1. Introduction
Array signal processing is extensively used for noise removal and signal enhancement in underwater environments with low SNR (see, e.g., [
1,
2,
3]). The delay-and-sum (DAS) beamforming and the minimum variance distortionless response (MVDR) [
4] methods are the two most important beamforming methods. The MVDR method is a well-known data-dependent filter which is aimed at minimizing the energy of noise and interference coming from different directions, while keeping a fixed gain on the desired direction of arrival. The robustness of the MVDR method is related to the number of snapshots, channel amplitude and phase errors, input SNR, and position errors. However, the MVDR method is not robust in many practical applications. A popular approach to improve the robustness is the diagonal loading method presented in [
5]. The main limitation of the diagonal loading method is that the process of efficiently picking the penalty weight is not clear, although useful data-dependent methods have been proposed for specific applications (see, e.g., [
6,
7]). By contrast, the DAS method is more robust, so it is widely used in the underwater array signal processing. However, the noise removal capacity of the method is limited by the array aperture. As a consequence, the low SNR environment seriously degrades the performance of this method.
Another problem is that the actual underwater ambient noise is complex (see, e.g., [
8,
9,
10,
11]), and the noise spatial correlation function [
9] is not equal to zero. The received noises of the two arbitrary array elements are correlated. Typically, the beamforming methods are derived under the assumption of white noise, whose noise covariance matrix is a scaled identity matrix. Although this assumption has been observed to be valid in many applications, it may be occasionally violated and yield poor performance because, in practice, the noise spatial correlation function [
9] is not equal to zero.
In conclusion, studying the array signal processing method in complex noise environments with low SNR is a challenging task. To address this problem, a large number of strategies have been proposed. On the one hand, the noise is removed by estimating the noise parameters. In [
12], the noise field is assumed as a colored noise field, and the direction of arrival and noise parameters are estimated by maximum- likelihood estimator. In [
13,
14], the noise covariance matrix is assumed to keep a diagonal structure, but the diagonal entries are not identical to each other. Then, the noise subspace is obtained. On the other hand, the noise is removed by eliminating the real part of the covariance matrix. A research group proposed a high-resolution bearing estimation method for weak signals in non-white noise field in [
15] and compared the performance of the multiple-signal classification (MUSIC) method with that of the MUSIC method in which only the imaginary part of the covariance matrix is applied in [
16]. These methods provide better bearing estimation and high resolution in a low SNR environment under an ideal noise model. In practice, the ideal model cannot be entirely satisfied, and the noise is always complex in underwater environments. Thus, these methods are limited. To address this problem, the authors proposed a new noise reduction method that is suitable for complex noise environments with low SNR (see, e.g., [
17,
18]). Another serious problem is that the aforementioned methods may seriously suppress the signal (see, e.g., [
15,
16]); thus, the signal cannot be detected. To address this problem, we proposed two methods in [
17], but the use of these two methods is limited. We also designed the array configuration and selected the suitable working frequency in [
18]. In [
17,
18], the noise reduction method is based on the assumption that the noise sources are located in a plane, which is not practical. By contrast, the noise reduction method proposed in this manuscript is based on the fact that the actual received noise is from three- dimensional space. Consequently, the proposed method is more generally applicable and can be extended to any array.
In this study, a noise removal method is proposed. The received noise (see, e.g., [
19,
20,
21,
22,
23,
24]), which is from the 3D space, can be accurately modeled by adding the fields from a large number of uncorrelated sources (see, e.g., [
24,
25,
26,
27]). Theoretically, the noise covariance matrix is decomposed into symmetrical and asymmetrical components. Therefore, the imaginary part of the covariance matrix is used in the DAS method to remove symmetrical noise in which a false target appears. To address the problem, a method of reconstructing the signal covariance matrix is presented to eliminate the false target based on the constrained optimization method (CP-RCMDAS) presented in [
17,
18]. In this study, two methods of reconstructing the signal covariance matrix are presented to eliminate the false target: based on the signal variance estimation method (SVE-RCMDAS) and CP-RCMDAS. The advantages and disadvantages of the two methods are first compared. Theoretical analysis and experimental results show that the proposed method, which is easy to implement, improves the noise removal capacity and the output SNR of the DAS method in complex underwater environments with low SNR.
The remainder of this paper is organized as follows:
Section 2 describes the signal model, gives the definition of the symmetrical noise sources, and the spatial correlation of these two symmetrical noise sources is derived.
Section 3 gives the principle of the noise covariance matrix decomposition. The noise removal method and its performance are provided in
Section 4. Both simulation results provided in
Section 5 and experimental results provided in
Section 6 demonstrate the validity of our proposals. Finally,
Section 7 concludes this paper.
3. Noise Covariance Matrix Decomposition
In this Section, the principle of noise covariance matrix decomposition is presented. Based on the
Section 2.2 and
Section 2.3, the symmetrical noise sources cannot affect the imaginary part of the correlation function. In practice, the received noise signal of the sensor array is from 3D space, not from two symmetrical noise sources. Thus, the decomposition of the noise covariance matrix should be studied in this section under the actual underwater ambient noise.
