Analysis of Multi-Level Simultaneous Driving Technique for Capacitive Touch Sensors


Abstract
:1. Introduction
2. Capacitive Touch Sensing System
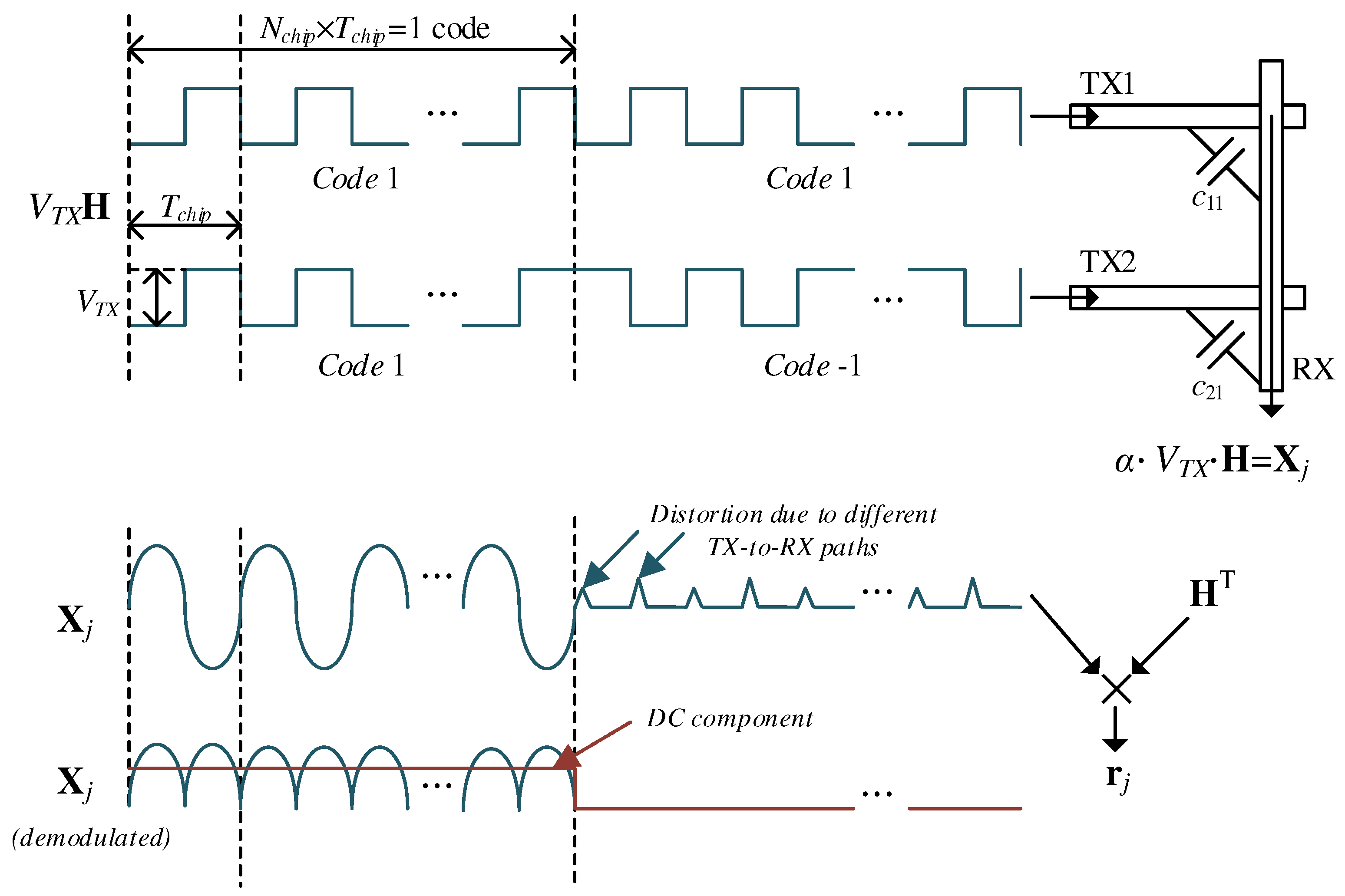
2.1. System Model
2.2. Random Noise Components for Capacitive Touch Sensors
3. Multi-Level Sequences for Capacitive Sensors
4. Results and Discussion
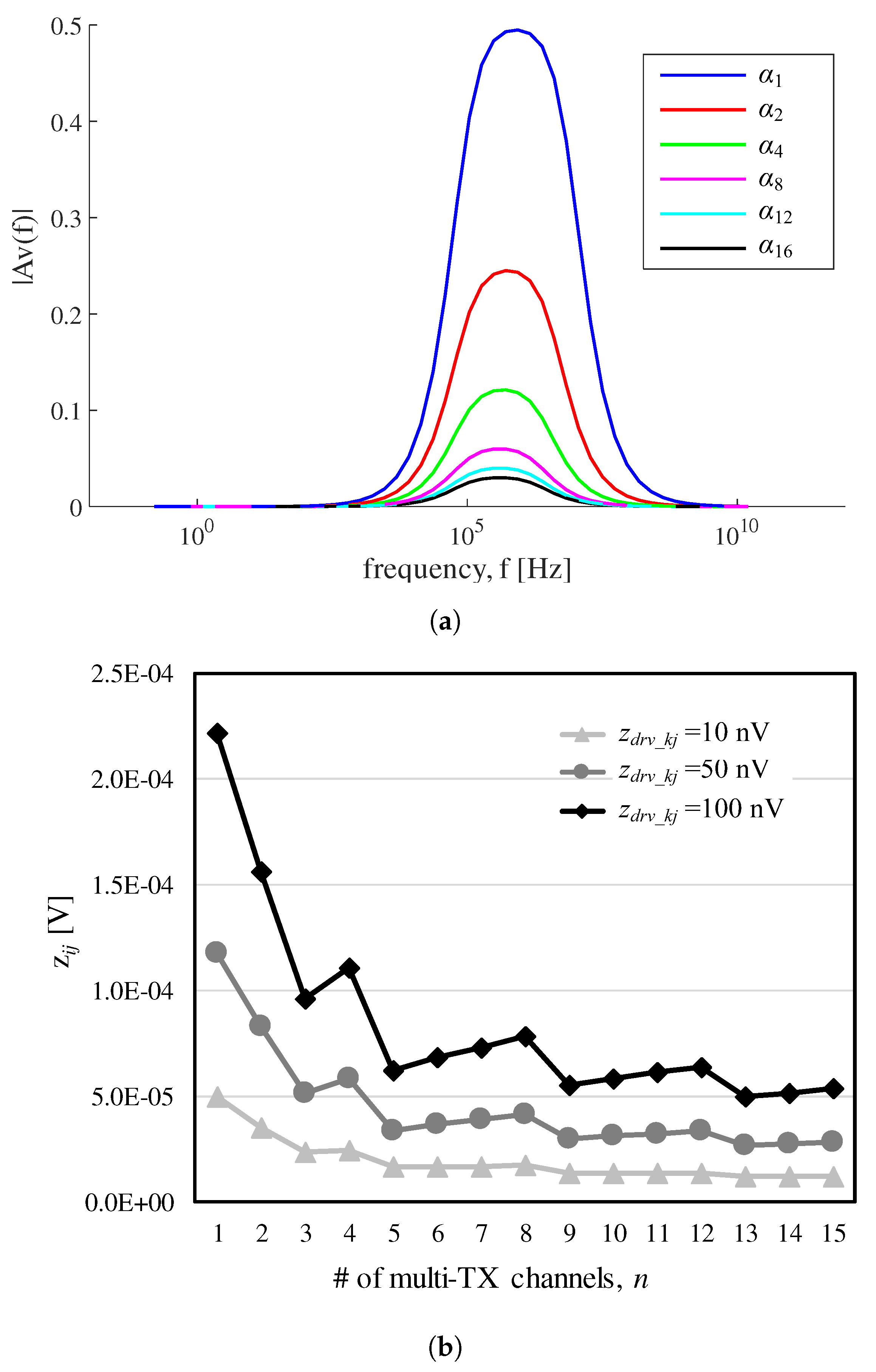
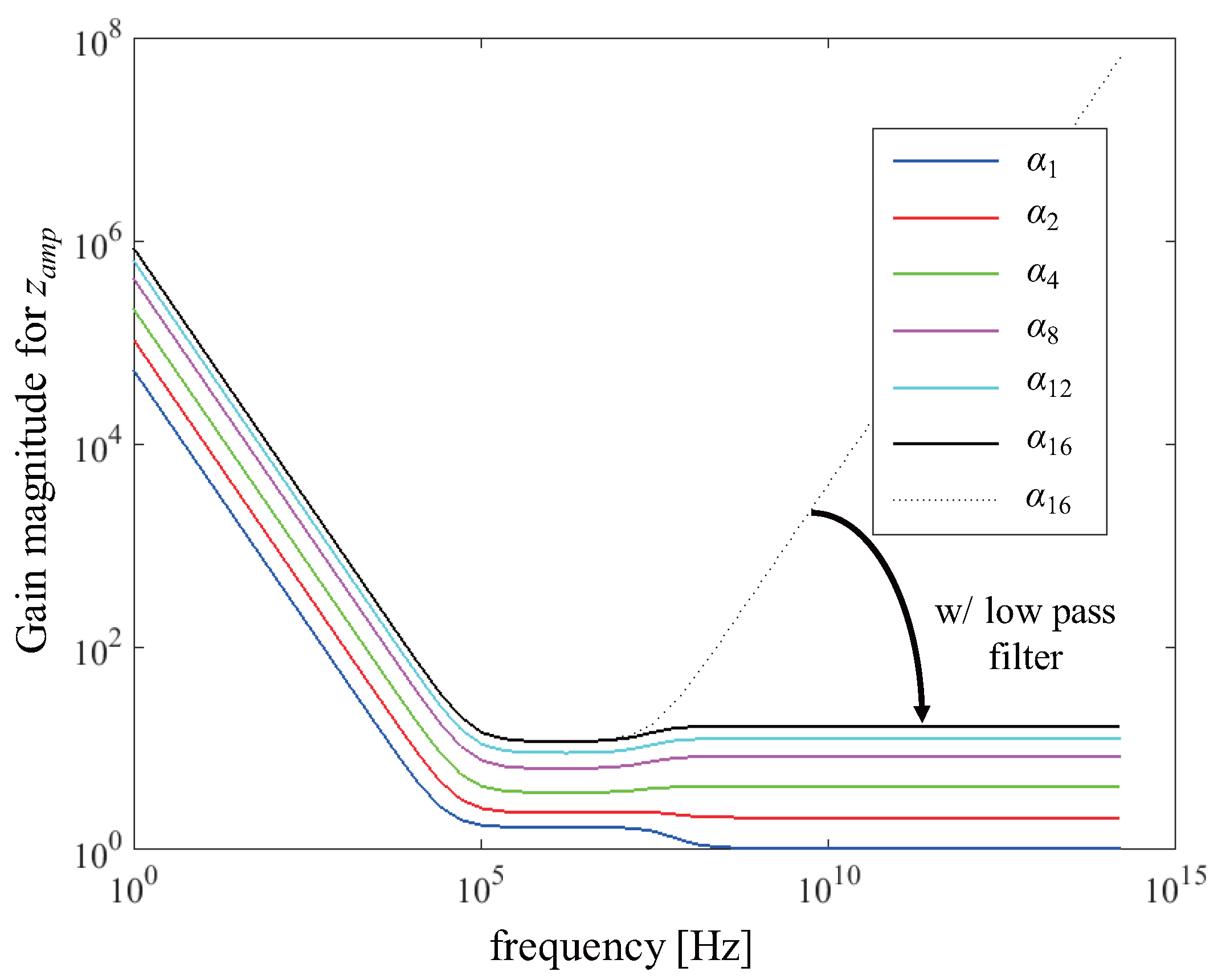
4.1. Simulation Results with Constant
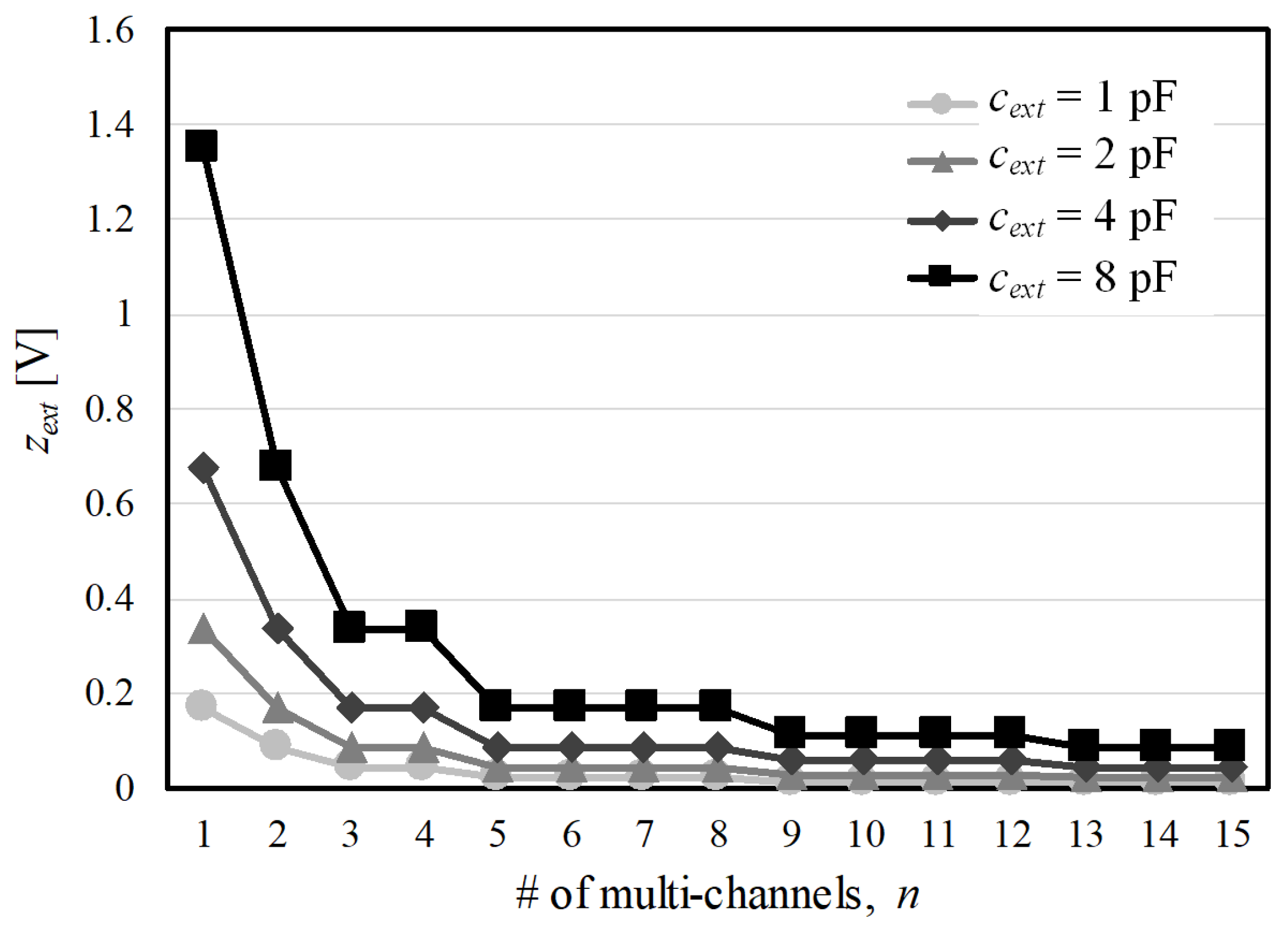
4.2. Variation with Respect to n
4.3. Implementation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Park, J.K.; Lee, C.-J.; Kim, D.-Y.; Chun, J.-H.; Kim, J.T. Application of weighing matrices to simultaneous driving technique for capacitive touch sensors. IEEE Trans. Consum. Electron. 2015, 61, 261–269. [Google Scholar] [CrossRef]
- Gamal, M.; Mohamed, A.; Kim, H.W. Concurrent Driving Method with Fast Scan Rate for Large Mutual Capacitance Touch Screens. J. Sens. 2015, 2015, 768293. [Google Scholar] [CrossRef]
- Park, J.Y.; Park, J.K.; Lee, C.-J.; Kim, J.T. Inverted driving technique for removing display noise in capacitive touch sensors. IEICE Electron. Exp. 2015, 12, 1–6. [Google Scholar] [CrossRef]
- Yang, I.-S.; Kwon, O.-K. A touch controller using differential sensing method for on-cell capacitive touch screen panel systems. IEEE Trans. Consum. Electron. 2011, 58, 1027–1032. [Google Scholar] [CrossRef]
