
Two-Dimensional DOA Estimation for Coherently Distributed Sources with Symmetric Properties in Crossed Arrays


Abstract
:1. Introduction
2. Signal Model
3. The Proposed Algorithm
3.1. Symmetric Property of an ASDW Vector in a Centro-Symmetric Array
3.2. Derivation
3.2.1. Central Elevation DOA Estimation
3.2.2. Central Azimuth DOA Estimation
3.2.3. The Parameter Matching Method
3.2.4. Algorithm Implementation and Complexity Analysis
- Step 1:
- Calculate the covariance matrix . Through the eigen-decomposition of , obtain the signal subspace matrix .
- Step 2:
- Construct the matrix in (22), and root the polynomial in (24) to obtain the central elevation DOA estimations for . It is noted that the roots are inside a unit circle and maximize (23).
- Step 3:
- Calculate the covariance matrix . Through the eigen-decomposition of , obtain the signal subspace matrix .
- Step 4:
- Construct the matrix in (28), and root the polynomial in (29) to obtain for . It is noted that the roots are inside a unit circle and maximize (30).
- Step 5:
- Compute all the possible 2D DOAs for the elevation DOA estimations . Calculate the function values for in (37). The largest one is the correct match.
- Step 6:
- Repeat the process in Step 5 to match all the parameters.
4. Simulation Results and Performance Analysis
4.1. Effect of Different Deterministic Angular Distributed Functions
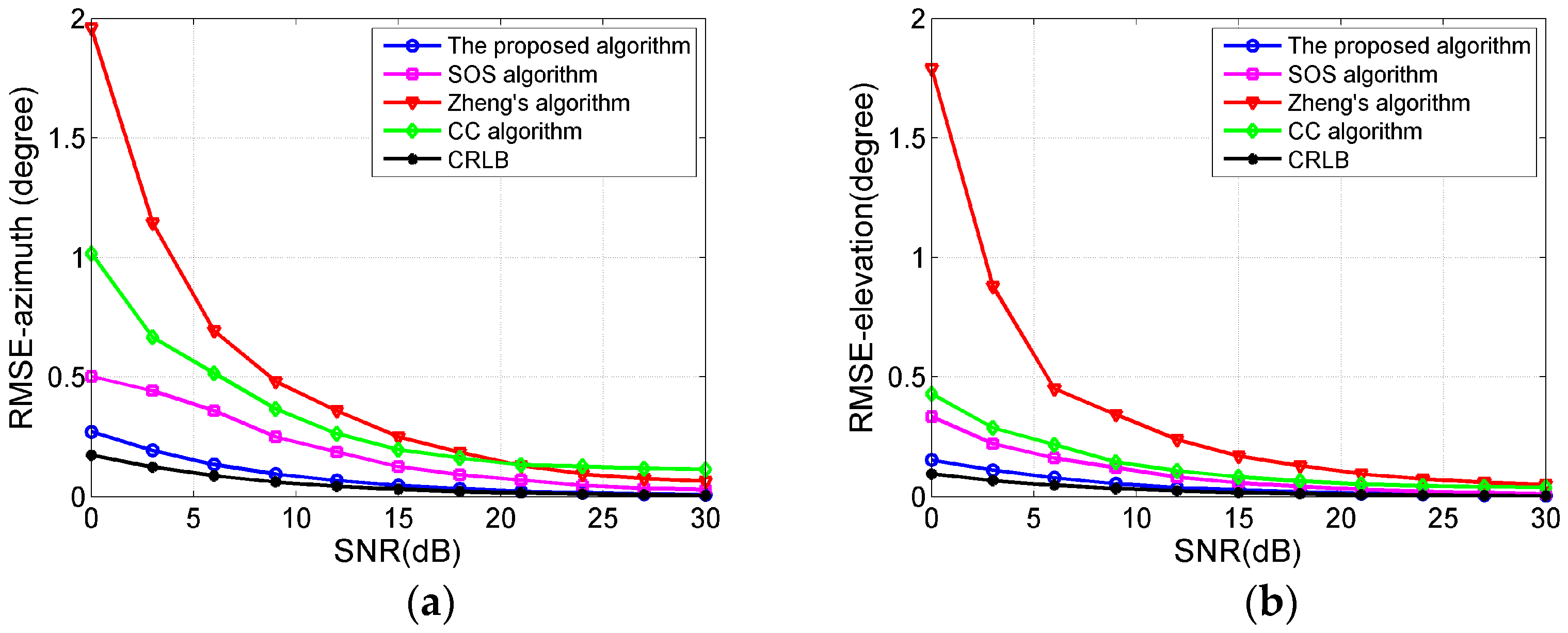
4.2. Performance Comparison
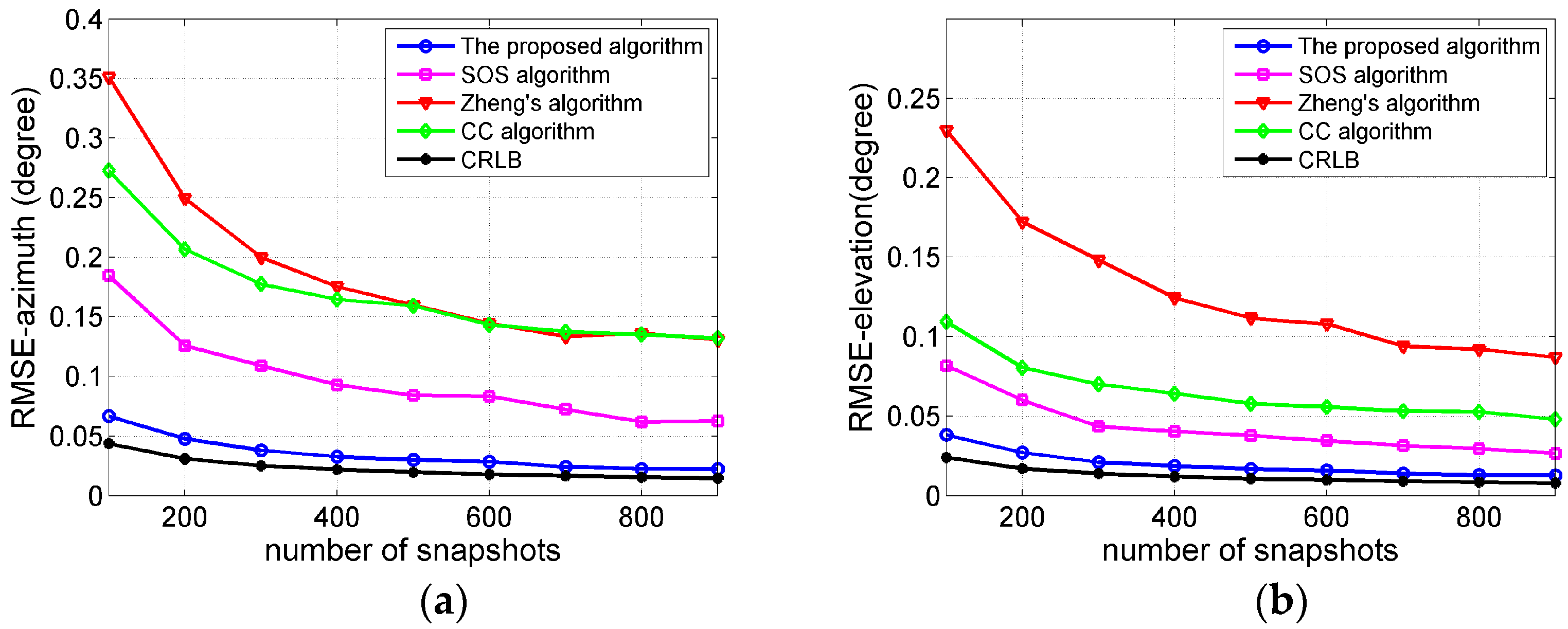
4.3. Effect of Snapshots
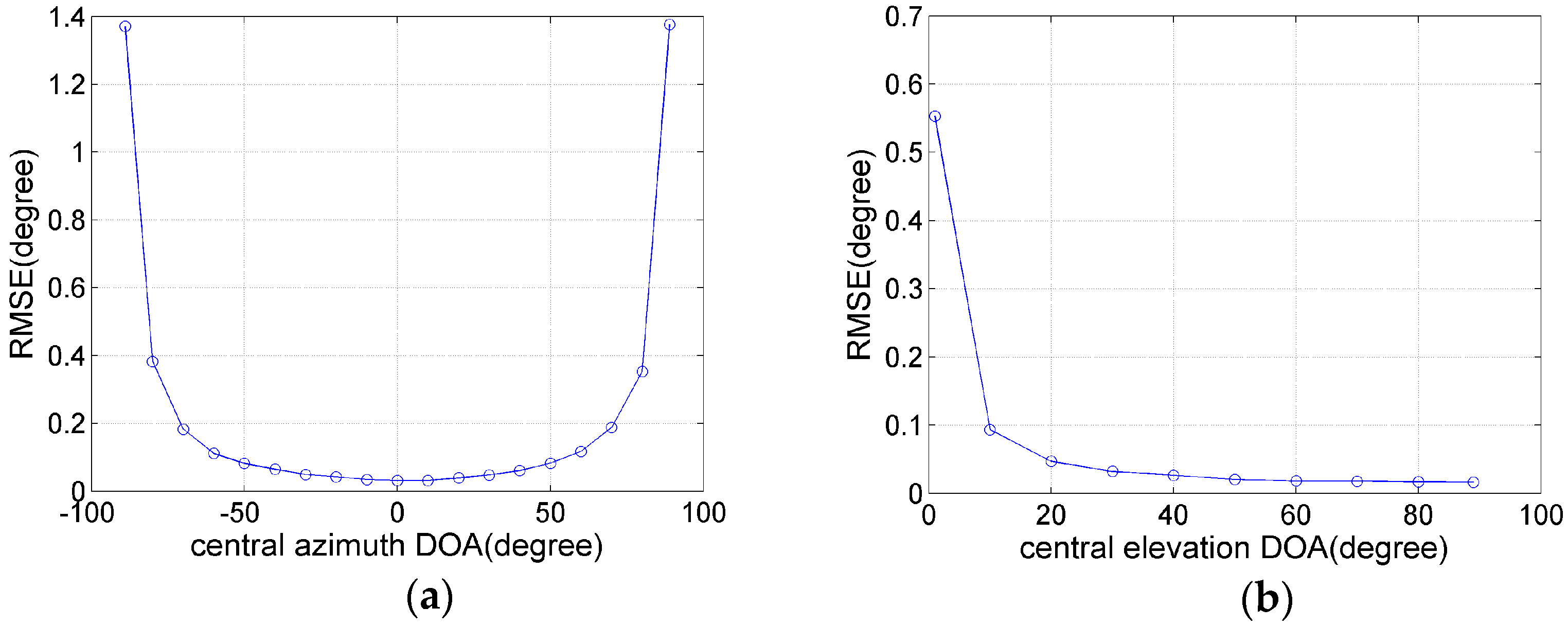
4.4. Effect of the Central Elevation and Azimuth DOAs
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Mccloud, M.L.; Scharf, L.L. A new subspace identification algorithm for high-resolution DOA estimation. IEEE Trans. Antennas Propag. 2002, 50, 1382–1390. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, X.; Sheikh, Y.A.; Ye, Z. A rank-reduction based 2-D DOA estimation algorithm for three parallel uniform linear arrays. Signal Process. 2016, 120, 305–310. [Google Scholar] [CrossRef]