The received noise can be accurately modeled by adding the fields from a large number of uncorrelated sources (see, e.g., [
24,
25,
26,
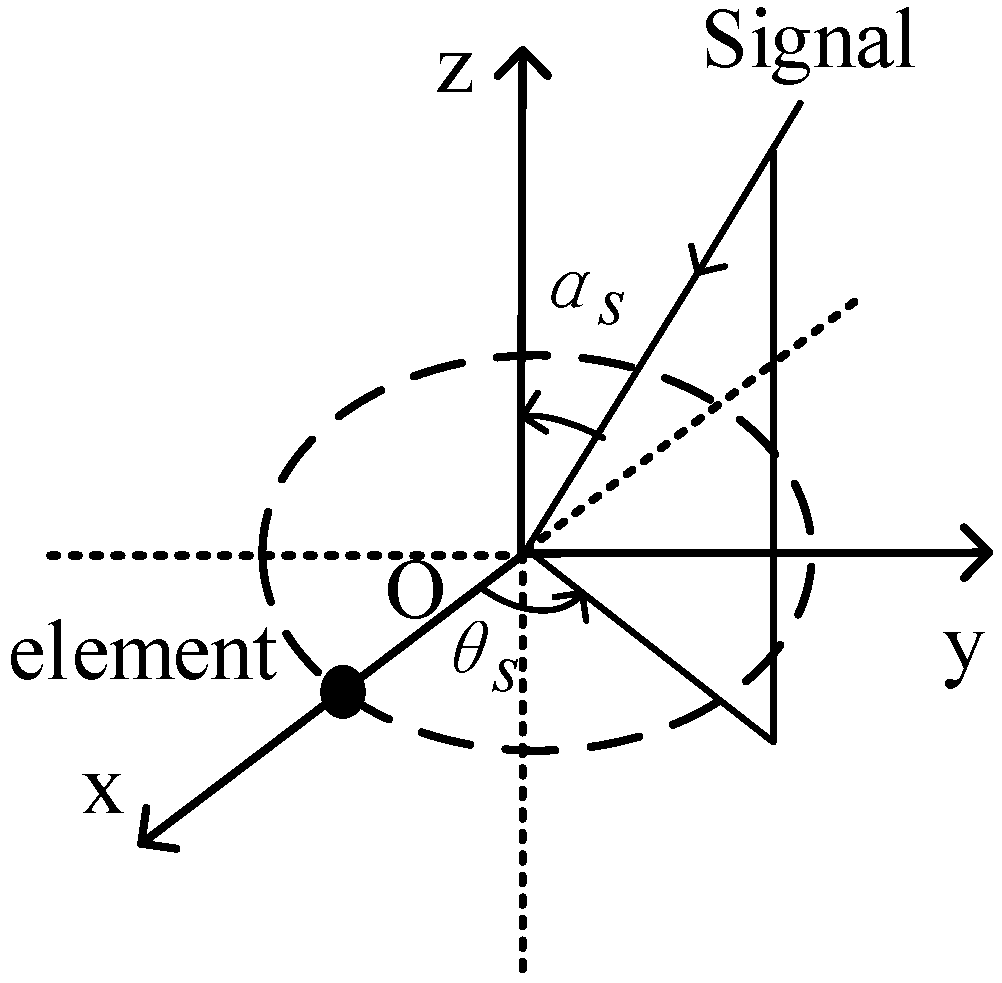
27]). The noise field is assumed to be generated by the
G noise sources, which are denoted as
,
g = 1, 2, …,
G. The center frequency is
f, the azimuth angle is
, the elevation angle is
, and the noise variance is
. Thus, the received noise of the
mth element is obtained:
where the received noise from
is represented as
. Then, the noise covariance matrix in Equation (5) is obtained as:
where:
is defined as the phase difference.
We take one off-diagonal element of noise covariance matrix in Equation (14) to discuss:
where
. The phase difference can be simplified into:
where
,
, and
. For all noise sources, we can obtain
and
. Thus, the partial derivatives of
with respect to
and
are, respectively, given by:
where
. Therefore, setting the derivative in Equation (18) as zero, we obtain two sets of
and
, which correspond to the two extremes of the phase difference:
where
satisfies
by selecting a suitable
k.
When
, two values of
cause the phase difference to be the maximum and minimum. Moreover, according to Equation (17), we can obtain:
According to Equation (20), the maximum is the negative of the minimum, and the phase difference is continuous when and . Consequently, two noise sources, namely, and , whose variances are denoted as and , must be existed, and the phase differences satisfy the equation .
Then, the noise field generated by and can be decomposed into symmetrical and asymmetrical noise fields. The decomposition method is as follows: If , then the noise source is decomposed into two noise sources, namely, and , and the corresponding variances are equal to and , respectively. The noise sources and conform to Equation (9), so they generate the symmetrical noise field, whereas generates the asymmetrical noise field. and are arbitrary, so we can infer that the noise field generated by all G noise sources can be decomposed. The basic idea of the decomposition is that all noise sources that have equal phase differences, are equivalent to a noise source. Then, some equivalent noise sources are obtained. Finally, the noise field generated by these equivalent noise sources is decomposed into symmetrical and asymmetrical noise fields. The specific process is as follows:
- (1)
All noise sources can be divided into sets, which are denoted as . The principle of dividing the set is that the phase differences of all noise sources in the set are equal, denoted as . Therefore, the noise sources in the set of are equivalent to a noise source denoted as . Consequently, B equivalent noise sources are obtained.
- (2)
The phase differences of
conform to Equation (20). Consequently, for arbitrary
, another noise source must be existed, without losing generality, denoted as
, whose phase difference satisfies
. Consequently, the noise sources of
and
can be decomposed. Thus, the summation is calculated by:
is simplified into:
where
,
, and
,
are denoted as
and
, respectively. If
, then
; otherwise,
.
