Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks



Abstract
:1. Introduction
- For the first time, is formed based on multiple inputs. Using fuzzy-logic for processing the various inputs helps to balance the movement decision, which also helps to improve the localization ratio and the accuracy of the localization process.
- Ensures that a maximum number of the unknown nodes in the network are able to get the localization information when the distance of movement increases, while considering the limitation of the MA movement. By doing so, a larger quantity of unknown nodes can estimate their own positions in comparison to other models.
- Offers a competitive localization error. Implementing both the RSSI (Received Signal Strength Indicator) and the distance metrics in a fuzzy logic approach helps to improve the accuracy of the localization.
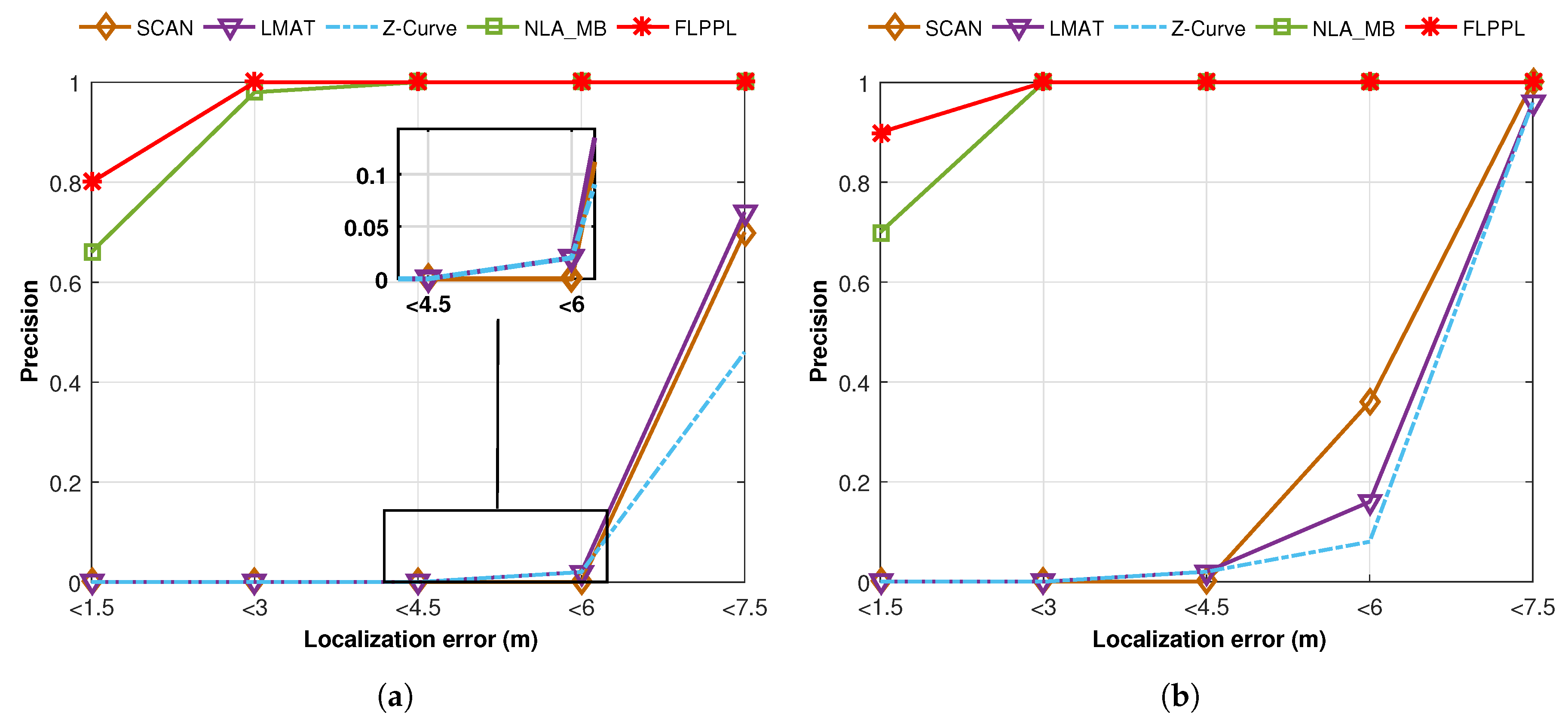
- Uses the precision metric for a better evaluation. Precision represents how many specific localization error values are achieved as in [8]. The proposed model offers very high precision in comparison to the other existed models.
2. Related Works
3. Fuzzy Logic in WSNs
4. System Model and Assumptions
- A two-dimensional square network. The area size of the network is denoted as S in .
- A collection of unknown nodes, UNs, are distributed randomly around the network. The number of UNs is denoted as N.
- Initially, all UNs are not location-aware.
- The deployed nodes are stationary, thus, no change to their location after deployment.
