Deep Source Localization with Magnetoencephalography Based on Sensor Array Decomposition and Beamforming

Abstract
:1. Introduction
2. Methods
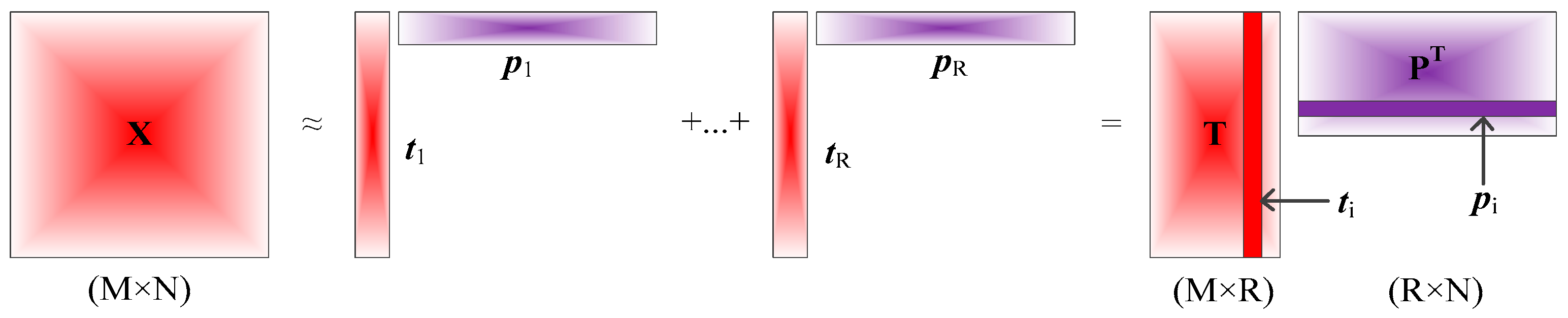
2.1. Iterative Matrix Decomposition
- Take some column vector xi as a starting vector t: tstart = xi
- Normalize tstart to length 1: tnew = tstart/‖tstart‖
- Calculate a new loading vector p: p = XTt
- Normalize p to length 1: pnew = pold/‖pold‖
- Calculate a new score vector t: t = Xp
- Normalize t to length 1: tnew = told/‖told‖
- Check for convergence by comparing the new t vector with the previous t vector obtained in step 2. If convergence is apparent, go to step 8. If there is no convergence, continue with step 3.
- Compute the residual matrix E: E = X − tpT, and the value of R is determined by the norm of the residual matrix E (when ‖E‖ > 0.1, go on).
| Algorithm 1. Pseudo Code for Iterative Matrix Decomposition. |
| Inputs: MEG sensors space matrix |
| Process: |
| 1. For i = 1,…,R |
| Randomly initialize t |
| , |
| While |
| End |
| Extract the score and loading vector t, p |
| Deflate X matrix: |
| End |
| 2. |
| 3. Reconstruct the sensors matrix |
| Outputs: Score matrix T, loading matrix P, and reconstruction matrix . |
2.2. Vector Beamforming Estimator
2.3. Data Preprocessing and Artifact Rejection
2.4. Source Localization Algorithm
| Algorithm 2. Deep Source Localization Procedure. |
| Forward solution: |
| 1. Construct the volume conduction model V based on a single shell approximation under the cortex constraint. |
| 2. Calculate the lead field matrices L under the cortex constraint. |
| 3. Denote the lead field matrix Li corresponding to the i-th grid point. |
| MEG sensor space decomposition: |
| 1. Pick out the k-th data segment Xk, of note, epilepsy patients data need to be contained the spike, and the time window width is about 200ms. |
| 2. Decompose the data matrix Xk as score components Tk and loading matrix Pk using the Algorithm 1. |
