Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks



Abstract
:1. Introduction
- (1)
- The node types of an UWSN include master node, sensor node and mobile node. The master node is a vessel used for data processing. Sensor nodes are different kinds of stationary and submerged floating sensors deployed underwater. Mobile nodes are underwater unmanned vehicles, such as unmanned underwater vehicles (UUVs) and autonomous underwater vehicles (AUVs).
- (2)
- In the beginning, sensor nodes are deployed randomly on the sea surface. When working, they can float on the ocean or be suspended in the ocean at certain depth. Sensor nodes are fixed in the water by anchoring. However, they can move in the vertical direction by changing their buoyancy, and slightly move back and forth horizontally with ocean current.
- (3)
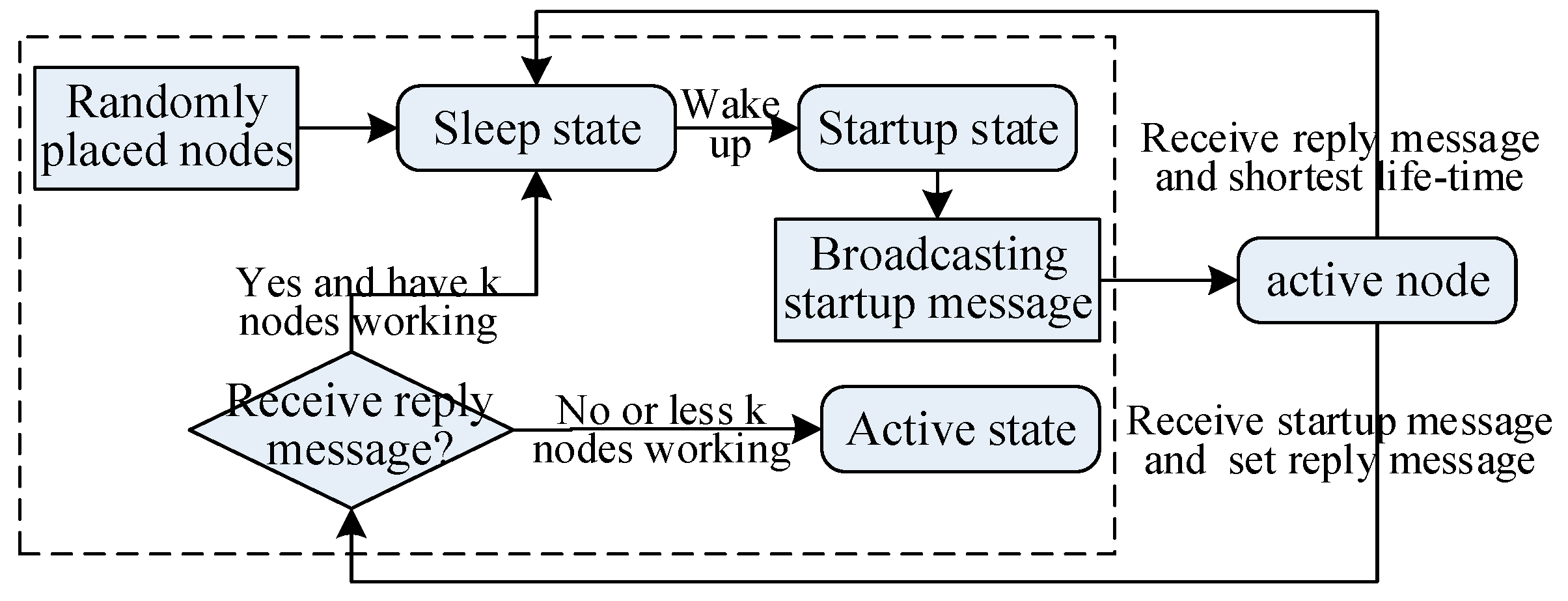
- The detection range of sensor nodes is a uniform ball-body [6]. They can only detect the targets precisely within the range, but cannot detect the targets outside of it. Sensor nodes have three states: active state, startup state and sleep state.