- Each sensor node has a stable communication range of in m.
- A mobile anchor, MA, can determine its own position at any point of the network area. It is able to travel freely around the entire network in straight directions. The number of MAs is denoted as M.
- For simplicity, no obstacles in the deployment area are considered.
- The movement distance of the MA is limited by the value of the maximum distance to travel, , where the MA’s movement cannot exceed that value.
- The MA stops frequently to provide nodes with information containing its current position and continue moving. Each stopping point is called a localization point.
- Each MA and UN can contact each other only if their locations are within the communication range .
- Once a UN receives any three different locations information, it will be able to estimate its own location using the applied localization algorithm.
- Each node that succeeds in estimating its location, will be converted from a UN to a reference node, RN. Each RN can share its location with the other nodes, helping them to estimate their own locations.
5. Proposed Model
5.1. Constraints and Objectives Analysis
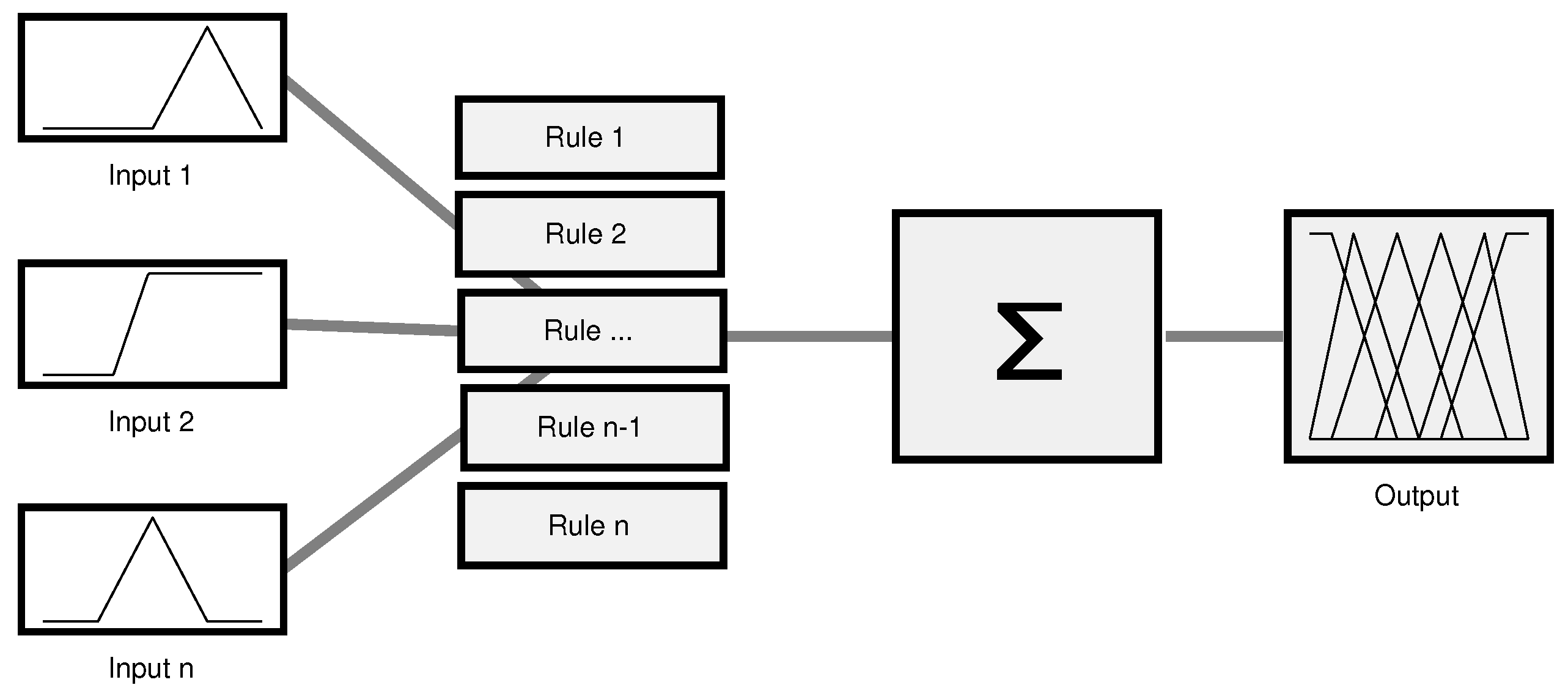
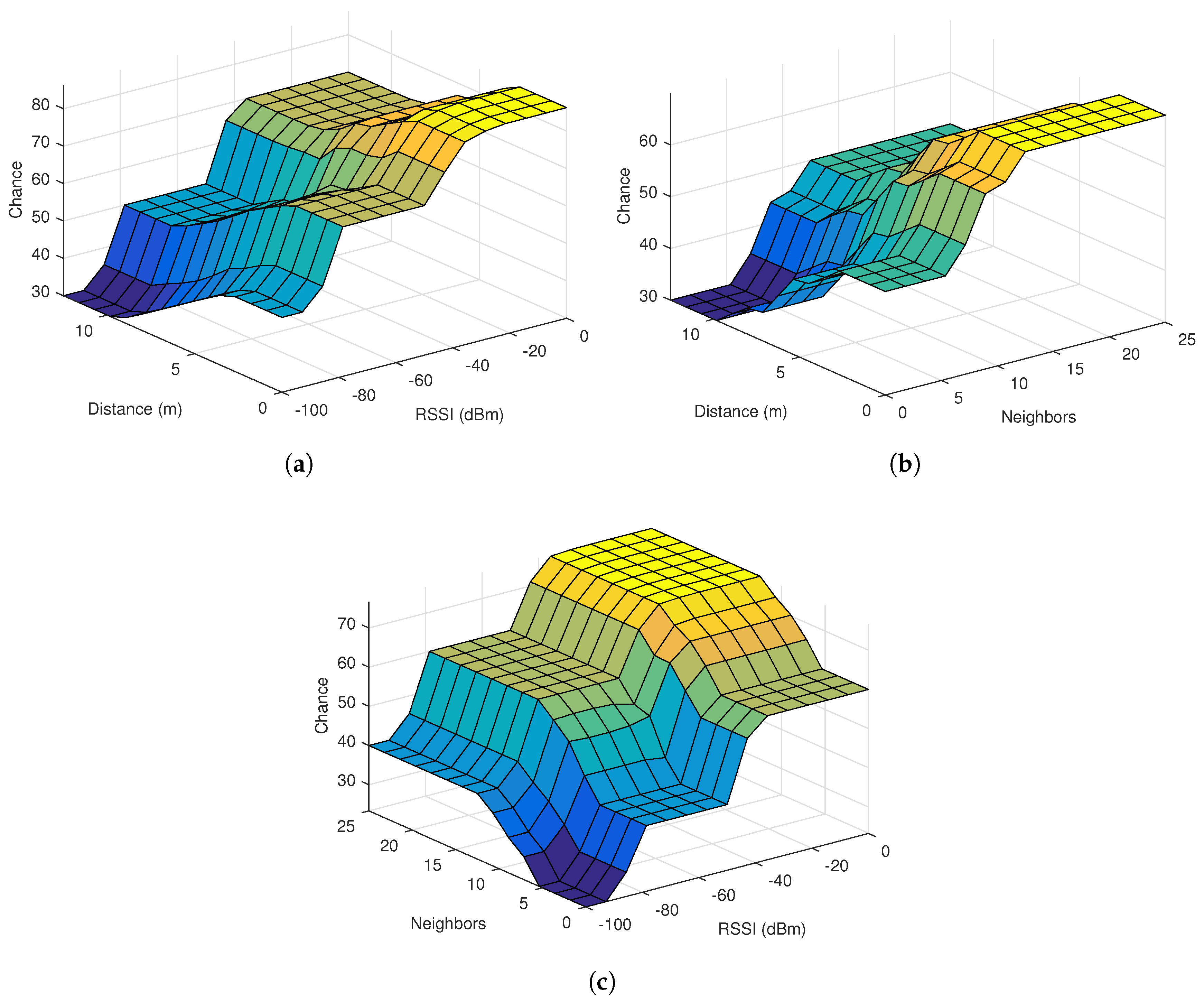
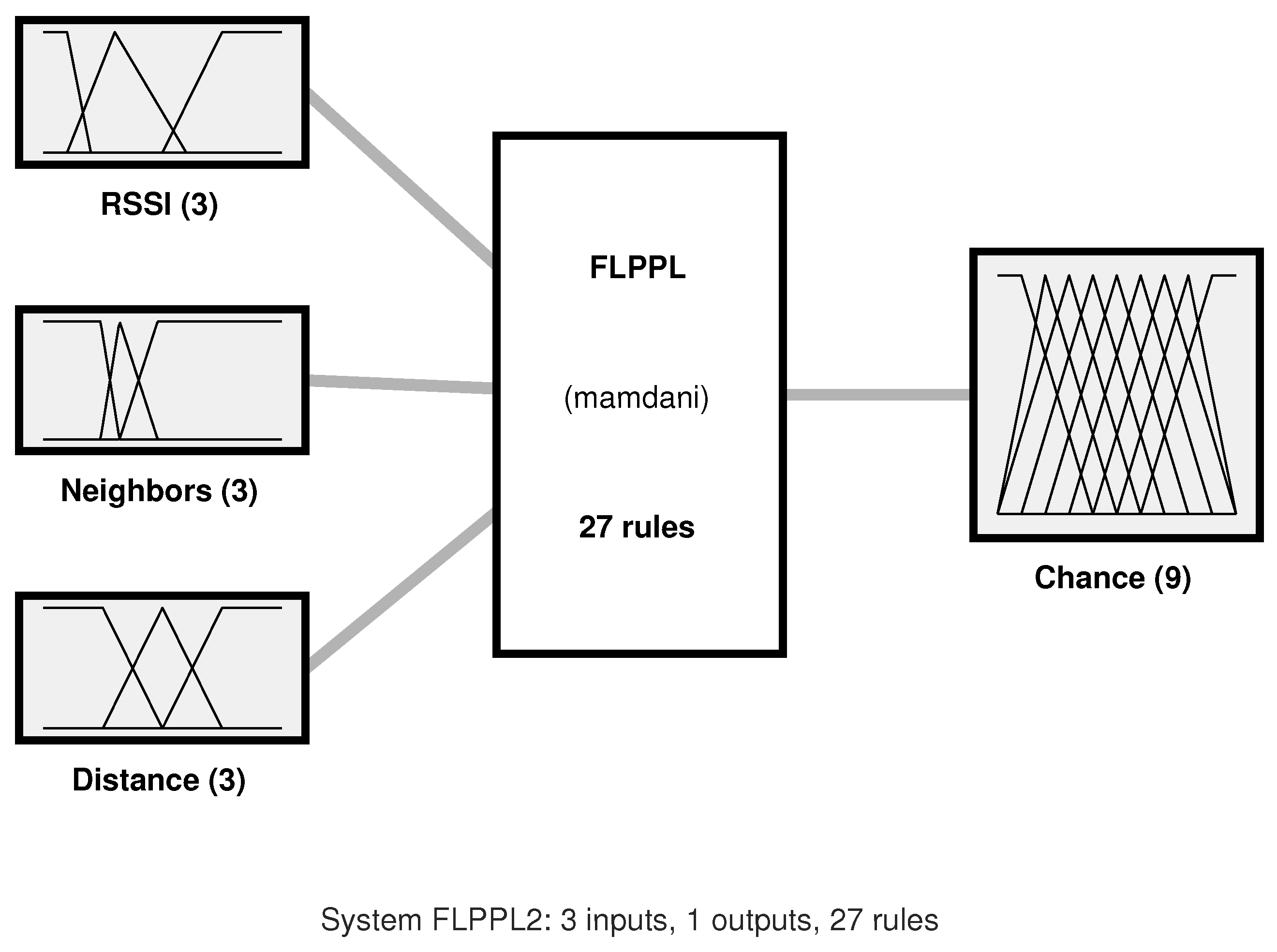
5.2. Fuzzy-Logic Based Movement Decision
5.3. Mobility Movement and Localization Process
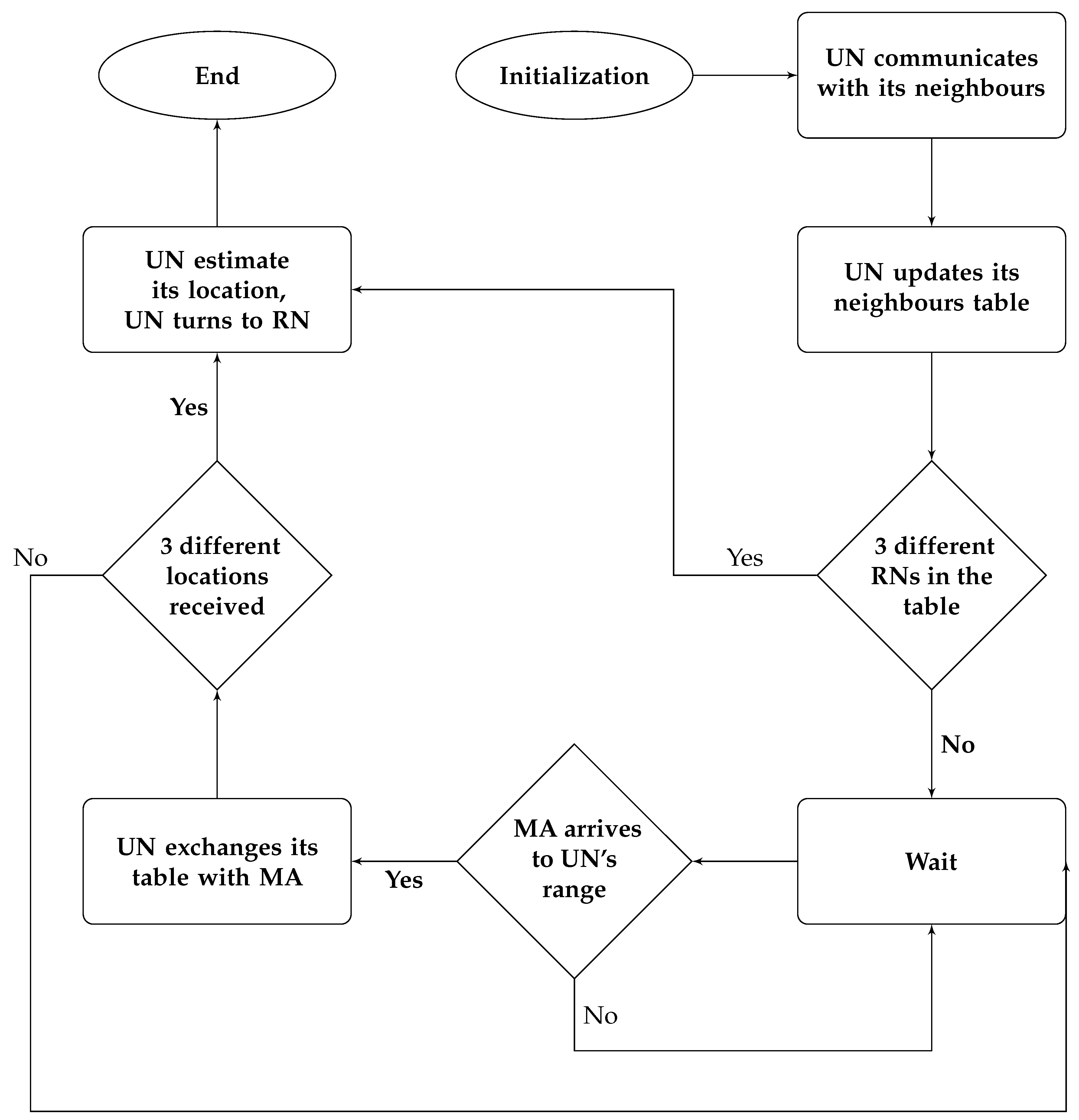
5.3.1. Procedure in Unknown Node’s Side
- UNs will be deployed randomly.