| 3. Reconstruct the sensors matrix . |
| Inverse solution: |
| 1. Estimate the covariance matrix using the Equation (4). |
| 2. Obtain the optimized weight matrix Wk(r) at the grid location r based on the Equation (7). |
| 3. Calculate the power value Powk(r) at the grid location r via the Equation (8). |
| Localization results display: |
| 1. Select those grid points corresponding to the larger power values. |
| 2. Visualize the result on the individual MRI using FieldTrip toolbox. |
2.5. SPS Algorithm
3. Experimental Results
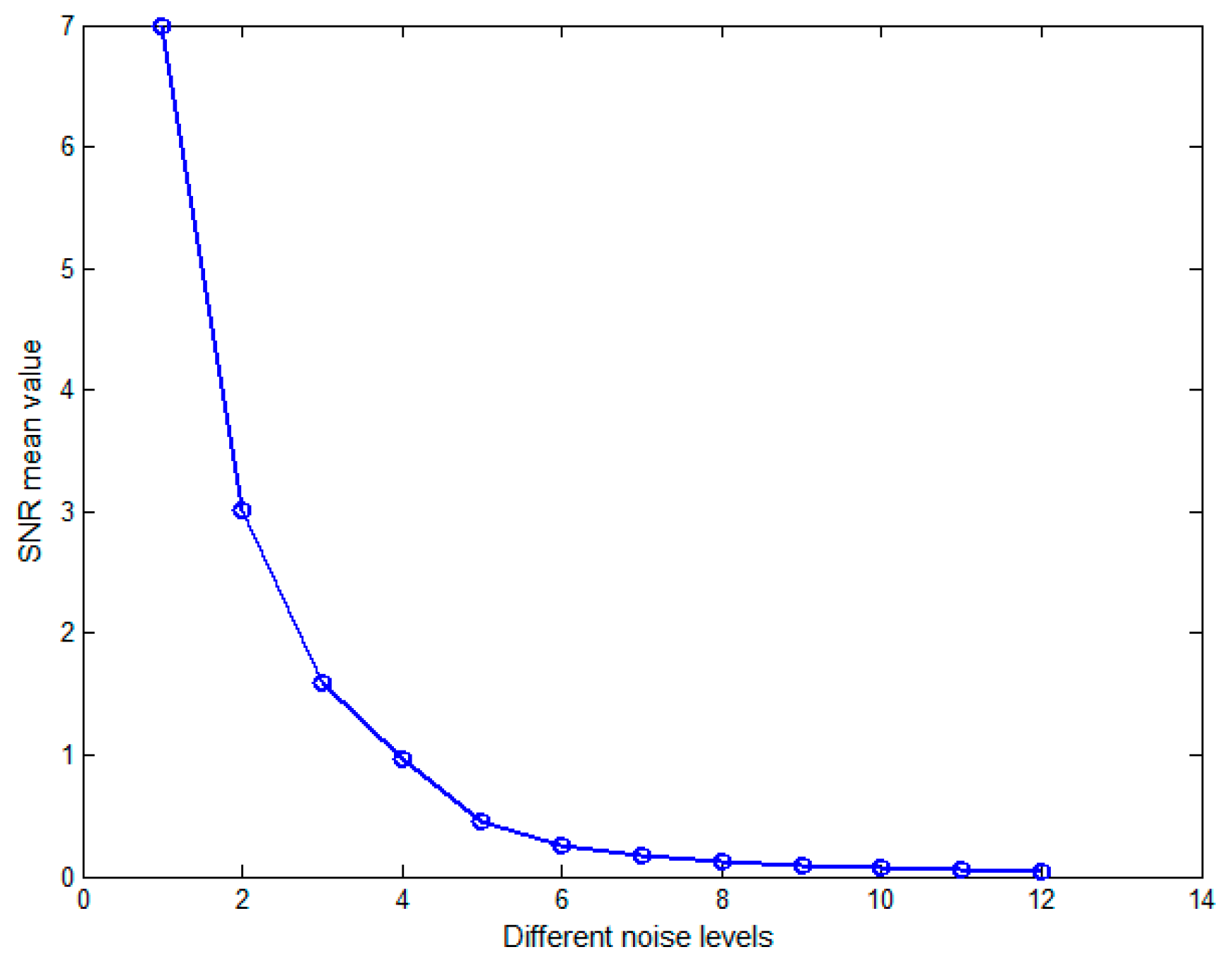
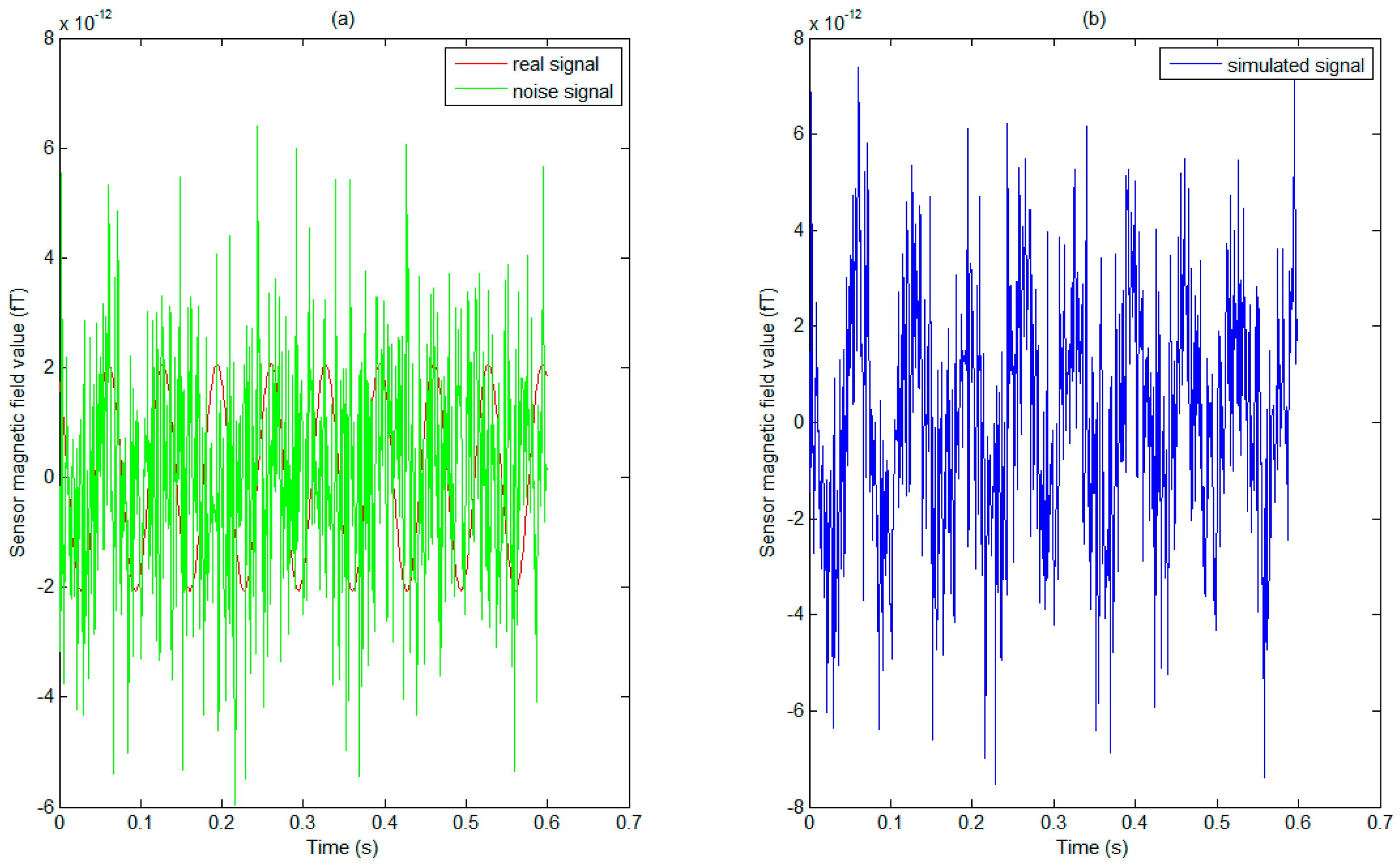
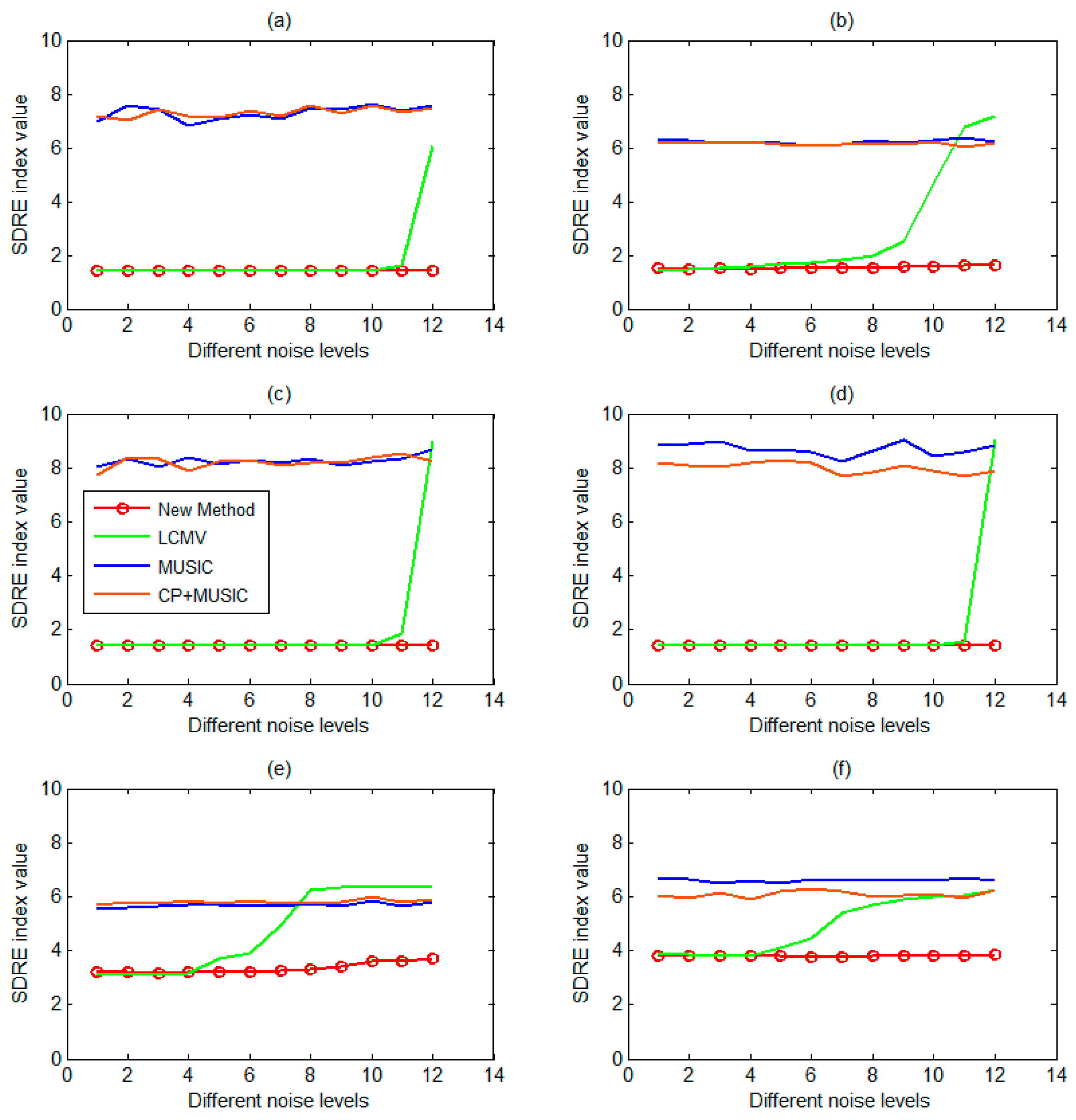
3.1. Simulated data Description and Results
3.2. Patients and Data Description
3.3. Epileptogenic Zone Localization Results
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nissen, I.A.; Stam, C.J.; Citroen, J.; Reijneveldb, J.C.; Hillebranda, A. Preoperative evaluation using magnetoencephalography: Experience in 382 epilepsy patients. Epilepsy Res. 2016, 124, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Barnes, G.R.; Hillebrand, A. Statistical flattening of MEG beamformer images. Hum. Brain Mapp. 2003, 18, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Rombetto, S.; Granata, C.; Vettoliere, A.; Russo, M. Multichannel system based on a high sensitivity superconductive sensor for magnetoencephalography. Sensors 2014, 14, 12114–12126. [Google Scholar] [CrossRef] [PubMed]
- Zumer, J.M.; Attias, H.T.; Sekihara, K.; Nagarajan, S.S. A probabilistic algorithm integrating source localization and noise suppression for MEG and EEG data. Neuroimage 2007, 37, 102–115. [Google Scholar] [CrossRef] [PubMed]
- Bast, T.; Oezkan, O.; Rona, S.; Stippich, C.; Seitz, A.; Rupp, A.; Fauser, S.; Zentner, J.; Rating, D.; Scherg, M. EEG and MEG source analysis of single and averaged interictal spikes reveals intrinsic epileptogenicity in focal cortical dysplasia. Epilepsia 2004, 45, 621–631. [Google Scholar] [CrossRef] [PubMed]
