2.1. Fluid Dynamic LEM
A model directly based on fluid mechanics equations was presented originally by Sharma [
31] and extended by de Luca et al. [
32] later on. The model is able to predict cavity pressure fluctuations, flow velocity at the orifice exit section, average displacement and velocity of diaphragm, as well as phase-lag relationships between the different variables. As anticipated in the previous paragraph, the three basic elements of the actuator are modeled: the oscillating diaphragm, the cavity and the orifice.
The dynamics of the diaphragm is described through the equation of motion of a one-degree-of-freedom forced-damped spring-mass system:
where
is the diaphragm (average) displacement at a generic time instant
t,
is the actual damping ratio of the diaphragm,
its natural frequency,
is the average linear diaphragm displacement due to the application of a certain voltage to the piezo-element,
is the operating frequency, and the dot superscript stands for time derivative. Furthermore,
represents the cavity (internal) differential pressure,
is the diaphragm surface area and
is the diaphragm total mass, including shim, piezo-element and air added mass. The structural frequency of the composite diaphragm is defined as:
which represents the uncoupled (first mode) natural frequency of the structural oscillator, where
is the diaphragm equivalent spring stiffness. This latter is evaluated as:
where
is the frequency of the principal vibration mode of a rigidly clamped disk, assumed equal to the first fundamental mode of the shim only (Rathnasingham and Breuer [
34] and Kinsler et al. [
35]), that is the structural element actually clamped, while
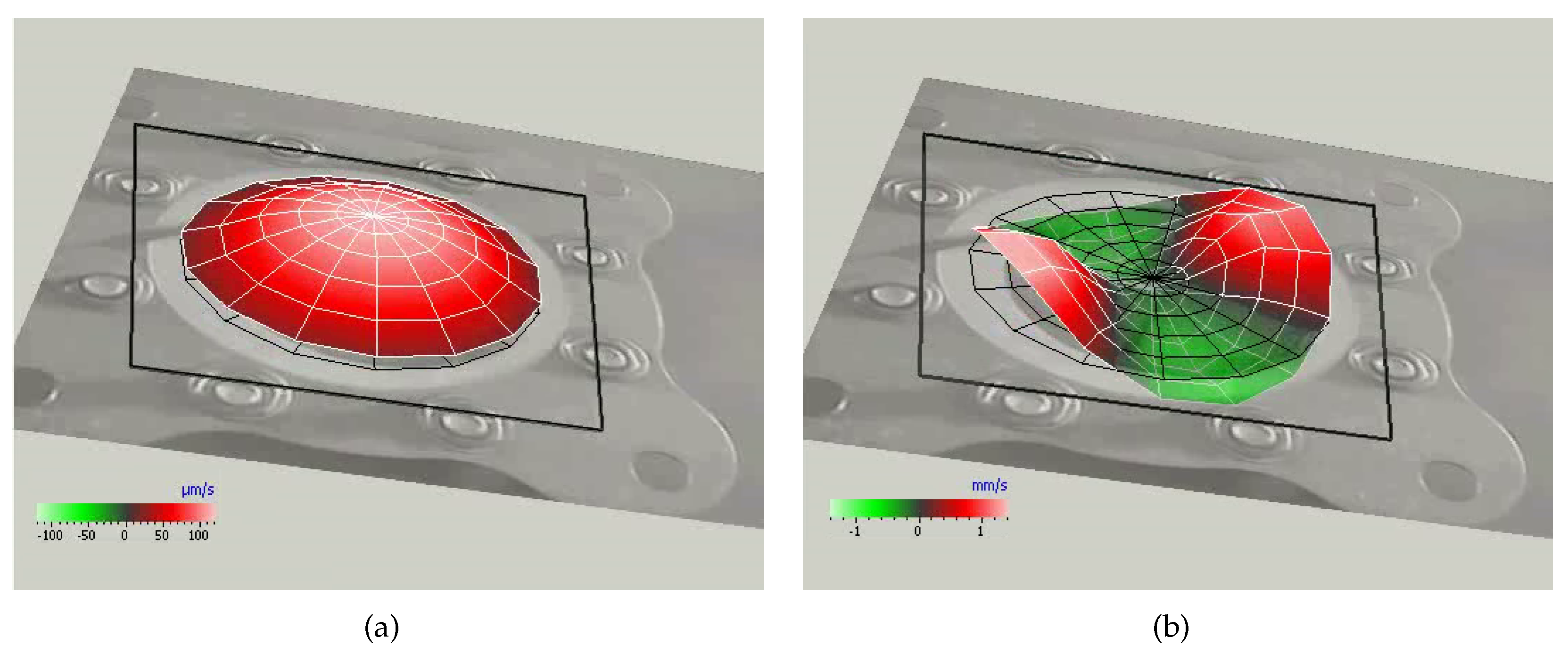
is the diaphragm mass including both shim and piezo-ceramic disk. Higher modes also can be excited at relatively high frequencies, as depicted in
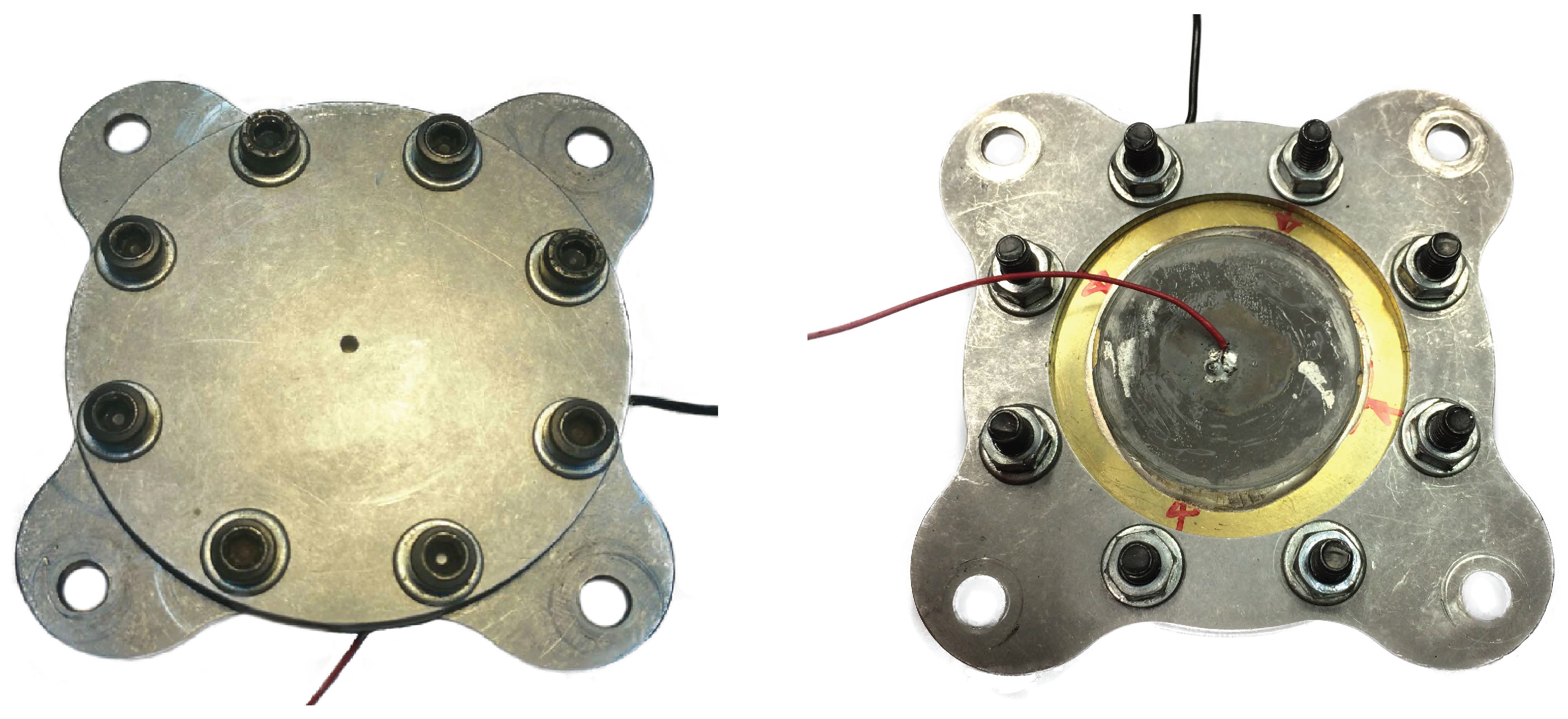
Figure 3, where the diaphragm deflection detected by a Polytec laser scanning vibrometer PSV400-H4 is reported for operation frequencies
f of 1555 Hz and 5370 Hz, respectively, and very low voltage,
V. The device has an aluminum shim with a diameter of 42 mm, while the chamber is 3 mm in height. Note that the presence of higher-order structural modes is not desirable because the distorted shim shape vibrating at natural frequencies higher than its fundamental one produces little net displacement of the surrounding air.
The electro-dynamic force (applied to the diaphragm by the piezoelectric element) is modeled as
, with
being the force magnitude:
where the average linear displacement
is expressed as the cavity volume variation
divided by the wall area, and
represents the applied voltage. It is important to note that, despite what is shown by Equation (
4), the dependence of the dynamic deflection of the piezo-element on the driving voltage is not linear, but the slope of the curve deflection-voltage decreases with increasing voltage, and it is a function of the operating frequency, as investigated by Krishnan and Mohseni [
