A Stereo Dual-Channel Dynamic Programming Algorithm for UAV Image Stitching

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
2. Methodology
2.1. Duplaquet Algorithm
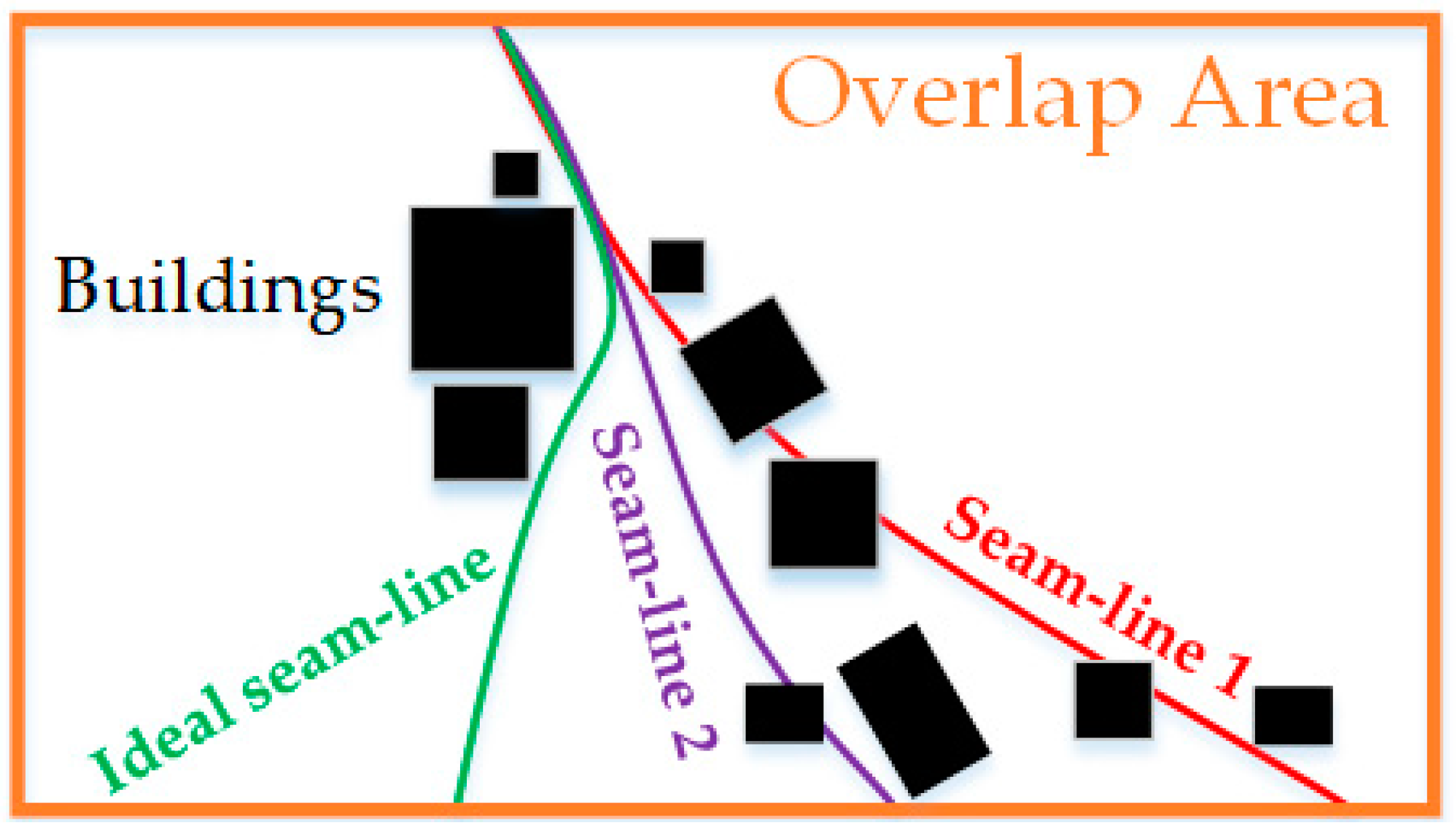
2.2. Problems Analysis
2.3. Our Algorithm
2.3.1. Gradient Calculation
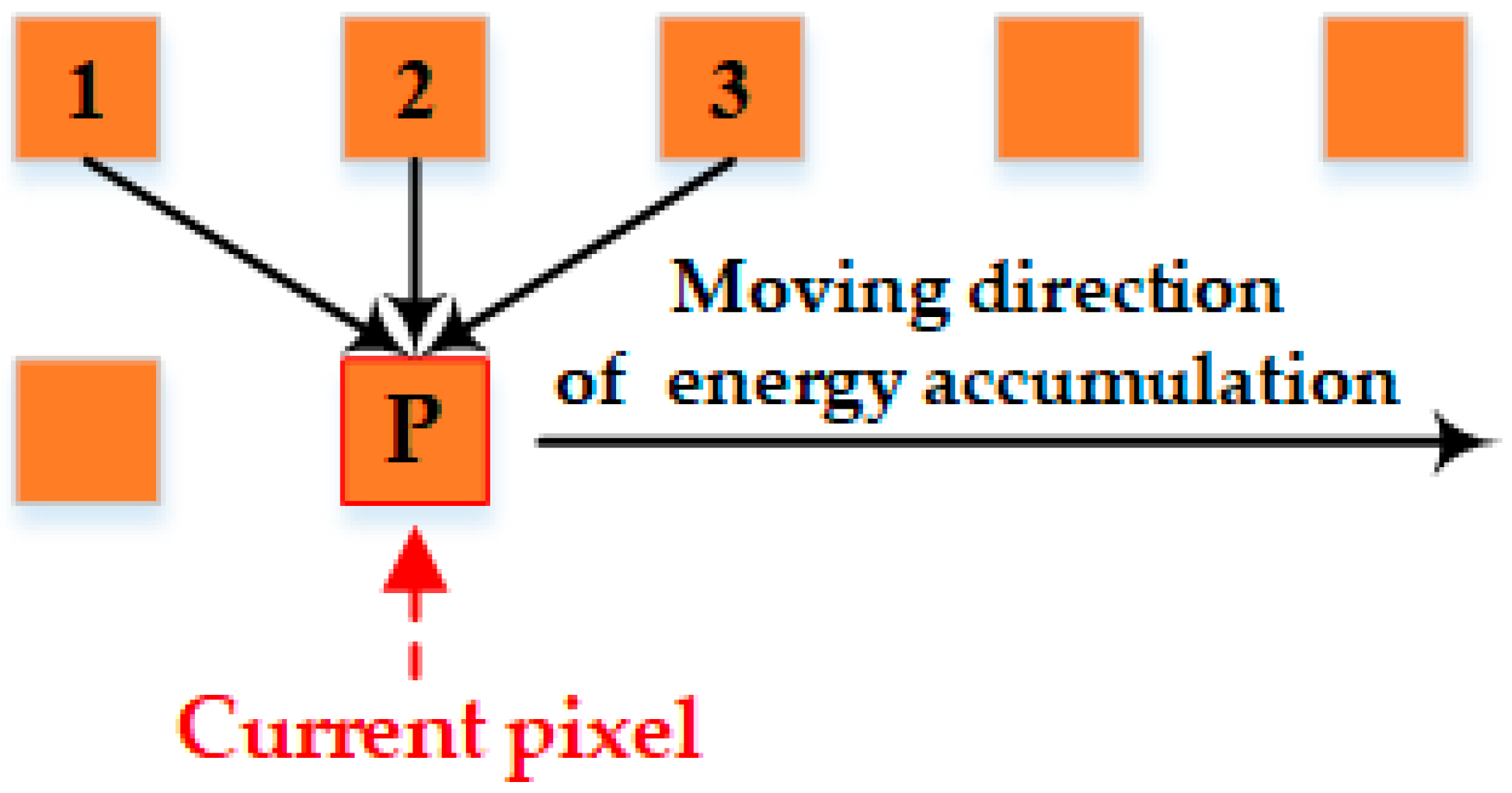
2.3.2. Directionality of Energy Accumulation
2.3.3. The Energy Function
2.3.4. Computation Procedure
- (1)
- Extract the corresponding points from the adjacent images in order to correct the left and right pending matching images to the virtual unified reference image, so that the images are in the same coordinate system.