- (3)
For all
G noise sources, the off-diagonal element of the noise covariance matrix in Equation (16) is simplified into:
where
. Different
k and
l result in different
. Thus,
,
, and
change with
k and
l.
- (4)
All off-diagonal elements of the noise covariance matrix in Equation (14) can be analyzed by the same procedure.
Finally, Equation (23) shows that the symmetrical component affects the real part but not the imaginary part of the noise covariance matrix. Therefore, we can infer that most of the noise can be removed by using only the imaginary part of the covariance matrix in the array signal processing to improve the output SNR.
5. Simulation Experiment
For an
M-element UCA, the eigen wavelength
is generally defined as:
where
denotes the arc length between two adjacent elements and
denotes the eigen radius-to-wavelength ratio that corresponds to
.
When
and the radius is equal to 2 m,
, respectively. The change of the loss coefficient with the azimuth and elevation angles is shown in
Figure 2. The estimated capacity of the azimuth angle worsens and the loss coefficient is approximately equal to 1 when the elevation angle is in the area near 0° or 180°. However, this case is less common and make no sense. Apart from this area, the loss coefficient clearly reaches its second maximum when the elevation angle is near 90°. The elevation angle is selected as 90° in the following context of this section because the worst performance should be considered.
Next, the change of the loss coefficient with the azimuth angle when the elevation angle is selected as 90° is discussed in this paragraph. According to the characteristics of the UCA and Equation (31), the loss coefficient can vary regularly with the change of the azimuth angle.
M peaks and
M valleys exist for an
M-element UCA. When the target is located in the direction that corresponds to the valley, the loss coefficient is small, and the output signal intensity of the IDAS method is approximately equal to
, according to Equation (30). The peak value and width decrease with the increase of the number of elements. The peak values are 0.38, 0.28, 0.13, and 0.11 in
Figure 2a–d, the corresponding signal losses are 5.09, 4.44, 3.62, and 3.52 dB, respectively, according to Equation (30).
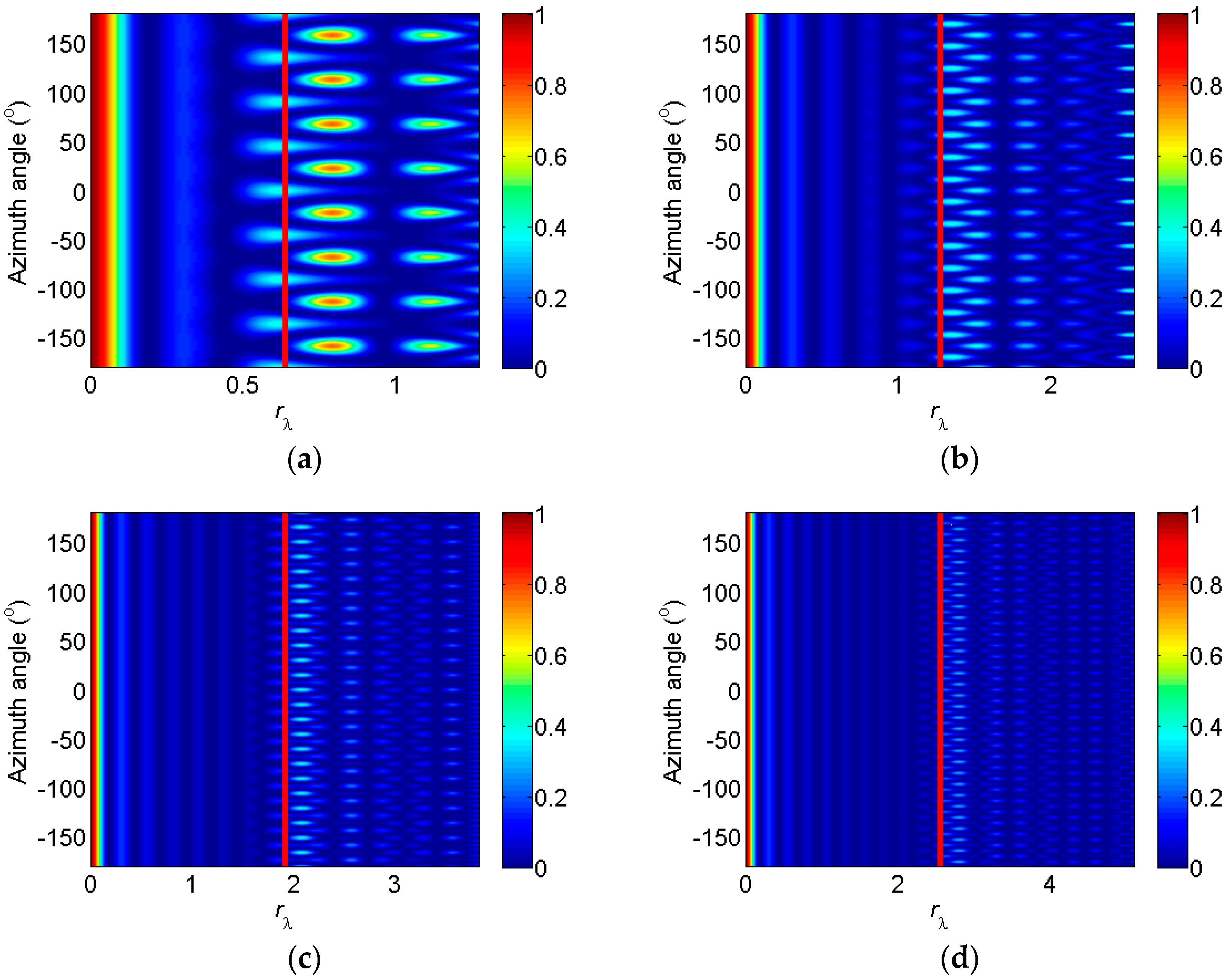
Then, the frequency characteristics of the loss coefficient are analyzed. The change of the loss coefficient with
and the azimuth angle is shown in
Figure 3, with the red lines representing
. From this figure, the loss coefficient is large when
is small, because the small
leads to the small exponent in Equation (31). Consequently, the IDAS method cannot be used and make no sense. Apart from the area of small
, the second maximum decreases with the increase of the number of elements, and the corresponding
is larger than
. Between the maximum and second maximum, the area where the loss coefficient is small, is called the feasible area of the IDAS method. The comparison of these four figures shows that the width of the feasible area increases with the increase of the number of elements.
