A Smartphone-Based Automatic Measurement Method for Colorimetric pH Detection Using a Color Adaptation Algorithm


Abstract
:1. Introduction
2. Materials and Methods
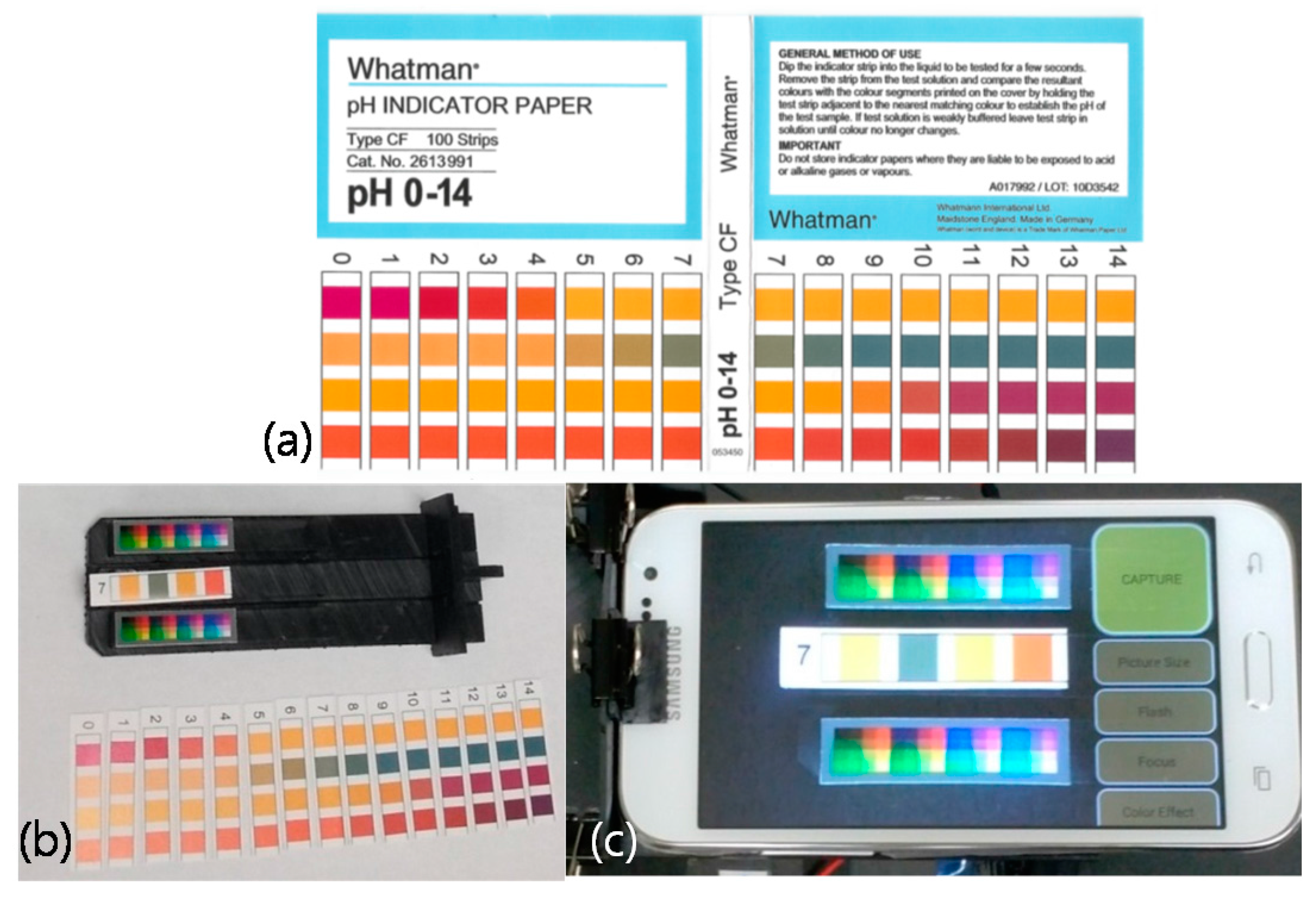
2.1. Materials
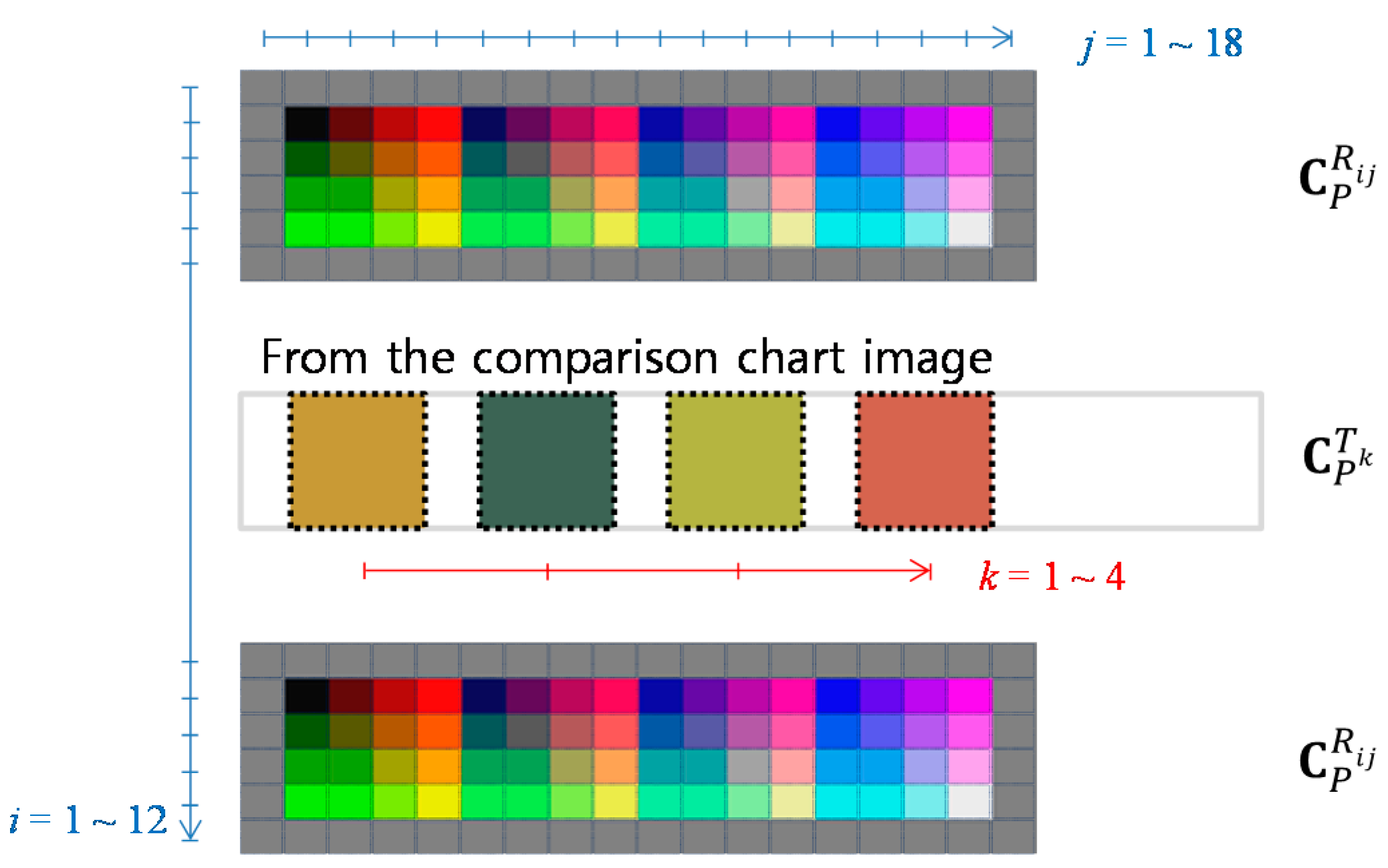
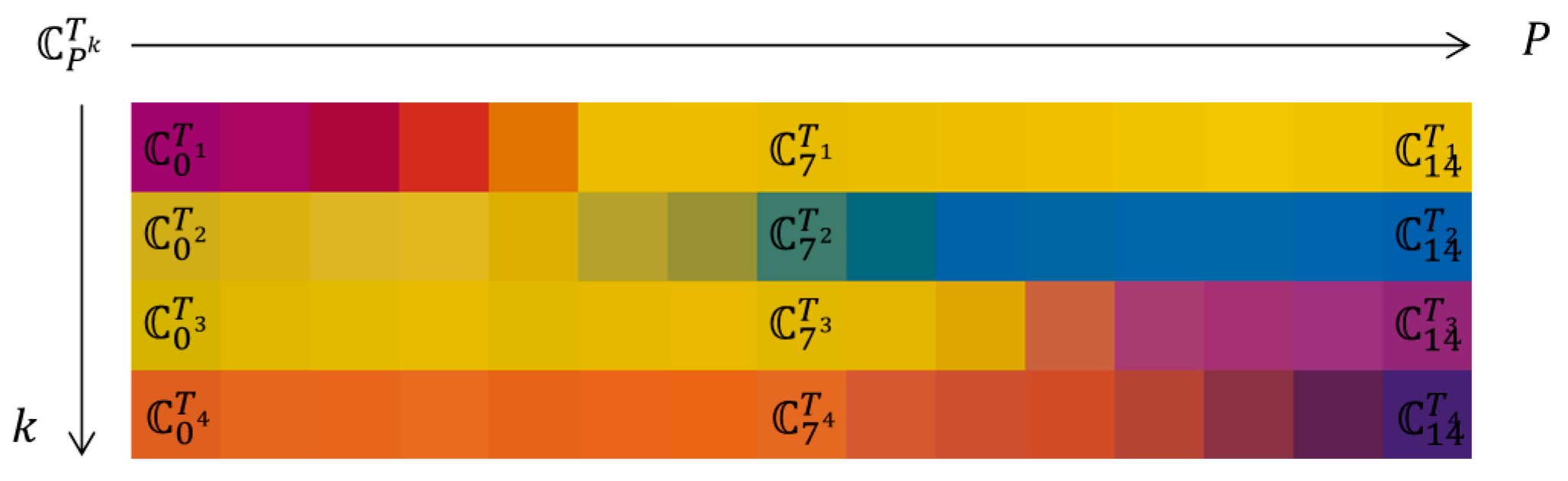
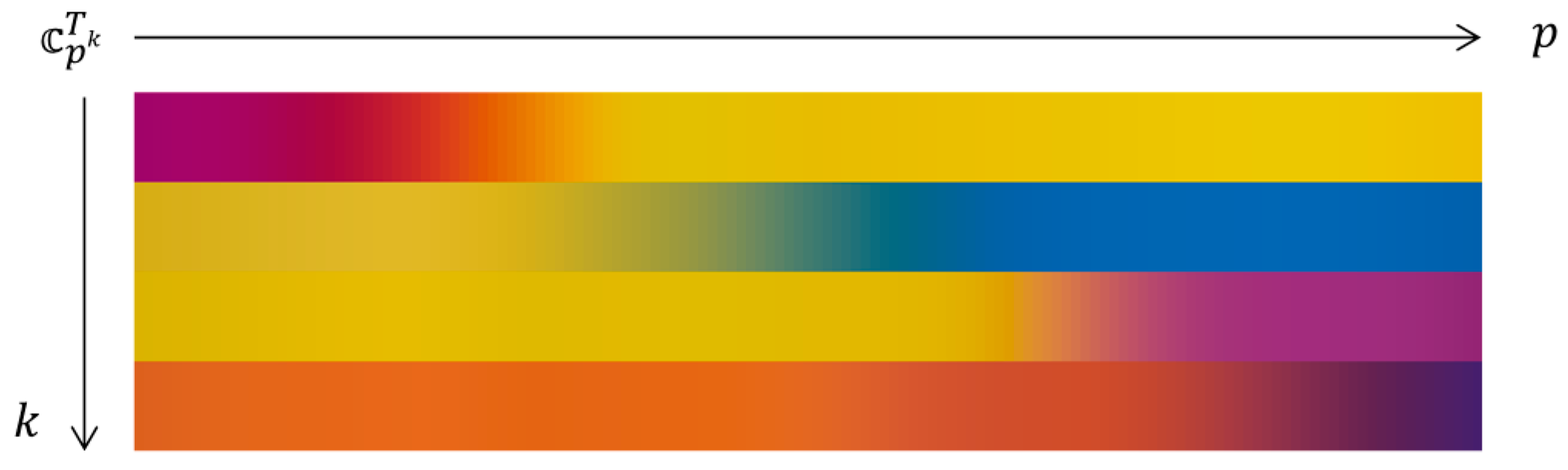
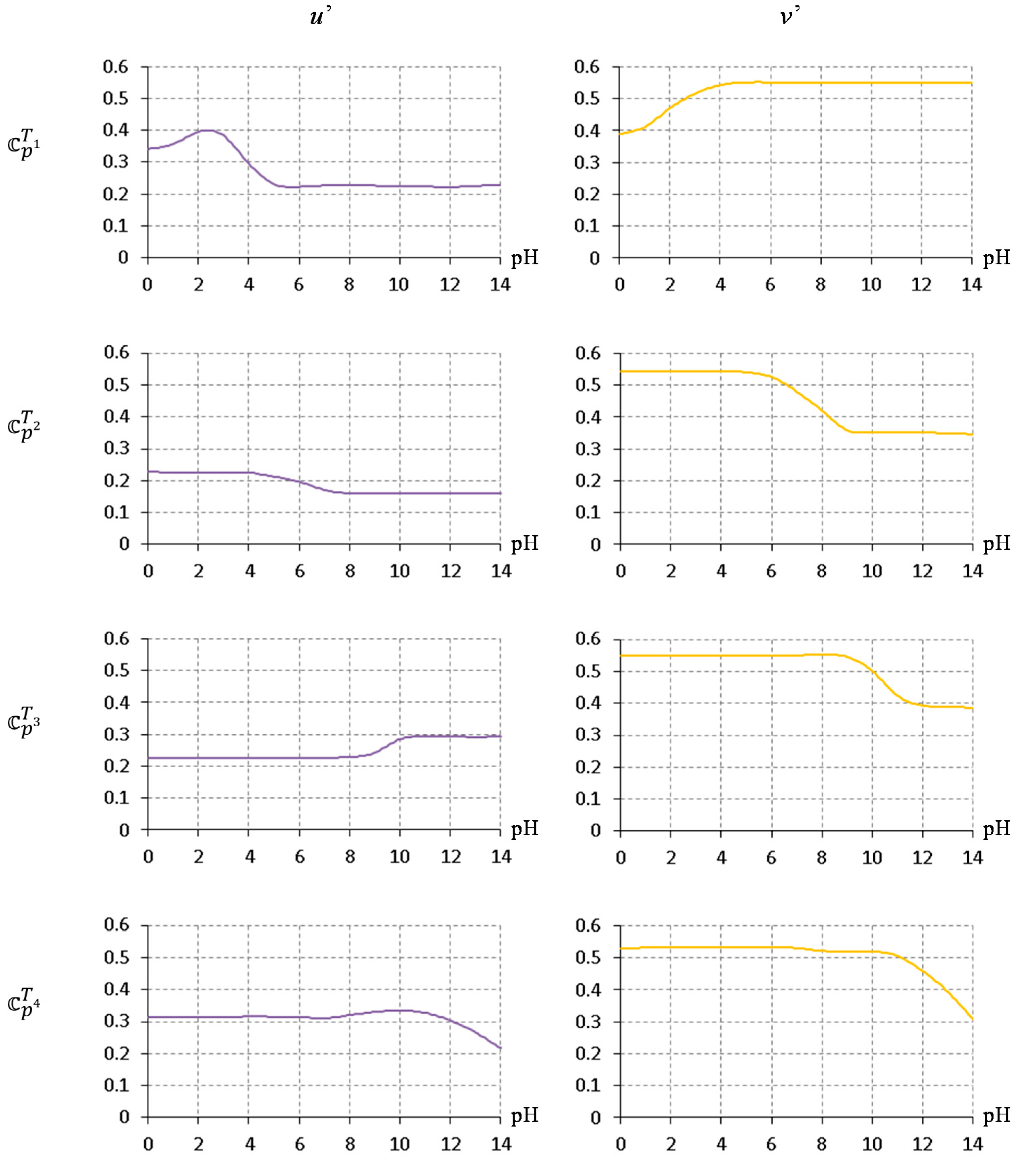
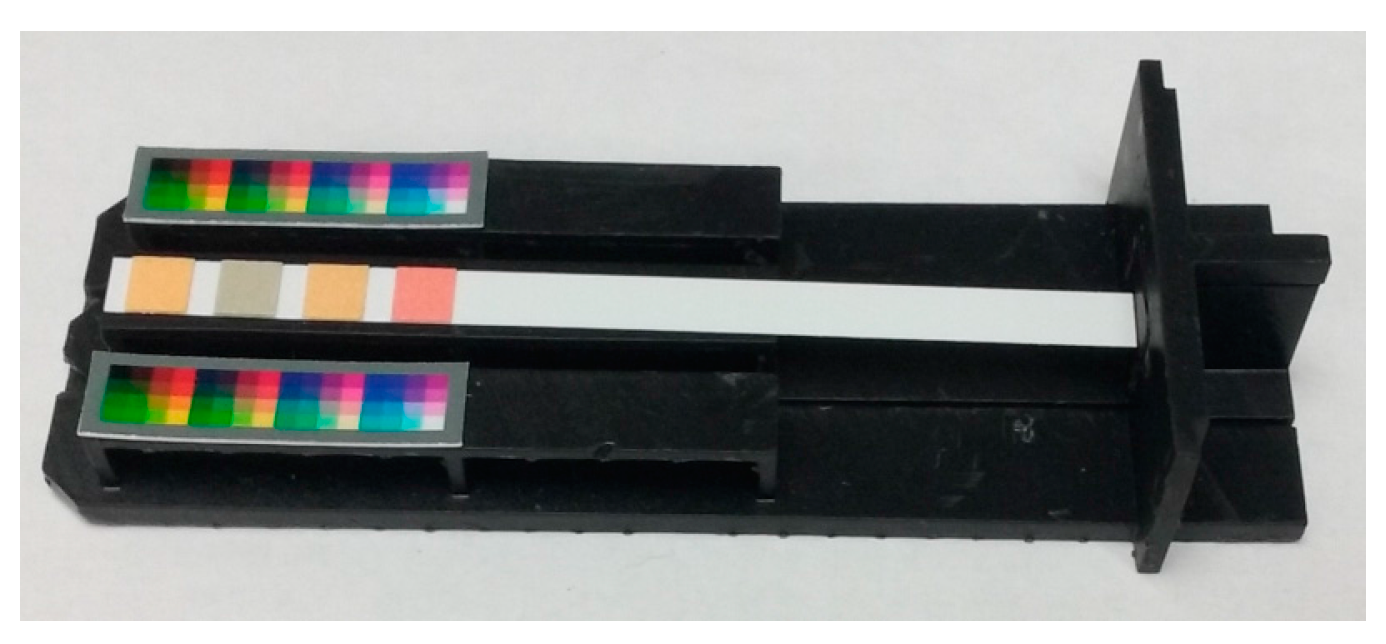
2.2. Calibration Step Using a Paper-Printed Comparison Chart
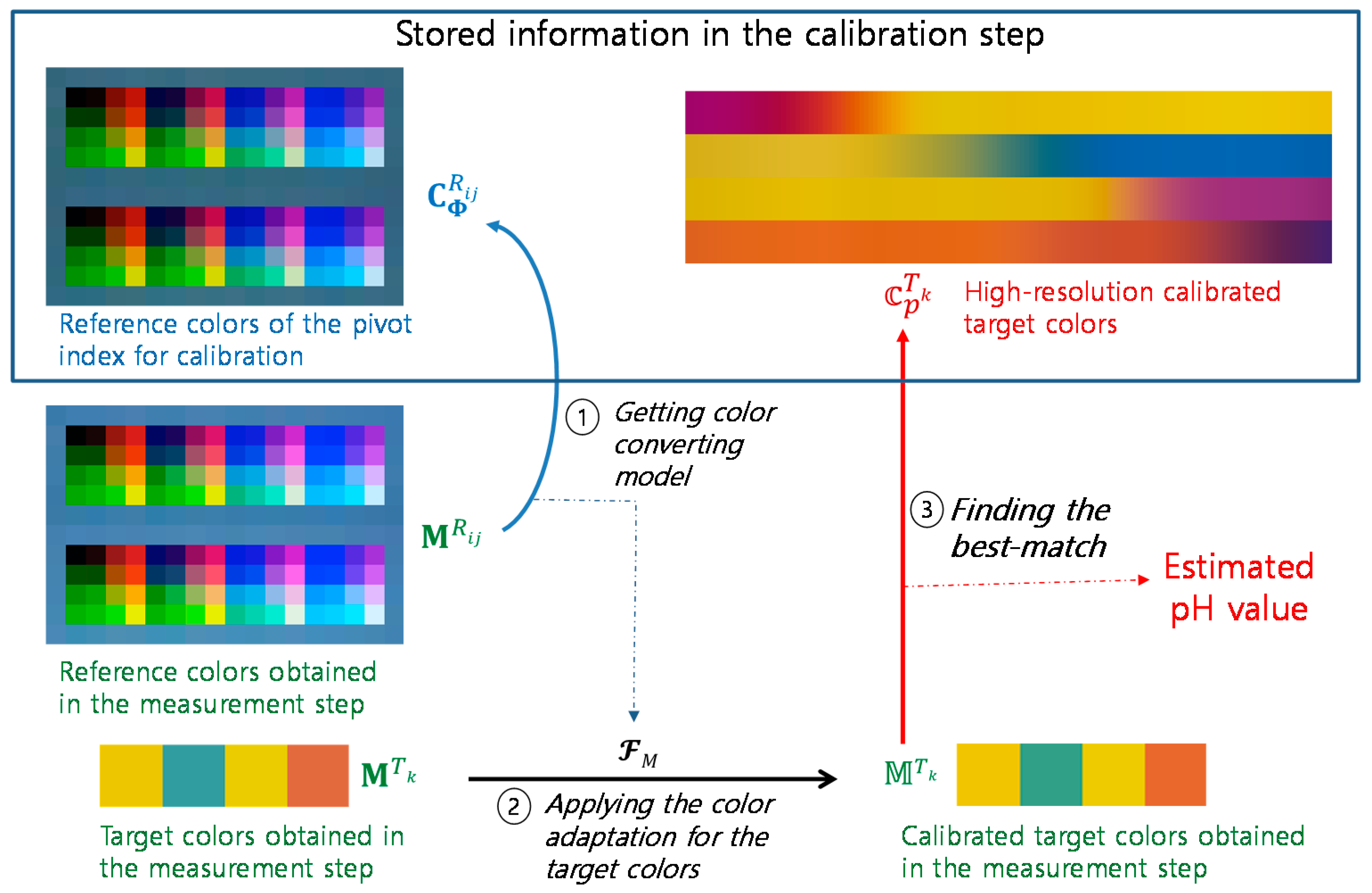
2.3. Measurement Step Based on Color Adaptation and Best-Matching
