
DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Signal Model
3. Methodology
3.1. Forward–Backward Linear Prediction
3.2. Proposed Method: FBLP-SVR
4. Simulation Results
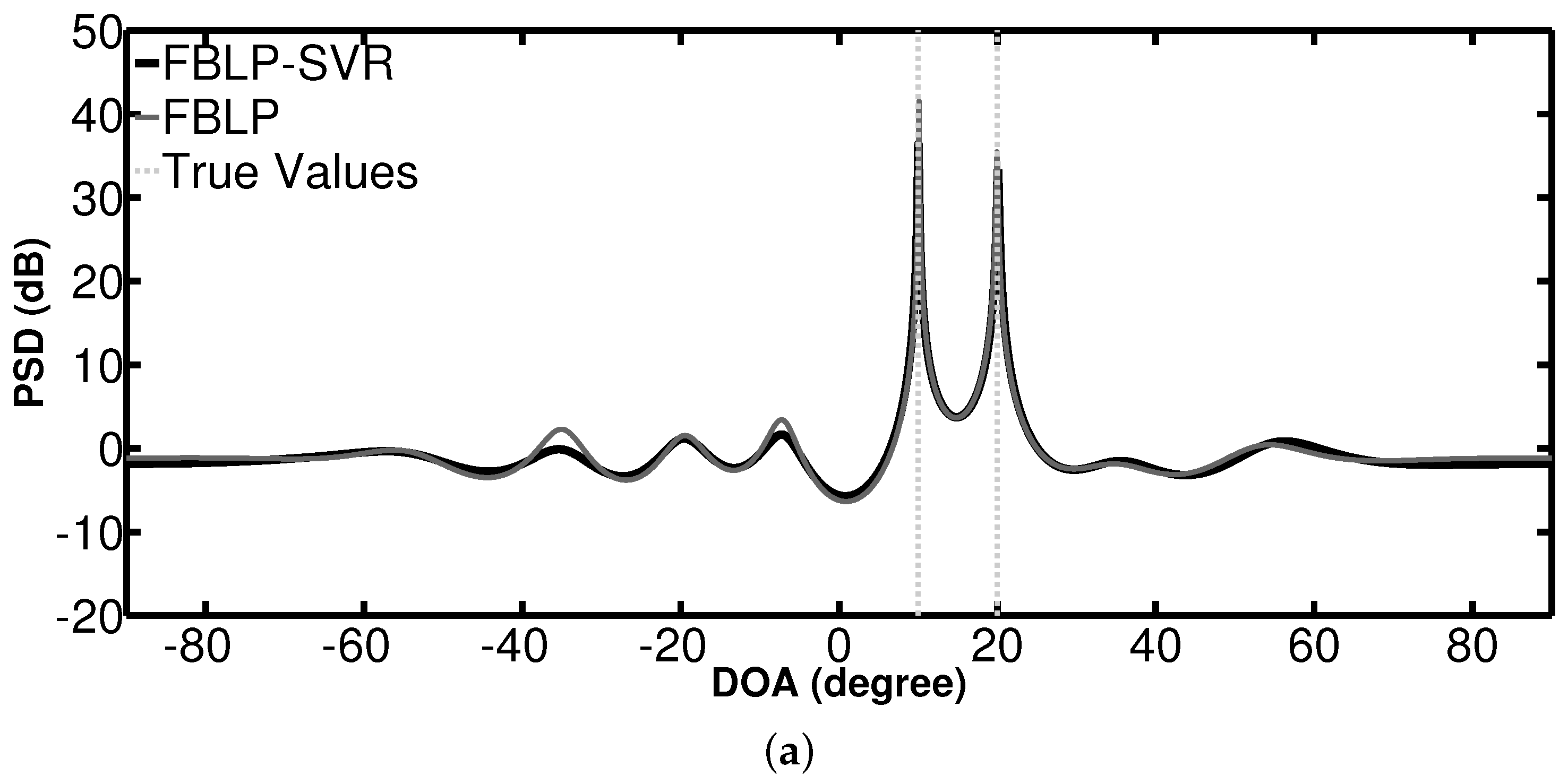
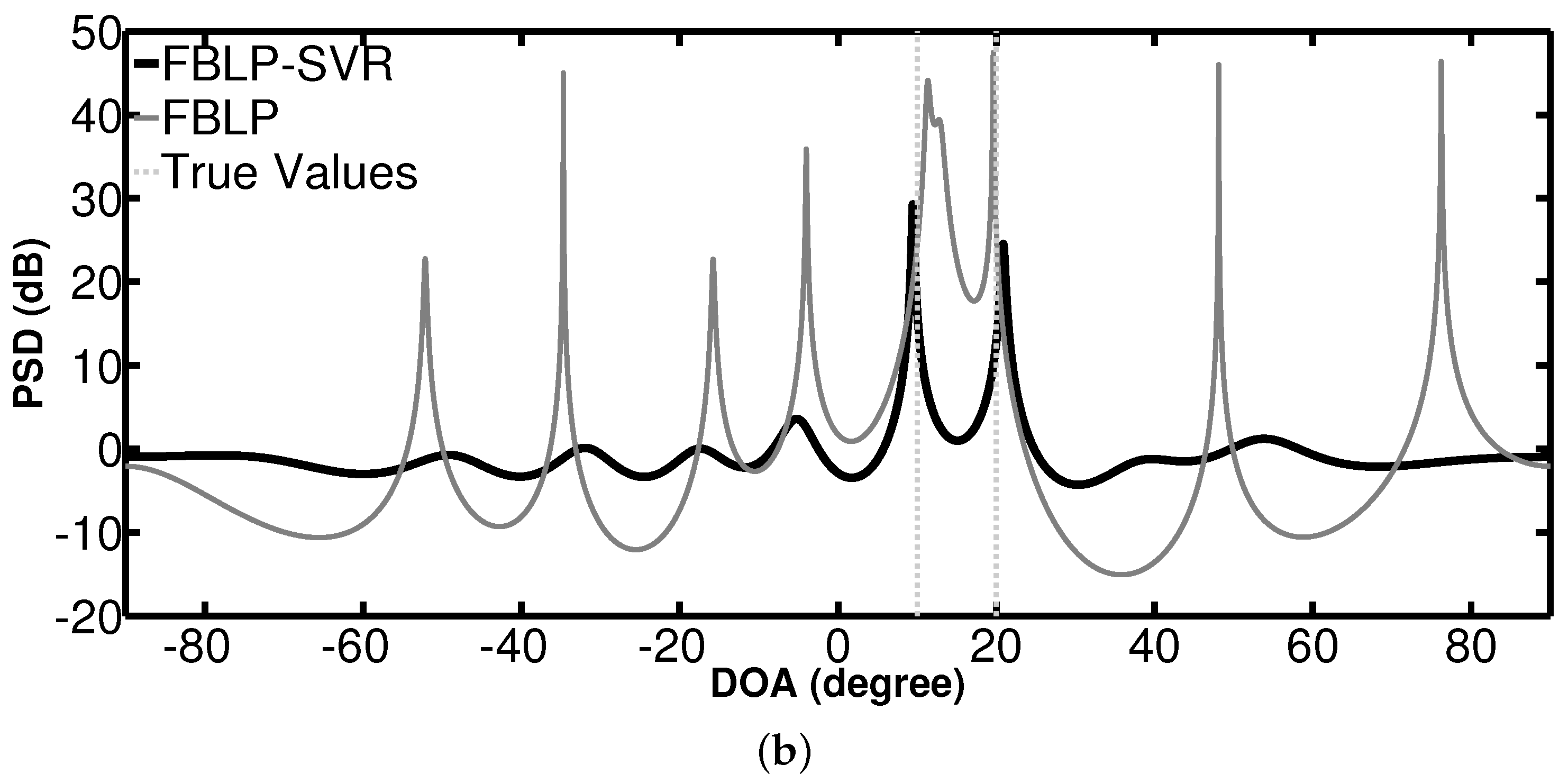
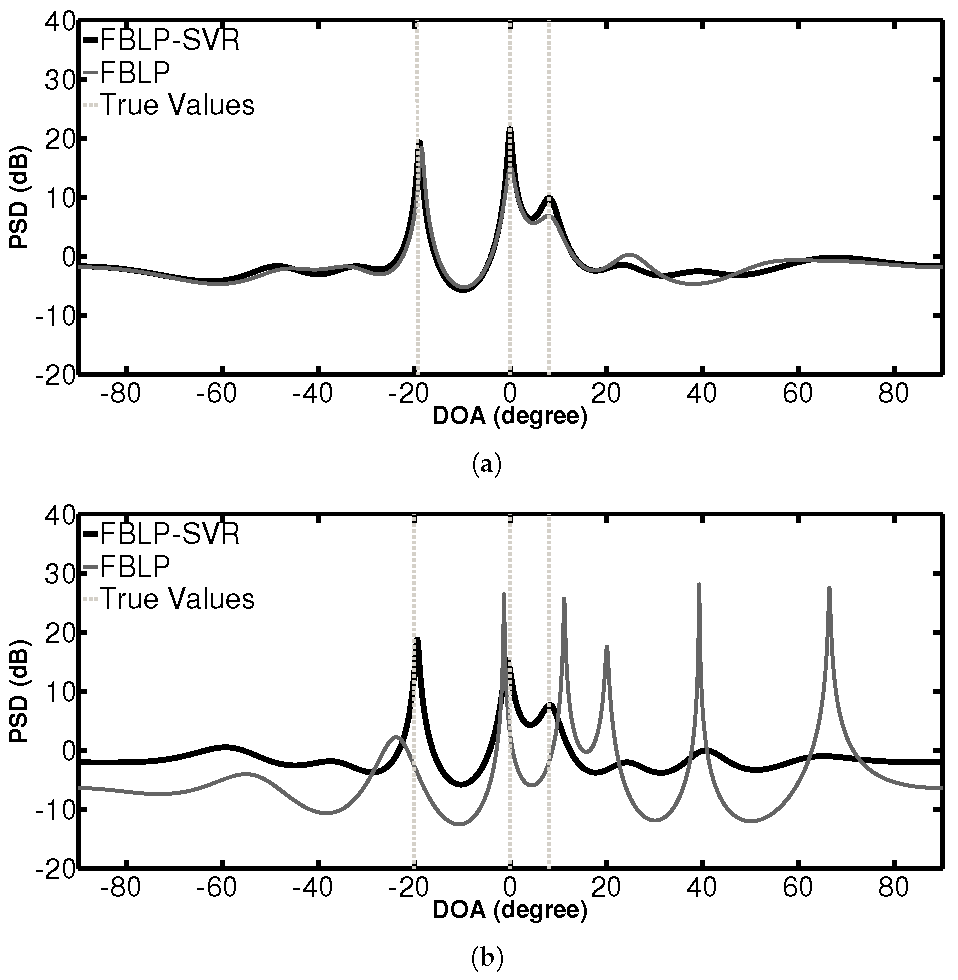
4.1. Performance with Power Spectrum Density
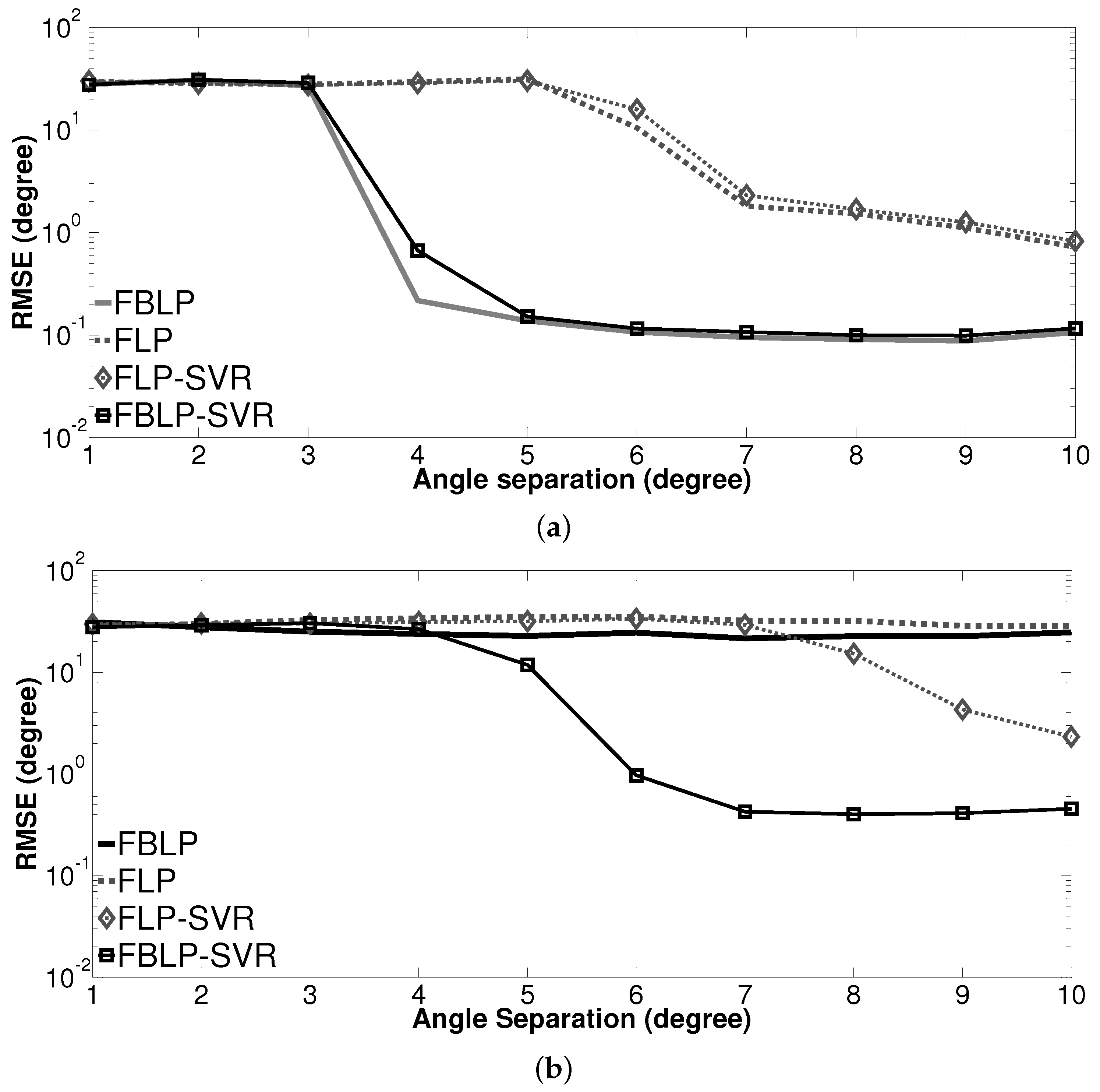
4.2. Performance versus Angle Separation
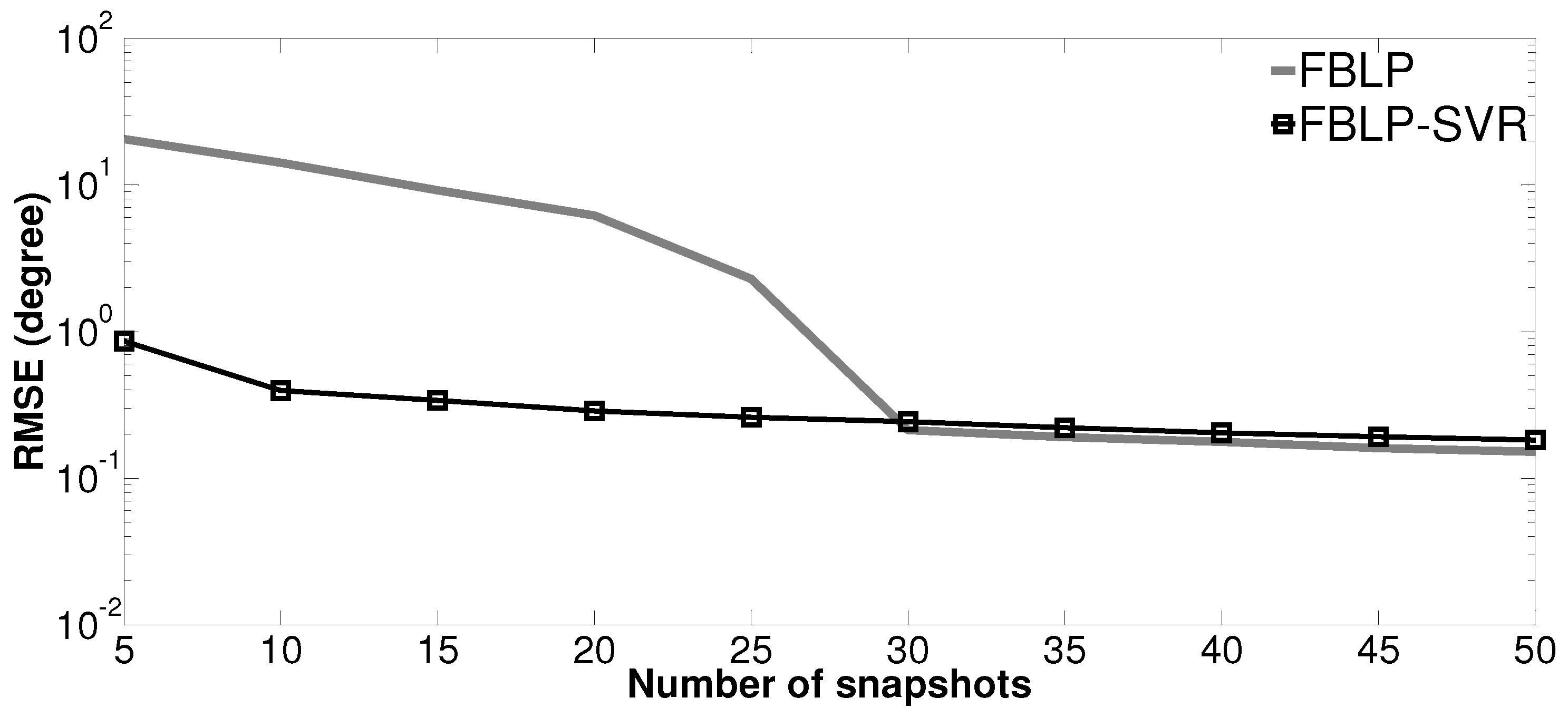
4.3. Performance versus Number of Snapshots
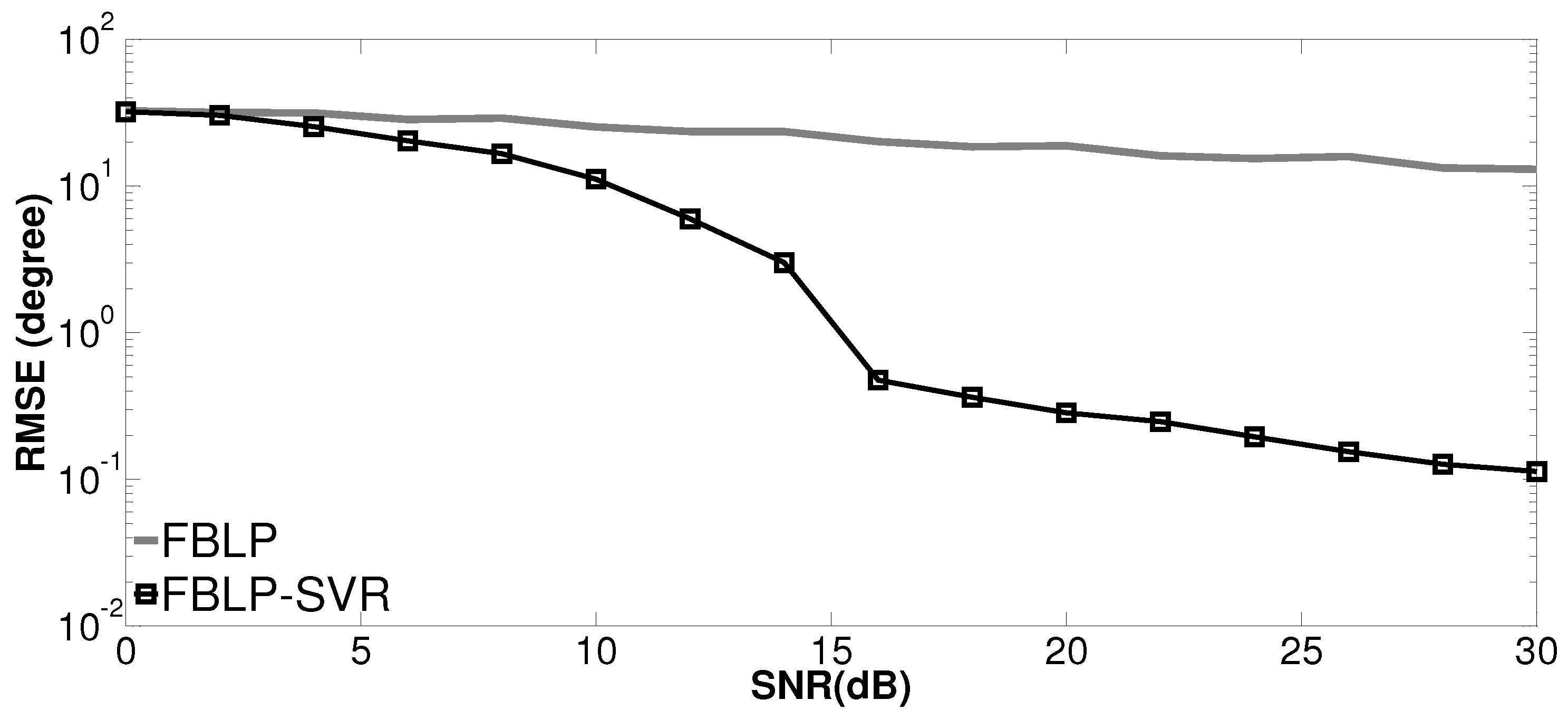
4.4. Performance versus SNR
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DOA | Direction-of-Arrival |
| FBLP | Forward-Backward Linear Prediction |
| SVR | Support Vector Regression |
| SNR | Signal-to-noise |
| SS | Spatial smoothing |
| FB | Forward–backward |
| LP | Linear prediction |
| AR | Auto-regressive |
| ARMA | Auto-regressive moving average |