36]. This behavior of the piezo-materials influences the performances of the actuators, as will be shown in
Section 4.2. The effective acoustic piezoelectric coefficient
is defined as the ratio of the volume variation to the applied voltage, when the driving differential pressure across the piezo-element is null, Prasad [
22],
The determination of
could not be trivial since it requires the knowledge of the transverse displacement distribution of the composite diaphragm, as outlined by Prasad [
22] and Prasad et al. [
24]; de Luca et al. [
32] observed that a more convenient procedure consists in determining the acoustic compliance of the diaphragm
as:
and to relate it to
through the electroacoustic transduction coefficient
:
The acoustic compliance is then determined from piezo-ceramic properties:
with
,
,
, and
being the thickness, the diameter, Young’s modulus, and Poisson’s ratio of the piezo-ceramic respectively. From their physical definitions, the relationship between the stiffness and the compliance is easily obtained:
Because of the difficulties in determining the electro-mechanical properties of the composite diaphragm, in practical applications the modeling described above considers the electroacoustic transduction coefficient as a fitting parameter to be determined by comparisons between numerical and experimental data.
The second equation of the model is represented by the conservation of mass inside the cavity under the assumption of zero-dimensional system. By relating the density and pressure variations by means of an isentropic compression/expansion transformation, the continuity equation can be formulated as:
where
is the cavity volume (with
H being the cavity height),
is the orifice area,
is the specific heat ratio of air,
is the external ambient pressure and
U is the instantaneous flow velocity through the orifice, namely the jet velocity.
Finally, the model is completed with the unsteady Bernoulli’s equation, applied between a point inside the cavity, where the flow velocity is practically null and a point just outside the cavity, which represents the location where the pressure matches the unperturbed external ambient value:
in Equation (
11),
K is the head loss coefficient, including the inviscid contribution (equal to unity) due to the kinetic energy recovery at ambient pressure, minor (entrance/exit) losses, and distributed losses due to friction inside the orifice duct. The distance between the two points of application of the Bernoulli’s equation is referred to as the modified (effective) length of the orifice,
. More details and typical values for
K can be found in Sharma [
31] and de Luca et al. [
32]. The Helmholtz frequency is defined as:
with
and
being the equivalent stiffness of the air inside the cavity and the effective mass of the air at the orifice.