- (2)
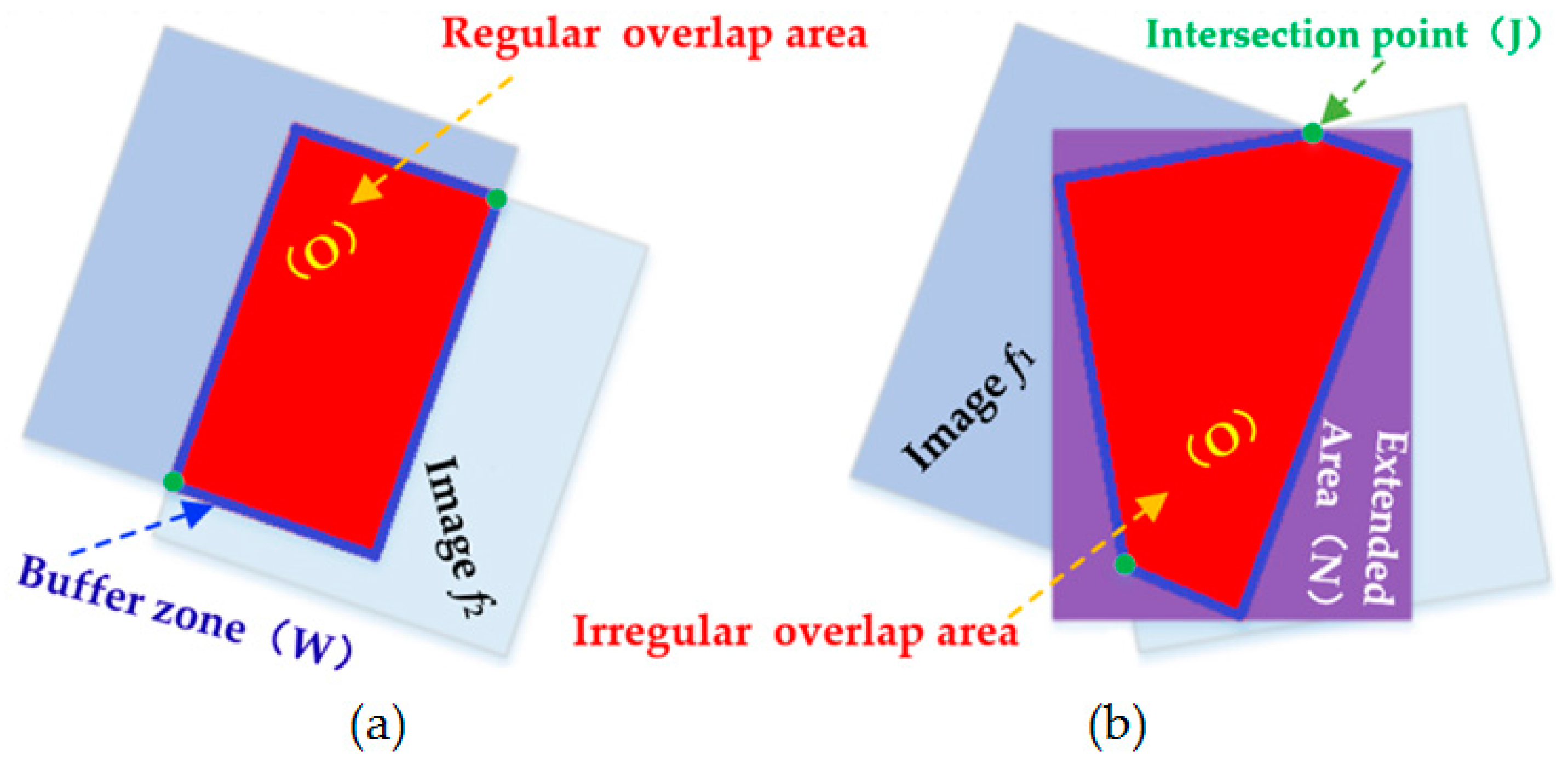
- Define the overlapping area of the adjacent images O, the boundary buffer area W (set its width value is 20 pixels), and W is an empirical value, the invalid area N (extend area), and the boundary intersection J.
- (3)
- Calculate the matrices O, W, N according to Equation (4), where W [1, 10], the closer to the boundary, the larger the value is, and set N = 100 × max(O); J = −1000 × max(O).
- (4)
- Fill the energy matrix E according to the results of (3).
- (5)
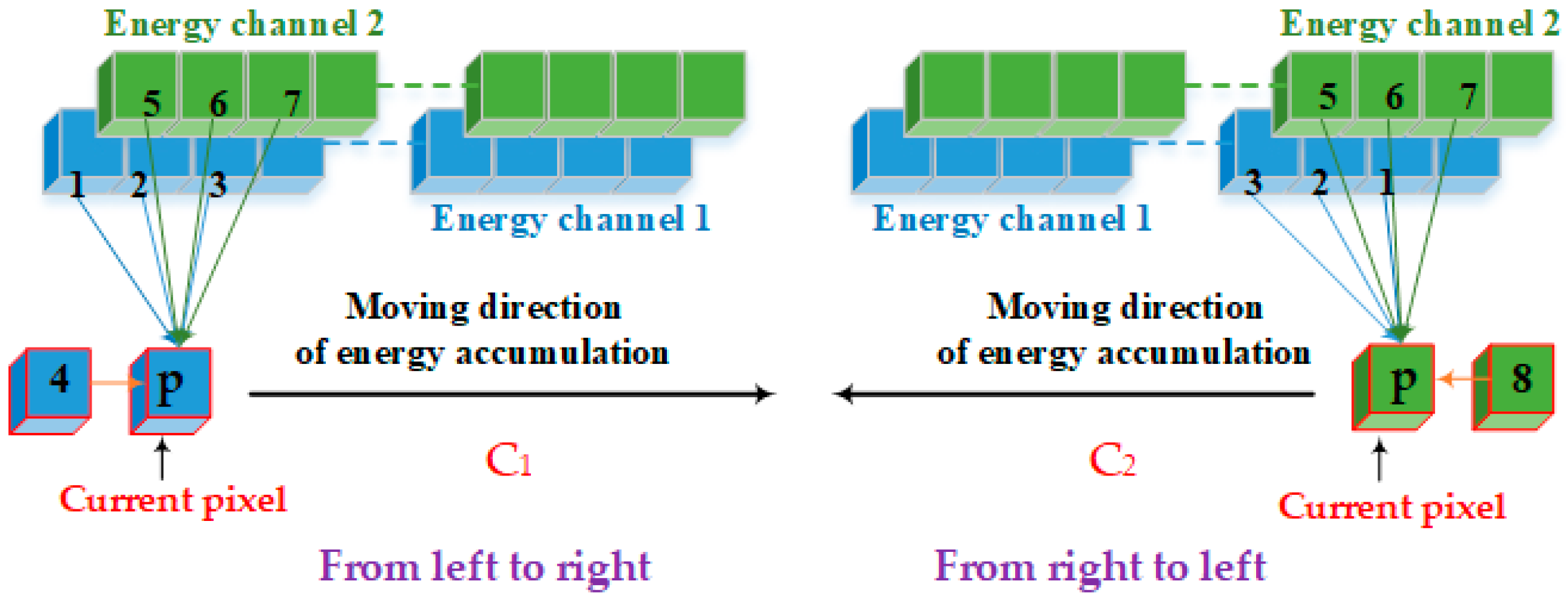
- Reestablish two energy aggregation channels: the C1 and C2 matrices, which have the same size as E; each pair of corresponding elements in these two matrices hold two scalar numbers representing the current aggregation value and the current path direction of the seam line.
- (6)
- For the first row of the energy aggregation channel matrix assigned with the first row of E as the initial value, set its corresponding direction as 0.
- (7)