- (4)
- The mobile nodes, mainly UUVs and AUVs carrying some sensors nodes, can redeploy and reconfigure their sensor nodes, and have the functions of resource exploration and environmental monitoring. Master nodes deploy sensor nodes and control the network.
- (1)
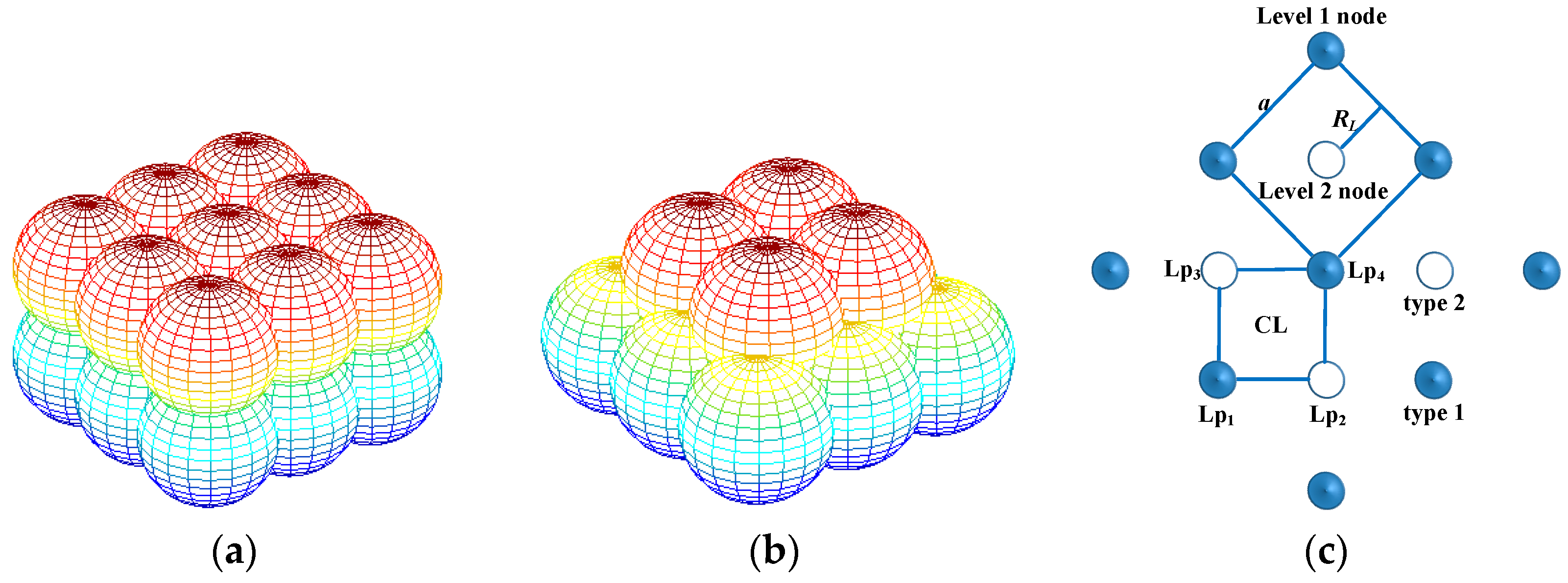
- We improve the normal body-centered cubic lattice (NBCL) [6] to cross body-centered cubic lattice (CBCL) for the deployment of UWSNs, and propose a Cross Deployment Networking Method (CDNM) for UWSNs suitable for the underwater environment. In the former NBCL, the body-centered cubic lattices structure is piled up layer by layer by regular ball-bodies. After improvement to the CBCL, the ball-bodies on the higher level are crossing stacked over the spaces between ball-bodies on the next layer, and the cubic space has been divided into hierarchies and monitored from top to bottom. Based on CBCL, a 3D UWSN deployment process and topology generation method are proposed. Then, based on CBCL and randomly deploy sensor nodes, a K-Connected K-Dominating Set (K-CDS) [7] is built as the virtual communication backbone, and a Cross Deployment Networking Method (CDNM) for UWSNs, suitable for the underwater environment, is further proposed.