- Each node will communicate with its neighbours’ node that are located within its communication range, collecting their information and adding them to its neighbours table was shown above in Table 3.
- When MA arrives at each node, the node will exchange its table with the MA.
- When three different locations are received by each UN, it will be able to calculate its own location.
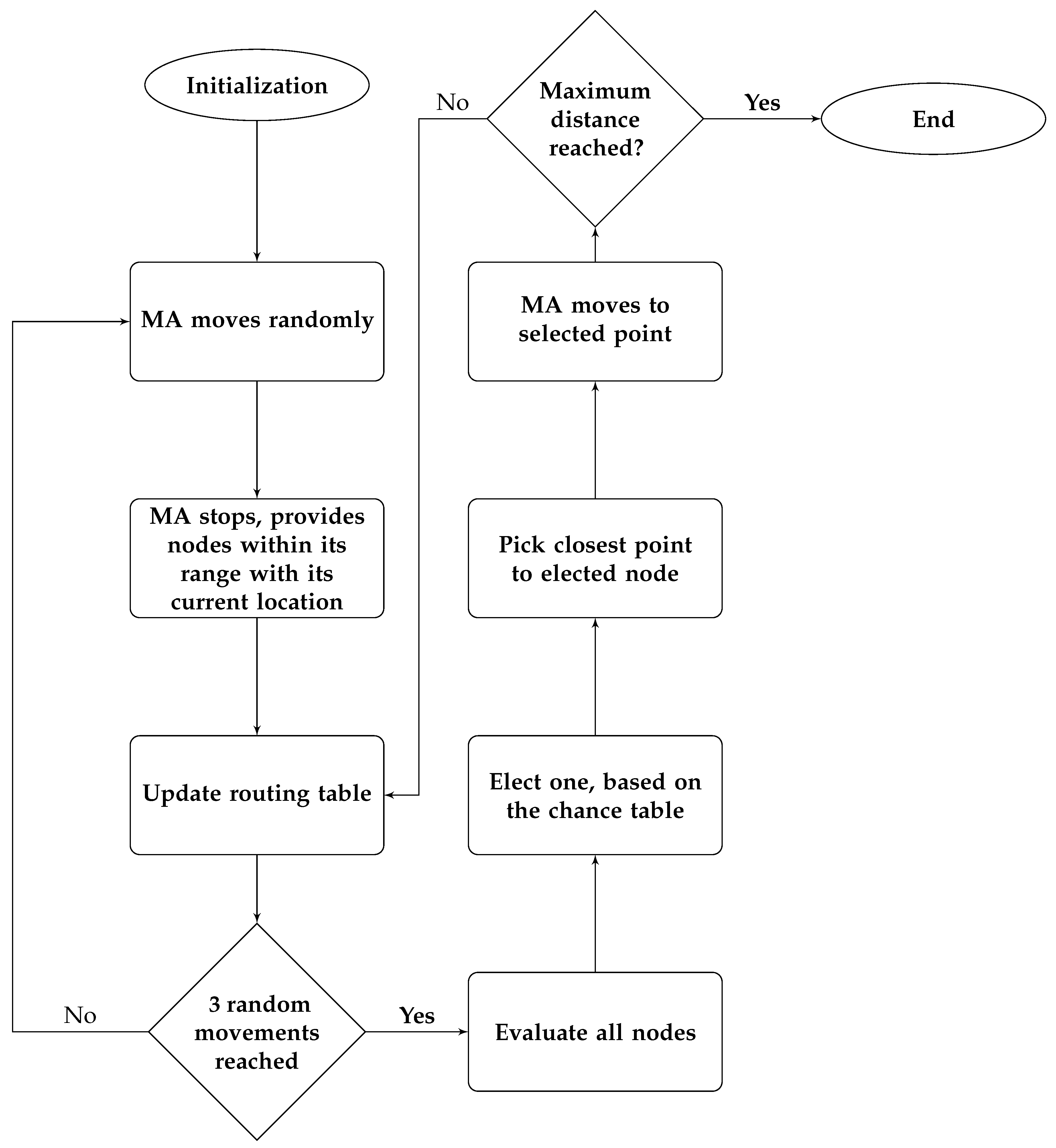
5.3.2. Procedure on MA Side
- MA will start its journey from a starting point, the starting point can be set in advanced or random.
- MA has a maximum distance value.
- The first three movements will be random in any direction.
- After each movement, the MA will stop and communicate with all nodes in its communications range, providing them with its current position.
- It will update its routing table, which has the following information:
- (a)
- Node IDs
- (b)
- Node’s status
- (c)
- Number of neighbours
- (d)
- Neighbours IDs
- (e)
- Neighbours’ status
- (f)
- RSSI value
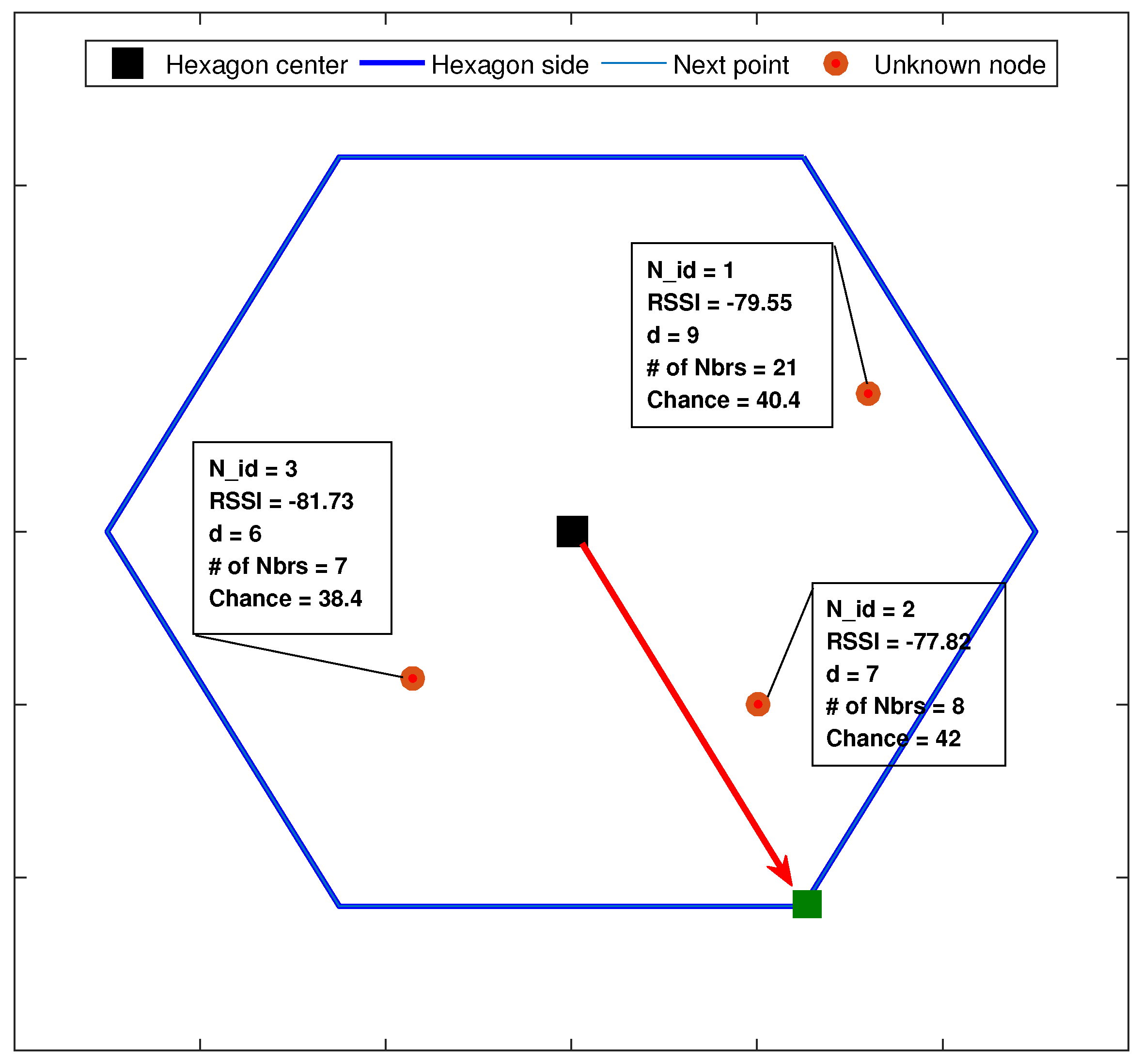
- The MA will evaluate all nodes and elect one based on the previous chance table.