- Kim, K.-D.; Byun, S.-H.; Choi, Y.-K.; Baek, J.-H.; Cho, H.-H.; Park, J. K.; Ahn, H.-Y.; Lee, C.-J.; Cho, M.-S.; Lee, J.-H.; et al. A capacitive touch controller robust to display noise for ultrathin touch screen displays. In Proceedings of the 2012 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 19–23 February 2012; pp. 116–117. [Google Scholar]
- Trinh, Q.K.; Fan, P.; Gabidulin, E.M. Multi-level Hadamard matrices and zero correlation zone sequences. Electron. Lett. 2006, 42, 748–750. [Google Scholar] [CrossRef]
- Darnell, M.; Kemp, A. Synthesis of multilevel complementary sequences. Electron. Lett. 1988, 24, 1251–1252. [Google Scholar] [CrossRef]
- Park, J.K.; Woo, T.-G.; Kim, M.; Kim, J.T. Hadamard Matrices Design for Low-cost Indoor Positioning System in Visible Light Communication. IEEE Photonics J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Heo, S.; Ma, H.; Bien, F. An Excessive Current Subtraction Technique to Improve Dynamic Range for Touch Screen Panel Applications. J. Semicond. Technol. Sci. 2016, 375–379. [Google Scholar] [CrossRef]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240 Hz frame scan rate mutual capacitor 32 × 24 touch-screen panel read-out IC using code-division multiple sensing technique. In Proceedings of the 2013 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 17–21 February 2013; pp. 388–389. [Google Scholar]