According to
Figure 2 and
Figure 3, the signal loss can be predicated by selecting the number of elements, radius, and working frequency. Next, the noise removal capacity is analyzed, furthermore, the output SNR is obtained.
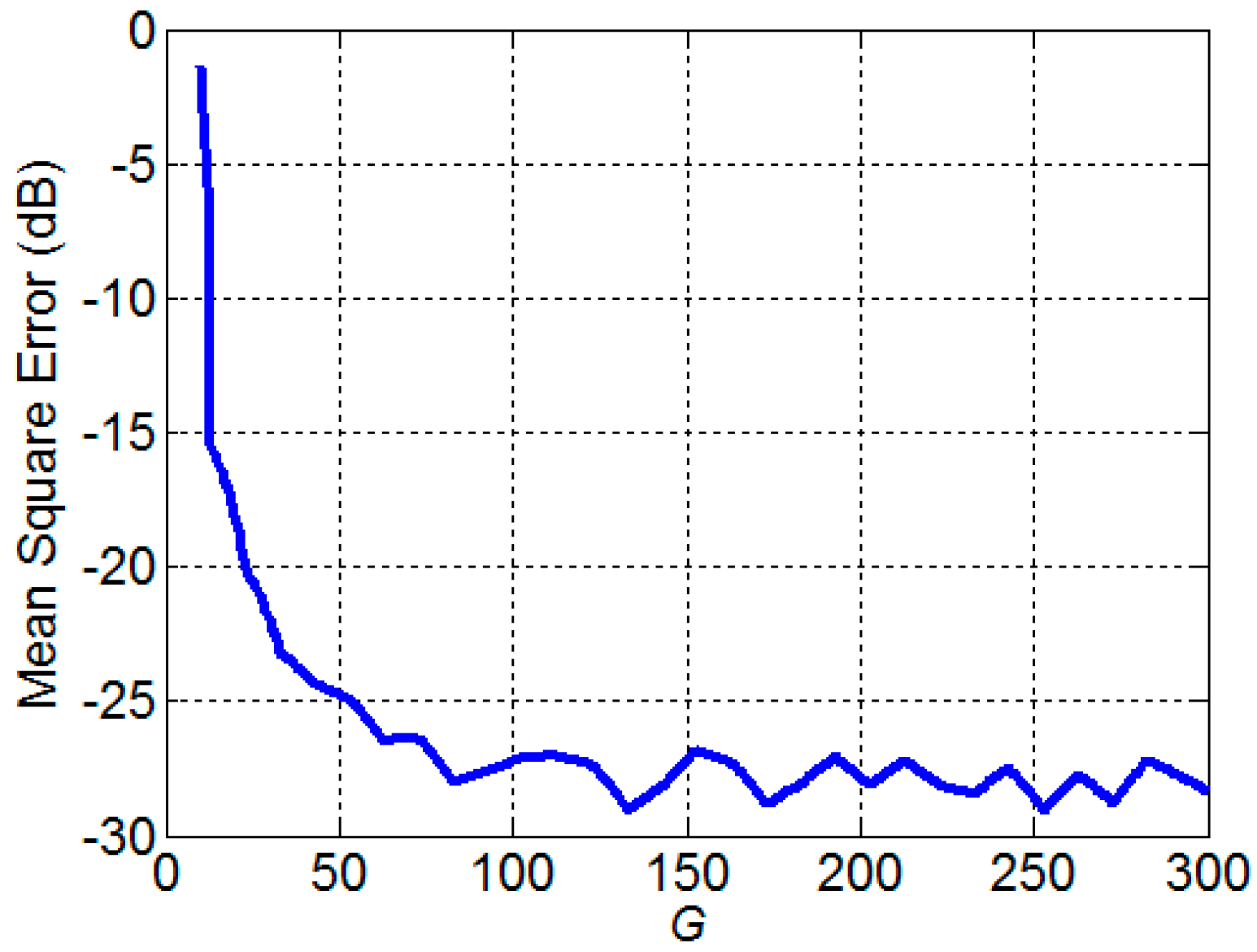
Firstly, the error between the noise modeled by a number of uncorrelated noise sources and the actual noise should be discussed. In this paper, the isotropic noise field is taken as an example. The well-known theoretical spatial coherence function for spherically isotropic noise and omnidirectional sensors is described as:
where
d is the distance of two sensors, and
is the wavelength. The error between the spatial coherence calculated from the noise model and the theoretical spatial coherence is defined by the normalized mean square error (MSE) between these two values [
25], that is:
where
K denotes the number of discrete frequencies and
denotes the estimated spatial coherence obtained by using
G noise sources. The result is shown in
Figure 4. For a large
G, the MSE asymptotically reaches a certain level. In case the number of noise sources is larger than 100, the theoretical spatial coherence is well approximated.