- Wennberg, R.; Cheyne, D. Reliability of MEG source imaging of anterior temporal spikes: Analysis of an intracranially characterized spike focus. Clin. Neurophysiol. 2014, 125, 903–918. [Google Scholar] [CrossRef] [PubMed]
- Leijten, F.S.; Huiskamp, G.J.; Hilgersom, I.; Van Huffelen, A.C. High-resolution source imaging in mesiotemporal lobe epilepsy: A comparison between MEG and simultaneous EEG. J. Clin. Neurophysiol. 2003, 20, 227–238. [Google Scholar] [CrossRef] [PubMed]
- Shigeto, H.; Morioka, T.; Hisada, K.; Nishio, S.; Ishibashi, H.; Kira, D.; Tobimatsu, S.; Kato, M. Feasibility and limitations of magnetoencephalographic detection of epileptic discharges: Simultaneous recording of magnetic fields and electrocorticography. Neurol. Res. 2002, 24, 531–536. [Google Scholar] [CrossRef] [PubMed]
- Wennberg, R.; Valianteb, T.; Cheynec, D. EEG and MEG in mesial temporal lobe epilepsy: Where do the spikes really come from? Clin. Neurophysiol. 2011, 122, 1295–1313. [Google Scholar] [CrossRef] [PubMed]
- Enatsu, R.; Mikuni, N.; Usui, K.; Matsubayashi, J.; Taki, J.; Begum, T.; Matsumoto, R.; Ikeda, A.; Nagamine, T.; Fukuyama, H.; et al. Usefulness of MEG magnetometer for spike detection in patients with mesial temporal epileptic focus. Neuroimage 2008, 41, 1206–1219. [Google Scholar] [CrossRef] [PubMed]
- Bagić, A.; Ebersole, J.S. Does MEG/MSI dipole variability mean unreliability? Clin. Neurophysiol. 2015, 126, 209–211. [Google Scholar] [CrossRef] [PubMed]
- Grech, R.; Cassar, T.; Muscat, J.; Camilleri, K.P.; Fabri, S.G.; Zervakis, M.; Xanthopoulos, P.; Sakkalis, V.; Vanrumste, B. Review on solving the inverse problem in EEG source analysis. J. NeuroEng. Rehabil. 2008, 5, 25. [Google Scholar] [CrossRef] [PubMed]
- Foong, S.; Sun, Z. High accuracy passive magnetic field-based localization for feedback control using principal component analysis. Sensors 2016, 16, 1280. [Google Scholar] [CrossRef] [PubMed]