- The energy aggregation channel matrix starts to make a difference from the second row, which is divided into two aggregation processes from left to right and from right to left. For the energy aggregation channel C1, its aggregation process is from the left to the right; the current pixel only considers the directions of 1, 2, 3, 4, 5, 6, and 7. For the energy aggregation channel C2, its aggregation process is from the right to the left, and the current pixel only considers the directions of 1, 2, 3, 5, 6, 7, and 8.
- (8)
- When the aggregation is completed, the minimum energy value is found from the last row in C1 and C2 respectively; an optimal stitching path is then found based on the direction information stored in the matrixes.
3. Experiments and Analysis
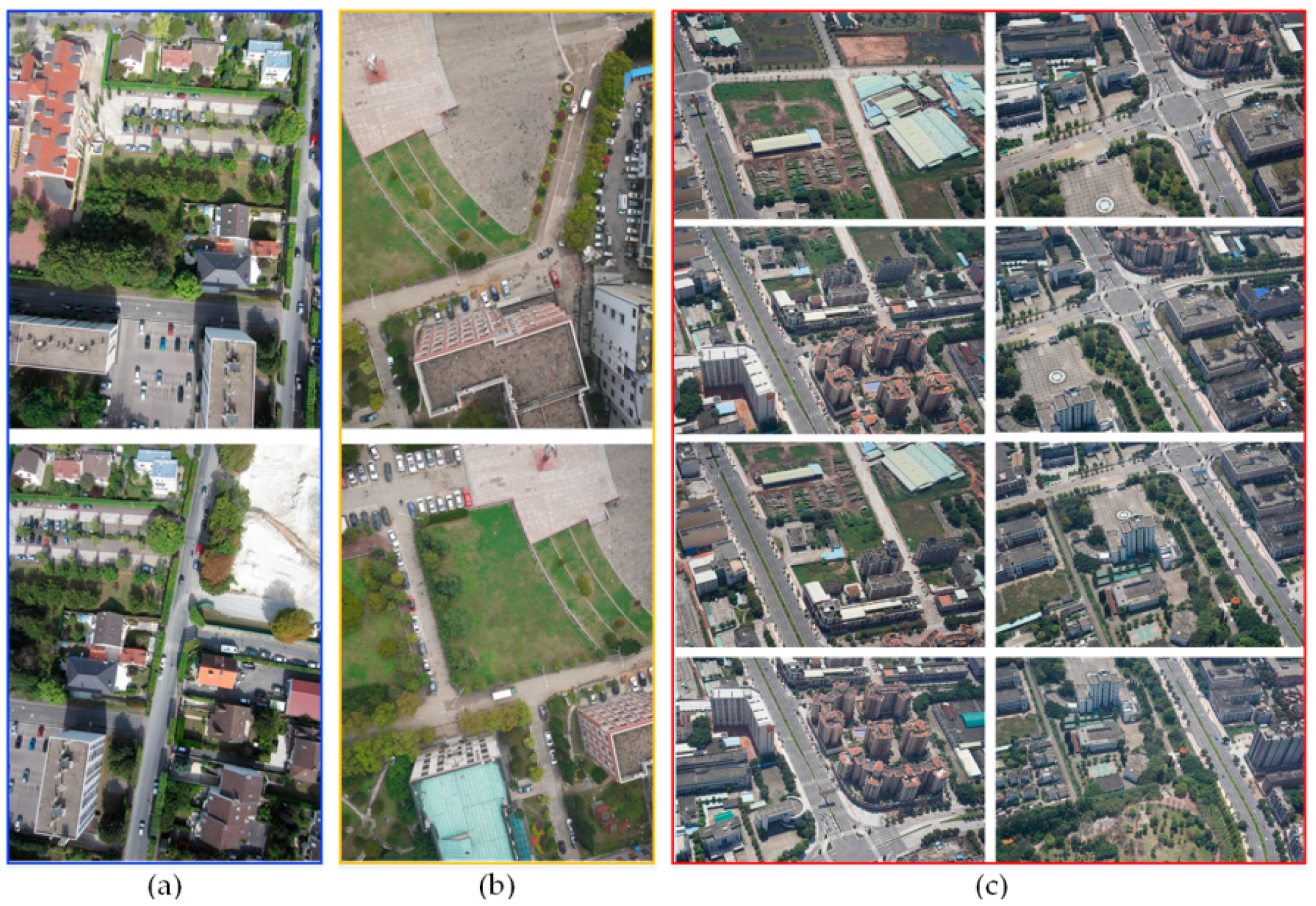
3.1. Experimental Environment and Data
3.2. Results Analysis
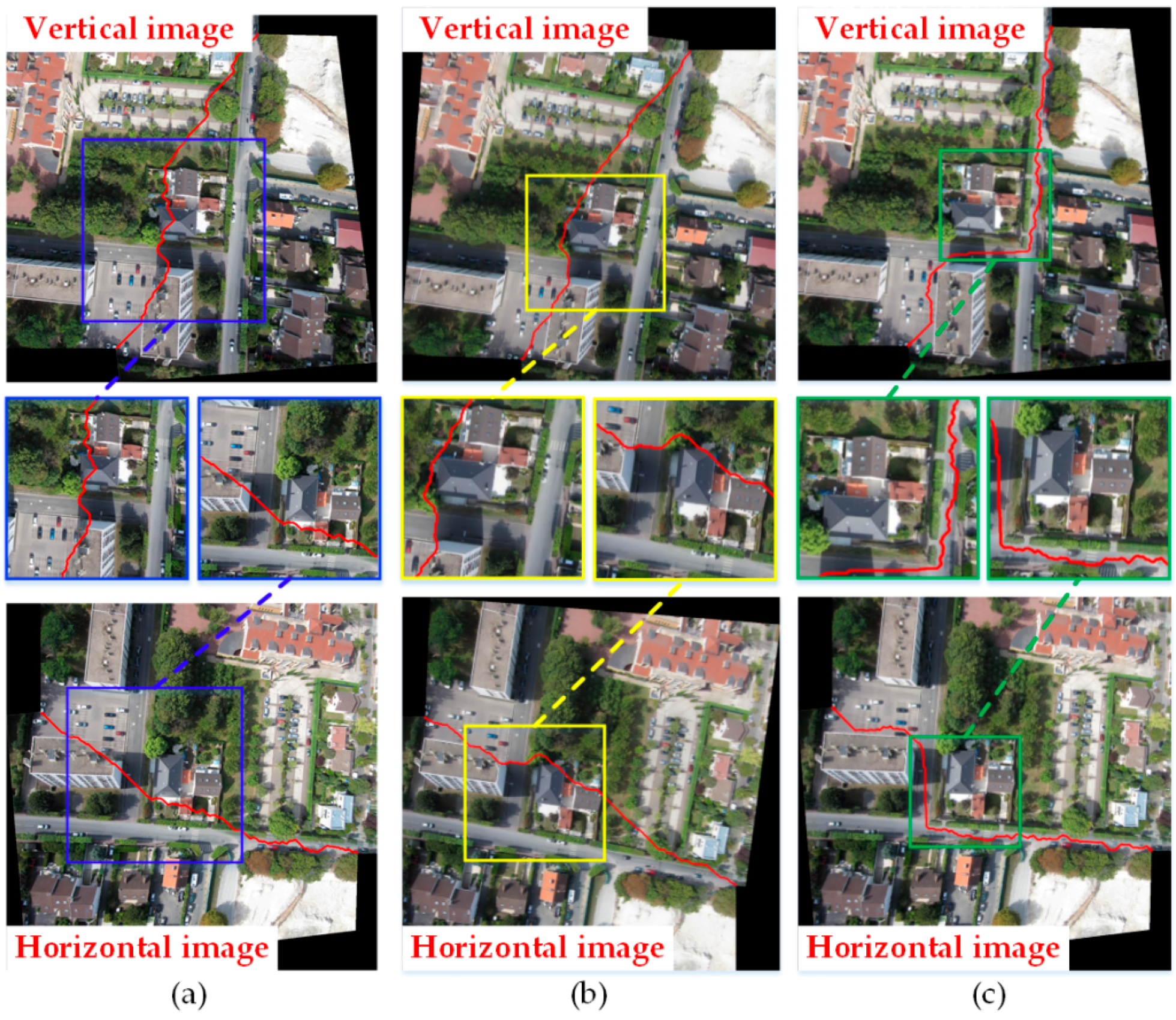
3.2.1. Comparison of Three Algorithms under the Condition of Image Rotation
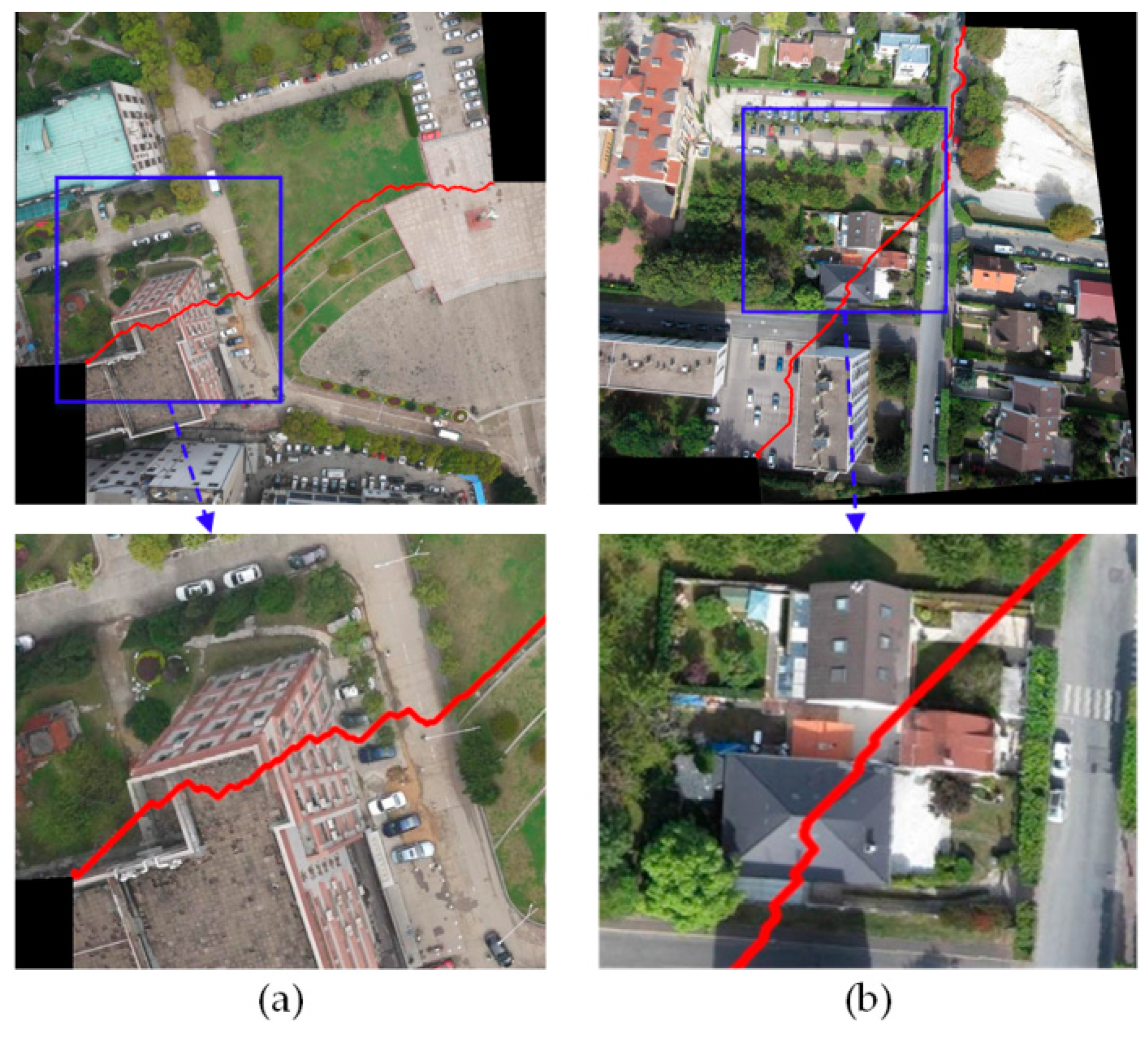
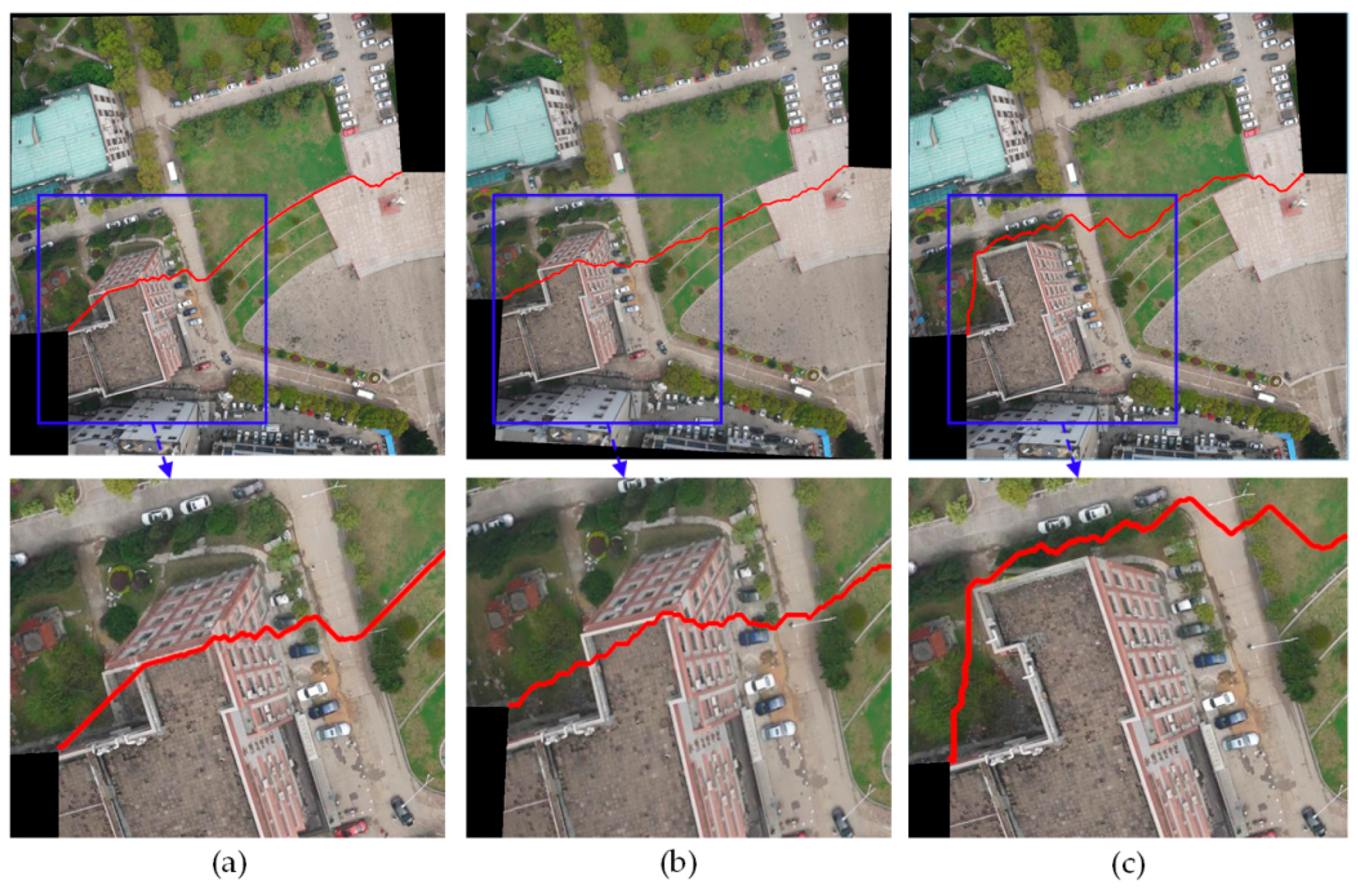
3.2.2. Comparison of Stitching Results with Two Groups of Image Pairs
3.2.3. Stitching with an Image Sequence
3.2.4. Comparing the Efficiency of Energy Accumulation Processing