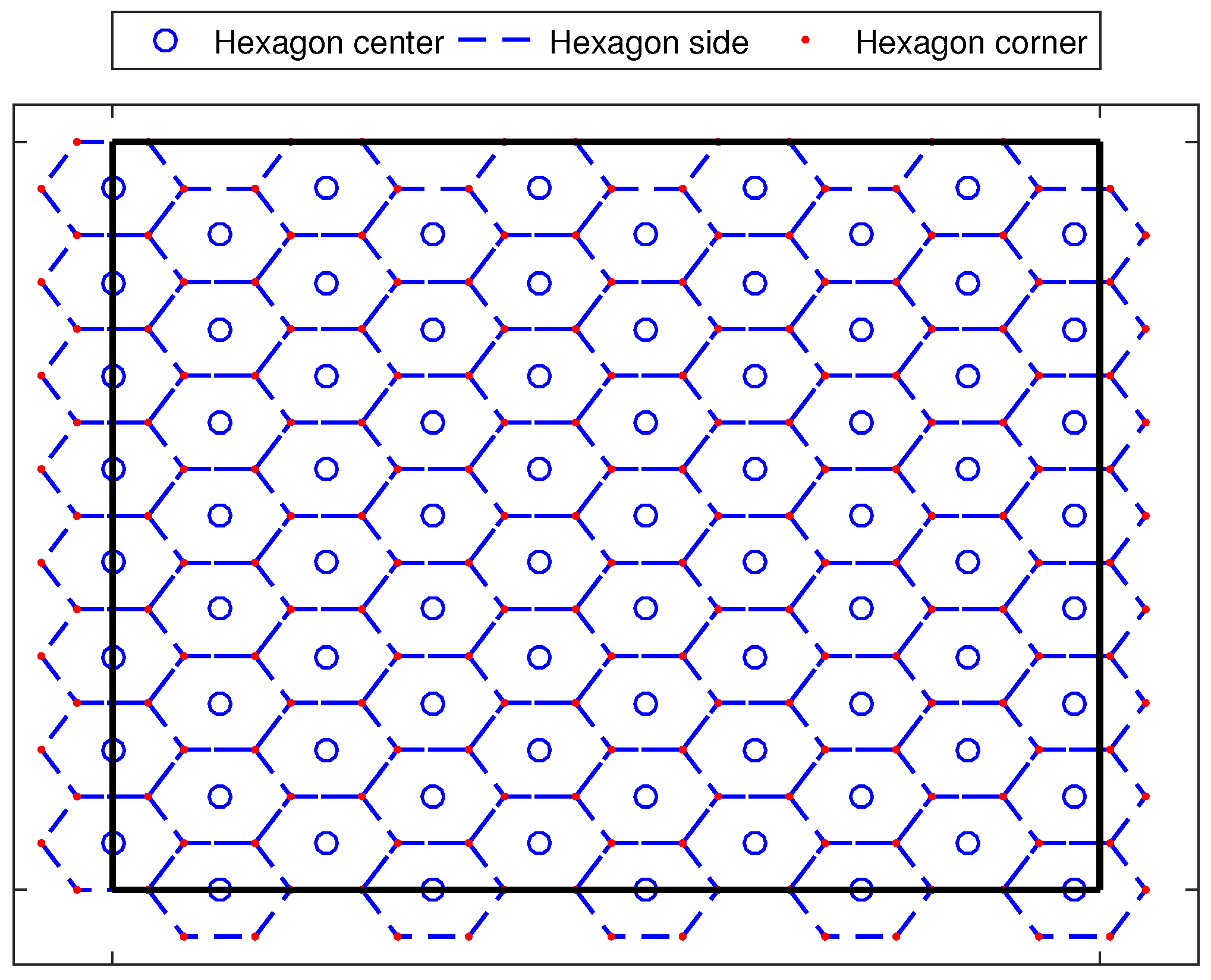
- The next point of the hexagonal will be the shortest point in distance to the elected node.
- MA will travel to that point and provide its current position information.
- MA keeps moving till reaching the maximum distance, .
6. Performance Settings
7. Evaluation and Results
7.1. Localization Accuracy
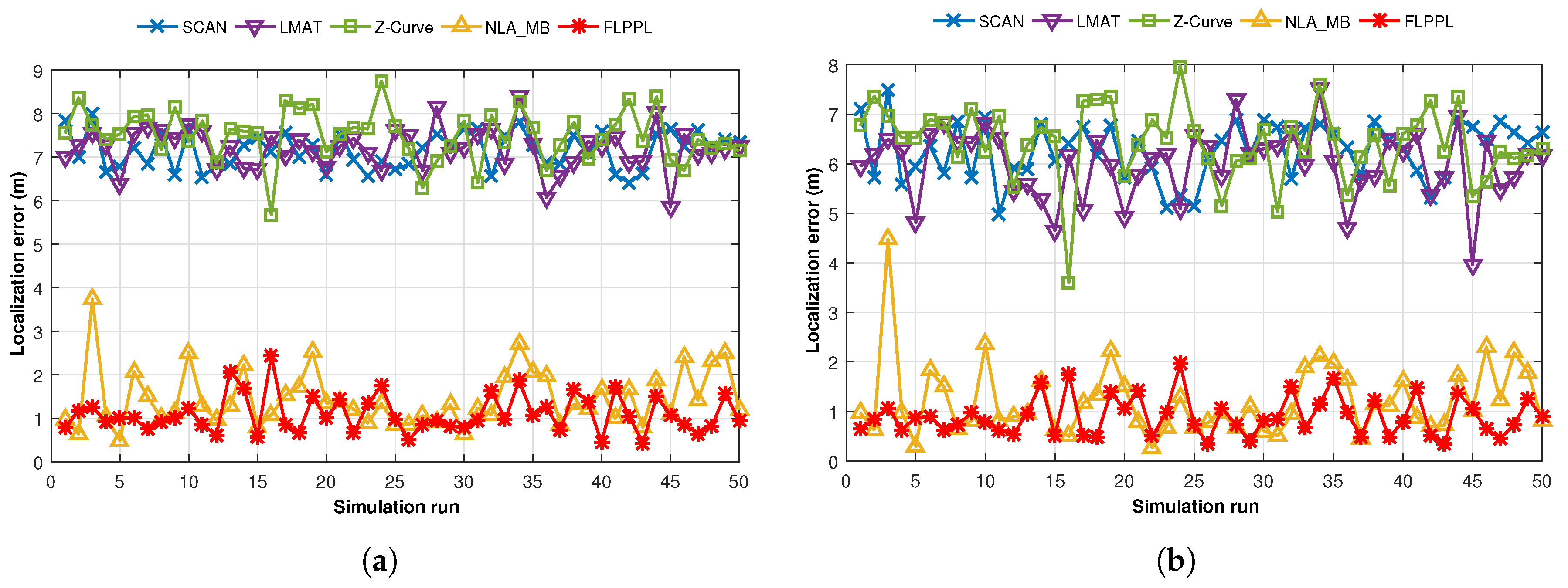
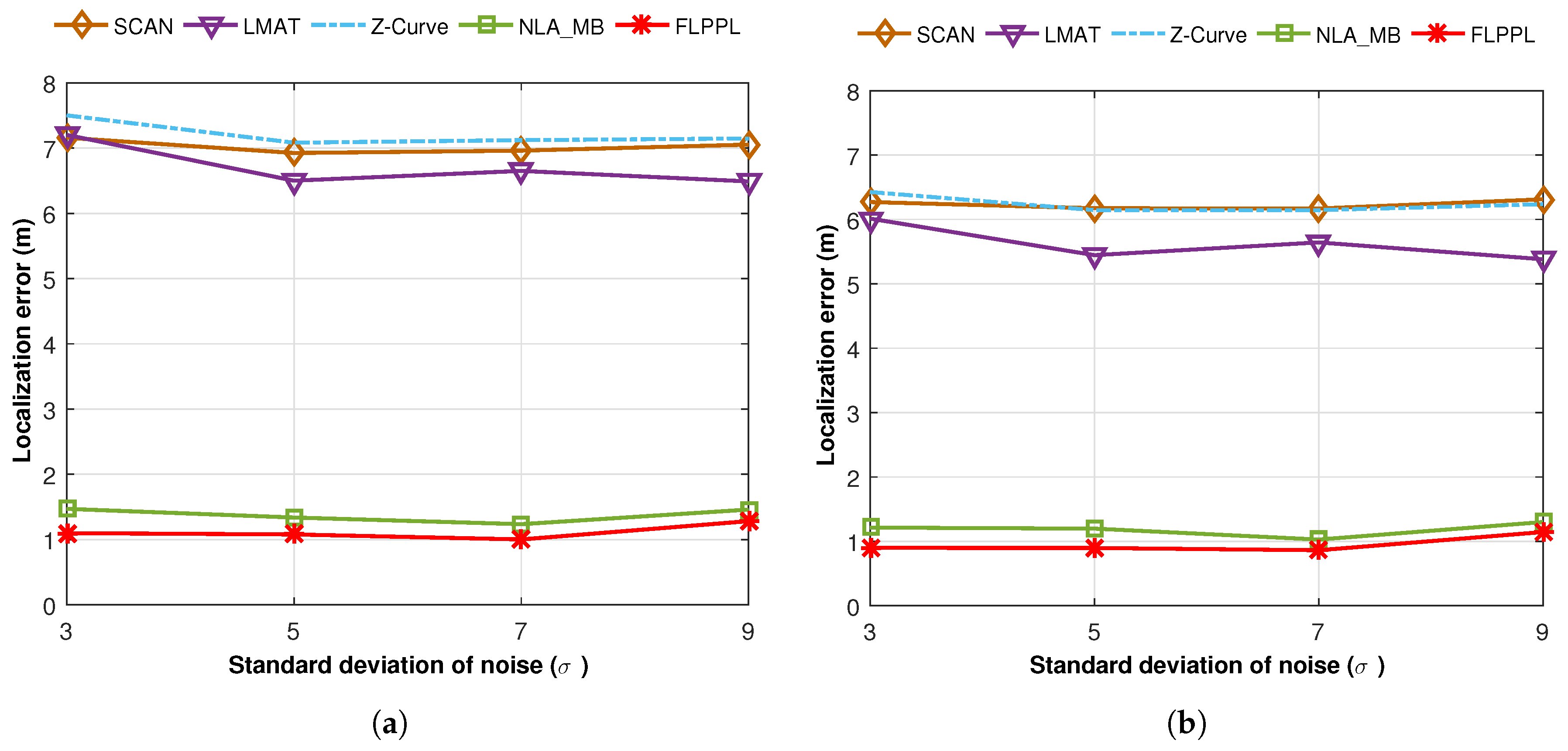