- Sun, K.; Liu, Y.; Meng, H.; Wang, X. Adaptive sparse representation for source localization with gain/phase errors. Sensors 2011, 11, 4780–4793. [Google Scholar] [CrossRef] [PubMed]
- Van Veen, B.D.; Van Drongelen, W.; Yuchtman, M.; Suzuki, A. Localization of brain electrical activity via linearly constrained minimum variance spatial filtering. IEEE Trans. Biomed. Eng. 1997, 44, 867–880. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Liu, C. On linearly constrained minimum variance beamforming. J. Mach. Learn. Res. 2015, 16, 2099–2145. [Google Scholar]
- Diwakar, M.; Huang, M.X.; Srinivasan, R.; Harrington, D.L.; Robb, A.; Angeles, A.; Muzzatti, L.; Pakdaman, R.; Song, T.; Theilmann, R.J.; et al. Dual-core beamformer for obtaining highly correlated neuronal networks in MEG. Neuroimage 2011, 54, 253–263. [Google Scholar] [CrossRef] [PubMed]
- Zhou, G.; Cichocki, A.; Zhao, Q.; Xie, S. Nonnegative matrix and tensor factorizations: An algorithmic perspective. IEEE Signal Proc. Mag. 2014, 31, 54–65. [Google Scholar] [CrossRef]
- Taulu, S.; Simola, J. Spatiotemporal signal space separation method for rejecting nearby interference in MEG measurements. Phys. Med. Biol. 2006, 51, 1759. [Google Scholar] [CrossRef] [PubMed]
- Sekihara, K.; Nagarajan, S.S.; Poeppel, D.; Marantz, A.; Miyashita, Y. Reconstructing spatio-temporal activities of neural sources using an MEG vector beamformer technique. IEEE Trans. Biomed. Eng. 2001, 48, 760–771. [Google Scholar] [CrossRef] [PubMed]
- Dai, W.; Milenkovic, O. Subspace pursuit for compressive sensing signal reconstruction. IEEE Trans. Inf. Theory 2009, 55, 2230–2249. [Google Scholar] [CrossRef]
- Miyashita, Y.; Itozawa, T.; Katsumi, H.; Sasaki, S.I. Comments on the NIPALS algorithm. J. Chemometr. 1990, 4, 97–100. [Google Scholar] [CrossRef]
- Engel, J. Introduction to temporal lobe epilepsy. Epilepsy Res. 1996, 26, 141–150. [Google Scholar] [CrossRef]
