Accuracy Analysis of a Dam Model from Drone Surveys




Abstract
:1. Introduction
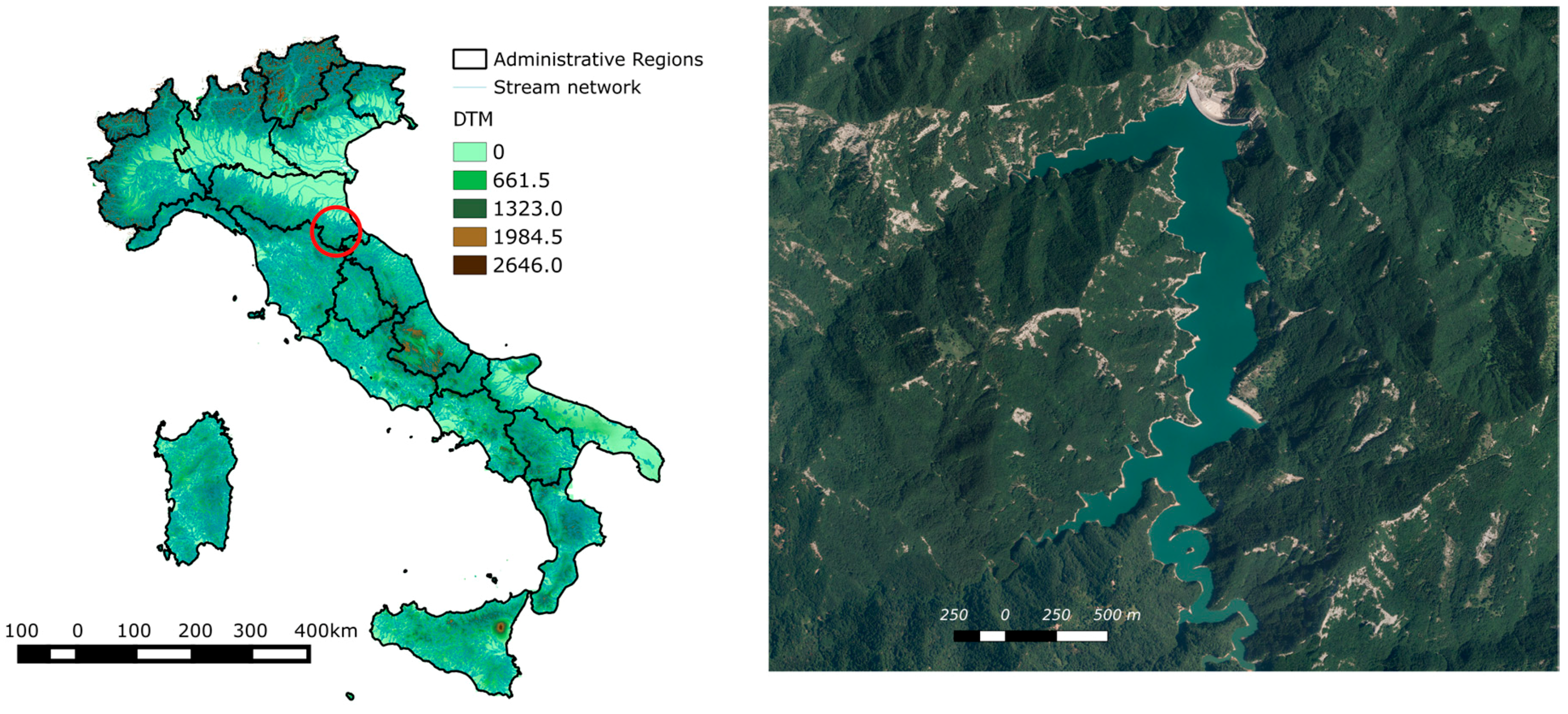
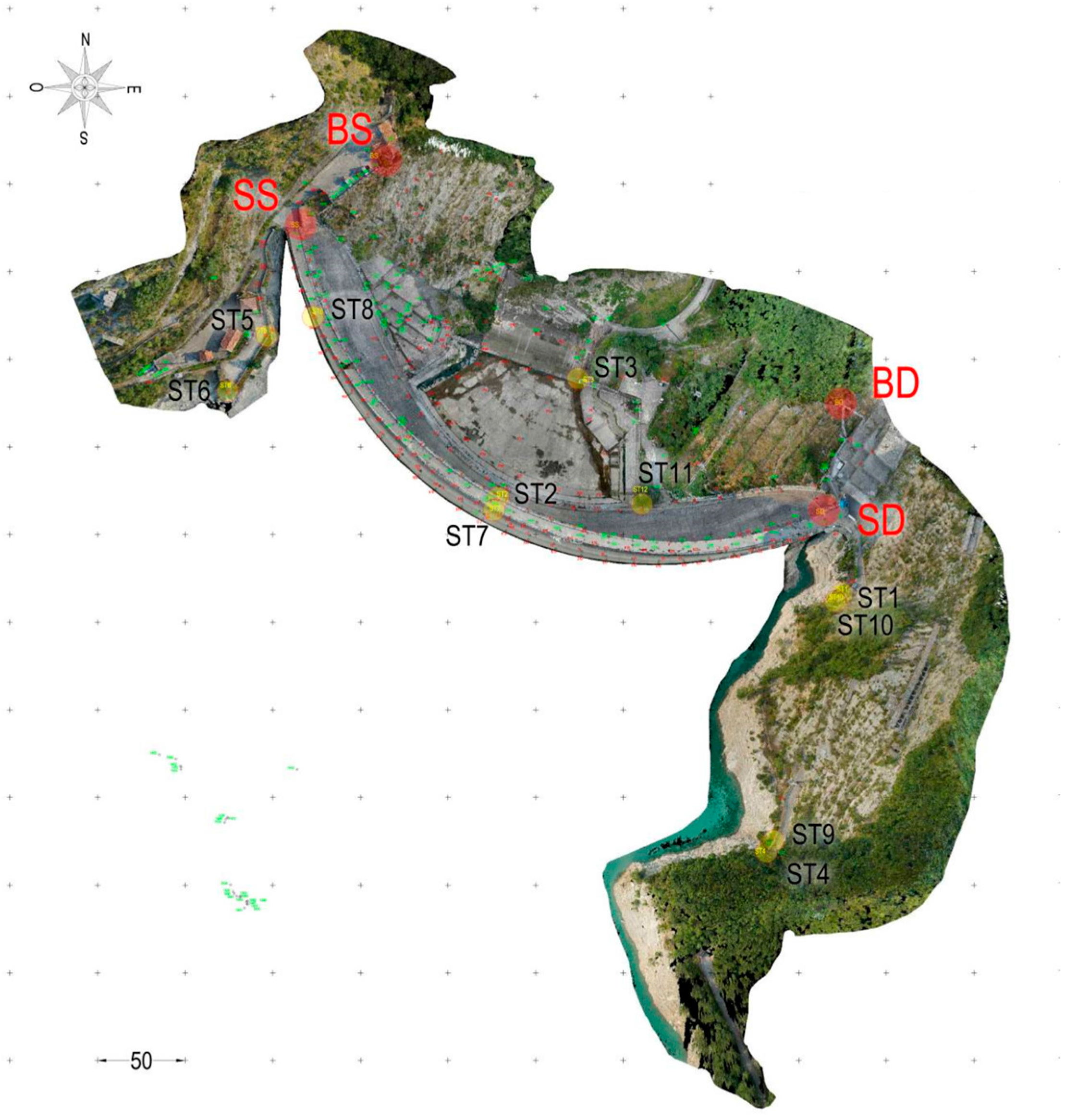
2. Case Study and Experimental Set-Up Description
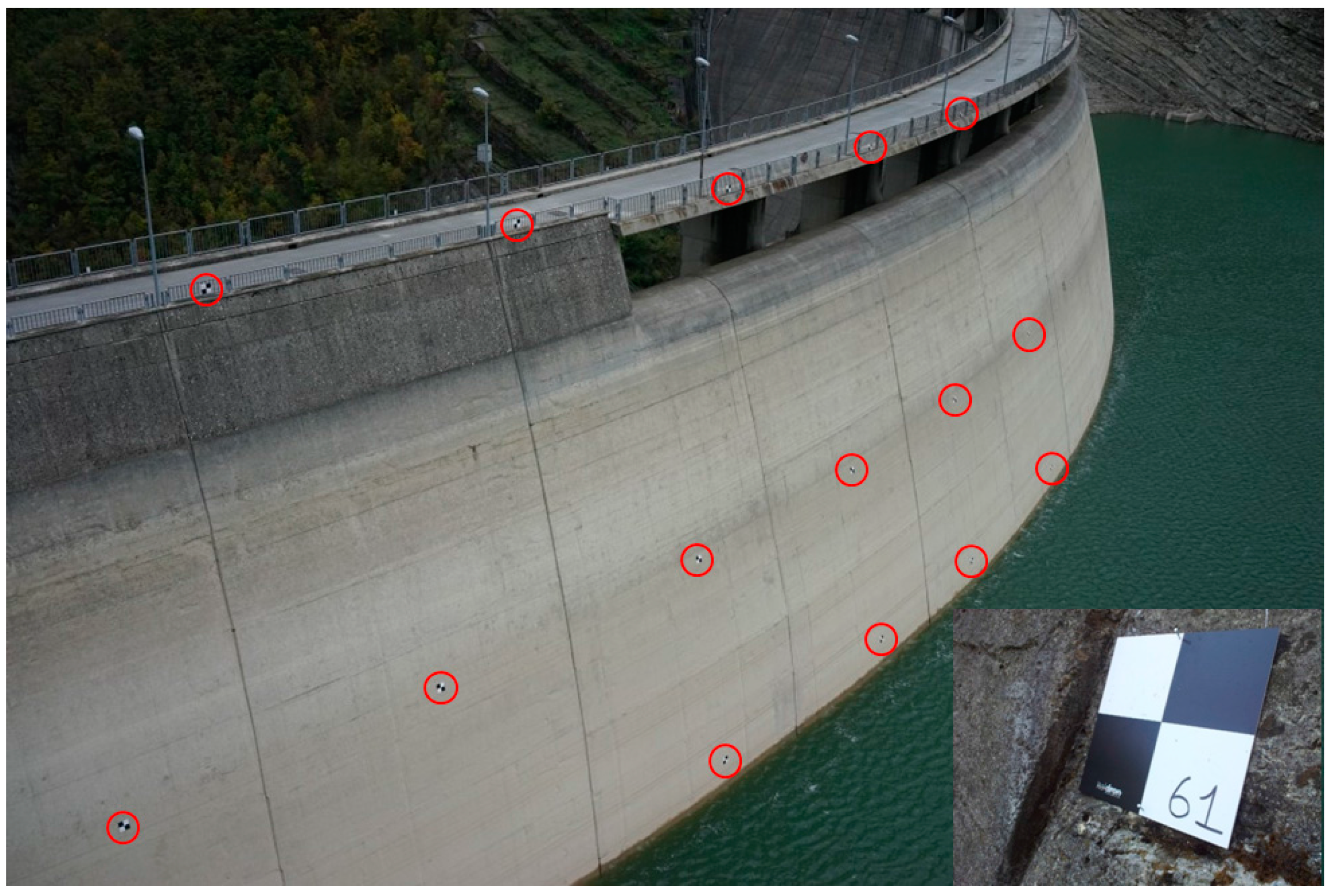
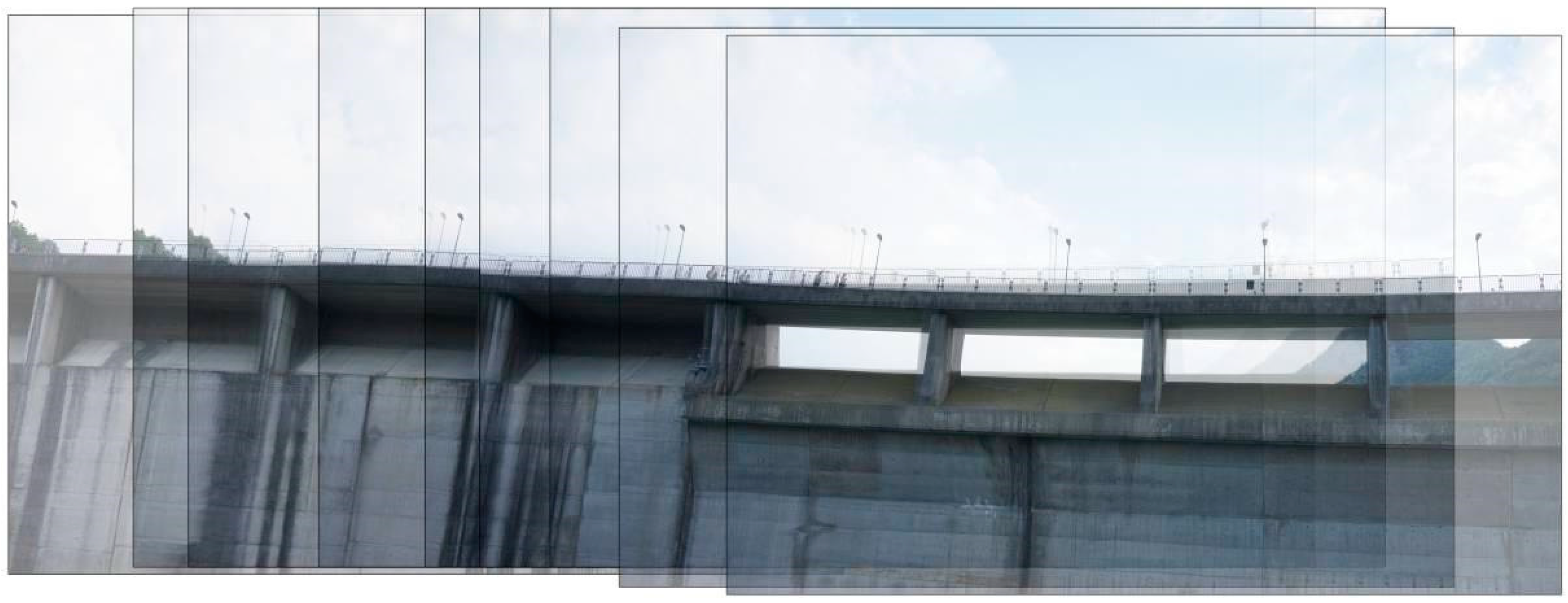
Experimental Set-Up
3. Image Error Analysis
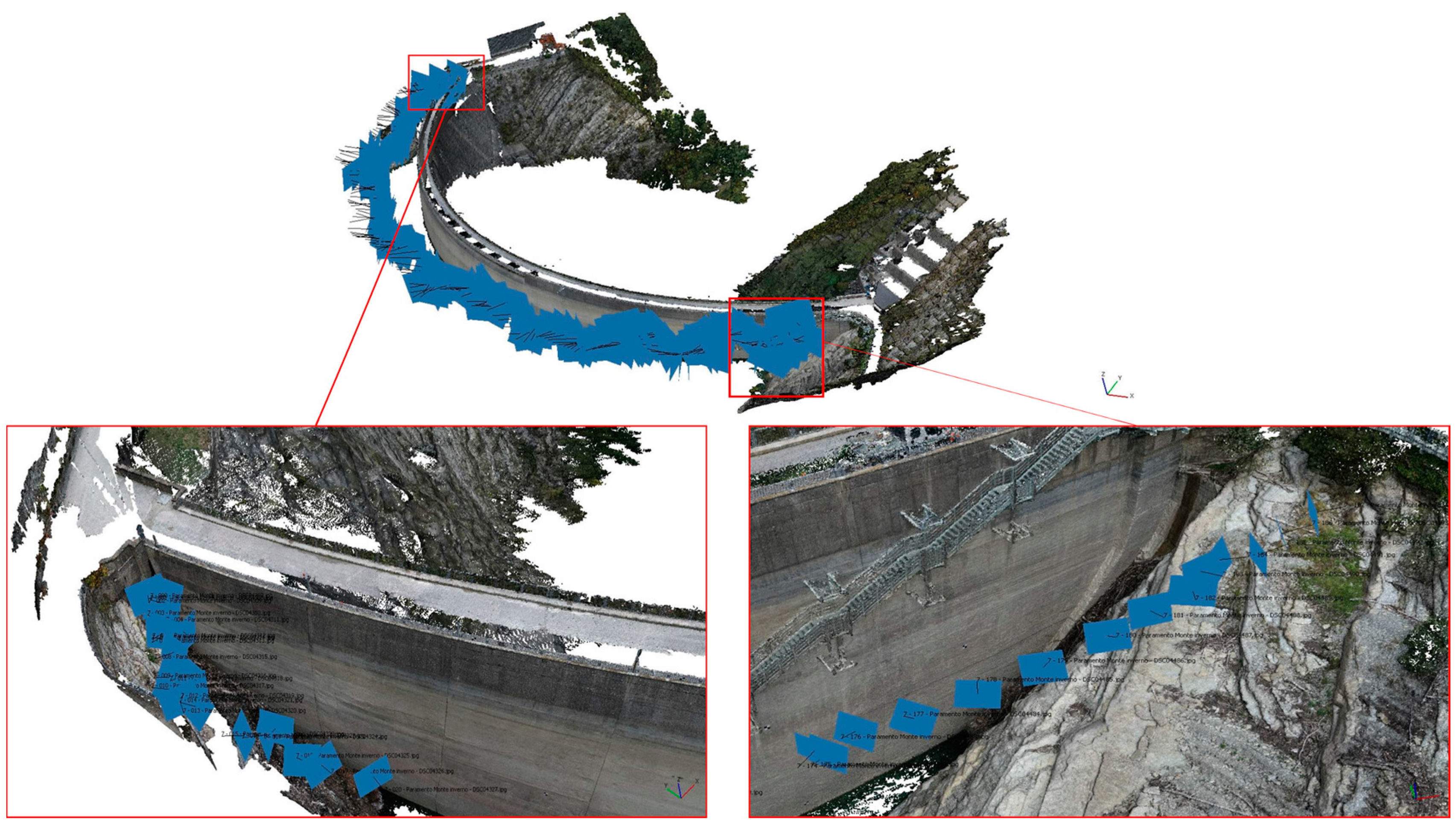
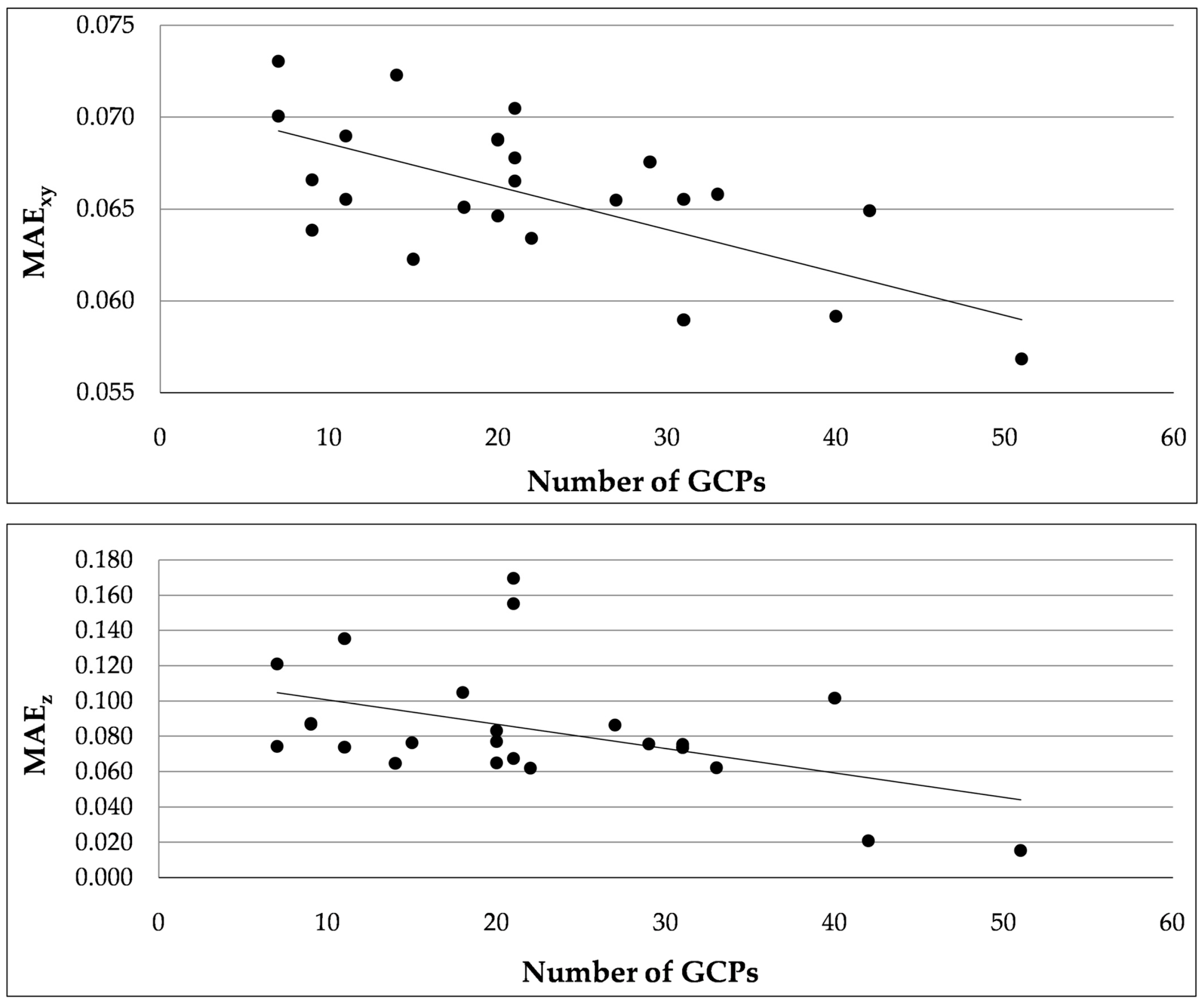
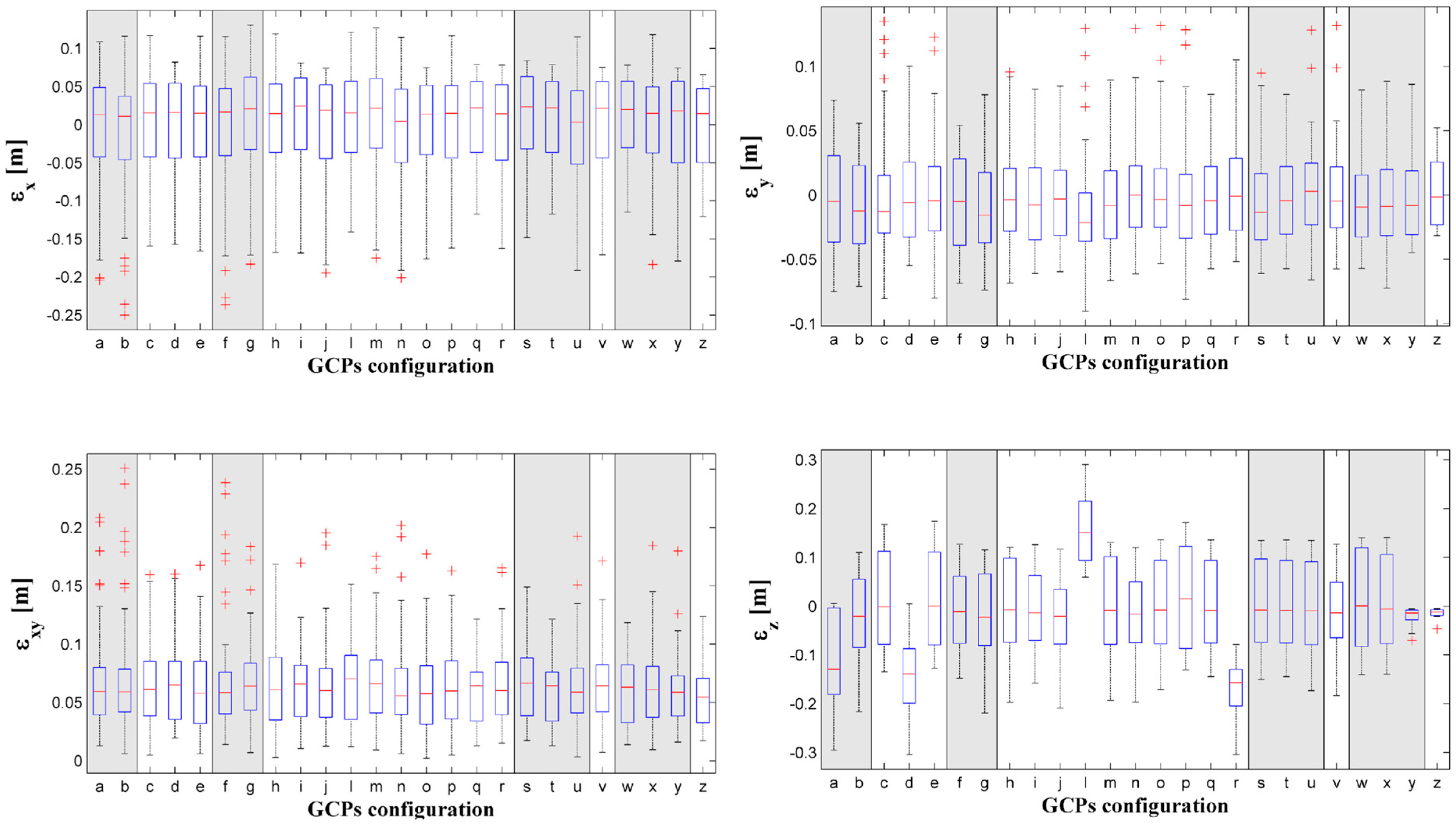
4. Results and Discussion
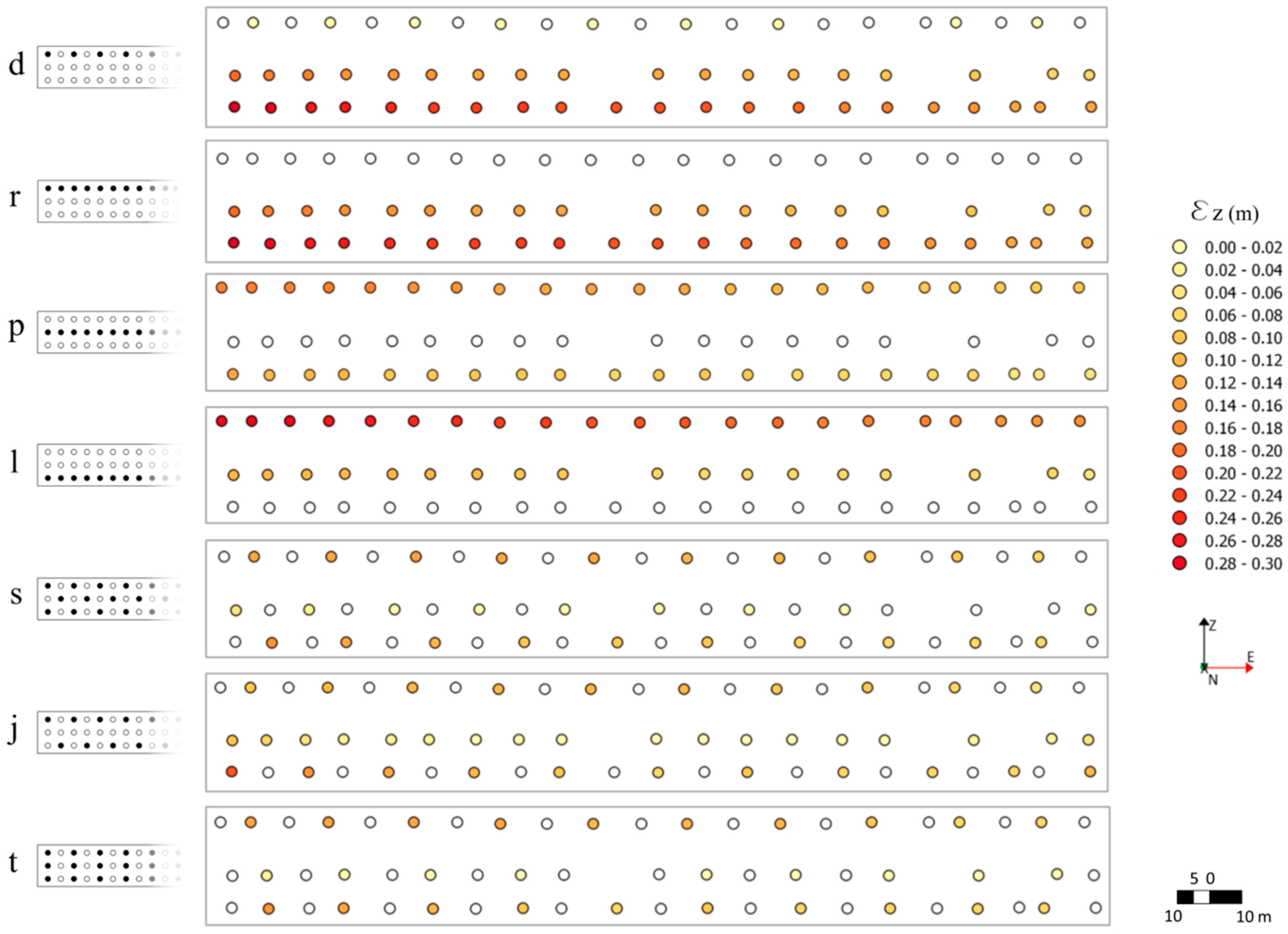
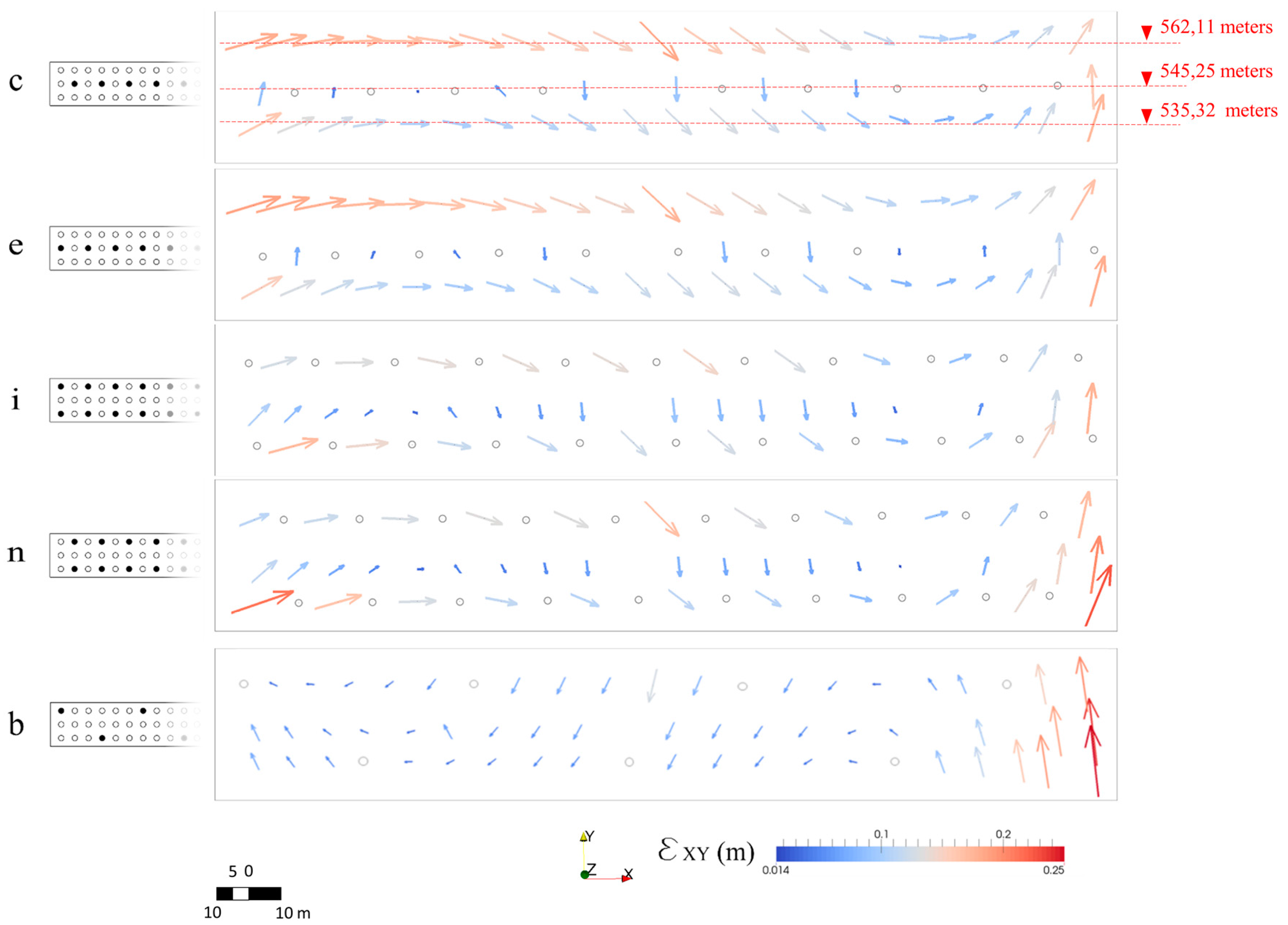
The Dense Point Cloud Accuracy at the Dam Boundaries
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Association of State Dam Safety Officials. Available online: http://www.damsafety.org/news/?p=412f29c8-3fd8-4529-b5c9-8d47364c1f3e (accessed on 27 March 2016).
- Xu, F.; Yang, X.; Zhou, J. Dam-break flood risk assessment and mitigation measures for the Hongshiyan landslide-dammed lake triggered by the 2014 Ludian earthquake. Geomat. Nat. Hazards Risk 2016, 1–19. [Google Scholar] [CrossRef]