7.1.1. Average Localization Error
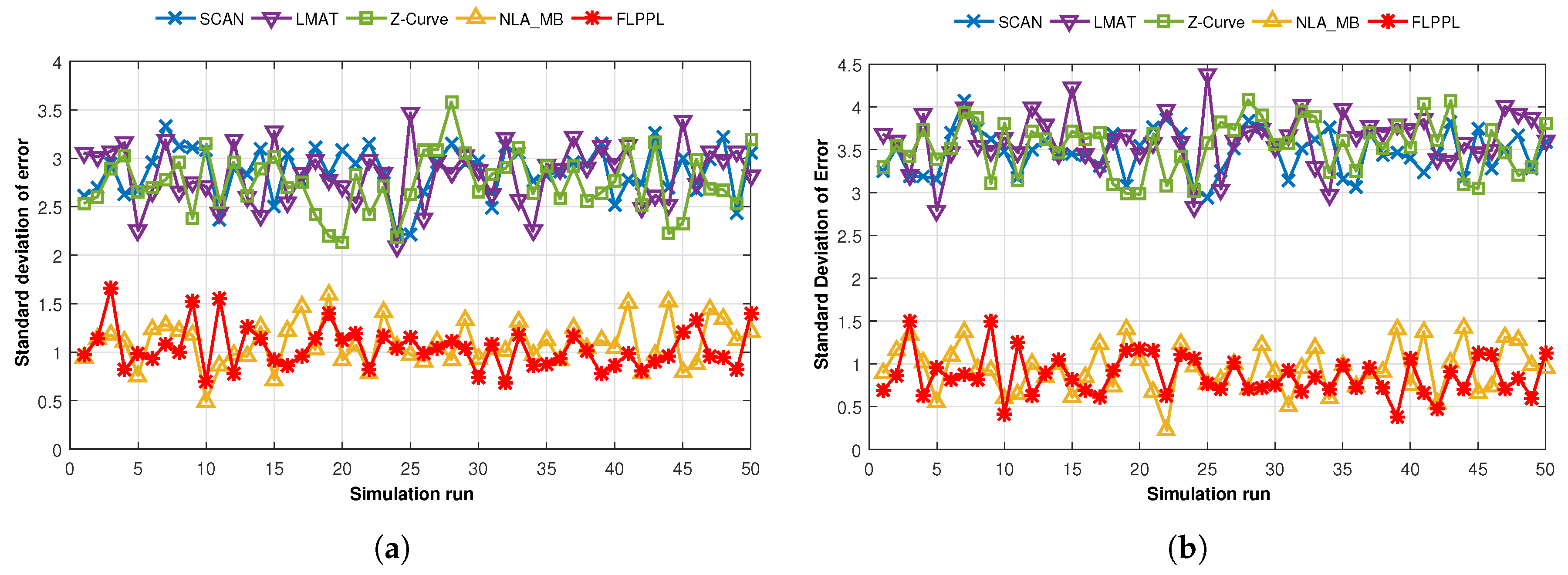
7.1.2. Standard Deviation of the Localization Error
7.2. Precision
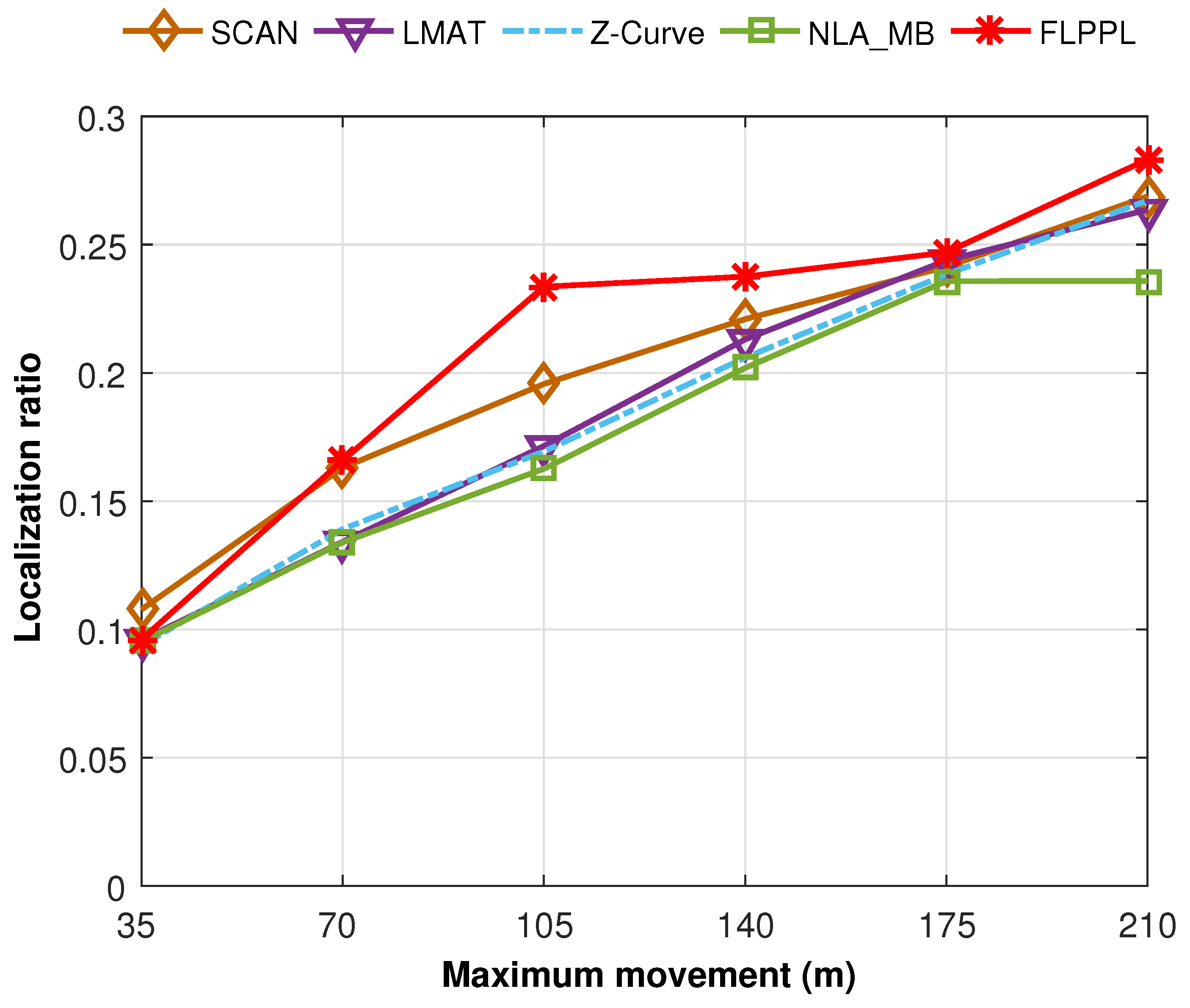
7.3. Localization Ratio
8. Discussion
8.1. Extension and Future Work
8.2. Limitations
9. Conclusions
- Localization precision: The FLPPL dynamic model presents superior precision results with the highest ratios in both WCL and WCWCL as indicated in Figure 16.