- Engel, J. Mesial temporal lobe epilepsy: What have we learned? Neuroscientist 2001, 7, 340–352. [Google Scholar] [CrossRef] [PubMed]
- Sutherling, W.W.; Mamelak, A.N.; Thyerlei, D.; Maleeva, T.; Minazad, Y.; Philpott, L.; Lopez, N. Influence of magnetic source imaging for planning intracranial EEG in epilepsy. Neurology 2008, 71, 990–996. [Google Scholar] [CrossRef] [PubMed]
- Murakami, H.; Wang, Z.I.; Marashly, A.; Krishnan, B.; Prayson, R.A.; Kakisake, Y.; Mosher, J.C.; Bulacio, J.; Gonzalez-Martinez, J.A.; Bingaman, W.E.; et al. Correlating magnetoencephalography to stereo-electroencephalography in patients undergoing epilepsy surgery. Brain 2016, 139, 2935–2947. [Google Scholar] [CrossRef] [PubMed]
- Elekta Neuromag Oy. The MEG Signal Processor (graph) Users Guide and Reference Manual. Available online: http://www.martinos.org/meg/Neuromag-manuals.php (accessed on 1 August 2008).
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Kolda, T.G.; Bader, B.W. Tensor decompositions and applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Cichocki, A.; Hiroatsu, M.; Zhong, I.W.; Ahmad, M.; Balu, K.; Richard, A.P.; Yosuke, K.; John, C.M.; Juan, B.; Jorge, A.G.-M.; et al. Tensor decompositions for signal processing applications: From two-way to multiway component analysis. IEEE Signal Process. Mag. 2015, 32, 145–163. [Google Scholar] [CrossRef]
- Rahmani, M.; Atia, G.K. High dimensional low rank plus sparse matrix decomposition. IEEE Trans. Signal Process. 2016, 65, 2004–2019. [Google Scholar] [CrossRef]
- Gross, J.; Ioannides, A.A. Linear transformations of data space in MEG. Phys. Med. Biol. 1999, 44, 2081–2097. [Google Scholar] [CrossRef] [PubMed]
- Litvak, V.; Mattout, J.; Kiebel, S.; Phillips, C.; Henson, R.; Kilner, J.; Barnes, G.; Oostenveld, R.; Daunizeau, J.; Flandin, G.; et al. EEG and MEG data analysis in SPM8. Comput. Intell. Neurosci. 2011, 2011, 852961. [Google Scholar] [CrossRef] [PubMed]