- (2)
- A Systematic Quar-Performance Calculation Model (SQPCM) is proposed. Considering the requirements of ocean exploration and underwater monitoring missions, we analyze the relationships between systematic network performance and the influencing parameters from an integrated view, and divide the systematic performance of UWSNs into four items, including coverage, connectivity, durability and rapid-reactivity. At the same time, we summarize the influencing parameters impacting the systematic performance items into three categories: constraint parameters, device performance parameters and networking parameters. Furthermore, the measurement models of coverage, connectivity, durability and rapid-reactivity performance are established. Then the network performance is evaluated and calculated systematically.
- (3)
- In order to make UWSN have the adaptivity to adjust the network coverage, connectivity and effective run-time when the environment and mission change, a Networking Parameters Adjustment Method (NPAM) for optimized systematic performance of UWSNs is presented. The process of this method is composed of four parts, including state collection and detection, dynamic measurement model of an UWSN’s performance, optimal adjustment model of the UWSN and optimal method based on genetic algorithm. Through this method, an optimal combination of networking parameters can be achieved. As a result, it is possible for the network to have the maximum systematic performance in different missions and environment.
- (4)
- Two simulation experiments have been carried out in this study, whose result demonstrates that the proposed approach is highly feasibility and efficient in UWSN networking and performance calculation.
2. Related Works
- (1)
- The correlation between the network systematic performance and the three kinds of parameters from an integrated perspective, that is, constraint parameters, device performance parameters as well as networking parameters, is an important research domain for UWSNs. In previous works, this topic has barely been discussed, with a few papers published.
- (2)
- Currently there is a lack of systematic research on UWSN performance calculation and evaluation. Many researchers have analyzed the performance from the coverage, connectivity, reliability and energy efficiency perspectives separately to support their study of topics in such fields as network architecture, routing protocols and communication technology.
- (3)
- There is no self-adaptive ability in networking, parameter adjustment and performance optimization of UWSNs. Many researchers have focused on network deployment, localization and self-adaptive energy management policy [13]. The networking parameters cannot be processed systematically after the UWSN is built.
3. Cross Deployment Networking Method
3.1. UWSN Deployment Process Based on Improved Body-Centered Cubic Lattice
- Step 1.
- Place the sensor node randomly on the ocean surface. After anchoring, it calculates the ID of the unit it belongs to according to its coordinates (obtained by GPS) and the pre-designated reference points, then enters into sleep state. The sleep time of nodes obeys the index distribution [7], and the probability density function is , where λ is the startup speed; ts is the sleep interval. The original value of parameter λ determines the interval in which the network wakes up enough nodes during the deployment phase.
- Step 2.
- The node enters into startup state after awakening. The node broadcast startup messages within Rp radius, which contains its own unit ID. To send the startup message to any nodes in the same cell, the Rp should be set to satisfy the condition that Rp ≥ 2RCL.
- Step 3.
- For any active node which receives startup messages, if it belongs to the same unit as the starter node does, it sends a reply message which contains information of the layer where the sensor node is. Otherwise, it ignores the startup message.
- Step 4.
- If the starter node does not receive any reply message within a certain interval, the sensor nodes will move to any layer of underwater monitored space from the surface and enter into active state. While the starter node receives the reply message, it first determines the number of active sensor nodes in this cell, and if there are k sensor nodes in active state in every layer, the sensor nodes go back into the sleep state. Otherwise, the sensor nodes move to a layer with less active nodes and enter active state.
- Step 5.