- Coverage: In general, the static models perform better than the others in terms of network coverage. However, this not necessarily true when MA movement is constrained and limited. FLPPL consider three inputs in its movement decision, the RSSI signal, the distance between nodes and anchors and the number of neighbours of nodes which increases the number of localized nodes effectively. These results hold in both experiments when using different distances of movement as shown in Figure 17.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BRF | Breadth-First |
| BTG | Backtracking Greedy |
| CH | Cluster Head |
| DPMB | Dynamic Path of Mobile Beacon algorithm |
| FIS | Fuzzy Logic Inference System |
| FL | Fuzzy Logic |
| FLC | Fuzzy Logic Controller |
| FLCFP | Fuzzy Logic Cluster Formation Protocol |
| FLPPL | Fuzzy-Logic based Path Planning for mobile anchor-assisted Localization |
| GPS | Global Positioning System |
| LMAT | Localization algorithm with a Mobile Anchor node based on Trilateration |
| MA | Mobile Anchor |
| MAALRH | Mobile Anchor-Assisted Localization algorithm based on a Regular Hexagon |
| NLA_MB | Node Localization Algorithm with Mobile Beacon node |
| PSO | Particle Swarm Optimization |
| RN | Reference Node |
| RSSI | Received Signal Strength Indicator |
| WCL | Weighted Centroid Localization algorithm |
| WCWCL | Weight-Compensated Weighted Centroid Localization |
| WSN | Wireless Sensor Network |
| UAV | Unmanned Aerial Vehicle |
| UN | Unknown Node |
References
- Borges, L.M.; Velez, F.J.; Lebres, A.S. Survey on the Characterization and Classification of Wireless Sensor Network Applications. IEEE Commun. Surv. Tutor. 2014, 16, 1860–1890. [Google Scholar] [CrossRef]
- Fei, Z.; Li, B.; Yang, S.; Xing, C.; Chen, H.; Hanzo, L. A Survey of Multi-Objective Optimization in Wireless Sensor Networks: Metrics, Algorithms, and Open Problems. IEEE Commun. Surv. Tutor. 2017, 19, 550–586. [Google Scholar] [CrossRef]
- Karl, H.; Willig, A. Protocols and Architectures for Wireless Sensor Networks; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Halder, S.; Ghosal, A. A survey on mobile anchor assisted localization techniques in wireless sensor networks. Wirel. Netw. 2016, 22, 2317–2336. [Google Scholar] [CrossRef]
- Mondal, K.; Mandal, P.S. Range-Free Mobile Node Localization Using Static Anchor. In Wireless Algorithms, Systems, and Applications, Proceedings of the 8th International Conference, WASA 2013, Zhangjiajie, China, 7–10 August 2013; Ren, K., Liu, X., Liang, W., Xu, M., Jia, X., Xing, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 269–284. [Google Scholar]
- Pescaru, D.; Curiac, D.I. Anchor Node Localization for Wireless Sensor Networks Using Video and Compass Information Fusion. Sensors 2014, 14, 4211–4224. [Google Scholar] [CrossRef] [PubMed]
- Miao, C.; Dai, G.; Ying, K.; Chen, Q. Collaborative Localization and Location Verification in WSNs. Sensors 2015, 15, 10631–10649. [Google Scholar] [CrossRef] [PubMed]
- Alomari, A.; Comeau, F.; Phillips, W.; Aslam, N. New Path Planning Model for Mobile Anchor-Assisted Localization In Wireless Sensor Networks. 2017. Available online: http://dx.doi.org/10.1007/s11276-017-1493-2 (accessed on 1 June 2017).
- Alomari, A.; Aslam, N.; Phillips, W.; Comeau, F. Three-dimensional path planning model for mobile anchor-assisted localization in Wireless Sensor Networks. In Proceedings of the IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–5. [Google Scholar]
- Han, G.; Xu, H.; Jiang, J.; Shu, L.; Hara, T.; Nishio, S. Path planning using a mobile anchor node based on trilateration in wireless sensor networks. Wirel. Commun. Mob. Comput. 2013, 13, 1324–1336. [Google Scholar] [CrossRef]
- Fu, S.Y.; Han, L.W.; Tian, Y.; Yang, G.S. Path planning for unmanned aerial vehicle based on genetic algorithm. In Proceedings of the IEEE 11th International Conference on Cognitive Informatics and Cognitive Computing, Kyoto, Japan, 22–24 August 2012; pp. 140–144. [Google Scholar]
- Yao, K.; Li, J.; Sun, B.; Zhang, J. An adaptive grid model based on mobility constraints for UAV path planning. In Proceedings of the 2nd International Conference on Control Science and Systems Engineering (ICCSSE), Singapore, 27–29 July 2016; pp. 207–211. [Google Scholar]
- Ahmed, S.; Mohamed, A.; Harras, K.; Kholief, M.; Mesbah, S. Energy efficient path planning techniques for UAV-based systems with space discretization. In Proceedings of the IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Hernandez, K.; Bacca, B.; Posso, B. Multi-goal Path Planning Autonomous System for Picking up and Delivery Tasks in Mobile Robotics. IEEE Lat. Am. Trans. 2017, 15, 232–238. [Google Scholar] [CrossRef]
- Joshy, P.; Supriya, P. Implementation of robotic path planning using Ant Colony Optimization Algorithm. In Proceedings of the 2016 International Conference on Inventive Computation Technologies (ICICT), Tamilnadu, India, 26–27 August 2016; Volume 1, pp. 1–6. [Google Scholar]
- Alomari, A.; Aslam, N.; Comeau, F. Data collection using rendezvous points and mobile actor in wireless sensor networks. In Proceedings of the IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 7115–7119. [Google Scholar]
- Alomari, A.; Aslam, N.; Phillips, W.; Comeau, F. A scheme for using closest rendezvous points and Mobile Elements for data gathering in wireless sensor networks. In Proceedings of the 2014 IFIP Wireless Days (WD), Rio de Janeiro, Brazil, 12–14 November 2014; pp. 1–6. [Google Scholar]
- Koutsonikolas, D.; Das, S.M.; Hu, Y.C. Path Planning of Mobile Landmarks for Localization in Wireless Sensor Networks. Comput. Commun. 2007, 30, 2577–2592. [Google Scholar] [CrossRef]
- Huang, R.; Zaruba, G.V. Static Path Planning for Mobile Beacons to Localize Sensor Networks. In Proceedings of the 5th Annual IEEE International Conference on Pervasive Computing and Communications Workshops, White Plains, NY, USA, 19–23 March 2007; pp. 323–330. [Google Scholar]
- Han, G.; Zhang, C.; Lloret, J.; Shu, L.; Rodrigues, J. A Mobile Anchor Assisted Localization Algorithm Based on Regular Hexagon in Wireless Sensor Networks. Sci. World J. 2014, 2014, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Lowe, D.; Kong, X.; Braun, R. Wireless sensor network localization algorithm using dynamic path of mobile beacon. In Proceedings of the 17th Asia Pacific Conference on Communications, Sabah, Malaysia, 2–5 October 2011; pp. 344–349. [Google Scholar]
- Alomari, A.; Aslam, N.; Phillips, W.; Comeau, F. Using the DV-Hop technique to increase the localization ratio in static path planning models in wireless sensor networks. In Proceedings of the 10th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Prague, Czech Republic, 20–22 July 2016; pp. 1–6. [Google Scholar]
- Chen, Y.; Lu, S.; Chen, J.; Ren, T. Node localization algorithm of wireless sensor networks with mobile beacon node. Peer Peer Netw. Appl. 2017, 10, 795–807. [Google Scholar] [CrossRef]
- Rezazadeh, J.; Moradi, M.; Ismail, A.; Dutkiewicz, E. Superior Path Planning Mechanism for Mobile Beacon-Assisted Localization in Wireless Sensor Networks. Sens. J. IEEE 2014, 14, 3052–3064. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Li, X.; Ma, H. Real-time path planning of mobile anchor node in localization for wireless sensor networks. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 384–389. [Google Scholar]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A Survey on Mobile Anchor Node Assisted Localization in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Fuzzy Logic Toolbox™ User’s Guide. 2017. Available online: https://www.mathworks.com/help/pdf_doc/fuzzy/fuzzy.pdf (accessed on 1 June 2017).
- Shah, B.; Iqbal, F.; Abbas, A.; Kim, K.I. Fuzzy Logic-Based Guaranteed Lifetime Protocol for Real-Time Wireless Sensor Networks. Sensors 2015, 15, 20373–20391. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Kulla, E.; Mino, G.; Barolli, L. Prediction of Sensor Lifetime in Wireless Sensor Networks Using Fuzzy Logic. In Proceedings of the 2014 IEEE 28th International Conference on Advanced Information Networking and Applications, Victoria, BC, Canada, 13–16 May 2014; pp. 1127–1131. [Google Scholar]
- Tamandani, Y.K.; Bokhari, M.U. SEPFL routing protocol based on fuzzy logic control to extend the lifetime and throughput of the wireless sensor network. Wirel. Netw. 2016, 22, 647–653. [Google Scholar] [CrossRef]
- Mhemed, R.; Aslam, N.; Phillips, W.; Comeau, F. An Energy Efficient Fuzzy Logic Cluster Formation Protocol in Wireless Sensor Networks. Procedia Comput. Sci. 2012, 10, 255–262. [Google Scholar] [CrossRef]
- Logambigai, R.; Kannan, A. Fuzzy logic based unequal clustering for wireless sensor networks. Wirel. Netw. 2016, 22, 945–957. [Google Scholar] [CrossRef]
- Nayak, P.; Devulapalli, A. A Fuzzy Logic-Based Clustering Algorithm for WSN to Extend the Network Lifetime. IEEE Sens. J. 2016, 16, 137–144. [Google Scholar] [CrossRef]
- Mirzaie, M.; Mazinani, S.M. MCFL: An Energy Efficient Multi-Clustering Algorithm Using Fuzzy Logic in Wireless Sensor Network. 2017. Available online: https://doi.org/10.1007/s11276-017-1466-5 (accessed on 1 June 2017).