- Ko, S.; Shin, H.; Jang, H.; Yun, I.; Lee, K. A 70 dB SNR capacitive touch screen panel readout IC using capacitor-less trans-impedance amplifier and coded Orthogonal Frequency-Division Multiple Sensing scheme. In Proceedings of the 2013 Symposium on VLSI Circuits (VLSIC), Kyoto, Japan, 12–14 June 2013. [Google Scholar]
- Park, Y.; Bae, J.; Kim, E.; Park, T. Maximizing responsiveness of touch sensing via charge multiplexing in touchscreen devices. IEEE Trans. Consum. Electron. 2010, 56, 1905–1910. [Google Scholar] [CrossRef]
- Hotelling, S.P.; Elias, J.G.; Sakariya, K.V. Simultaneous Sensing Arrangement. U.S. Patent 7,812,827, 12 October 2010. [Google Scholar]
- Smith, J.R.; Salthouse, C.; Gershenfeld, N. Code division multiplexing of a sensor channel: A software implementation. IEEE J. Sel. Areas Commun. 1999, 17, 725–731. [Google Scholar] [CrossRef]
- Leigh, D.; Forlines, C.; Jota, R.; Sanders, S.; Wigdor, D. High rate, low-latency multi-touch sensing with simultaneous orthogonal multiplexing. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5–8 October 2014; pp. 355–364. [Google Scholar]
- Faith, T.; Haas, H. Performance Comparison of MIMO Techniques for Optical Wireless Communications in Indoor Environments. IEEE Trans. Commun. 2013, 61, 733–742. [Google Scholar] [CrossRef]