By taking the time derivative of Equation (
1), and eliminating the pressure derivative by means of Equation (
10), de Luca et al. (2016) [
33], obtained:
which has to be coupled with Equation (
11).
denotes the diaphragm velocity. Following Sharma [
31], the frequency
represents the natural frequency of the pneumatic spring made of the air enclosed within the cavity volume,
, and the oscillating diaphragm of mass
:
To sum up, the actuator behavior is modeled by the dynamics of two mutually coupled oscillators: the first one, describing the diaphragm motion, Equation (
13), is characterized by the uncoupled natural frequency
, while the second one, the acoustic oscillator, Equation (
11), describing the dynamics of the mass of air at the orifice,
, through its velocity
U, is characterized by its natural frequency
. An external forcing due to the supply power also acts on the diaphragm dynamics.
Making the further assumption of absence of damping effects (the practical validity of such an assumption has been discussed deeply in previous papers), for temporal behavior of the free oscillations
, a closed-form analytical evaluation of the natural coupled (or modified) frequencies is obtained:
The natural coupled frequencies in the totally undamped case are often also expressed conveniently in Hz, namely:
Despite the seemingly strong simplification, predictions based on the previous relationship are in several circumstances in very good agreement with data obtained by experimental measurements, de Luca et al. [
32]. In some applications, a desirable operating condition is represented by a relatively high plateau of fluid ejection velocity over a rather wide range of frequencies. This condition can be attained by designing the devices so as to have the two frequencies
and
close to each other. In fact, upon inspection of Equation (
15), one argues that when
, the distance between the frequencies is a function of the cavity height:
On the other hand, if
, then:
The above findings were obtained experimentally by Gomes et al. [
37], who carried out extensive measurements to characterize piezo-driven devices of the same kind of those studied theoretically in this paper.
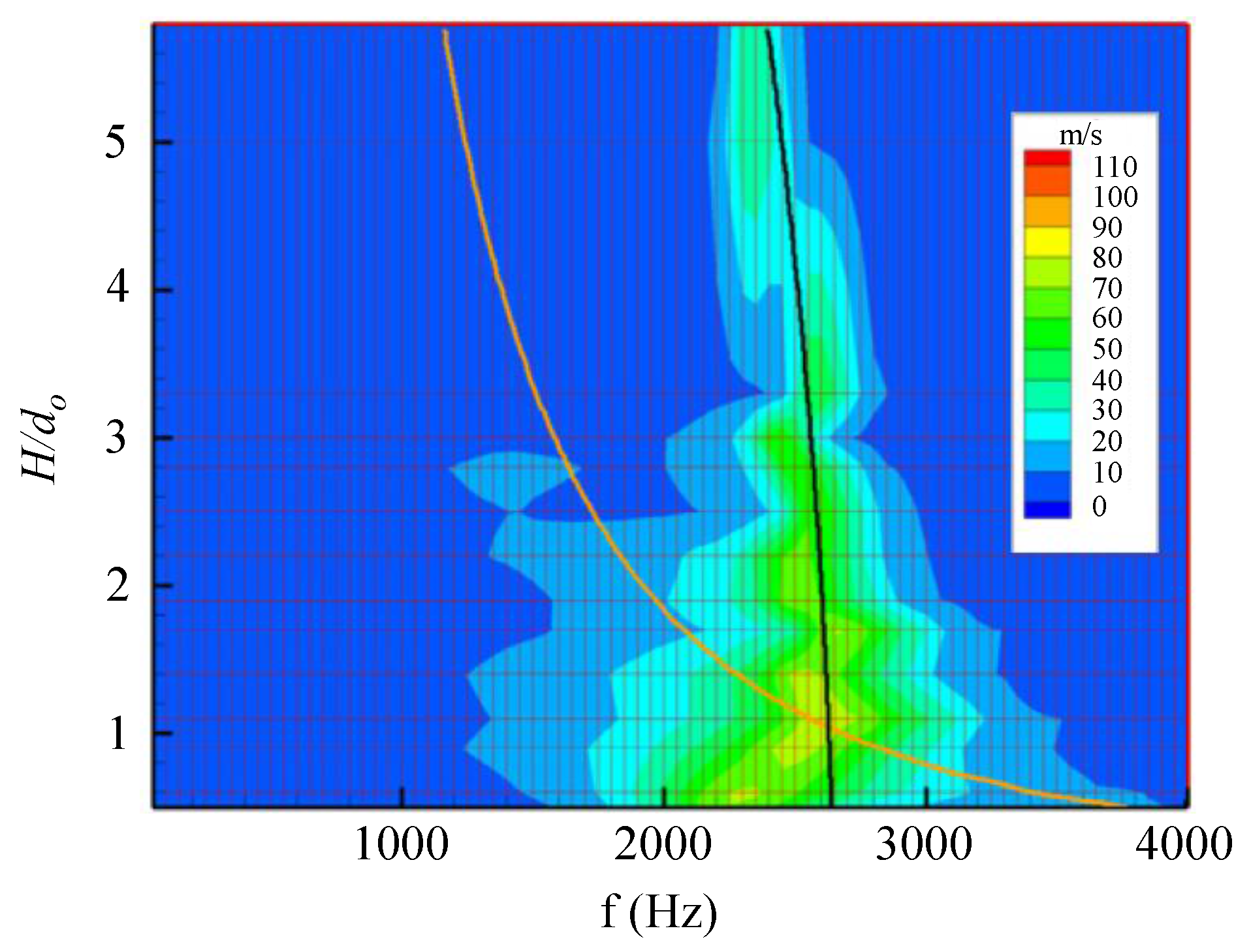
Figure 4 shows the variations of the coupled structural frequency (black line) and of the Helmholtz frequency (orange line) as functions of the dimensionless chamber height.