G is selected as 300 in the subsequent simulation experiments.
Then, a 24-element UCA is given, the radius is 2 m, the center frequency of the narrowband signal and noise is 2000 Hz, the bandwidth of signal is 50 Hz, the bandwidth of noise is 100 Hz, and the sampling frequency is 16 kHz. The SNR is defined as the variance ratio. The input SNR is assumed to be 0 dB, and the changes of the
and
with the azimuth angle are shown in
Figure 5. The
varies regularly with the change of the azimuth angle, which corresponds to the same law of loss coefficient. The comparison of the
with
shows that the maximum signal loss is 3.61 dB and the minimum signal loss is 3.03 dB.
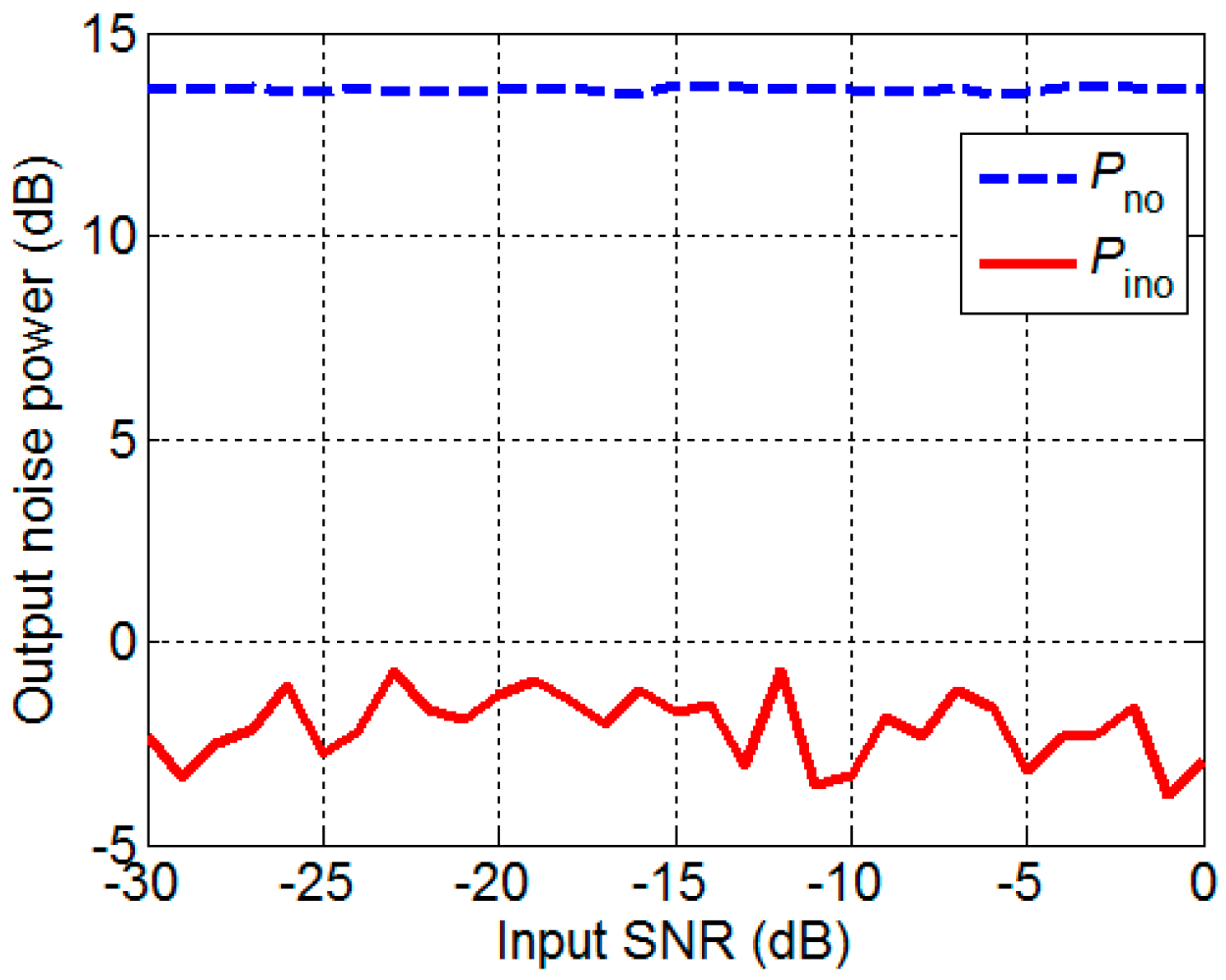
The azimuth angle is assumed to be 80°, and the changes of the
and
with the input SNR are shown in
Figure 6. Both
and
do not vary with the input SNR. The
is less than
by approximately 16 dB, which is a significant value. The isotropic noise field is simulated in this paper, such that the symmetrical component is large according to the definition of the symmetrical component. According to the principle of noise covariance matrix decomposition, the greater the symmetrical component is, the stronger the noise removal capacity is. Therefore, 16 dB is credible. According to
Figure 5 and
Figure 6, the output SNR is improved by using IDAS method.
Then, the
,
, and
should be analyzed because the performance of the RCMDAS method is based on these factors.