- Akkoç, F.; Şahin, O.C. Development and Experimental Comparison of Low-Cost, Reliable Capacitive Touch Sensing Boards. Sensors 2016, 16, 1786. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-L.; Chang, Y.-M.; Hung, C.-C.; Tu, C.-D.; Chuang, C.-Y. Position Estimation and Smooth Tracking With a Fuzzy-Logic-Based Adaptive Strong Tracking Kalman Filter for Capacitive Touch Panels. IEEE Trans. Ind. Electron. 2015, 62, 5097–5108. [Google Scholar] [CrossRef]
- Gao, S.; Lai, J.; Micou, C.; Nathan, A. Reduction of Common Mode Noise and Global Multivalued Offset in Touch Screen Systems by Correlated Double Sampling. IEEE J. Disp. Technol. 2016, 12, 639–644. [Google Scholar] [CrossRef]
- Wu, X.; Heo, H.; Liu, G.; Lee, B.; Li, J.; Shu, L.; Zhang, X.; Lee, S. Touchware: A software-based technique for high-resolution multi-touch sensing devices. Int. J. Ad Hoc and Ubiquitous Comput. 2014, 17, 18–30. [Google Scholar] [CrossRef]
- Spieler, H. Measurements—III Electronic Noise; International Committee for Future Accelerators (ICFA) Instrumentation School: Istanbul, Turkey, 2002. [Google Scholar]
- Hansen, S.K.E. Design and Experimental Investigation of Charge Amplifiers for Ultrasonic Transducers. Master’s Thesis, Arctic University, Tromso, Norway, 2014. [Google Scholar]
- Carter, B. Chapter 10: Op Amp Noise Theory and Applications; SLOA082; Texas Instruments: Dallas, TX, USA, 2008. [Google Scholar]
- Hamamatsu Photonics. Characteristics and Use of Charge Amplifier; Technical Information SD-37; Hamamatsu Photonics: Hamamatsu, Japan, 2001. [Google Scholar]