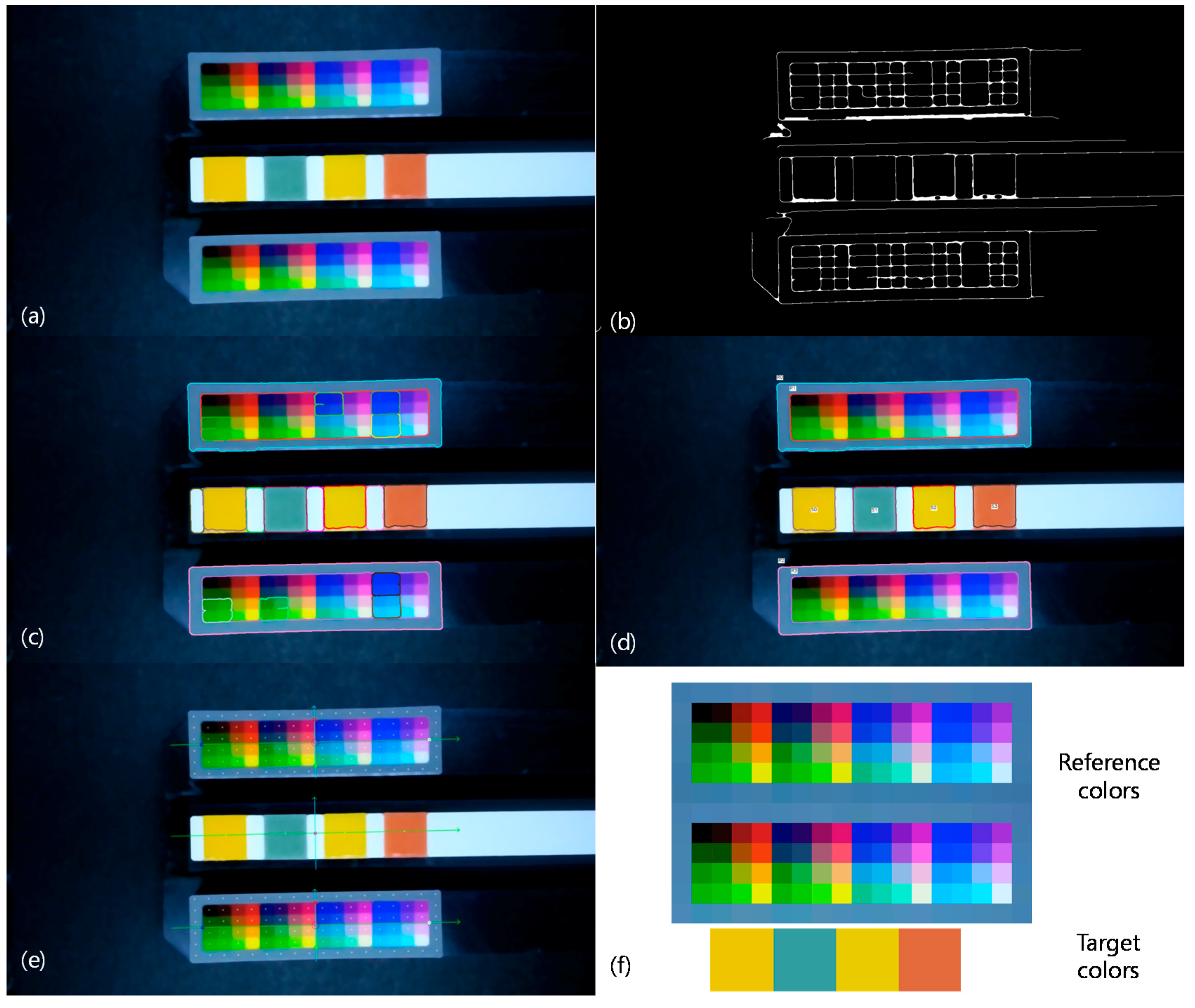
2.4. Automatic Color Retrieving Algorithm
3. Results and Discussion
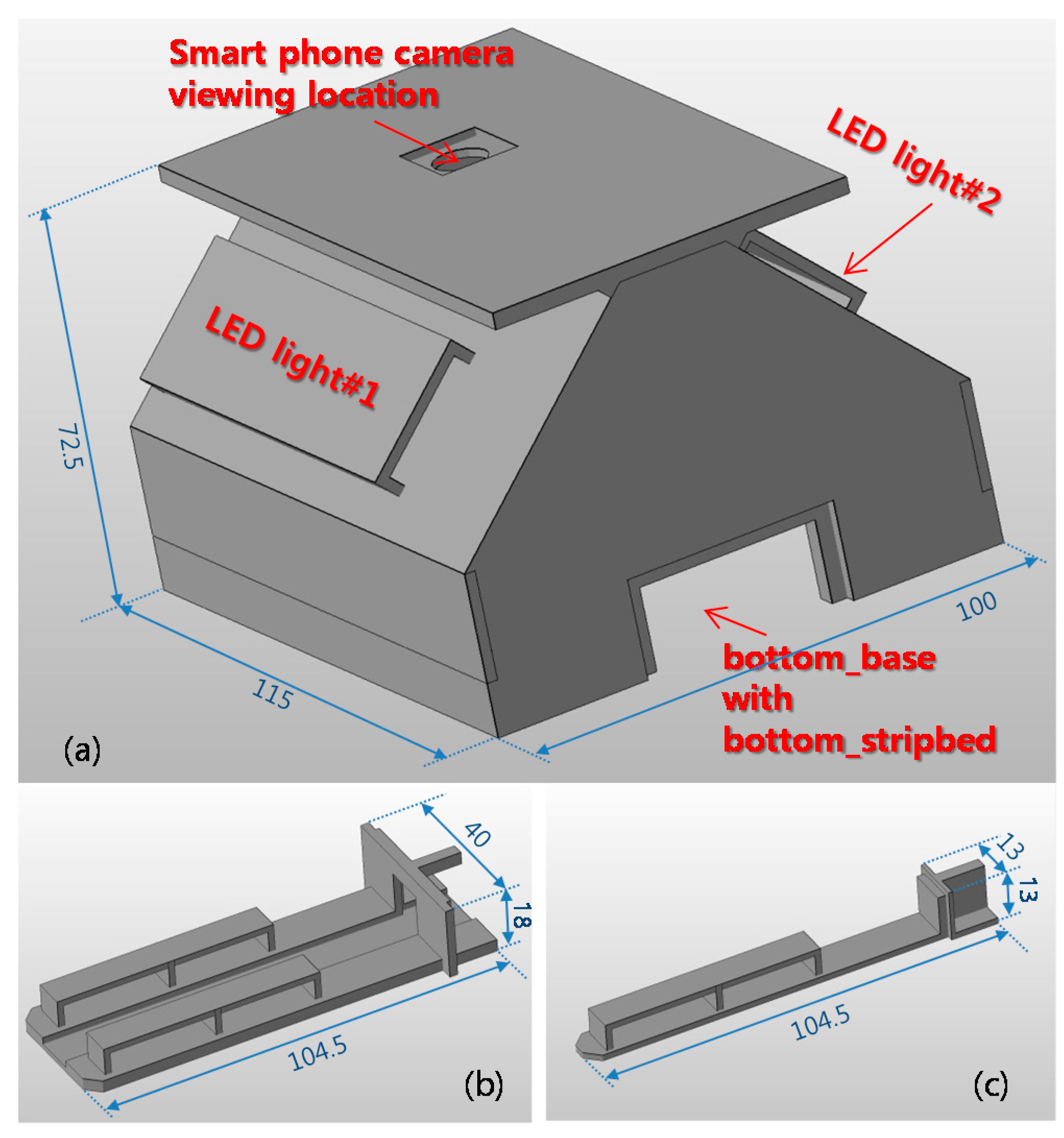
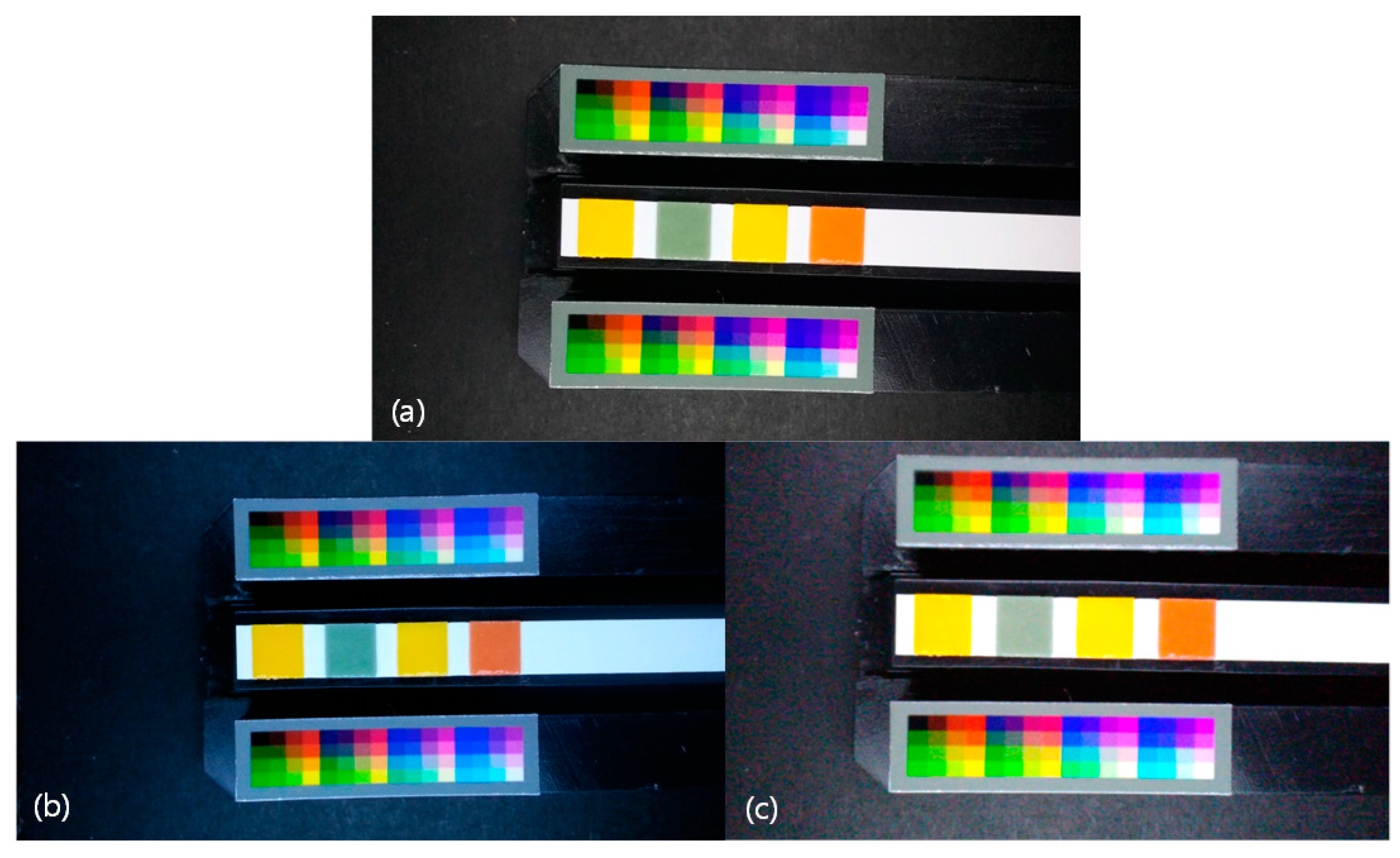
3.1. Automatic Color Retrieving in the 3D Printed Mini Light Box
3.2. Calibration Step Results
3.3. Measurement Step Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Martinez, A.W.; Philips, S.T.; Whitesides, G.M. Diagnostics for the developing world: Microfluidic paper-based analytical devices. Anal. Chem. 2010, 82, 3–10. [Google Scholar] [CrossRef] [PubMed]