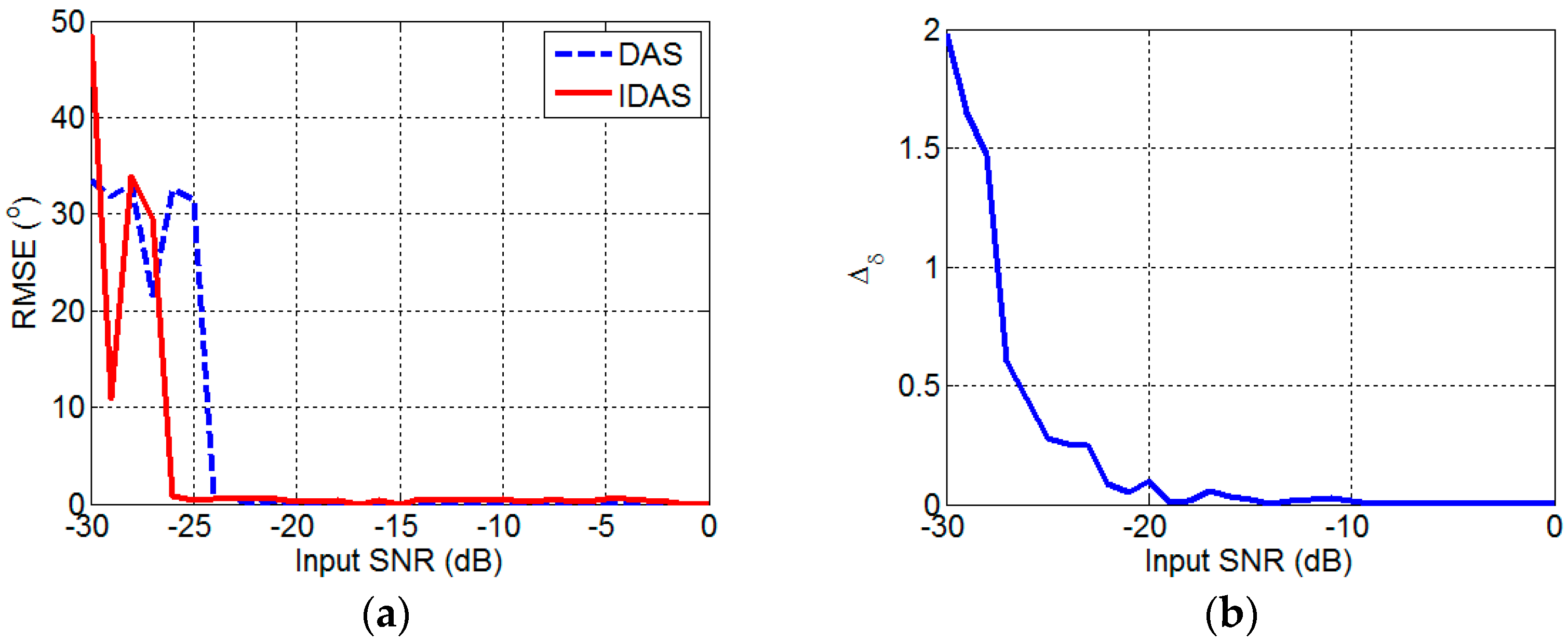
Figure 7a presents the change of the sum of the
and
RMSEs with the input SNR. When the input SNR is large, the RMSEs of the DAS and IDAS methods are small. The RMSE of the DAS method increases, whereas that of the IDAS method varies only slightly with the decrease of the input SNR. As the input SNR continues to decrease, the RMSEs of both methods are large. This result reveals that the IDAS method provides much better performance in direction of arrival estimation than DAS method.
Figure 7b presents the change of
with the input SNR.
decreases with the increase of the input SNR. This result reveals that the performance of SVE-RCMDAS method becomes better. According to Equation (37), the
and
RMSEs affect the
. However, according to Equation (41), the
affects the reconstructed real part matrix, which will affect the output intensity of the SVE-RCMDAS. According to Equation (49), the
and
RMSEs influence the result of the CP-RCMDAS method. As a result, the small
and
RMSEs and the small
provide the basis for the application of the RCMDAS method.