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, S.; Laefer, D.; Mangina, E. State of technology review of civilian UAVs. Recent Pat. Eng. 2016, 10, 160–174. [Google Scholar] [CrossRef]
- Byrne, J.; Keeffe, E.; Lenon, D.; Laefer, D. 3D reconstructions using unstabilized video footage from an unmanned aerial vehicle. J. Imaging 2017, 3, 15. [Google Scholar] [CrossRef]
- Li, D.; Li, M. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513. [Google Scholar]
- Chen, R.; Chu, T.; Landivar, J.; Yang, C.; Maeda, M. Monitoring cotton (Gossypium hirsutum L.) germination using ultrahigh-resolution UAS images. Precis. Agric. 2017, 18, 1–17. [Google Scholar] [CrossRef]
- Zhang, W.; Li, M.; Guo, B.; Li, D.; Guo, G. Rapid texture optimization of three-dimensional urban model based on oblique images. Sensors 2017, 17, 911. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, D.; Fan, D. A study on automatic UAV image mosaic method for paroxysmal disaster. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B6, 123–128. [Google Scholar] [CrossRef]
- Wang, W.; Michale, K. A variational approach for image stitching. SIAM J. Imaging Sci. 2013, 6, 1318–1344. [Google Scholar] [CrossRef]
- Tao, M.; Johnson, M.; Paris, S. Error tolerant image compositing. Int. J. Comput. Vis. 2013, 103, 178–189. [Google Scholar] [CrossRef]
- Levin, A.; Zomet, A.; Peleg, S. Seamless image stitching in the gradient domain. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004. [Google Scholar]
- Zomet, A.; Levin, A.; Peleg, S.; Weiss, Y. Seamless image stitching by minimizing false edges. IEEE Trans. Image Process. 2006, 15, 969–977. [Google Scholar] [CrossRef] [PubMed]
- Dijkstra, E. A note on two problems in connexion with graphs. Numer. Math. 1995, 1, 269–271. [Google Scholar] [CrossRef]
- Davis, J. Mosaics of scenes with moving objects. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, Santa Barbara, CA, USA, 23–25 June 1998. [Google Scholar]
- Chon, J.; Kim, H.; Lin, C. Seam-line determination for image mosaicking: A mismatch and the global cost. ISPRS J. Photogramm. Remote Sens. 2010, 65, 86–92. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, M.; Zhang, Z. Automated seamline detection for orthophoto mosaicking based on ant colony algorithm. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 675–678. [Google Scholar]