- Wei, Q.; Nagi, R.; Sadeghi, K.; Feng, S.; Yan, E.; Ki, S.J.; Caire, R.; Tseng, D.; Ozcan, A. Detection and spatial mapping of mercury contamination in water samples using a smart-phone. ACS Nano 2014, 8, 1121–1129. [Google Scholar] [CrossRef] [PubMed]
- Sicard, C.; Glen, C.; Aubie, B.; Wallace, D.; Jahanshahi-Anbuhi, S.; Pennings, K.; Daigger, G.T.; Pelton, R.; Brennan, J.D.; Filipe, C.D.M. Tools for water quality monitoring and mapping using paper-based sensors and cell phones. Water Res. 2015, 70, 360–369. [Google Scholar] [CrossRef] [PubMed]
- Schaefer, S. Colorimetric Water Quality Sensing with Mobile Smart Phones. Master’s Thesis, University of British Columbia, Vancouver, BC, Canada, April 2014. [Google Scholar]
- Oncescu, V.; O’Dell, D.; Erickson, D. Smartphone based health accessory for colorimetric detection of biomarkers in sweat and saliva. Lab Chip 2013, 13, 3232–3238. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Kim, S.; Yang, J.-S.; Lee, J.-H.; Joo, C.; Jung, H.-I. Real-time measurement of human salivary cortisol for the assessment of psychological stress using a smartphone. Sens. BioSens. Res. 2014, 2, 8–11. [Google Scholar] [CrossRef]
- Roda, A.; Guardigli, M.; Calabria, D.; Calabretta, M.M.; Cevenini, L.; Michelini, E. A 3D-printed device for a smartphone-based