- When the active nodes responds to the reply message from the neighbor node, they compare with the nodes with least work time in replying to the message only when there are k working nodes on the layer the node is in. It enters into the sleep state if its work time is shorter.
3.2. Cross Deployment Networking Method
| Algorithm 1: CDNM |
| 1: Initial network nodes set NNS = all node, virtual communication backbone nodes set VCB_set = Ø, no virtual communication backbone nodes set NVCB_set = Ø and setup the initial value of pk; Random select Ni from NNS as initial node of virtual communication backbone; Put Ni into VCB_set; |
| 2: For(j == 0; j <= the node number of NNS; j++) |
| 3: Random select Nk from other nodes in pk probability |
| 4: If(Nk is not a member of VCB_set and Nk + VCB_set meeting K-CDS) |
| 5: Put Nk into VCB_set; |
| 6: else |
| 7: Put Nk into NVCB_set; |
| 8: end if; |
| 9: end for; |
| 10: create routing protocol on OSPF; |
| 11: end. |
4. Systematic Performances Analysis of UWSNs
4.1. The Systematic Performance Items Analysis
- (1)
- Coverage. This is the effective monitoring scope as a network system, including the precision of detection within the monitored space. The stronger the coverage, the wider the network’s coverage, and any place within the range will have more nodes working simultaneously within the underwater space.
- (2)
- Connectivity. This includes the degree of connection and data transmission capacity provided by the network. Stronger connectivity provides more end-to-end transmission paths and higher data transmission bandwidth and reliability.
- (3)
- Durability. This is the run time duration of the network. Stronger durability ensures that the network can provide a longer exploration and monitoring service.
- (4)
- Rapid-reactivity. This refers to the capacity to recover to normal network mode when a node is added to the network, fails in the network or the network mode is switched. Stronger rapid-reactivity represents a stronger ability to cope with dynamic changes when one node is added or exits, and when there is need to change the working mode.
4.2. Systematic Quar-Performance Calculation Model of UWSN
4.2.1. Measurement Formula of Coverage
4.2.2. Measurement Formula of Connectivity
4.2.3. Measurement Formula of Durability
4.2.4. Measurement Formula of Rapid-Reactivity
4.3. Map Relationship Between Systematic Performance Items and Influence Parameters
5. Networking Parameter Adjustment Method for Optimized Systematic Performance
5.1. UWSN State Collection
5.2. Systematic Performance Calculation of UWSN’s
5.3. The Process of the Networking Parameters Adjustment Method
5.4. Optimization Method Based on a Genetic Algorithm
- (a) When the two individuals A and B are feasible, the individual with a larger fitness value is regarded as optimum by comparing the values f(A) and f(B).
- (b) When the two individual A and B are unfeasible, the individual with a smaller unfitness value is regarded as optimum by comparing the values obj(A) and obj(B).
- (c) When individual A is feasible but B is not, if obj(B) ≤ ε, the individual with a larger fitness value is regarded as optimum by comparing the values f(A) and f(B). Otherwise, A is regarded as a better individual.