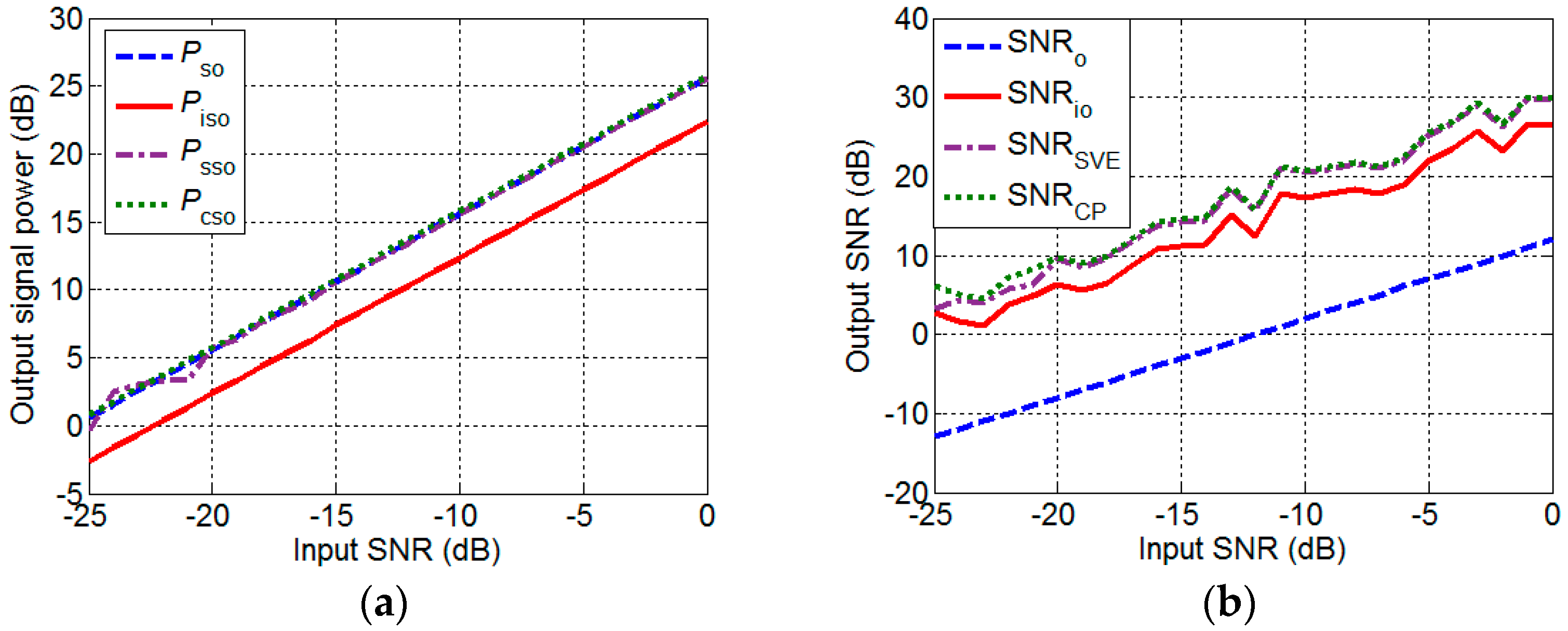
Figure 8a presents the changes of the
,
,
, and
with the input SNR. The
and
are approximately equal to that of the DAS method, and the output signal intensity of the IDAS method is smaller by 3.2 dB than those of the other three methods. When the input SNR is low, the output of the SVE-RCMDAS method appears perturbations because the low input SNR leads to significant error of the estimated signal variance. This case does not exist in the curve of the CP-RCMDAS method. According to
Figure 6 and
Figure 8a, the changes of the output SNRs of the DAS (
), IDAS (
), SVE-RCMDAS (
), and CP-RCMDAS (
) methods with input SNR can be obtained, as shown in
Figure 8b. The output SNR of the DAS method is the smallest, that of the IDAS method comes second, and those of the RCMDAS methods are the largest.
6. Experimental Results
An experimental 16-hydrophone UCA is used in the South China Sea with two sea conditions, in which the radius is 1.5 m and the sampling frequency is 25 kHz. The sea depth of the experimental point is 2000 m, and the UCA is deployed in a depth of 300 m. The launch device is a fish lip transducer that is deployed in a depth of 50 m. The horizontal distance between the launch devices with the UCA is 600 m.
The emission signal is a chirp signal with a center frequency of 950 Hz and bandwidth of 500 Hz, the time length of the chirp signal is 1.5 s and the cycle is 2 s.
Figure 9 shows the direction spectra of the DAS, IDAS, SVE-RCMDAS, and CP-RCMDAS methods when the data with 2 s is used. We can find that there exist the up-down ambiguity, because the directive map of the DAS method for the UCA exists the up-down ambiguity. The output of the DAS method is presented in
Figure 9a and that of the IDAS method is exhibited in
Figure 9b. The elevation angles of the direct wave and the surface-bounce wave are close to each other and the multi-target resolution of the DAS method is restricted by Rayleigh limit, therefore, we cannot distinguish the direct wave and the surface-bounce wave from the
Figure 9a. When (a) is compared with (b), the output of the DAS method in the direction of the actual target is larger than that of the IDAS method. Furthermore, the output of the IDAS method in the direction of the false target is approximately equal to that of the actual target, and the difference between the azimuth angles of the actual target and the false target is approximately equal to 180°. As a result, the azimuth angle of the actual target is difficult to distinguish. Apart from the directions of the actual and false targets, the outputs in the other directions are considered the approximation of the output noise intensity. Notably, the approximate output noise intensity of the IDAS method is less than that of the DAS method by more than 6.4 dB. The output of the SVE-RCMDAS method is presented in
Figure 9c. When (c) is compared with (b), the false target is almost eliminated and the output in the direction of the actual target increases. When (c) is compared with (a), the approximate output noise intensity of the SVE-RCMDAS method is less than that of the DAS method, and the output of the RCMDAS method in the direction of the actual target is approximately equal to that of the DAS method, which reveals that the noise is removed and the signal is distortionless. The output of the CP-RCMDAS method is presented in
Figure 9d. When (d) is compared with (c), the CP-RCMDAS method exhibits all advantages of the SVE-RCMDAS method. Moreover, the false target is eliminated more thoroughly by using the CP-RCMDAS method.
The output SNR is calculated by using the approximation method. First, the sums of the output noise intensity and output signal intensity are obtained from the data with signal. Second, with the use of the weighted vector of the previous step, the output noises of the DAS and IDAS methods are calculated from the data without signal, and the output noises of the two RCMDAS methods are assumed to be the same as those of the IDAS method. Finally, the output SNR is listed in
Table 1.