- Hussain, B.; Li, X.; Che, F.; Yue, C.P.; Wu, L. Visible Light Communication System Design and Link Budget Analysis. IEEE J. Lightwave Technol. 2014, 33, 5201–5209. [Google Scholar] [CrossRef]
- Alberto, L.-G. Chapter 5 sums of random variables and long-term averages. In Probability and Random Processes for Electrical Engineering, 2nd ed.; Addison Wesley Publishing Company: Boston, MA, USA, 1994; pp. 270–272. ISBN 0-201-50037-X. [Google Scholar]
- An, J.S.; Jung, S.-J.; Hong, S.-K.; Kwon, O.-K. A Highly Noise-Immune Capacitive Touch Sensing System Using an Adaptive Chopper Stabilization Method. IEEE Sens. J. 2017, 17, 803–811. [Google Scholar] [CrossRef]
- Colbourn, C.J.; Dinitz, J.H. Part V Hadamard Matrices and Related Designs. In Handbook of Combinatorial Designs, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2006; pp. 273–280. ISBN 1-58488-506-8. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | SNR for [dB] | SNR for [dB] | Normalized () | Observed [mV] | Model for | Model Error for [%] |
|---|---|---|---|---|---|---|
| , Fully-muxed | 54.5 | 40.3 | 1.0 | 0.191 | 2.3 | |
| , W-H | 57.2 | 43.0 | 1.0 | 0.199 | 2.1 | |
| , | 60.9 | 47.7 | 1.0 | 0.210 | 4.0 | |
| , | 59.6 | 47.2 | 1.0 | 0.213 | 2.1 | |
| , W-H | 58.7 | 44.7 | 0.5 | 0.116 | 0.2 | |
| , | 62.7 | 49.2 | 1.0 | 0.222 | 3.1 | |
| , | 58.8 | 45.9 | 1.0 | 0.220 | 0.6 | |