6. Simulation Experiment
6.1. Simulation Experiment on Networking and Systematic Performance Calculation of UWSNs
6.2. Simulation Experiment on NPAM of UWSNs
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guo, Z.W.; Luo, H.J.; Hong, F.; Yang, M.; Ni, L.M. Current progress and research issues in underwater sensor networks. J. Comput. Res. Dev. 2010, 47, 377–389. [Google Scholar]
- Yu, W.; Liu, Y.; Guo, Z. Three-dimensional ocean sensor networks: A survey. J. Ocean Univ. China 2012, 11, 436–450. [Google Scholar]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. A survey on routing techniques in underwater wireless sensor networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Chen, Y.S.; Lin, Y.W. Mobicast routing protocol for underwater sensor networks. IEEE Sens. 2013, 13, 737–749. [Google Scholar] [CrossRef]
- Abbas, W.B.; Ahmed, N.; Usama, C.; Syed, A.A. Design and evaluation of a low-cost, diy-inspired, underwater platform to promote experimental research in uwsn. Ad Hoc Netw. 2015, 34, 239–251. [Google Scholar] [CrossRef]
- Liu, H.F.; Jin, S.Y. 3D sensor network deployment and organization based on body-centered cubic lattices. Comput. Eng. Sci. 2008, 30, 109–112. [Google Scholar]
- Zheng, C.; Sun, S.X.; Huang, T.Y. Constructing distributed connected dominating sets in wireless ad hoc and sensor networks. J. Softw. 2011, 22, 1053–1066. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Heidemann, J.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. 2012, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Lloret, J. Underwater sensor nodes and networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Alam, S.M.N.; Haas, Z.J. Coverage and connectivity in three-dimensional underwater sensor networks. Ad Hoc Netw. 2006, 34, 157–169. [Google Scholar] [CrossRef]
- Ahmadi, A.; Shojafar, M.; Hajeforosh, S.F.; Dehghan, M.; Singhal, M. An efficient routing algorithm to preserve k-coverage in wireless sensor networks. J. Supercomput. 2014, 68, 599–623. [Google Scholar] [CrossRef]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater wireless ad-hoc networks: a survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press Inc.: Boca Raton, FL, USA, 2011; Chapter 14; pp. 379–411. [Google Scholar]
- Naranjo, P.G.V.; Shojafar, M.; Mostafaei, H.; Pooranian, Z.; Baccarelli, E. P-SEP: A prolong stable election routing algorithm for energy-limited heterogeneous fog-supported wireless sensor networks. J. Supercomput. 2016, 73, 733–755. [Google Scholar] [CrossRef]
- Lloret, J.; Garcia, M.; Sendra, S.; Lloret, G. An underwater wireless group-based sensor network for marine fish farms sustainability monitoring. Telecommun. Syst. 2015, 60, 67–84. [Google Scholar] [CrossRef]
