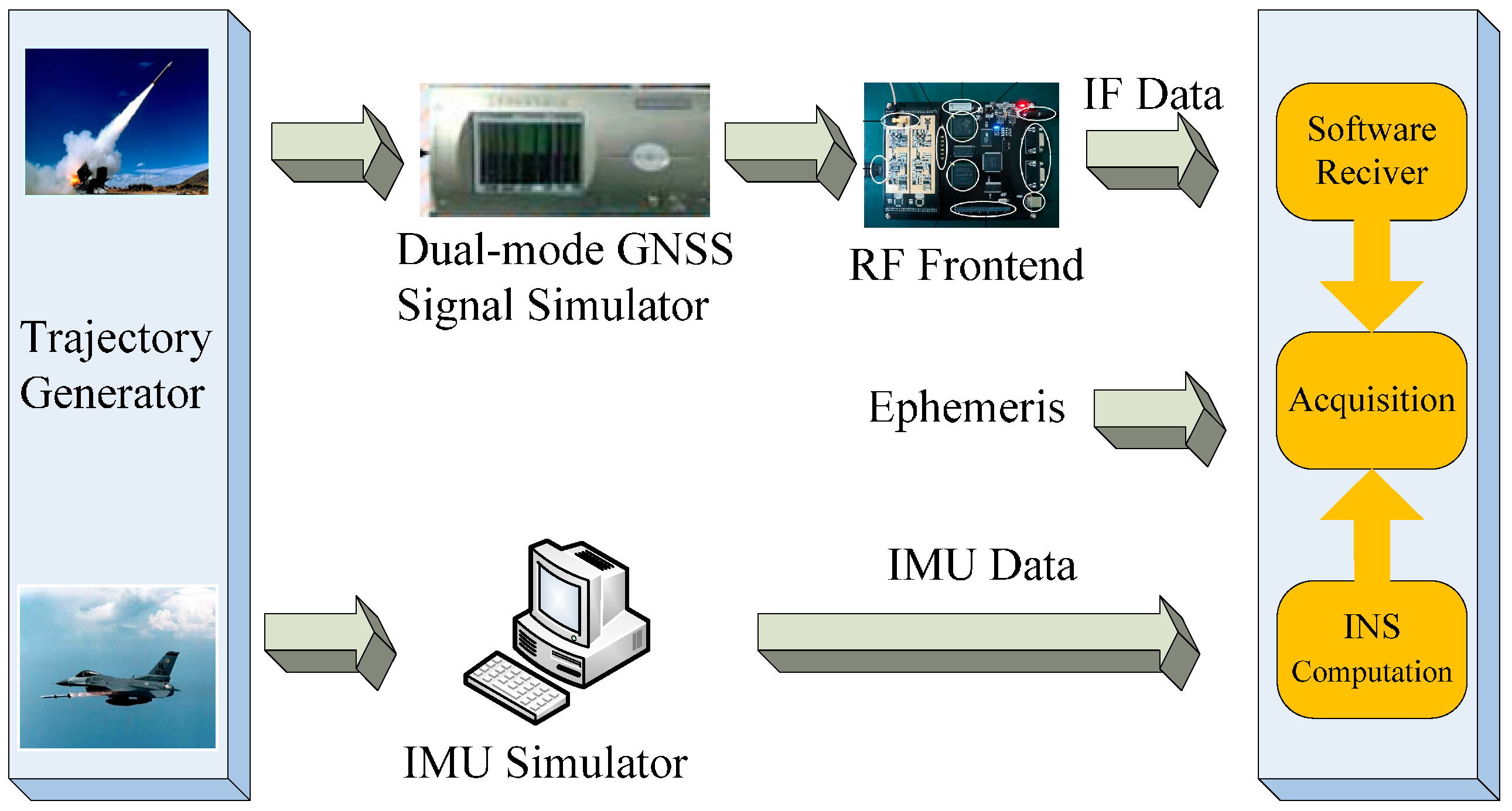
In order to analyze the performance of different grade INS in the INS-aided acquisition experiments, a software simulation platform was firstly designed. As shown in
Figure 5, the block diagram of the simulation platform includes: trajectory generator module, dual-mode GNSS signal simulation module, INS generating module and GNSS software receiver module [
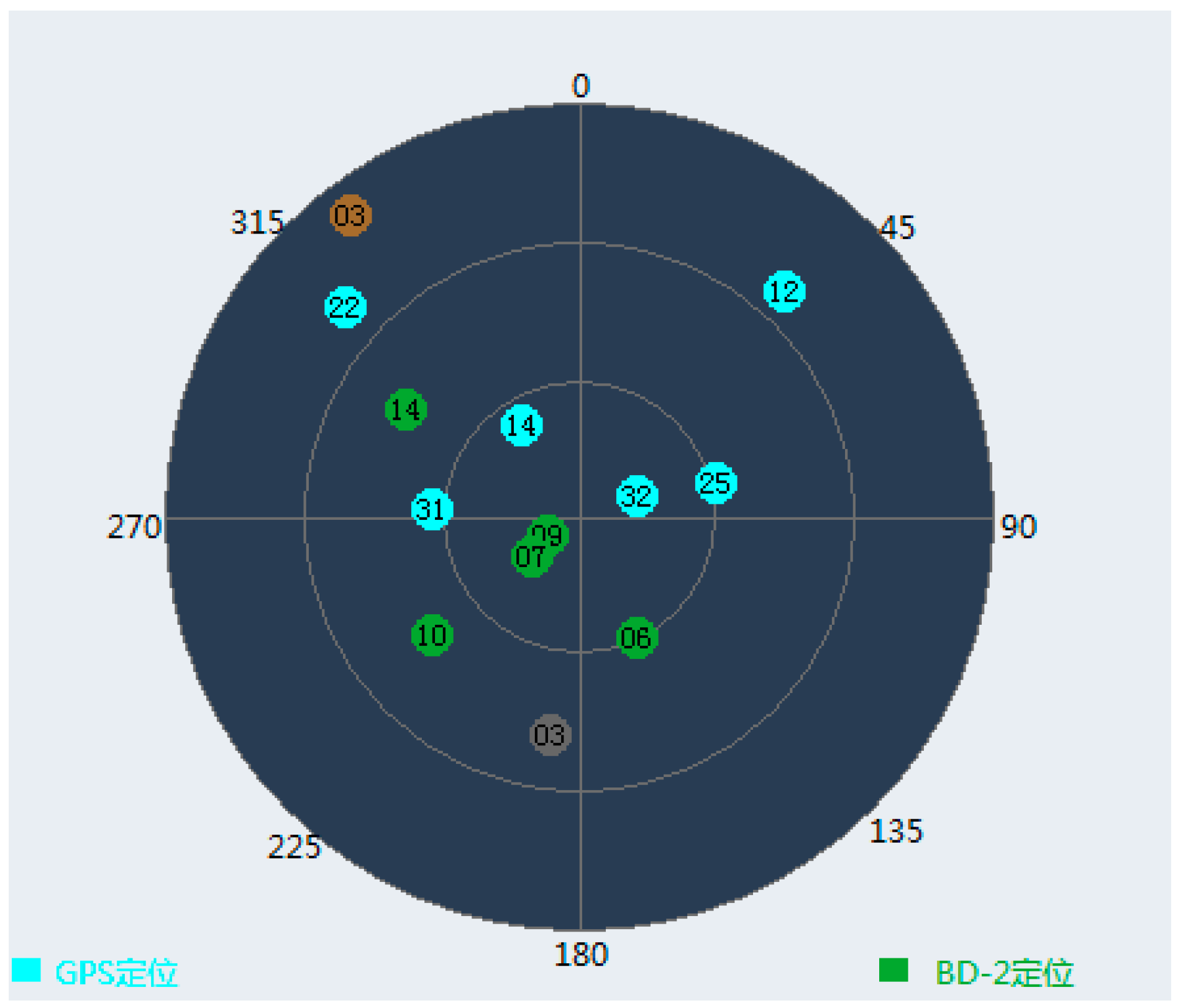