chemiluminescence biosensor for lactate in oral fluid and sweat. Analyst 2014, 139, 6494–6501. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Cao, X.; Wang, L.; Zhao, X.; Zhang, S.; Wang, P. Printed microwells with highly stable thin-film enzyme coatings for point-of-care multiplex bioassay of blood samples. Analyst 2015, 140, 4105–4113. [Google Scholar] [CrossRef] [PubMed]
- Romeo, A.; Leung, T.S.; Sánchez, S. Smart biosensors for multiplexed and fully integrated point-of-care diagnostics. Lab Chip 2016, 16, 1957–1961. [Google Scholar] [CrossRef] [PubMed]
- Roda, A.; Michelini, E.; Zangheri, M.; Di Fusco, M.; Calabria, D.; Simoni, P. Smartphone-based biosensors: A critical review and perspectives. Trends Anal. Chem. 2016, 79, 317–325. [Google Scholar] [CrossRef]
- Shen, L.; Hagen, J.A.; Papautsky, I. Point-of-care colorimetric detection with a smartphone. Lab Chip 2012, 12, 4240–4243. [Google Scholar] [CrossRef] [PubMed]
- Chang, B.-Y. Smartphone-based chemistry instrumentation: Digitization of colorimetric measurements. Bull. Korean Chem. Soc. 2012, 33, 549–552. [Google Scholar] [CrossRef]
- Lee, H.-C. Introduction to Color Imaging Science; Cambridge University Press: Cambridge, MA, USA, 2005; pp. 403–406. [Google Scholar]
- Malacara, D. Color Vision and Colorimetry: Theory and Applications; SPIE Press: Washington, DC, USA, 2002; pp. 84–86. [Google Scholar]
- OpenSCAD. Available online: http://www.openscad.org/ (accessed on 22 May 2017).
- Formlabs. Form 1 + 3D Printer. Available online: https://formlabs.com/ (accessed on 22 May 2017).
- Adafruit. White LED Backlight Module. Available online: https://www.adafruit.com/product/1622 (accessed on 22 May 2017).
- Eaton, J.; Bateman, D.; Hauberg, S. GNU Octave. Available online: http://www.gnu.org/software/octave/doc/interpreter (accessed on 22 May 2017).