- Gracias, N.; Mahoor, M.; Negahdaripour, S.; Gleason, A. Fast image blending using watersheds and graph cuts. Image Vis. Comput. 2009, 27, 597–607. [Google Scholar] [CrossRef]
- Bielski, C.; Grazzini, J.; Soille, P. Automated morphological image composition for mosaicking large image data sets. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Soille, P. Morphological image compositin. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 673–683. [Google Scholar] [CrossRef] [PubMed]
- Bellman, R. On a routing problem. Q. Appl. Math. 1958, 16, 87–90. [Google Scholar] [CrossRef]
- Duplaquet, L. Building large images mosaics with invisible seam-lines. Proc. SPIE 1998, 3387, 369–377. [Google Scholar]
- Gonzalez, R.; Woods, R. Digital Image Processing, 3rd ed.; Publishing House of Electronics Industry: Beijing, China, 2011. [Google Scholar]
- Cheng, X. Research on Fast Produce of Orthophoto with UAV Sequence Images; Wuhan University: Wuhan, China, 2011. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Pair | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| m = w × h | 957 × 523 | 909 × 421 | 919 × 317 | 923 × 384 | 919 × 335 |
| Location | (Paris) | (Wuhan University) | (Shaxi town) | (Shaxi town) | (Shaxi town) |
| Duplaquet algorithm | 4898 ms | 3572 ms | 2735 ms | 3368 ms | 2854 ms |
| Our algorithm | 91 ms | 69 ms | 54 ms | 68 ms | 54 ms |
| Multiple | 53 | 51 | 50 | 49 | 52 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Chen, R.; Zhang, W.; Li, D.; Liao, X.; Wang, L.; Pan, Y.; Zhang, P. A Stereo Dual-Channel Dynamic Programming Algorithm for UAV Image Stitching. Sensors 2017, 17, 2060. https://doi.org/10.3390/s17092060
Li M, Chen R, Zhang W, Li D, Liao X, Wang L, Pan Y, Zhang P. A Stereo Dual-Channel Dynamic Programming Algorithm for UAV Image Stitching. Sensors. 2017; 17(9):2060. https://doi.org/10.3390/s17092060
Chicago/Turabian StyleLi, Ming, Ruizhi Chen, Weilong Zhang, Deren Li, Xuan Liao, Lei Wang, Yuanjin Pan, and Peng Zhang. 2017. "A Stereo Dual-Channel Dynamic Programming Algorithm for UAV Image Stitching" Sensors 17, no. 9: 2060. https://doi.org/10.3390/s17092060
APA StyleLi, M., Chen, R., Zhang, W., Li, D., Liao, X., Wang, L., Pan, Y., & Zhang, P. (2017). A Stereo Dual-Channel Dynamic Programming Algorithm for UAV Image Stitching. Sensors, 17(9), 2060. https://doi.org/10.3390/s17092060