- Zhang, Y.; Wang, J.; Han, D.; Wu, H.; Zhou, R. Fuzzy-Logic Based Distributed Energy-Efficient Clustering Algorithm for Wireless Sensor Networks. Sensors 2017, 17, 1554. [Google Scholar] [CrossRef] [PubMed]
- Collotta, M.; Bello, L.L.; Pau, G. A novel approach for dynamic traffic lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers. Expert Syst. Appl. 2015, 42, 5403–5415. [Google Scholar] [CrossRef]
- Messaoudi, A.; Elkamel, R.; Helali, A.; Bouallegue, R. Distributed fuzzy logic based routing protocol for wireless sensor networks. In Proceedings of the 24th International Conference on Software, Telecommunications and Computer Networks, Split, Croatia, 22–24 September 2016; pp. 1–7. [Google Scholar]
- Ahvar, E.; Ortiz, A.M.; Crespi, N. Improving Decision-Making for Fuzzy Logic-Based Routing in Wireless Sensor Networks. In Proceedings of the IEEE 10th International Conference on Ubiquitous Intelligence and Computing, Vietri sul Mere, Italy, 19–21 December 2013; pp. 583–588. [Google Scholar]
- Ortiz, A.M.; Royo, F.; Olivares, T.; Castillo, J.C.; Orozco-Barbosa, L.; Marron, P.J. Fuzzy-logic based routing for dense wireless sensor networks. Telecommun. Syst. 2013, 52, 2687–2697. [Google Scholar] [CrossRef]
- Jiang, H.; Sun, Y.; Sun, R.; Xu, H. Fuzzy-Logic-Based Energy Optimized Routing for Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2013, 9, 216561. [Google Scholar] [CrossRef]
- Mondal, K.; Karmakar, A.; Mandal, P.S. Path planning algorithms for mobile anchors towards range-free localization. J. Parallel Distrib. Comput. 2016, 97, 35–46. [Google Scholar] [CrossRef]
- Understanding RSSI. 2017. Available online: http://www.metageek.com/training/resources/understanding-rssi.html (accessed on 30 May 2017).
- Parwekar, P.; Reddy, R. An efficient fuzzy localization approach in Wireless Sensor Networks. In Proceedings of the IEEE International Conference on Fuzzy Systems, Hyderabad, India, 7–10 July 2013; pp. 1–6. [Google Scholar]
- Dong, Q.; Xu, X. A Novel Weighted Centroid Localization Algorithm Based on RSSI for an Outdoor Environment. J. Commun. 2014, 9, 279–285. [Google Scholar] [CrossRef]
- Barua, A.; Mudunuri, L.; Kosheleva, O. Why Trapezoidal and Triangular Membership Functions Work So Well: Towards a Theoretical Explanation. J. Uncertain Syst. 2014, 8, 164–168. [Google Scholar]
- Blumenthal, J.; Grossmann, R.; Golatowski, F.; Timmermann, D. Weighted Centroid Localization in Zigbee-based Sensor Networks. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares, Spain, 3–5 October 2007; pp. 1–6. [Google Scholar]
- CC1100, Low-Power Sub-1 GHz RF Transceiver. 2014. Available online: http://www.chipcon.com (accessed on 10 January 2017).
- Collotta, M.; Pau, G.; Maniscalco, V. A Fuzzy Logic Approach by using Particle Swarm Optimization for Effective Energy Management in IWSNs. IEEE Trans. Ind. Electron. 2017, 1–10. [Google Scholar] [CrossRef]
- Yu, Z.; Xiao, L.; Li, H.; Zhu, X.; Huai, R. Model Parameter Identification for Lithium Batteries Using the Coevolutionary Particle Swarm Optimization Method. IEEE Trans. Ind. Electron. 2017, 64, 5690–5700. [Google Scholar] [CrossRef]
- Elsayed, W.T.; Hegazy, Y.G.; El-bages, M.S.; Bendary, F.M. Improved Random Drift Particle Swarm Optimization with Self-Adaptive Mechanism for Solving the Power Economic Dispatch Problem. IEEE Trans. Ind. Inform. 2017, 13, 1017–1026. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mobility Protocol | Localization Method | Localization Processing | Area | Anchor Type | Movement Path | Movement Constraints | Area Covered | Accuracy |
|---|---|---|---|---|---|---|---|---|
| SCAN | Range-free | Distributed | 2-D | Mobile | Static | No | Yes | Low |
| Hilbert | Range-free | Distributed | 2-D | Mobile | Static | No | Yes | Low |