21]. Then, a trajectory with high dynamics, which is similar with missiles and aircrafts trajectory, is designed and simulated by the trajectory generator module. Under these conditions, the constellation of BDS and GPS are built. As shown in
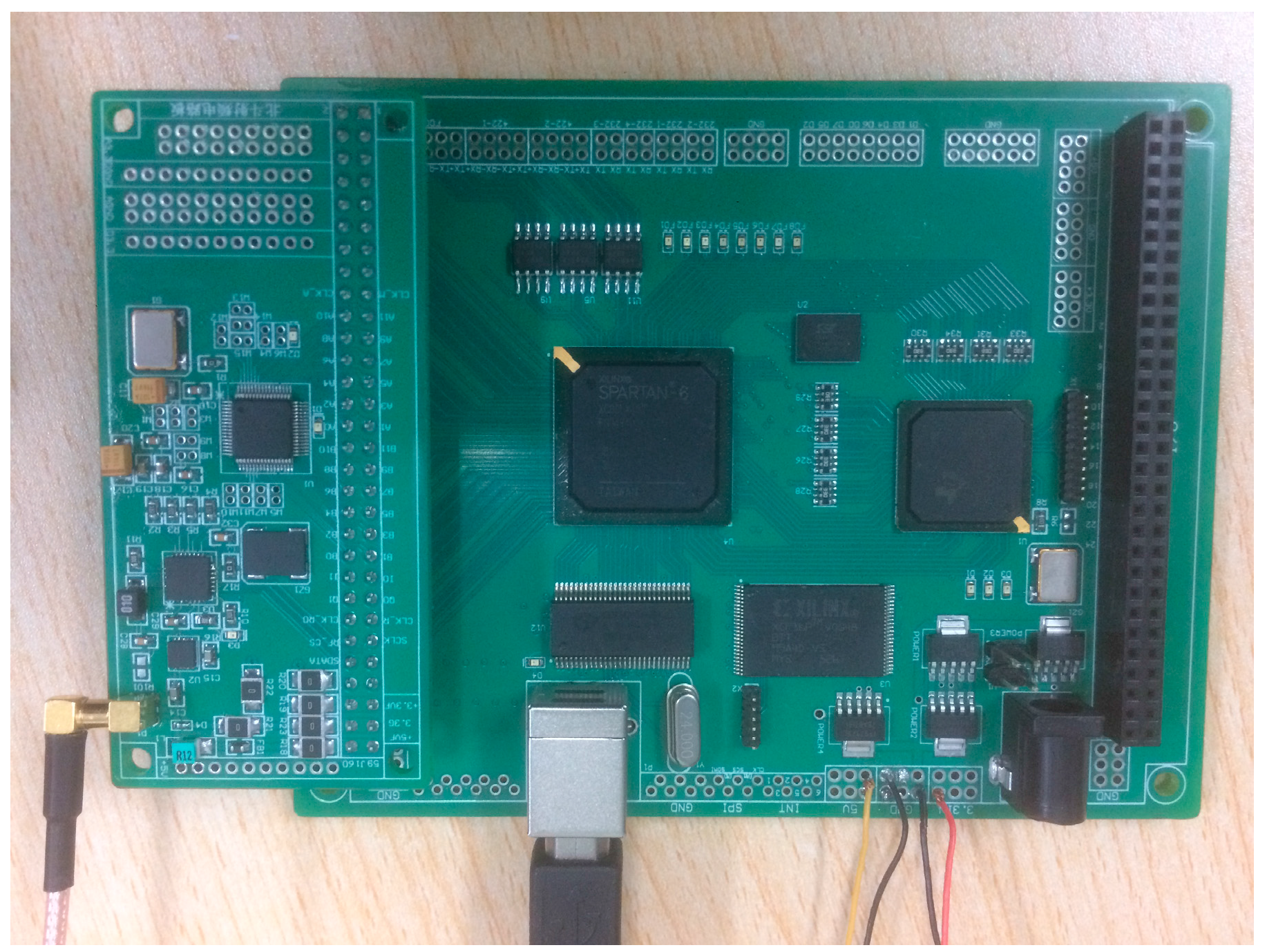
Figure 6, the constellation of BDS and GPS each has six satellites respectively in the simulation. Then, a dual-mode GNSS signal simulator is used to transmit the satellite radio frequency (RF) signal, which is nearly the same as the real signal. After that, the RF signal is received by an RF frontend which is designed based on MAX2769, as shown in
Figure 7. Later, the received RF signal is converted to the intermediate frequency (IF) digital in the process of software reception. The gyro and acceleration data of different grade INS are simulated using the designed trajectory. Finally, the IF data and IMU data are input into the GNSS software receiver module for INS-aided acquisition experiments.