These results will be further discussed in
Section 4 along with comparisons to experimental findings. It is interesting to observe that some experimentalists do not measure the jet velocity at the orifice section, but about one-diameter downstream of the exit, i.e., approximately at the stagnation point (named also saddle point), by means of a rather simple Pitot tube. To understand the correlation between the saddle point velocity and the orifice (centerline) peak velocity, it is convenient to recall some characteristic quantities of the device. Since the jet formation is related to the ability of the vortex ring produced in the ejection phase to escape during the ingestion phase, a parameter characterizing the jet strength is the so called stroke length
, namely the integral of the spatially averaged velocity at the orifice exit over the cycle ejection phase only:
where
T is the actuation period. A proper reference velocity is introduced via the relation
or, in other terms, as:
which is usually refereed to as stroke length velocity. According to classic literature findings (Smith and Glezer (1998) [
15] and Smith and Glezer (2002) [
3]), the saddle point velocity,
, is roughly
times the stroke length velocity, which in turn, for sinuous time variation of the exit velocity, is related to its peak value by
. Thus, to compare experimental measurements to numerical computations of the peak value
, the following relationship is used:
The frequency response of SJ actuator is presented very often in terms of saddle point velocity, as will be hereafter reported when discussing overall data of literature.
It is worth to observe that in the fluid dynamic LEM approach the time dependent governing equations constitute an initial value problem to be integrated numerically by means of more or less standard numerical schemes such as Runge-Kutta methods. Details about the numerical procedure are reported in Sharma [
31] and de Luca et al. [
32]. Here, the numerical simulations are carried out in MATLAB environment with
ode45 routine. Initial conditions of
,
,
and
are assumed in the computations. It has been observed that the quasi-steady oscillatory solution is generally reached in about 20–30 cycles. Typical values of the electroacoustic transduction coefficient
that best fit the continuous numerical curves to the velocity measurements range from 40 to 150 Pa/V, depending on the actuator under consideration. Such values are compatible with physical values reported by Gallas et al. [
23] and Prasad et al. [