- Biscarini, C.; di Francesco, S.; Ridolfi, E.; Manciola, P. On the simulation of floods in a narrow bending valley: The malpasset dam break case study. Water 2016, 8, 545. [Google Scholar] [CrossRef]
- Kuo, J.; Yen, B.; Hsu, Y.; Lin, H. Risk Analysis for Dam Overtopping—Feitsui Reservoir as a Case Study. J. Hydraul. Eng. 2007, 133, 955–963. [Google Scholar] [CrossRef]
- Zhang, L.M.; Xu, Y.; Jia, J.S. Analysis of Earth Dam Failures: A Database Approach. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2009, 3, 184–189. [Google Scholar] [CrossRef]
- Costa, J.E. Floods from Dam Failures; United States Geological Survey: Denver, CO, USA, 1985; pp. 1–59. [Google Scholar]
- International Commission on Large Dams (ICOLD). Lessons from Dam Incidents; ICOLD: Paris, France, 1974. [Google Scholar]
- International Commission on Large Dams (ICOLD). Dam Failures Statistical Analysis, Bulletin 99; ICOLD: Paris, France, 1995. [Google Scholar]
- Hallermann, N.; Morgenthal, G.; Rodehorst, V. Vision-based deformation monitoring of large scale structures using Unmanned Aerial Systems. IABSE Symp. Rep. 2014, 102, 2852–2859. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2016, 1–16. [Google Scholar] [CrossRef]