From
Table 1, the following preliminary conclusions are drawn: (1) The output SNR of the IDAS method is larger than that of the DAS method by 2.15 dB, which is a comprehensive result of the signal loss and noise removal. (2) The output SNR of the IDAS method is smaller than that of the SVE-RCMDAS and CP-RCMDAS methods by 3.514 and 3.781 dB, respectively, which is the result of the addition of the reconstructed real part of signal covariance matrix.
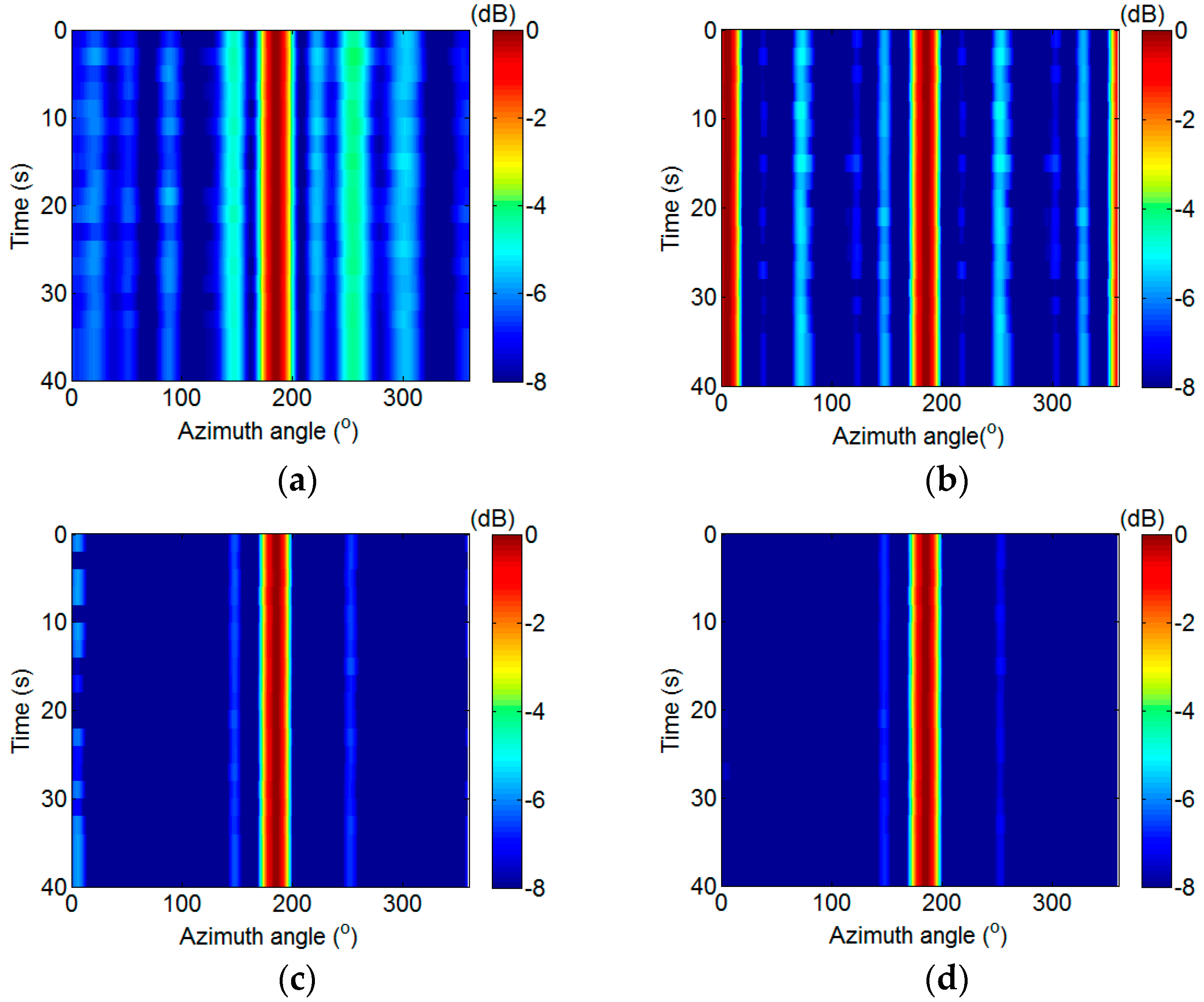
The data with 40 s is used in the DAS, IDAS, SVE-RCMDAS, and CP-RCMDAS methods. The corresponding bearing time record (BTR) figures, when the elevation angle is equal to 68° according to
Figure 9, are shown in
Figure 10a–d.
The normalized side lobe level of BTR (BSLL) is defined as:
where
and
denote the discrete time and azimuth angle, respectively;
and
represent the sampling number of time and azimuth angle, respectively; and
denotes the normalized output.
Figure 10a presents the BTR figure of the DAS method. A target whose azimuth angle is 185° and BSLL is −5.02 dB can be detected.
Figure 10b presents the BTR figure of the IDAS method. The false target appears and the BSLL, which is equal to −7.84 dB, is smaller than that of the DAS method.
Figure 10c,d present the BTR figures of the SVE-RCMDAS and CP-RCMDAS methods, respectively. The false target is eliminated, and the BSLL of the CP-RCMDAS method, which is equal to −10.18 dB, is smaller than that of the SVE-RCMDAS method, which is equal to −9.31 dB.
In summary, the SVE-RCMDAS method performs worse than the CP-RCMDAS method in terms of the output SNR and the BSLL. However, the SVE-RCMDAS method performs better than the CP-RCMDAS method in terms of computing time, as shown in
Table 2.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}