| FLP | Forward linear prediction |
| BLP | Backward linear prediction |
| MUSIC | Multiple Signal Classification |
| ESPRIT | Estimation of Signal Parameters via Rational Invariance Technique |
| ULA | Uniform Linear Array |
| AGWN | Additive Gaussian white noise |
| PSD | Power Spectrum Density |
| QP | Quadratic programming |
| RMSE | Root Mean Square Error |
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Tuncer, T.E.; Friedlander, B. Narrowband and wideband DOA estimation for uniform and nonuniform linear arrays. In Classical and Modern Direction-of-Arrival Estimation; Academic Press: Burlington, MA, USA, 2009; pp. 138–173. [Google Scholar]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Marengo, E.A.; Gruber, F.K.; Simonetti, F. Time-reversal MUSIC imaging of extended targets. IEEE Trans. Image Process. 2007, 16, 1967–1984. [Google Scholar] [CrossRef] [PubMed]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Salvo Rossi, P. Noncolocated time-Reversal MUSIC: High-SNR distribution of null spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef]
- Wang, Y.; Trinkle, M.; Ng, B.W.H. DOA estimation under unknown mutual coupling and multipath with improved effective array aperture. Sensors 2015, 15, 30856–30869. [Google Scholar] [CrossRef] [PubMed]
- Shan, T.J.; Wax, M.; Kailath, T. On spatial smoothing for direction-of-arrival estimation of coherent signals. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 806–811. [Google Scholar] [CrossRef]
- Pillai, S.U.; Kwon, B.H. Forward/backward spatial smoothing techniques for coherent signal identification. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 8–15. [Google Scholar] [CrossRef]
- Linebarger, D.A.; DeGroat, R.D.; Dowling, E.M. Efficient direction-finding methods employing forward/backward averaging. IEEE Trans. Signal Process. 1994, 42, 2136–2145. [Google Scholar] [CrossRef]