24].
2.2. Analytical Stationary Solution
It has been already observed that the LEM modeling based on the electric circuit analogy yields basically the periodic stationary solution. The LEM electric analogy will be treated in the next section. Hereafter, an analytical
modal approach to obtain the stationary solution of the jet velocity will be described, starting from the LEM fluid dynamics equations. Note that, in spite of the presence of the nonlinear damping term in the acoustic oscillator model, Equation (
11), the
modal approach is successful because the non-linearity is represented by the modulus of the unknown
U. The following development represents an original reformulation of the previous one reported in de Luca et al. (2016) [
33], including a specific evaluation of the magnification factor in resonance conditions, as well as some asymptotic estimates.
The dynamic model constituted by Equations (
11) and (
13) can be conveniently rewritten as
Equation (
22) is representative of a canonical damped spring-mass oscillators system, with the peculiar feature of having a non-linear damping factor. Note also that the
stiffness matrix is explicitly shown, see Equations (
12) and (
14). A graphical representation of this system is provided in
Figure 5, where
,
, and
.
Steady-state solutions can be sought by introducing the
normal mode assumption:
where
and
are complex quantities. Also,
is substituted to
. It is worth to note that
.
The resulting algebraic, non-linear system can be implicitly solved to give the
amplification factor of the maximum jet velocity with respect to the incompressible velocity,
. Upon back-substitution of the undamped (coupled) resonance frequencies
, Equation (
15), one obtains
where the known relationship
has been acknowledged,
,
, and
is defined as the
coupling factor of the two oscillators:
Also,
and
are the non-dimensional structural and fluid dynamic (or acoustic) damping factors respectively. Furthermore, observe that the dimensionless frequency
can be related to the operation Strouhal number, which will be introduced in next
Section 2.4. Since the Equation (
24) is still implicit in
, it has to be solved numerically to obtain the analytical stationary solution of the jet velocity as a function of the operating frequency
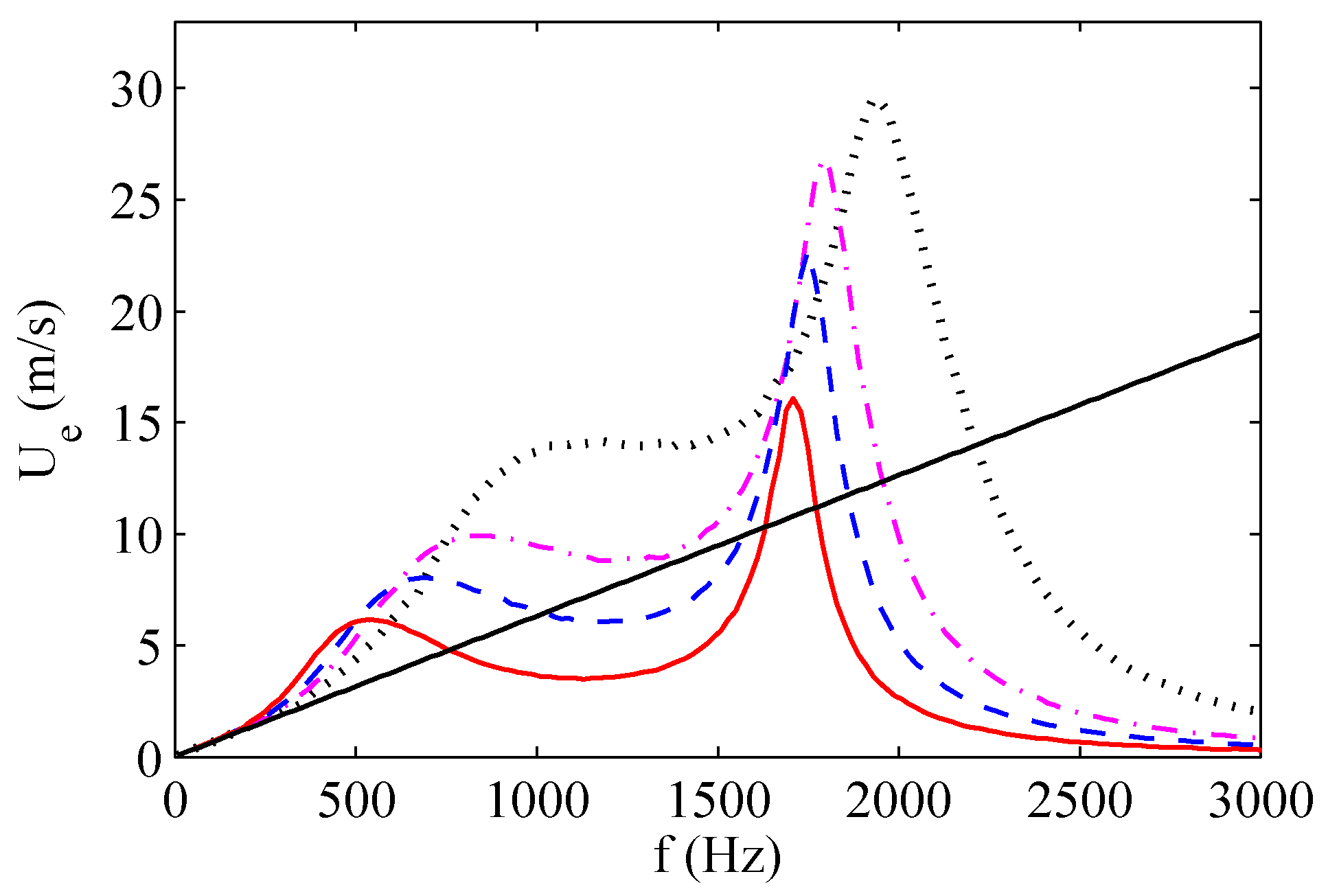
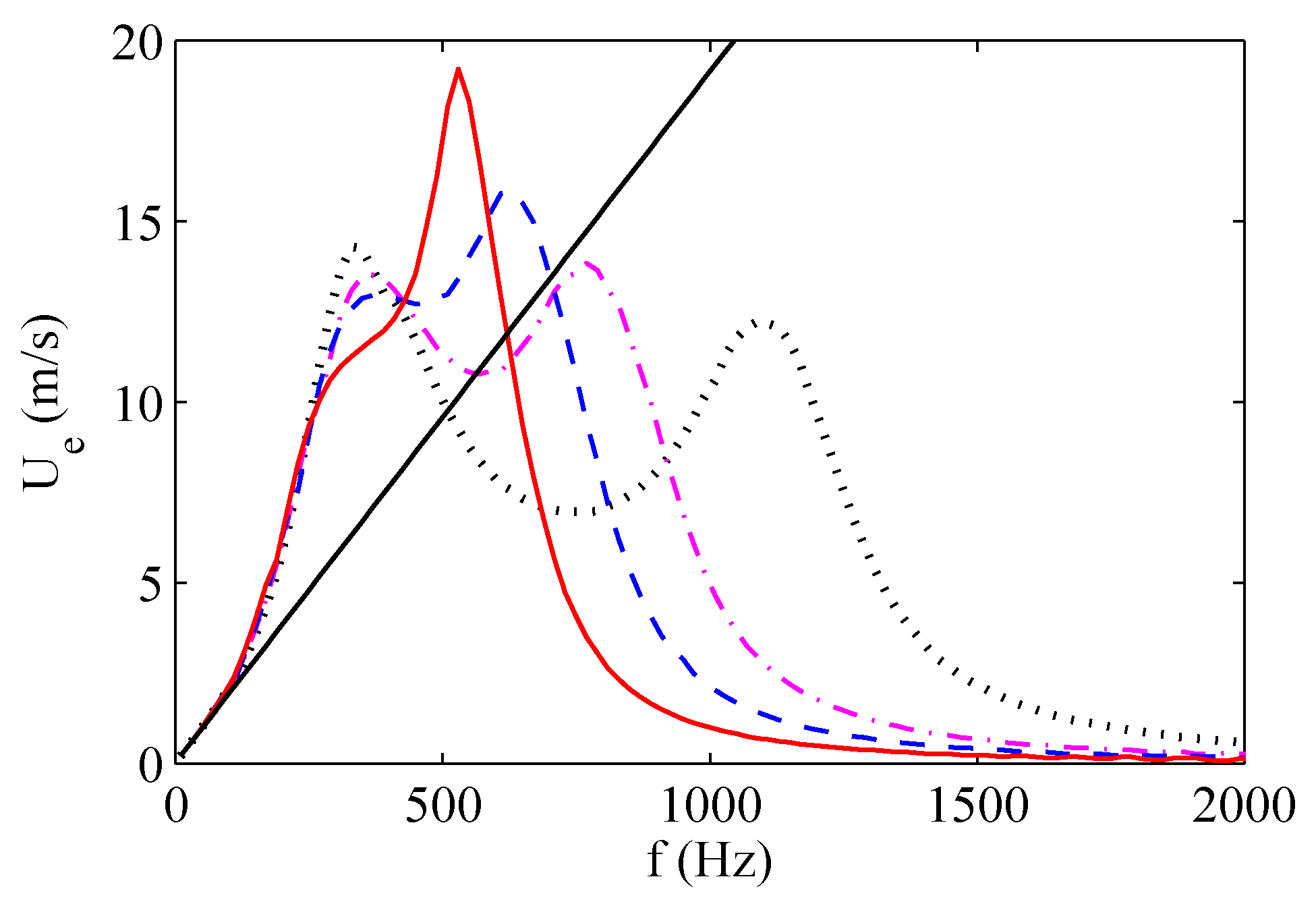
. Some of these solutions will be reported in
Section 3, when discussing comparisons of LEM results available for the devices tested by de Luca et al. [
33].