- Trasviña-Moreno, C.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Rashed, S.; Soyturk, M. Analyzing the Effects of UAV Mobility Patterns on Data Collection in Wireless Sensor Networks. Sensors 2017, 17, 413. [Google Scholar] [CrossRef] [PubMed]
- Venturi, S.; di Francesco, S.; Materazzi, F.; Manciola, P. Unmanned aerial vehicles and Geographical Information System integrated analysis of vegetation in Trasimeno Lake, Italy. Lakes Reserv. Res. Manag. 2016, 21, 5–19. [Google Scholar] [CrossRef]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Cao, C.; Liu, D.; Singh, R.P.; Zheng, S.; Tian, R.; Tian, H. Integrated detection and analysis of earthquake disaster information using airborne data. Geomat. Nat. Hazards Risk 2016, 7, 1099–1128. [Google Scholar] [CrossRef]
- Dominici, D.; Alicandro, M.; Massimi, V. UAV photogrammetry in the post-earthquake scenario: Case studies in L’Aquila. Geomat. Nat. Hazards Risk 2016, 1–17. [Google Scholar] [CrossRef]
- Bolognesi, M.; Farina, G.; Alvisi, S.; Franchini, M.; Pellegrinelli, A.; Russo, P. Measurement of surface velocity in open channels using a lightweight remotely piloted aircraft system. Geomat. Nat. Hazards Risk 2016, 1–14. [Google Scholar] [CrossRef]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface flow measurements from drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef]
- Hallermann, N.; Morgenthal, G.; Rodehorst, V. Unmanned Aerial Systems (UAS)—Case Studies of Vision Based Monitoring of Ageing Structures. In Proceedings of the International Symposium Non-Destructive Testing In Civil Engineering, Berlin, Germany, 15–17 September 2015. [Google Scholar]
- Achille, C.; Adami, A.; Chiarini, S.; Cremonesi, S.; Fassi, F.; Fregonese, L.; Taffurelli, L. UAV-based photogrammetry and integrated technologies for architectural applications—Methodological strategies for the after-quake survey of vertical structures in Mantua (Italy). Sensors 2015, 15, 15520–15539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grenzdörffer, G.J.; Naumann, M.; Niemeyer, F.; Frank, A. Symbiosis of UAS photogrammetry and TLS for surveying and 3D modeling of cultural heritage monuments-a case study about the cathedral of St. Nicholas in the city of Greifswald. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences International Conference on Unmanned Aerial Vehicles in Geomatics, Toronto, ON, Canada, 30 August–2 September 2015; Volume 40, pp. 91–96. [Google Scholar]
- Hallermann, N.; Morgenthal, G. Visual inspection strategies for large bridges using Unmanned Aerial Vehicles (UAV). In Proceedings of the 7th International Conference on Bridge Maintenance, Safety, Management and Life Extension, Shanghai, China, 7–11 July 2014; pp. 661–667. [Google Scholar]
- Hallermann, N.; Morgenthal, G.; Rodehorst, V. Unmanned Aerial Systems (UAS)—Survey and Monitoring Based on High-Quality Airborne; International Association for Bridge and Structural Engineering: Geneva, Switzerland, 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Federal Energy Regulatory Commission Division of Dam Safety and Inspections; Arch Dams: Washington, DC, USA, 1999.
- Zech, Y.; Soares-Frazão, S. Dam-break flow experiments and real-case data. A database from the European IMPACT research. J. Hydraul. Res. 2007, 45, 5–7. [Google Scholar] [CrossRef]
- Soares-Frazão, S. Experiments of dam-break wave over a triangular bottom sill. J. Hydraul. Res. 2007, 45, 19–26. [Google Scholar] [CrossRef]
- Biscarini, C.; di Francesco, S.; Manciola, P. CFD modeling approach for dam break flow studies. Hydrol. Earth Syst. Sci. 2010, 14, 705–718. [Google Scholar] [CrossRef]
- Di Francesco, S.; Biscarini, C.; Manciola, P. Numerical simulation of water free-surface flows through a front-tracking lattice Boltzmann approach. J. Hydroinform. 2015, 17, 1–6. [Google Scholar] [CrossRef]
- Di Francesco, S.; Falcucci, G.; Biscarini, C.; Manciola, P. LBM method for roughness effect in open channel flows. AIP Conf. Proc. 2012, 1947, 1777–1779. [Google Scholar] [CrossRef]
- Di Francesco, S.; Zarghami, A.; Biscarini, C.; Manciola, P. Wall roughness effect in the lattice Boltzmann method. AIP Conf. Proc. 2013, 1558, 1677–1680. [Google Scholar]