- Du, W.; Kirlin, R.L. Improved spatial smoothing techniques for DOA estimation of coherent signals. IEEE Trans. Signal Process. 1991, 39, 1208–1210. [Google Scholar] [CrossRef]
- Qi, C.; Wang, Y.; Zhang, Y.; Han, Y. Spatial difference smoothing for DOA estimation of coherent signals. IEEE Signal Process. Lett. 2005, 12, 800–802. [Google Scholar]
- Wei, J.; Xu, X.; Luo, D.; Ye, Z. Sequential DOA estimation method for multi-group coherent signals. Signal Process. 2017, 130, 169–174. [Google Scholar] [CrossRef]
- Wang, Y.L.; Chen, H.; Peng, Y.; Wan, Q. Linear prediction. In Spatial Spectrum Estimation Theory and Algorithm; Tsinghua University: Beijing, China, 2004; pp. 83–109. [Google Scholar]
- Xin, J.; Sane, A. Linear prediction approach to direction estimation of cyclostationary signals in multipath environment. IEEE Trans. Signal Process. 2001, 49, 710–720. [Google Scholar]
- Vapnik, V.N. Statistical Learning Theory; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Martínez-Ramón, M.; Christodoulou, C. Support vector machines for antenna array processing and electromagnetics. In Synthesis Lectures on Computational Electromagnetics; Morgan and Claypool: San Rafael, CA, USA, 2005; Volume 1, pp. 1–120. [Google Scholar]
- Gaudes, C.C.; Santamaria, I.; Via, J.; Gómez, E.M.; Paules, T.S. Robust array beamforming with sidelobe control using support vector machines. IEEE Trans. Signal Process. 2007, 55, 574–584. [Google Scholar] [CrossRef]
- El Gonnouni, A.; Martinez-Ramon, M.; Rojo-Álvarez, J.L.; Camps-Valls, G.; Figueiras-Vidal, A.R.; Christodoulou, C.G. A support vector machine MUSIC algorithm. IEEE Trans. Antennas Propag. 2012, 60, 4901–4910. [Google Scholar] [CrossRef]
- Pastorino, M.; Randazzo, A. A smart antenna system for direction of arrival estimation based on a support vector regression. IEEE Trans. Antennas Propag. 2005, 53, 2161–2168. [Google Scholar] [CrossRef]