Various simplified relationships can be derived starting from the basic Equation (
24), which can be used to confirm the numerical predictions presented in
Section 4. For instance, in the case of uncoupled oscillators (
),
and
, thus Equation (
24) becomes:
The amplification factor can be conveniently evaluated in correspondence of the resonance frequencies. In particular, when the system is driven at
, one obtains:
while a perfectly specular expression can be obtained when
Note that Equations (
27) and (
28) resemble very closely the canonical response of a damped spring-mass oscillator and that the ratio
can be related to the
parameter introduced before. Equation (
27) can be rearranged to give a compact closed-form expression for the amplification factor
where
and
. The amplification factor given in Equation (
29) depends exclusively on three non-dimensional parameters:
,
, and
. Since the structural damping factor is typically equal to
, the acoustic damping and the resonance frequencies ratio can be used as free design parameters to optimize the actuator response. In
Figure 6, Equation (
29) is plotted as a function of
for three values of
. Apparently, for very small coupling factors and in the (common) case of
, it is convenient to design the actuator so to have a small resonance frequencies ratio and (clearly) as small acoustic damping factors as possible. Also,
Figure 6 shows that for the cases here analyzed, an actuator having
higher than about 4 is inconvenient since no amplification occurs. However, the above reasoning has to be augmented with efficiency considerations that will be made in
Section 5.
Phase angles (with respect to the input supply) can also be computed. The diaphragm velocity phase angle
reads:
Additional insights can be obtained by again considering
,
It is easy to check from Equation (
31) that when the diaphragm is driven at the structural resonance frequency, i.e.,
, the phase angle of the diaphragm equals
,
For what concerns the phase angle of the jet velocity, its general expression reads
Again, under the hypothesis of decoupled oscillators, one has:
The phase angle occurring when the system is driven at
reads:
Upon inspection of Equations (
31)–(
35), several considerations can be drawn for the common case in which the system is driven at the structural resonance frequency:
if the structural resonance frequency equals the Helmholtz frequency (i.e.,
), there is a
phase difference between the diaphragm and the jet,
if the structural frequency is much higher than the resonance frequency (
), then:
and the diaphragm and the jet are out of phase by
if the structural resonance frequency is very small (
), then the compressible effects are negligible and the diaphragm and the jet are in phase with each other:
Similar considerations can be drawn for the general expressions given in Equations (
30)–(
33), for the limiting cases in which the system is driven at very low or very high frequencies, i.e.,
or
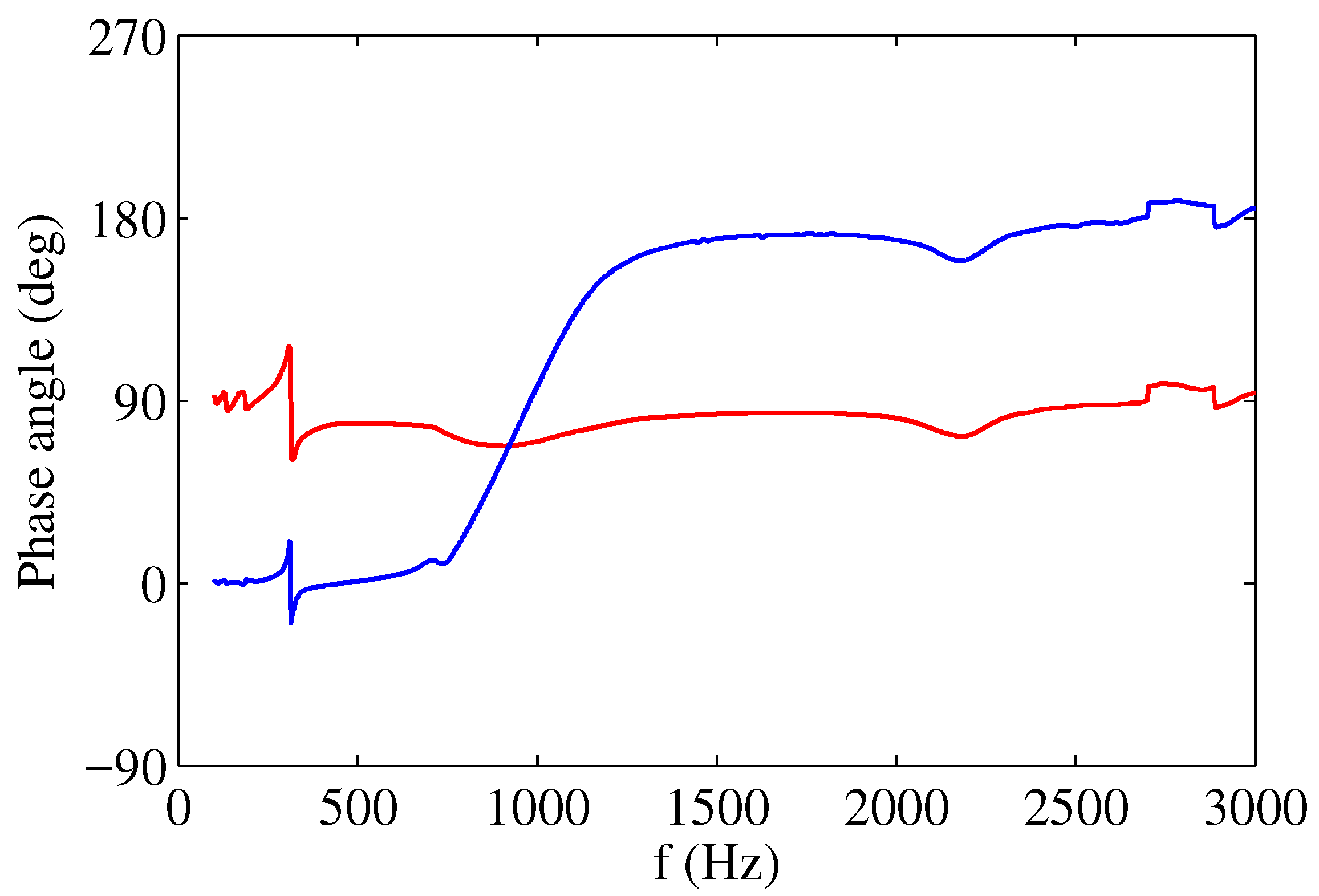
. The above results are in close qualitative agreement with the results obtained by Sharma [
31] and reported in
Figure 7.