- Android Native Development Kit (NDK). Available online: http://developer.android.com/ndk/ (accessed on 22 May 2017).
- OpenCV Library. Available online: http://opencv.org/ (accessed on 22 May 2017).
- Bianco, S.; Schettini, R. Two new von Kries based chromatic adaptation transforms found by numerical optimization. Color Res. Appl. 2010, 35, 184–192. [Google Scholar] [CrossRef]
- Burrus, C.S. Iterative Reweighted Least Squares. OpenStax CNX. Available online: http://cnx.org/contents/92b90377-2b34-49e4-b26f-7fe572db78a1@12 (accessed on 22 May 2017).
- Eberly, D. Thin-Plate Splines, 2015. Available online: http://www.geometrictools.com/Documentation/ThinPlateSplines.pdf (accessed on 22 May 2017).
- Splines Package for GNU Octave. 2016. Available online: http://octave.sourceforge.io/splines/ (accessed on 22 May 2017).
- Jain, A.K. Fundamentals of Digital Image Processing; Prentice-Hall: Upper Saddle River, NJ, USA, 1989; pp. 246–249. [Google Scholar]
- Canny, J. A Computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Borges, C.F. Trichromatic approximation method for surface illumination. J. Opt. Soc. Am. A 1991, 8, 1319–1323. [Google Scholar] [CrossRef]
- Park, J.B.; Kak, A.C. A truncated least squares approach to the detection of specular highlights in color images. In Proceedings of the IEEE International Conference on Robotics Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1319–1323. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphone | pH (Ideal) | Estimated pH (with Four Captures) | Avg. |Err.| | Std. Dev. | |||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||||
| A | 1.68 | 1.5 | 1.5 | 1.5 | 1.5 | 0.18 | 0.00 |
| 4.01 | 4.1 | 4.1 | 4.2 | 4.2 | 0.14 | 0.05 | |
| 7.00 | 7.2 | 7.2 | 7.2 | 7.2 | 0.20 | 0.00 | |
| 10.01 | 9.9 | 9.9 | 9.9 | 9.9 | 0.11 | 0.00 | |
| 12.46 | 12.5 | 12.5 | 12.4 | 12.4 | 0.05 | 0.05 | |
| B | 1.68 | 1.5 | 1.5 | 1.5 | 1.5 | 0.18 | 0.00 |
| 4.01 | 4.1 | 4.1 | 4.2 | 4.4 | 0.19 | 0.12 | |
| 7.00 | 6.9 | 7.0 | 6.9 | 7.0 | 0.05 | 0.05 | |
| 10.01 | 9.8 | 9.8 | 9.9 | 9.9 | 0.16 | 0.05 | |
| 12.46 | 12.6 | 12.5 | 12.5 | 12.0 | 0.17 | 0.23 | |
| C | 1.68 | 1.6 | 1.6 | 1.6 | 1.5 | 0.11 | 0.04 |
| 4.01 | 4.3 | 4.3 | 4.1 | 4.2 | 0.22 | 0.08 | |
| 7.00 | 7.2 | 7.2 | 7.3 | 7.3 | 0.25 | 0.05 | |
| 10.01 | 10 | 9.8 | 9.7 | 9.8 | 0.19 | 0.11 | |
| 12.46 | 12.3 | 12.3 | 12.3 | 12.2 | 0.19 | 0.04 | |
| Smartphone | pH (Ideal) | Estimated pH (with Four Captures) | Avg. |Err.| | Std. Dev. | |||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | ||||
| A | 6.0 BS | 6.1 | 6.1 | 6.1 | 6.1 | 0.10 | 0.00 |
| 6.5 BS | 6.6 | 6.6 | 6.6 | 6.6 | 0.10 | 0.00 | |
| 7.4 PBS | 8.4 | 8.4 | 8.4 | 8.4 | 1.00 | 0.00 | |
| B | 6.0 BS | 6.0 | 6.1 | 6.1 | 6.1 | 0.07 | 0.04 |
| 6.5 BS | 6.5 | 6.5 | 6.4 | 6.3 | 0.08 | 0.08 | |
| 7.4 PBS | 8.2 | 8.3 | 8.2 | 8.3 | 0.85 | 0.05 | |
| C | 6.0 BS | 6.2 | 6.1 | 6.1 | 6.1 | 0.13 | 0.04 |
| 6.5 BS | 6.7 | 6.6 | 6.7 | 6.7 | 0.18 | 0.04 | |
| 7.4 PBS | 8.5 | 8.4 | 8.5 | 8.5 | 1.08 | 0.04 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.D.; Koo, Y.; Yun, Y. A Smartphone-Based Automatic Measurement Method for Colorimetric pH Detection Using a Color Adaptation Algorithm. Sensors 2017, 17, 1604. https://doi.org/10.3390/s17071604
Kim SD, Koo Y, Yun Y. A Smartphone-Based Automatic Measurement Method for Colorimetric pH Detection Using a Color Adaptation Algorithm. Sensors. 2017; 17(7):1604. https://doi.org/10.3390/s17071604
Chicago/Turabian StyleKim, Sung Deuk, Youngmi Koo, and Yeoheung Yun. 2017. "A Smartphone-Based Automatic Measurement Method for Colorimetric pH Detection Using a Color Adaptation Algorithm" Sensors 17, no. 7: 1604. https://doi.org/10.3390/s17071604
APA StyleKim, S. D., Koo, Y., & Yun, Y. (2017). A Smartphone-Based Automatic Measurement Method for Colorimetric pH Detection Using a Color Adaptation Algorithm. Sensors, 17(7), 1604. https://doi.org/10.3390/s17071604