- Yan, F.; Jin, M.; Qiao, X. Low-complexity DOA estimation based on compressed MUSIC and its performance analysis. IEEE Trans. Signal Process. 2013, 61, 1915–1930. [Google Scholar] [CrossRef]
- Vallet, P.; Mestre, X.; Loubaton, P. Performance analysis of an improved MUSIC DOA estimator. IEEE Trans. Signal Process. 2015, 63, 6407–6422. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, D. Low-complexity ESPRIT-based DOA estimation for colocated MIMO radar using reduced-dimension transformation. Electron. Lett. 2011, 47, 283–284. [Google Scholar] [CrossRef]
- Suleiman, W.; Pesavento, M.; Zoubir, A.M. Performance analysis of the decentralized eigendecomposition and ESPRIT algorithm. IEEE Trans. Signal Process. 2016, 64, 2375–2386. [Google Scholar] [CrossRef]
- Besson, O.; Stoica, P. Decoupled estimation of DOA and angular spread for spatially distributed sources. Conference Record of the Thirty-Third Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 24–27 October 1999; pp. 253–257. [Google Scholar]
- Cao, R.; Gao, F.; Zhang, X. An angular parameter estimation method for incoherently distributed sources via generalized shift invariance. IEEE Trans. Signal Process. 2016, 64, 4493–4503. [Google Scholar] [CrossRef]
- Valaee, S.; Champagne, B.; Kabal, P. Parametric localization of distributed sources. IEEE Trans. Signal Process. 1995, 43, 2144–2153. [Google Scholar] [CrossRef]
- Meng, Y.; Stoica, P. Estimation of direction of arrival of spatially dispersed signals in array processing. IEEE Proc. Sonar Navig. 1996, 143, 1–9. [Google Scholar] [CrossRef]
- Wu, Q.; Wong, K.M.; Meng, Y.; Read, W. DOA estimation of point and scattered sources—Vec-Music. Processing of the IEEE Seventh SP Workshop on Statistical Signal and Array Processing, Quebec, QC, Canada, 26–29 June 1994; pp. 365–368. [Google Scholar]