- Le Bastard, C.; Wang, Y.; Baltazart, V.; Derobert, X. Time delay and permittivity estimation by ground-penetrating radar with support vector regression. IEEE Geosci. Remote Sens. Lett. 2014, 11, 873–877. [Google Scholar] [CrossRef]
- Rojo-Álvarez, J.L.; Martínez-Ramón, M.; de Prado-Cumplido, M.; Artés-Rodríguez, A.; Figueiras-Vidal, A.R. Support vector method for robust ARMA system identification. IEEE Trans. Signal Process. 2004, 52, 155–164. [Google Scholar] [CrossRef]
- Haykin, S.S. Linear prediction. In Adaptive Filter Theory; Pearson Education: New Delhi, India, 2008; pp. 136–148. [Google Scholar]
- Chen, Y.H.; Chiang, C.T. Kalman-based spatial domain forward-backward linear predictor for DOA estimation. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 474–479. [Google Scholar] [CrossRef]
- Tufts, D.W.; Kumaresan, R. Estimation of frequencies of multiple sinusoids: Making linear prediction perform like maximum likelihood. Proc. IEEE 1982, 70, 975–989. [Google Scholar] [CrossRef]






© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Wang, Y.; Le Bastard, C.; Wang, T. DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction. Sensors 2017, 17, 1225. https://doi.org/10.3390/s17061225
Pan J, Wang Y, Le Bastard C, Wang T. DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction. Sensors. 2017; 17(6):1225. https://doi.org/10.3390/s17061225
Chicago/Turabian StylePan, Jingjing, Yide Wang, Cédric Le Bastard, and Tianzhen Wang. 2017. "DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction" Sensors 17, no. 6: 1225. https://doi.org/10.3390/s17061225
APA StylePan, J., Wang, Y., Le Bastard, C., & Wang, T. (2017). DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction. Sensors, 17(6), 1225. https://doi.org/10.3390/s17061225