5.1. Simulation Scenario Design
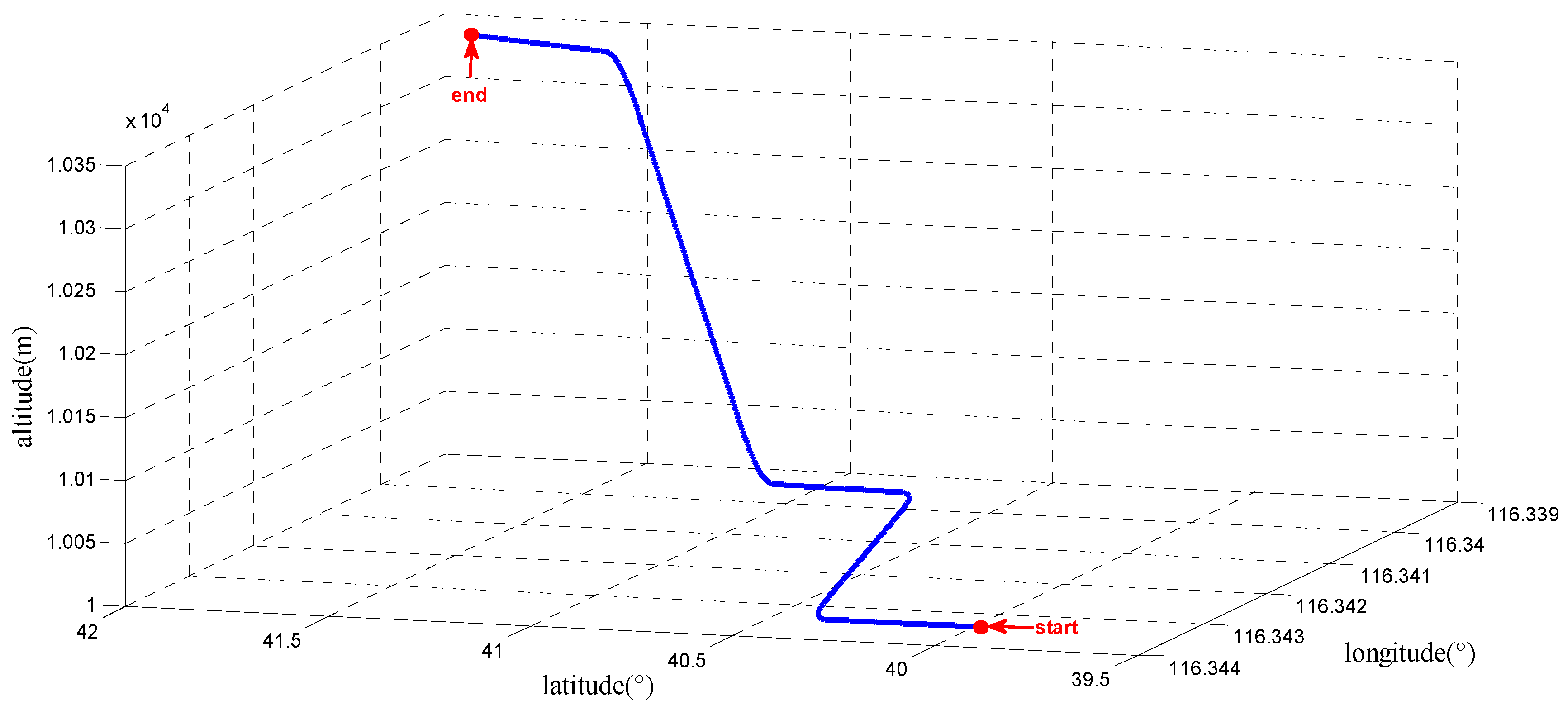
In order to confirm the performance of the INS-aided acquisition under highly dynamic conditions, a highly dynamic simulation scenario is designed. The trajectory includes acceleration, uniform motion, turning and climbing. The trajectory parameters, which include the acceleration and angular rate in the body frame, are listed in
Table 2. The initial latitude, longitude and altitude of the trajectory is [39.977886°, 116.343400°, 10,000 m], and the initial velocity is [0 m/s, 200 m/s, 0 m/s]. The highly dynamic trajectory according to the designed scenario is depicted in
Figure 8.