- Besson, O.; Stoica, P. Decoupled estimation of DOA and angular spread for a spatially distributed source. IEEE Trans. Signal Process. 2008, 48, 1872–1882. [Google Scholar] [CrossRef]
- Bengtsson, M.; Ottersten, B. Low-complexity estimators for distributed sources. IEEE Trans. Signal Process. 2000, 48, 2185–2194. [Google Scholar] [CrossRef]
- Shahbazpanahi, S.; Valaee, S.; Bastani, M.H. Distributed source localization using ESPRIT algorithm. IEEE Trans. Signal Process. 2001, 49, 2169–2178. [Google Scholar] [CrossRef]
- Boujemâa, H. Extension of COMET algorithm to multiple diffuse source localization in azimuth and elevation. Eur. Trans. Telecommun. 2005, 16, 557–566. [Google Scholar] [CrossRef]
- Lee, J.; Song, I.; Kwon, H.; Lee, S.R. Low-complexity estimation of 2D DOA for coherently distributed sources. Signal Process. 2003, 83, 1789–1802. [Google Scholar] [CrossRef]
- Guo, X.S.; Wan, Q.; Yang, W.L.; Lei, X. Low-complexity 2D coherently distributed sources decoupled DOAs estimation method. Sci. Chin. Inf. Sci. 2009, 52, 835–842. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, G.; Teng, Y. Simplified Estimation of 2D DOA for Coherently Distributed Sources. Wirel. Pers. Commun. 2012, 53, 907–922. [Google Scholar] [CrossRef]
- Yang, X.; Li, G.; Zheng, Z.; Zhong, L. Low-complexity 2d central DOA estimation of coherently distributed sources with cross-correlation matrix. Electron. Lett. 2014, 50, 1118–1120. [Google Scholar] [CrossRef]
- Liu, S.; Yang, L.; Wu, D.; Huang, J. Two-dimensional DOA estimation using a co-prime symmetric cross array. Prog. Electromagn. Res. C 2014, 54, 67–74. [Google Scholar] [CrossRef]