| , | 60.7 | 49.2 | 1.0 | 0.236 | 6.5 | |
| , W-H | 56.7 | 42.4 | 0.25 | 0.122 | 0.7 | |
| , | 63.8 | 51.7 | 0.5 | 0.133 | 1.6 | |
| , | 63.7 | 50.9 | 0.5 | 0.137 | 2.6 | |
| , | 67.8 | 54.0 | 0.5 | 0.139 | 5.0 | |
| , | 69.3 | 54.8 | 0.5 | 0.141 | 3.5 |
| Code | Max. Column Sum (m) | SNR() [dB] | SNR() [dB] | Scan Rate b [Hz] | Max. TX [V] |
|---|---|---|---|---|---|
| , M-H a | 5 | 65.9 | 52.1 | 600 | 4.3 |
| , M-H a | 4 | 63.9 | 50.2 | 600 | 4.0 |
| , tuned H | 5 | 64.0 | 50.1 | 563 | 3.4 |
| , fully muxed | 1 | 54.5 | 40.3 | 600 | 3.4 |
| , fully muxed | 2 | 60.3 | 46.1 | 600 | 4.3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.K.; Lee, C.-J.; Kim, J.T. Analysis of Multi-Level Simultaneous Driving Technique for Capacitive Touch Sensors. Sensors 2017, 17, 2016. https://doi.org/10.3390/s17092016
Park JK, Lee C-J, Kim JT. Analysis of Multi-Level Simultaneous Driving Technique for Capacitive Touch Sensors. Sensors. 2017; 17(9):2016. https://doi.org/10.3390/s17092016
Chicago/Turabian StylePark, Jong Kang, Chang-Ju Lee, and Jong Tae Kim. 2017. "Analysis of Multi-Level Simultaneous Driving Technique for Capacitive Touch Sensors" Sensors 17, no. 9: 2016. https://doi.org/10.3390/s17092016
APA StylePark, J. K., Lee, C. -J., & Kim, J. T. (2017). Analysis of Multi-Level Simultaneous Driving Technique for Capacitive Touch Sensors. Sensors, 17(9), 2016. https://doi.org/10.3390/s17092016