2.3. Transduction Approach
A useful tool to study the behavior of an actuator, once it has been represented into a lumped mechanical system (basically including the oscillating diaphragm, the cavity and the orifice), consists in using the electric-mechanical analogy. This method considers the construction of an equivalent circuit in which an inductor represents the lumped mass (essentially the diaphragm), a capacitor reproduces the effects of the compliance (representing the elasticity of both the diaphragm and air), and a resistor symbolizes the damper (representing the structural and fluidic dissipation causes). In LEM formulation, these basic elements are able to exchange energy among themselves. In general, different energy domains can be introduced, and for each one, an effort
and a flow
are conveniently defined, see Mohseni and Mittal [
17] and Senturia [
38]. The power flow from one element to the other is given by the product of the effort by the corresponding flow. A useful correspondence for SJ devices is listed in
Table 1.
A synthetic jet actuator is an electroacoustic device which involves different forms of energy, such as, electrical (input power), electrodynamical (stored in the diaphragm) and kinetic (of the air jet), Girfoglio et al. [
39]. Following the work of Gallas [
23], the changes between these different forms can be analyzed by using a two-port network where elements sharing a common effort (i.e., pressure or voltage) are connected in parallel, whereas those sharing a common flow (i.e., air volumetric flow rate or current) are connected in series. Therefore, the problem concerns the representation of these elements in the acoustic/fluidic domain and the determination of the corresponding electric impedances in the electric one. In LEM formulation, a device can be represented by two-coupled lumped mechanical systems (both of mass-spring-damper type), namely the diaphragm and the cavity/orifice, in which the kinetic energy is associated to a lumped mass
m, the potential energy to a lumped spring of stiffness
k (or compliance,
, according to Equation (
9)) and the dissipation to a lumped dumper of coefficient
c, as sketched in
Figure 5. For the sake of clarity the reader is referred also to Equation (
22).
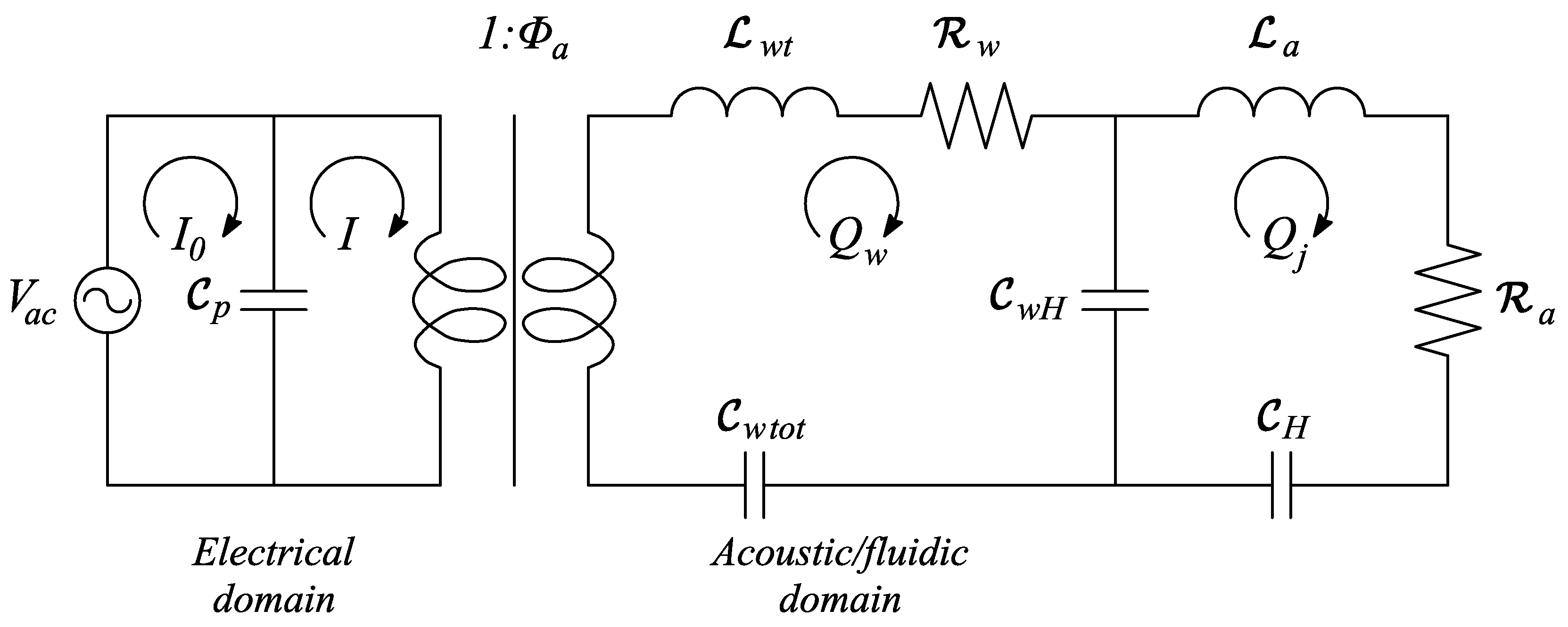
In case the SJ is realized with an electromechanical element, such as a piezoelectric thin disk, the equivalent electric circuit is depicted in
Figure 8, which corresponds strictly to the mechanical system of
Figure 5, where the transduction from the electrical to the acoustic/fluidic domain is represented through an ideal transformer, having the transformation ratio equal to the electroacoustic transduction coefficient,
. Within the framework of the mass-inductance analogy, the inductances
and
correspond to the diaphragm and orifice air masses, respectively, the capacitances
,
,
and
correspond to the blocked electrical capacitance of the piezoelectric diaphragm (for more details see Prasad et al. [
22]), the total diaphragm stiffness (including both parallel structural and acoustic stiffnesses,
and
, respectively), the coupling stiffness and the Helmholtz stiffness, respectively, and the resistances
and
correspond to the structural and fluidic damping factors, respectively.