- Shi, Y.; Huang, L.; Qian, C.; So, H. Direction-of-arrival estimation for noncircular sources via structured least squares–based esprit using three-axis crossed array. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1267–1278. [Google Scholar] [CrossRef]
- Wang, X.; Mao, X.; Wang, Y.; Zhang, N.; Li, B. A novel 2-D coherent DOA estimation method based on dimension reduction sparse reconstruction for orthogonal arrays. Sensors 2016, 16, 1496. [Google Scholar] [CrossRef] [PubMed]
- Yan, F.; Shen, Y.; Jin, M.; Qiao, X. Computationally efficient direction finding using polynomial rooting with reduced-order and real-valued computations. J. Syst. Eng. Electron. 2016, 27, 739–745. [Google Scholar]
- Ghogho, M.; Besson, O.; Swami, A. Estimation of directions of arrival of multiple scattered sources. IEEE Trans. Signal Process. 2001, 49, 2467–2480. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Main Computational Complexity |
|---|---|
| Proposed algorithm | |
| SOS algorithm | |
| CC algorithm | |
| Zheng’s algorithm |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Z.; Cui, W.; Ba, B.; Wang, D.; Sun, Y. Two-Dimensional DOA Estimation for Coherently Distributed Sources with Symmetric Properties in Crossed Arrays. Sensors 2017, 17, 1300. https://doi.org/10.3390/s17061300
Dai Z, Cui W, Ba B, Wang D, Sun Y. Two-Dimensional DOA Estimation for Coherently Distributed Sources with Symmetric Properties in Crossed Arrays. Sensors. 2017; 17(6):1300. https://doi.org/10.3390/s17061300
Chicago/Turabian StyleDai, Zhengliang, Weijia Cui, Bin Ba, Daming Wang, and Youming Sun. 2017. "Two-Dimensional DOA Estimation for Coherently Distributed Sources with Symmetric Properties in Crossed Arrays" Sensors 17, no. 6: 1300. https://doi.org/10.3390/s17061300
APA StyleDai, Z., Cui, W., Ba, B., Wang, D., & Sun, Y. (2017). Two-Dimensional DOA Estimation for Coherently Distributed Sources with Symmetric Properties in Crossed Arrays. Sensors, 17(6), 1300. https://doi.org/10.3390/s17061300