- Oostenveld, R.; Fries, P.; Maris, E.; Schoffelen, J.M. FieldTrip: Open source software for advanced analysis of MEG, EEG, and invasive electrophysiological data. Comput. Intell. Neurosci. 2011, 2011, 156869. [Google Scholar] [CrossRef] [PubMed]
- Besl, P.J.; McKay, N.D. A method for registration of 3D shapes. IEEE Trans. Pattern Anal. 1992, 14, 239–254. [Google Scholar] [CrossRef]
- Nolte, G. The magnetic lead field theorem in the quasi-static approximation and its use for magnetoencephalography forward calculation in realistic volume conductors. Phys. Med. Biol. 2003, 48, 3637–3652. [Google Scholar] [CrossRef] [PubMed]
- Schaller, K.; Cabrilo, I. Anterior temporal lobectomy. Acta Neurochir. 2006, 158, 161–166. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.Y.; Sutherling, W.W.; Koh, S.; Salamon, N.; Jonas, R.; Yudovin, S.; Sankar, R.; Shields, W.D.; Mathern, G.W. Magnetic source imaging localizes epileptogenic zone in children with tuberous sclerosis complex. Neurology. 2006, 66, 1270–1272. [Google Scholar] [CrossRef] [PubMed]
- Nissen, I.A.; Stam, C.J.; Reijneveld, J.C.; van Straaten, I.E.C.W.; Hendriks, E.J.; Baayen, J.C.; Hamer, P.C.d.; Idema, S.; Hillebrand, A. Identifying the epileptogenic zone in interictal resting-state MEG source-space networks. Epilepsia 2017, 58, 137–148. [Google Scholar] [CrossRef] [PubMed]
- Hillebrand, A.; Singh, K.D.; Holliday, I.E.; Furlong, P.L.; Barnes, G.R. A new approach to neuroimaging with magnetoencephalography. Hum. Brain Mapp. 2005, 25, 199–211. [Google Scholar] [CrossRef] [PubMed]
- Oishi, M.; Kameyama, S.; Masuda, H.; Tohyama, J.; Kanazawa, O.; Sasagawa, M.; Otsubo, H. Single and multiple clusters of magnetoencephalographic dipoles in neocortical epilepsy: Significance in characterizing the epileptogenic zone. Epilepsia 2006, 47, 355–364. [Google Scholar] [CrossRef] [PubMed]