- Dhurandher, S.K.; Obaidat, M.S.; Gupta, M. An efficient technique for geocast region holes in underwater sensor networks and its performance evaluation. Simul. Model. Pract. Theory 2011, 19, 2102–2116. [Google Scholar] [CrossRef]
- Dhurandher, S.K.; Obaidat, M.S.; Gupta, M. Providing reliable and link stability-based geocasting model in underwater environment. Int. J. Commun. Syst. 2012, 25, 356–375. [Google Scholar] [CrossRef]
- Dhurandher, S.K.; Gupta, M. Link stability based geocasting model for underwater sensor networks. In Proceedings of the International Conference and Workshop on Emerging Trends in Technology, Mumbai, Maharashtra, India, 26 February 2010. [Google Scholar]
- Stefanov, A.; Stojanovic, M. Design and performance analysis of underwater acoustic networks. IEEE J. Sel. Areas Commun. 2011, 29, 2012–2021. [Google Scholar] [CrossRef]
- Yu, H.; Yao, N.; Cai, S. Analyzing the performance of aloha in string multi-hop underwater acoustic sensor networks. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 65. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Kim, D.; Lim, K.S. MRP: A localization-free multi-layered routing protocol for underwater wireless sensor networks. Wirel. Pers. Commun. 2014, 77, 2997–3012. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. A novel void node recovery paradigm for long-term underwater sensor networks. Ad Hoc Netw. 2015, 34, 144–156. [Google Scholar] [CrossRef]
- Jha, D.K.; Wettergren, T.A.; Ray, A.; Mukherjee, K. Topology optimisation for energy management in underwater sensor networks. Int. J. Control. 2015, 88, 1–14. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, J.; Wu, F. Node non-uniform deployment based on clustering algorithm for underwater sensor networks. Sensors 2015, 15, 29997–30010. [Google Scholar] [CrossRef] [PubMed]
- Nie, J.; Li, D.; Han, Y. Optimization of multiple gateway deployment for underwater acoustic sensor networks. Comput. Sci. Inf. Syst. 2011, 8, 1073–1095. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, S.; Liu, J.; Wu, F.; Zhang, L. A depth-adjustment deployment algorithm based on two-dimensional convex hull and spanning tree for underwater wireless sensor networks. Sensors 2016, 16, 1087. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.W.; Cho, H.S. SOUNET: Self-organized underwater wireless network. Sensors 2017, 17, 283. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Node Parameters | Label | Master and Mobile Node Parameters | Label |
|---|---|---|---|
| underwater communication radius | rb | mobile node velocity | vu |