5.2. Parameters of Different Grade INS
The INS plays an important role in the progress of signal acquisition and tracking. Considering that the INS can offer the relative position and velocity of the receiver with respect to the satellite, which are the core parameters used to calculate the Doppler shift and the code phase, in the INS-aided acquisition experiments, we use the gyro and accelerometer data generator to calculate the INS information and the generator is developed based on the mathematical simulation model given in [
22].
In the gyro and accelerometer data generator, the true angular rate and acceleration are listed in
Table 2. Then, in order to simulate the outputs, the gyro and accelerometer errors which include constant biases, random drifts and noises are added into the true value. The gyro and accelerometer errors can lead to the reflecting constant bias, bias stability and random walk.
In Equation (29), different grades of INS bring different velocity and position errors. This would then affect the acquisition results due to the different Doppler shift and code phase ranges. Thus, for the purpose to analysis the performance changes caused by different INS grades, a variety of INS are simulated in the designed scenario. The parameters of the selected INS in the experiments are listed in
Table 3. In the above analysis, the precision of INS varies by 10 times, which covers the typical precision used in the current application.
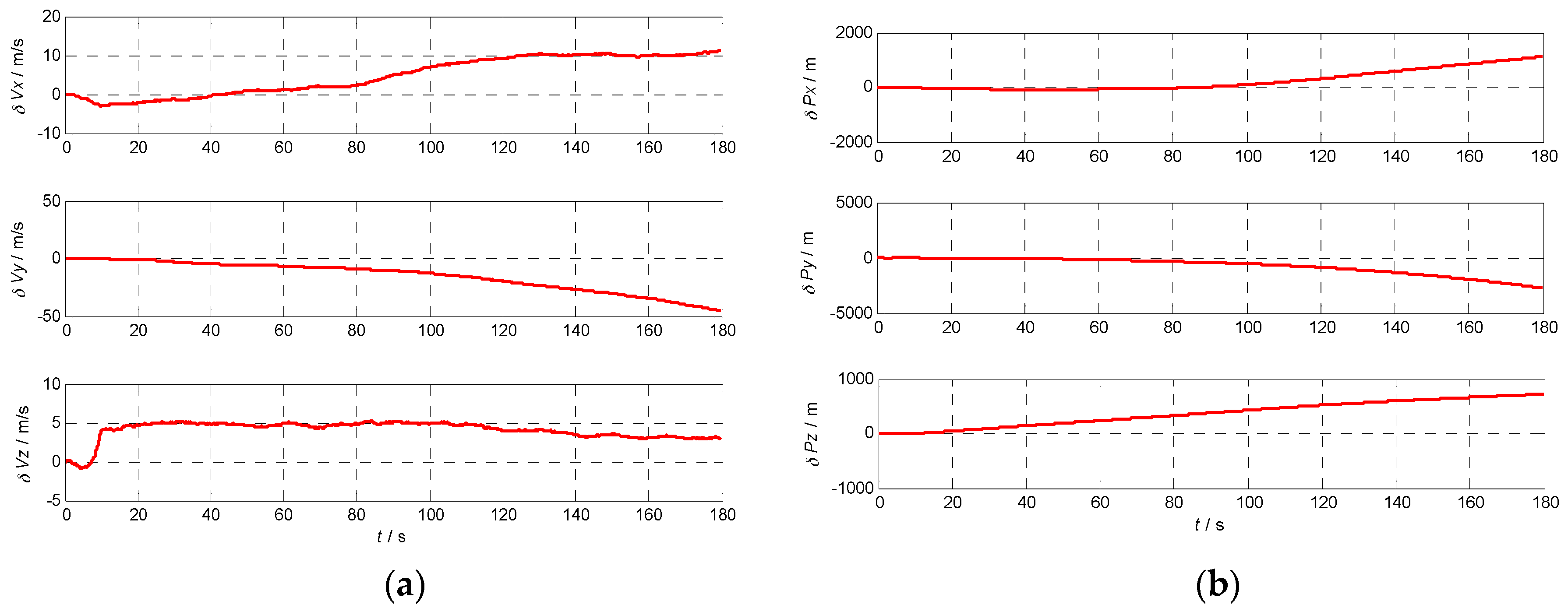
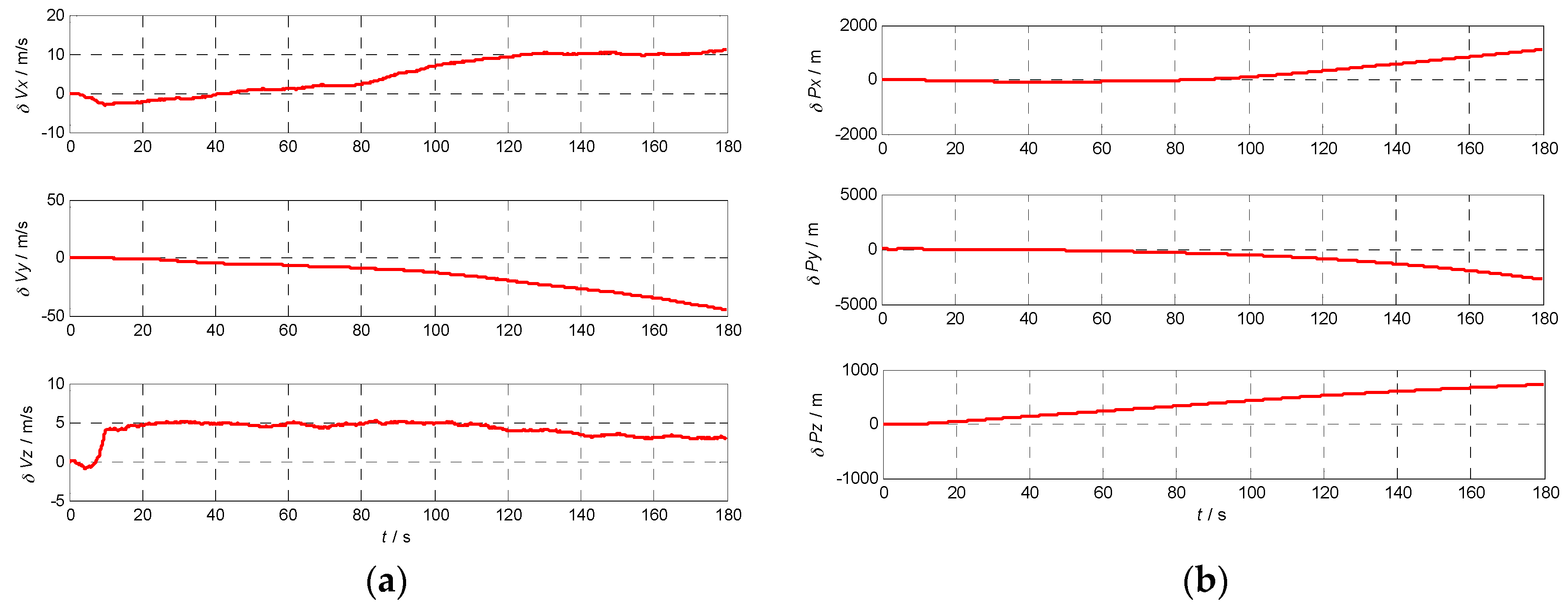
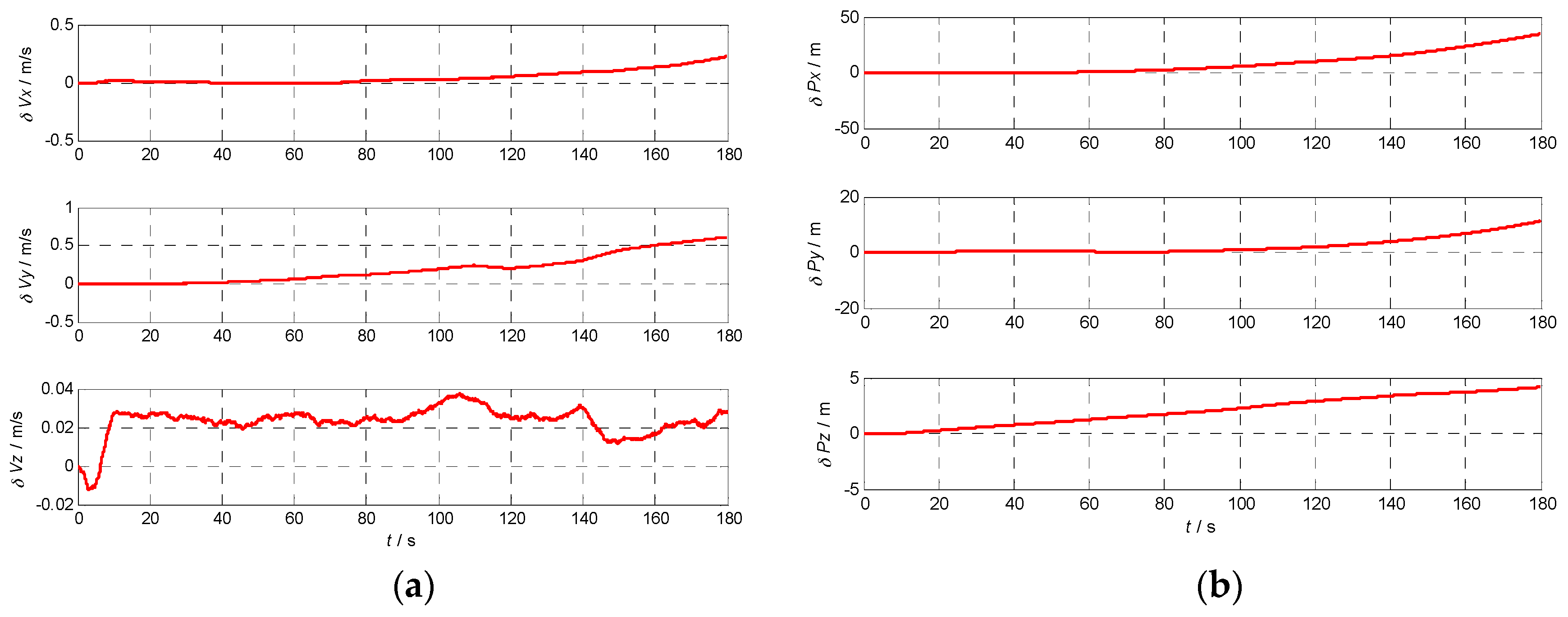
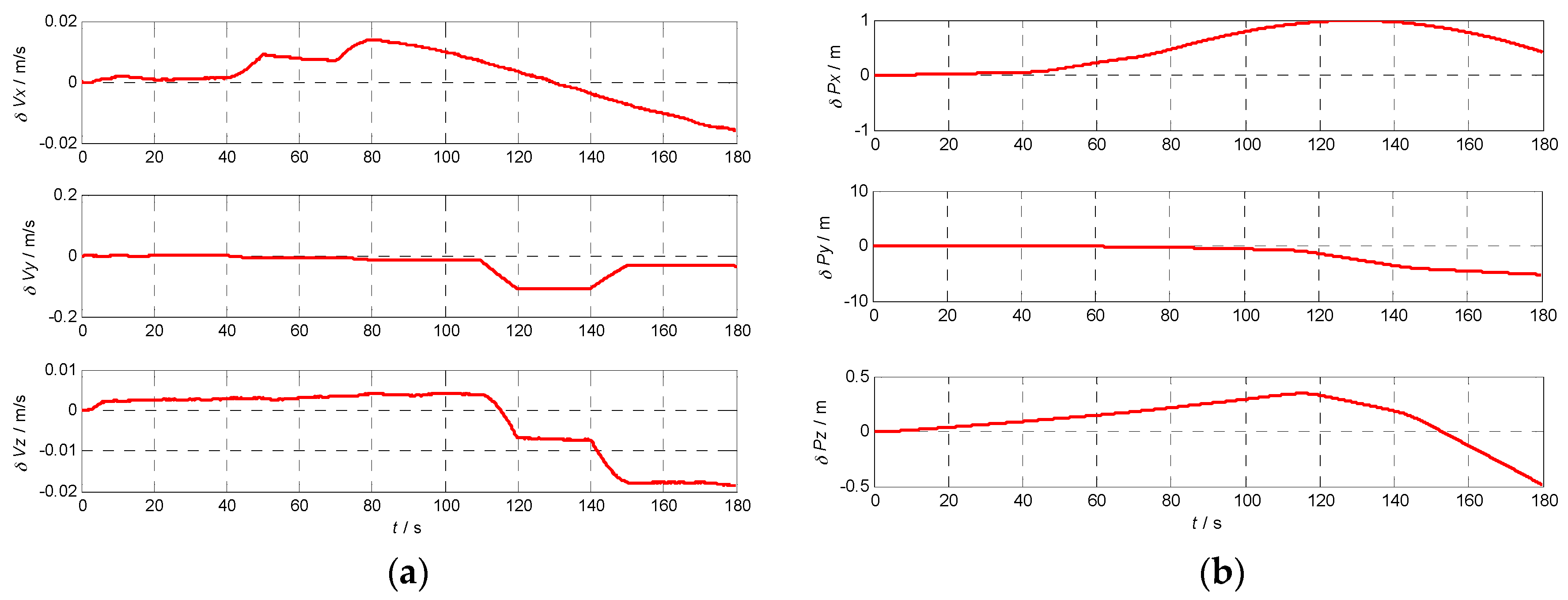
5.3. Velocity and Position Error Using Different INS
In order to analyze the effects of the INS errors on the performance of Doppler shift and code phase estimations conveniently, the initial position and velocity are assumed known without errors. To calculate the Doppler shift error and code phase error, the relative position and velocity errors between the receiver and the satellite caused by the gyro and accelerometer errors are illustrated in
Figure 9,
Figure 10,
Figure 11 and
Figure 12 with the four different grades of INS, and the maximum errors in 180 s are further listed in
Table 4. From the above results, we can draw the conclusion that the velocity and position errors increase as the INS decrease in quality.
5.4. Doppler Shift and Code Phase Estimation Errors Using Different Grade INS
According to Equations (27) and (28), Doppler shift and code phase estimation errors exist due to the velocity error and positon error caused by the INS used. According to the ephemeris and the INS information of the 12 visible satellites, the Doppler shift and the code phase estimation of each satellite can be calculated by Equations (7) and (14). Then, the Doppler shift and code phase estimation errors of the 12 visible satellites are achieved by calculating the difference between the estimation and real value. The maximum Doppler shift estimation errors and the maximum code phase estimation errors are listed in