- Englot, D.J.; Nagarajan, S.S.; Imber, B.S.; Raygor, K.P.; Honma, S.M.; Mizuiri, D.; Mantle, M.; Knowlton, R.C.; Kirsch, H.E.; Chang, E.F. Epileptogenic zone localization using magnetoencephalography predicts seizure freedom in epilepsy surgery. Epilepsia 2015, 56, 949–958. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Patient No. | Sex | Age/Seizure Duration (years) | MRI | MEG (SPS) | Spike Number | Preoperative Assessment | Surgical Procedure | Pathology |
|---|---|---|---|---|---|---|---|---|
| 1 | M | 6/3 | RHS | RT | 26 | RT | RATH | HS, FCD |
| 2 | M | 41/18 | Normal | RT, In | 34 | RT | RATH | HS, FCD |
| 3 | M | 26/5 | LHS | LT | 18 | LT | LATH+Am | HS, FCD |
| 4 | F | 43/40 | HRH | RT, In | 15 | RT | RATH+Am | HS, FCD |
| 5 | M | 22/17 | LHS | LT | 23 | LT | LATH+Am | HS, FCD |
| 6 | M | 37/26 | RHS | RT | 35 | RT | RATH+Am | HS, FCD |
| 7 | F | 15/9 | RHS | RT | 37 | RT | RATH | HS, FCD |
| 8 | F | 27/11 | RHS | RT | 32 | RT | RATH | HS, FCD |
| 9 | M | 22/20 | LHS | LT, Pa | 32 | LT | LATH | HS, FCD |
| 10 | F | 39/13 | BHS | RT, In | 24 | RT | RATH+Am | HS, FCD |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Lin, Y.; Yang, B.; Tang, G.; Liu, T.; Wang, Y.; Zhang, J. Deep Source Localization with Magnetoencephalography Based on Sensor Array Decomposition and Beamforming. Sensors 2017, 17, 1860. https://doi.org/10.3390/s17081860
Hu Y, Lin Y, Yang B, Tang G, Liu T, Wang Y, Zhang J. Deep Source Localization with Magnetoencephalography Based on Sensor Array Decomposition and Beamforming. Sensors. 2017; 17(8):1860. https://doi.org/10.3390/s17081860
Chicago/Turabian StyleHu, Yegang, Yicong Lin, Baoshan Yang, Guangrui Tang, Tao Liu, Yuping Wang, and Jicong Zhang. 2017. "Deep Source Localization with Magnetoencephalography Based on Sensor Array Decomposition and Beamforming" Sensors 17, no. 8: 1860. https://doi.org/10.3390/s17081860
APA StyleHu, Y., Lin, Y., Yang, B., Tang, G., Liu, T., Wang, Y., & Zhang, J. (2017). Deep Source Localization with Magnetoencephalography Based on Sensor Array Decomposition and Beamforming. Sensors, 17(8), 1860. https://doi.org/10.3390/s17081860