| underwater communication bandwidth | bb | mobile node underwater communication bandwidth | bu |
| overwater communication bandwidth | b’b | mobile node detected radius | du |
| detected radius | db | mobile node detected precision | hu |
| detected precision | hb | mobile node number | nu |
| number | nb | mobile node total energy | eu |
| total energy | eb | mobile node energy consumption | pu |
| average energy consumption | pb | master node velocity | vs |
| average connectivity | kb | master node underwater communication bandwidth | bs |
| average coverage | cb | master node number | ns |
| Systematic Performance | Constraint Parameters | Device Performance Parameters | Networking Parameters |
|---|---|---|---|
| Coverage | α, β, γ | hb, nu, du,hu | db, nb, cb |
| Connectivity | α, ω, β | vs, ns, bs, bb, bb’, bu, vu, nu | kb |
| Durability | α, β, m | eu, eb, pu | pb |
| Rapid-reactivity | α, s, l | bb | rb, kb, cb |
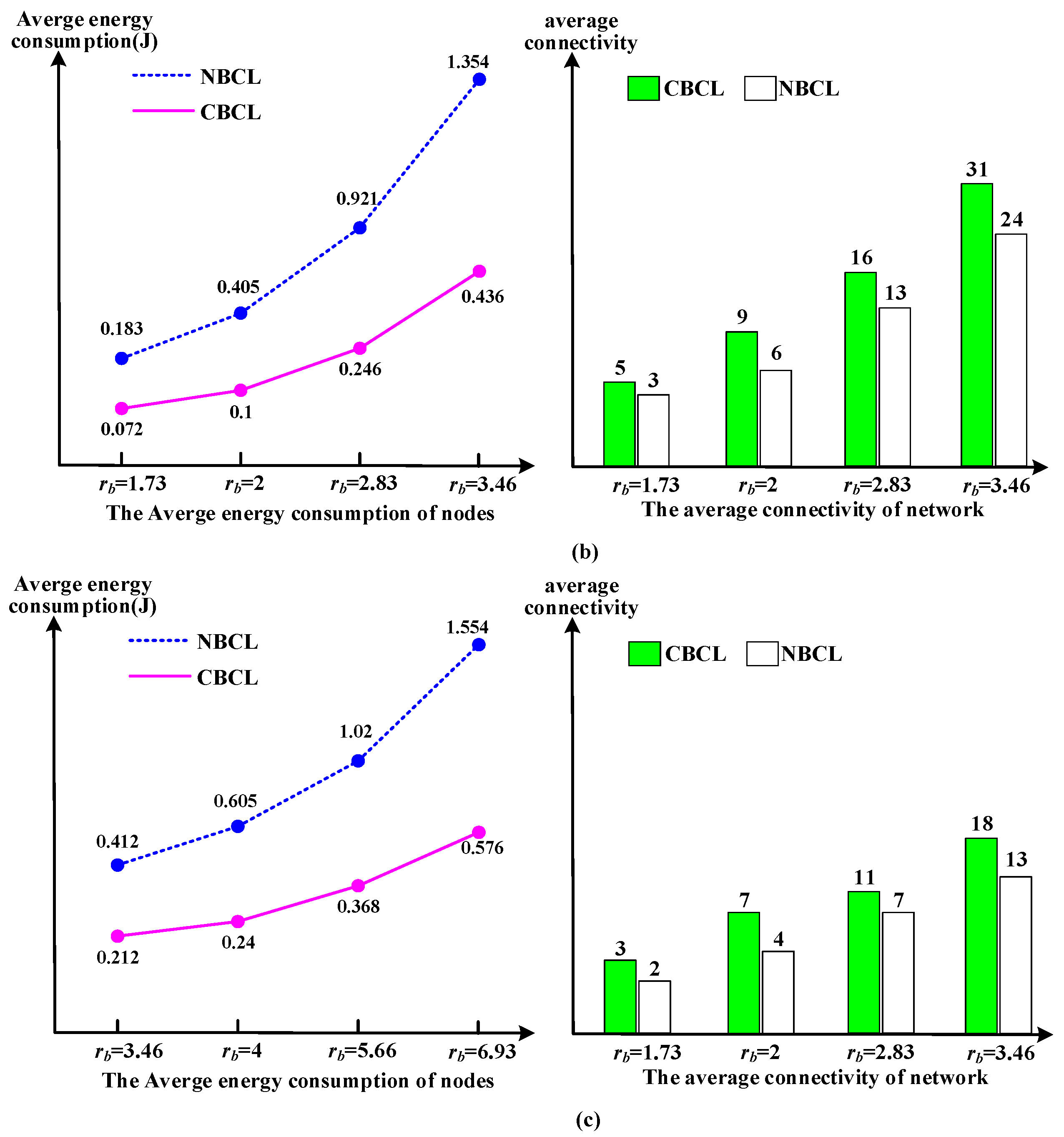
| rb = 3.46 | rb = 4 | rb = 5.66 | rb = 6.93 | |
|---|---|---|---|---|
| NBCL | 1011.46 h ≈ 42 days | 872.74 h ≈ 36 days | 755.66 h ≈ 31 days | 688.73 h ≈ 29 days |
| CBCL | 1585.44 h ≈ 66 days | 1129.4 h ≈ 51 days | 1076.16 h ≈ 45 days | 946.85 h ≈ 39.5 days |
| Item | Our work | Work [19] | Work [20] | Work [21] | Work [22] | Work [26] | Work [27] |
|---|---|---|---|---|---|---|---|
| Coverage | √ | √ | √ | -- | -- | √ | -- |
| Connectivity | √ | √ | -- | -- | -- | √ | √ |
| Durability | √ | -- | -- | √ | √ | -- | √ |
| Rapid-reactivity | √ | -- | √ | √ | √ | -- | √ |
| nb | pb | db | cb | kb | rb | |
|---|---|---|---|---|---|---|
| First round | 219 | 0.088974 | 1000 | 1.1237 | 7.559 | 1903.5 |
| Second round | 219 | 0.099964 | 1000 | 1.1418 | 7.5763 | 2000.8 |
| Final state | 219 | 0.1 | 1000 | 1 | 9 | 2000 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Z.; Song, M.; Yin, G.; Wang, H.; Ma, X.; Song, H. Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks. Sensors 2017, 17, 1619. https://doi.org/10.3390/s17071619
Wei Z, Song M, Yin G, Wang H, Ma X, Song H. Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks. Sensors. 2017; 17(7):1619. https://doi.org/10.3390/s17071619
Chicago/Turabian StyleWei, Zhengxian, Min Song, Guisheng Yin, Hongbin Wang, Xuefei Ma, and Houbing Song. 2017. "Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks" Sensors 17, no. 7: 1619. https://doi.org/10.3390/s17071619
APA StyleWei, Z., Song, M., Yin, G., Wang, H., Ma, X., & Song, H. (2017). Cross Deployment Networking and Systematic Performance Analysis of Underwater Wireless Sensor Networks. Sensors, 17(7), 1619. https://doi.org/10.3390/s17071619