In fact, for an ideal transformer with unit electrodynamic transduction efficiency, i.e., the Joule power provided to the piezo-element equals the electrodynamic power (detailed insights on the actuators energy efficiency will be discussed in
Section 5), it holds:
which can be also written in terms of cavity pressure and wall volumetric flow rate
By taking into account that the driving force magnitude is expressed by Equation (
4), and by considering the relationships given in Equations (
7) and (
9), one obtains finally
As already stated above, the solution to the electric LEM equations is usually expressed in terms of periodic stationary behavior of the actuator, where the ratio of the output air jet flow rate to the input voltage is given by the equivalent impedance. With reference to
Figure 8, and following Gallas et al. [
23], denoted with
,
, and
the total impedances of the diaphragm, cavity, and orifice respectively, one obtains:
where
is the volumetric flow rate of air issuing from the orifice (i.e., corresponding to the air jet velocity
U). A major goal of the device design is to maximize the magnitude of the volumetric flow rate through the orifice per applied voltage,
. It has to be stressed that for the approach followed in the present paper the relevant impedances are directly related to the mechanical quantities defined, for instance, in
Figure 5; however, within the equivalent circuit model analysis, such impedances are evaluated in a specific way component by component, as made by Gallas et al. [
23] and Mohseni and Mittal [
17]. The way in which the electric circuit LEMs evaluate the impedances makes these approaches different from the fluid dynamic-based LEMs.
Starting from Equation (
43) it is possible in principle to calculate the coupled resonance frequencies of the system. This analysis has been performed by Gallas et al. [
23], who developed a non-closed form procedure to obtain such frequencies, under the assumption of small damping effects, and compared the computed frequencies with experimental data, as well as with the corresponding uncoupled values. The approach of Gallas et al. [
23] is based on the already mentioned relationship
, where
and
are the coupled natural frequencies. The reader is referred to the original paper to obtain more details. Note that in the present paper the relationships of de Luca et al. [
32] have been already reported in Equation (
15) which, in agreement with the constraint of Gallas et al. [
23], predicts that the coupling effect augments the greatest uncoupled frequency and reduces the lowest one. Additional information about the evaluation of the two modified resonance frequencies can be found in Persoons [
25], who employed a simplified heuristic argument and referred to loudspeaker-driven actuators.
2.4. Dimensionless Equations
With the aim of providing further insights to the problem physics, the governing equations analyzed previously can be recast into a convenient dimensionless form, de Luca et al. [
33].
The nondimensionalization process relies on the choice of proper reference scales for time, length and velocity; for the equation of dynamics of the acoustic oscillator, Equation (
11), a convenient set of quantities is represented by the reciprocal of the operating frequency
, the cavity height
H and the air speed of sound
c, respectively. The nondimensional form of the equation is thus
where the Strouhal number, defined as:
can be re-written in function of other parameters:
The condition
represents the case of acoustically thin cavity, for which the traveling time of a small pressure disturbance, over the distance
H, is much smaller than the reference time
. From an operative point of view, the air inside the cavity behaves as an incompressible medium (i.e., the air stiffness is infinite), and Equation (
44) in this case reduces to the (dimensional) relationship:
This means that the volume flow rate entering the cavity, as a consequence of the diaphragm displacement, equals the volume flow rate of air expelled through the orifice. On the other hand, Equation (
1) shows that the diaphragm dynamics is decoupled from that of the acoustic oscillator, with the diaphragm being driven by the piezoelectric forcing only. One can easily verify this result by examining the electric circuit of
Figure 8, for a null air capacitance (or null air elastic compliance). When
, once the air velocity at the orifice has been obtained from Equation (
47), the cavity pressure may be evaluated by using the unsteady form of the Bernoulli’s equation. In the following, one will refer to Equation (
47) as the
incompressible model of operation.
It is also convenient to observe that, for small concentrated head losses, the driving differential pressure has to be of the same order as the dynamic pressure at the orifice in the Bernoulli’s equation, that allows the determination of a more appropriate scale velocity of the orifice jet, . Since, through the isentropic transformation of perfect gas, the pressure variation related to the orifice volume variation , with being the axial variation scaling with , scales with , one finally obtains . As a consequence, it is easy to verify that the Strouhal number is directly represented by the ratio , namely formally by .
Another relevant condition occurs for
, which also corresponds to decoupled diaphragm dynamics. In this case the air stiffness is vanishing, the pressure field inside the cavity is practically unperturbed, and therefore the air jet velocity U is vanishing too. Again one can uncover this situation by taking a look at
Figure 8. It is worth noting that for this condition the lumped assumption is of course invalid, hence it has not been considered during the device performance evaluation (
Section 4). However, the Strouhal number is quite less than unity even at the highest operation frequencies generally considered in the plots shown in the paper; for instance, for
and
it results
.
Equation (
13) is made dimensionless with the introduction of different time and velocity scales; here, convenient choices are
and
, respectively. The non-dimensional form of such an equation is:
where the coupling parameter
has been introduced in Equation (
25). Note that under the condition
(which means that the air stiffness is negligible in comparison with the diaphragm stiffness) the diaphragm dynamics is decoupled from the acoustic oscillator one. In this case the jet velocity and the cavity pressure are determined via the continuity and the unsteady Bernoulli’s equations. Furthermore, the modified structural and Helmholtz’s frequencies tend to coincide with the corresponding uncoupled frequencies, as one may verify by inspecting Equation (
15). It has to be also stressed that, in general, the coupling effects represented by the
parameter refer to a certain device and may be neglected on the basis of design characteristics of the actuator, whatever is the operating condition. On the contrary, the conditions of decoupling occurring for
depend basically on the operating condition and may occur for any device.
The inclusion of the effects of the external viscous medium (air) leads to the introduction of the jet Reynolds and Stokes numbers (e.g., Smith and Glezer [
3])),
and
, as indicated in
Table 2, which summarizes all the nondimensional parameters affecting the actuator operation (with
and
being the orifice diameter and the diaphragm diameter, respectively).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}