| CIRCLES | Range-free | Distributed | 2-D | Mobile | Static | No | No | Low |
| MAALRH | Range-free | Distributed | 2-D | Mobile | Static | No | No | Low |
| Z-Curve | Range-free | Distributed | 2-D | Mobile | Static | No | Yes | High |
| LMAT | Range-free | Distributed | 2-D | Mobile | Static | No | Yes | High |
| H-Curves | Range-free | Distributed | 2-D | Mobile | Static | No | Yes | High |
| DPMB | Range-free | Distributed | 2-D | Mobile | Dynamic | No | No | Weak |
| NLA_MB | Range-free | Distributed | 2-D | Mobile | Dynamic | Yes | Differs | High |
| Input | Membership Function | ||
|---|---|---|---|
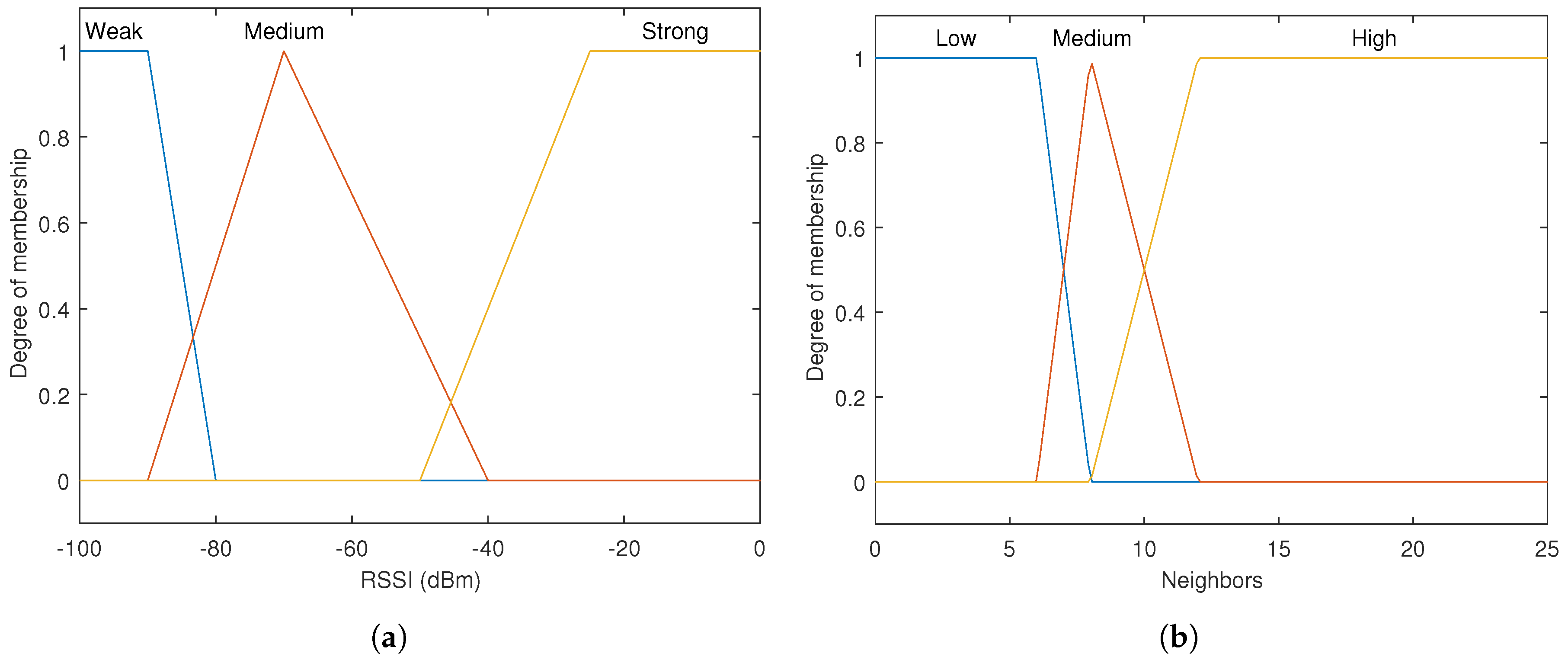
| RSSI Level | Weak | Medium | Strong |
| Number of Neighbours | Low | Medium | High |
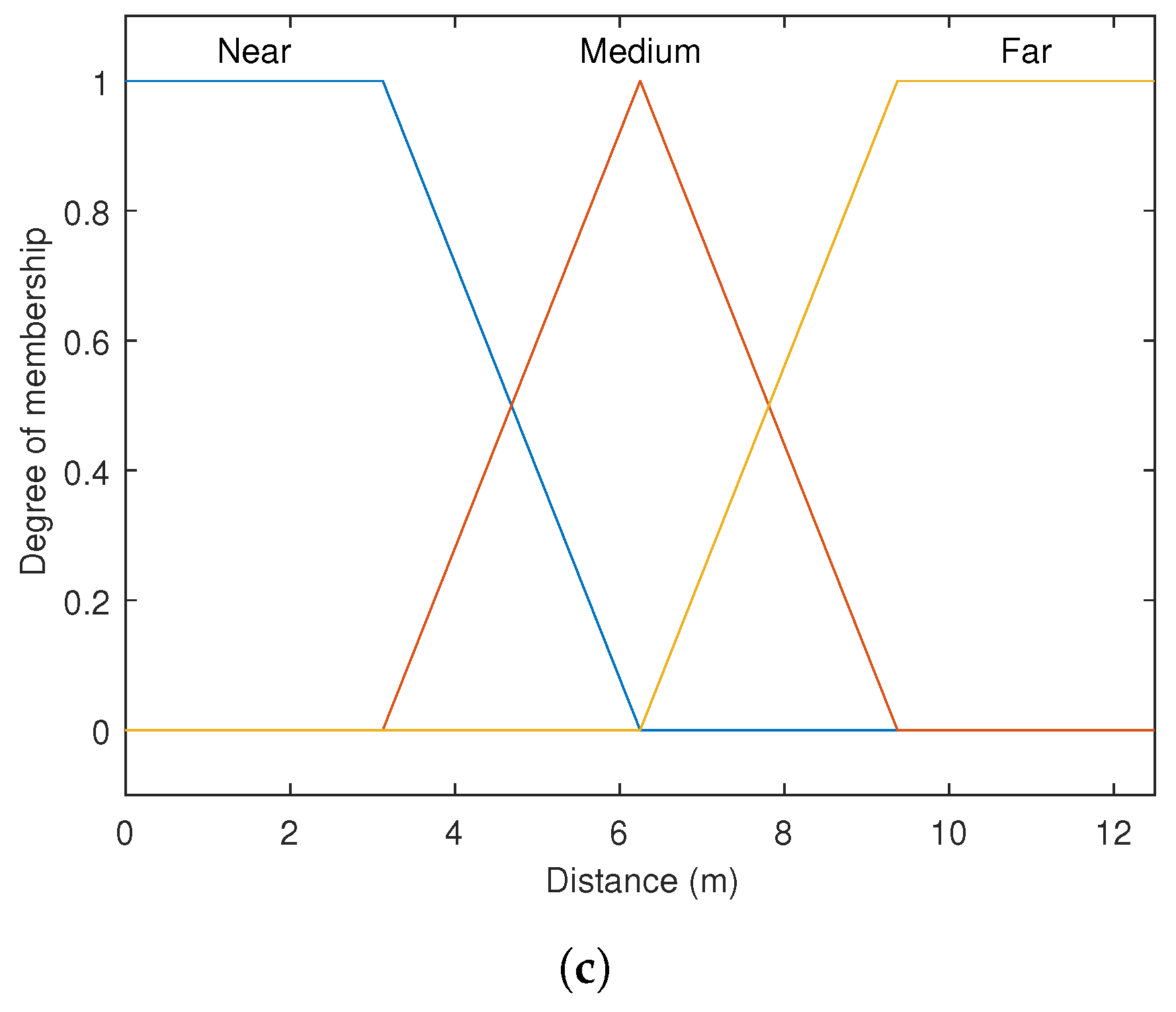
| Distance to each neighbour | Near | Medium | Far |
| N_Id | Type | Neighbours_# | Neighbours_Ids | Neighbours_Types | Neighbours_RSSI |
|---|---|---|---|---|---|
| 20 | 0 | 3 |
| RSSI | Neighbours | Distance |
|---|---|---|
| Weak: [−102 −100 −90 −70] | Low: [−0.5 0 6 8] | Near: [−0.25 0 3.125 6.25] |
| Medium: [−90 −70 −30] | Medium: [6 8 12] | Medium: [3.125 6.25 9.375] |
| Strong: [−70 0 2] | High: [8 12 25 25.5] | Far: [6.25 9.375 12.5 12.75] |
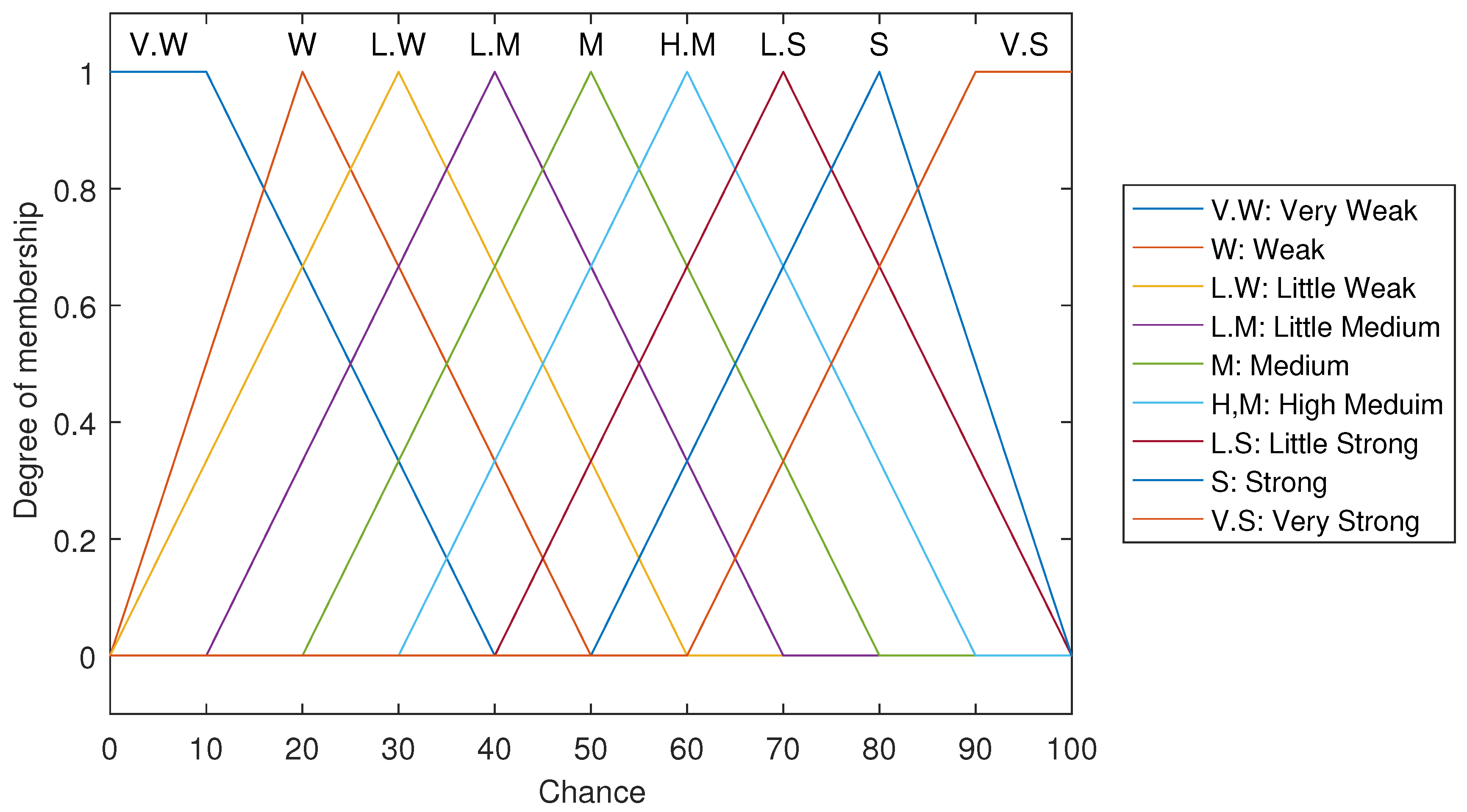
| Output | Membership Functions |
|---|---|
| Very Weak | |
| Weak | |
| Little Weak | |
| Little Medium | |
| Chance | Medium |
| High Medium | |
| Little Strong | |
| Strong | |
| Very Strong |
| RSSI | Neighbours | Distance | Chance |
|---|---|---|---|
| Weak | Low | Far | Very Weak |
| Weak | Low | Medium | Weak |
| Weak | Low | Near | Little Weak |
| Weak | Medium | Far | Weak |
| Weak | Medium | Medium | Little Weak |
| Weak | Medium | Near | Little Medium |
| Weak | High | Far | Little Weak |
| Weak | High | Medium | Little Medium |
| Weak | High | Near | Medium |
| Medium | Low | Far | Little Weak |
| Medium | Low | Medium | Little Medium |
| Medium | Low | Near | Medium |
| Medium | Medium | Far | Little Medium |
| Medium | Medium | Medium | Medium |
| Medium | Medium | Near | High Medium |
| Medium | High | Far | Medium |
| Medium | High | Medium | High Medium |
| Medium | High | Near | Little Strong |
| Strong | Low | Far | Medium |
| Strong | Low | Medium | High Medium |
| Strong | Low | Near | Little Strong |
| Strong | Medium | Far | High Medium |
| Strong | Medium | Medium | Little Strong |
| Strong | Medium | Near | Strong |
| Strong | High | Far | Little Strong |
| Strong | High | Medium | Strong |
| Strong | High | Near | Very Strong |
| Parameters | Symbol | Value |
|---|---|---|
| Network size (m) | S | 100 × 100 |
| Number of mobile anchors | M | 1 |
| Number of unknown nodes | N | 250 |
| Maximum movement distance (m) | 35, 70, 105, 140, 175 | |
| Path loss exponent | 3.5 | |
| Power loss () at | () | −60 |
| Reference point (m) | 1 | |
| Standard deviation of noise | 3, 5, 7, 9 | |
| Simulation run | 50 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alomari, A.; Phillips, W.; Aslam, N.; Comeau, F. Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks. Sensors 2017, 17, 1904. https://doi.org/10.3390/s17081904
Alomari A, Phillips W, Aslam N, Comeau F. Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks. Sensors. 2017; 17(8):1904. https://doi.org/10.3390/s17081904
Chicago/Turabian StyleAlomari, Abdullah, William Phillips, Nauman Aslam, and Frank Comeau. 2017. "Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks" Sensors 17, no. 8: 1904. https://doi.org/10.3390/s17081904
APA StyleAlomari, A., Phillips, W., Aslam, N., & Comeau, F. (2017). Dynamic Fuzzy-Logic Based Path Planning for Mobility-Assisted Localization in Wireless Sensor Networks. Sensors, 17(8), 1904. https://doi.org/10.3390/s17081904