Table 5 and
Table 6, respectively.
The experimental results show that the Doppler shift and code phase estimation errors increase as the quality of the INS decreases. The Doppler shift estimation errors are less than the minimal frequency search space (±500 Hz) in 180 s. The code phase estimation errors are less than 1023 chips (for GPS) or 2046 chips (for BDS). Furthermore, by comparing
Table 3 with
Table 5, it can be seen that the Doppler shift estimation error is about 200 Hz when using a MEMS grade INS, and that if the INS accuracy increases by 10-fold, the estimation error of the Doppler frequency shift decreases by 10-fold. Similarly, the code phase estimation error decreases approximately 10-fold if the INS accuracy improves by 10-fold. Thus, the appropriate INS for the intended acquisition can be selected according to the required accuracy of the Doppler frequency shift and code phase.
5.5. INS-Aided Acquisition Experiments and Results
Due to the fact that the clock error of the software receiver has been compensated before the INS-aided acquisition experiments and the satellite ephemeris is true, the residual frequency shift is the Doppler shift caused by the INS position and velocity errors. In this case, the performance of the INS-aided acquisition can be fully verified. In
Table 7, the search parameters with different grades of INS-aided and no INS-aid acquisition is illustrated. Due to the decrease of frequency and code phase range, the acquisition time of the INS-aided case is shorter than no INS-aid case. Besides, if the frequency search space is smaller, the accuracy of the Doppler shift estimation is higher.
The selected MEMS-grade INS has the same search parameters as the selected higher grade INS. In other words, the selected MEMS-grade INS can satisfy the demands of fast acquisition under highly dynamic conditions. Considering the price, the weight and the size, the selected MEMS-grade INS is the best choice for the deeply coupled integration.
After the signal interruption, the navigation information provided by INS can not only be used to save acquisition time, but also it can keep tracking in a short time. If the LOS error estimated by the local clock and INS position is less than half a chip, instantaneous acquisition can be achieved in the code phase direction. Similarly, the instantaneous acquisition of carrier frequency can be realized if the frequency error estimated by SINS is less than the equivalent bandwidth of the tracking loop. This offers great advantages in applications when the signal is frequently interrupted but the duration of the interruption is short, such as urban vehicle navigation.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}