- Dargahi, B. Experimental Study and 3D Numerical Simulations for a Free-Overflow Spillway. J. Hydraul. Eng. 2006, 132, 899–907. [Google Scholar] [CrossRef]
- Tabbara, M.; Chatila, J.; Awwad, R. Computational simulation of flow over stepped spillways. Comput. Struct. 2005, 83, 2215–2224. [Google Scholar] [CrossRef]
- Ullman, S. The Interpretation of Structure from Motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1979, 203, 405–426. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Structure from Motion (SFM) Photogrammetry; Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2015. [Google Scholar]
- Micheletti, N.; Chandler, J.H.; Lane, S.N. Investigating the geomorphological potential of freely available and accessible structure-from-motion photogrammetry using a smartphone. Earth Surf. Process. Landf. 2015, 40, 473–486. [Google Scholar] [CrossRef] [Green Version]
- Casella, E.; Rovere, A.; Pedroncini, A.; Mucerino, L.; Casella, M.; Cusati, L.; Vacchi, M.; Ferrari, M.; Firpo, M. Study of wave runup using numerical models and low-altitude aerial photogrammetry: A tool for coastal management. Estuar. Coast. Shelf Sci. 2014, 149, 160–167. [Google Scholar] [CrossRef]
- Castillo, C.; Pérez, R.; James, M.; Quinton, N.; Taguas, E.; Gómez, J. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef] [Green Version]
- Gomez-Gutierrez, A.; Schnabel, S.; Berenguer-Sempere, F.; Contador, F.L.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.; Turner, D. Mapping landslide displace ments using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Ryan, J.; Hubbard, A.; Box, J.; Todd, J.; Christoffersen, P.; Carr, J.; Holt, T.; Snooke, N. UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere 2015, 9, 1–11. [Google Scholar] [CrossRef]
- Hashim, K.A.; Ahmad, A.; Samad, A.M.; Tahar, K.N.; Udin, W.S. Integration of low altitude aerial &terrestrial photogrammetry data in 3D heritage building modeling. In Proceedings of the 2012 IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 16–17 July 2012; pp. 225–230. [Google Scholar]
- Bolognesi, M.; Furini, A.; Russo, V.; Pellegrinelli, A.; Russo, P. Accuracy of cultural heritage 3D models by RPAS and terrestrial photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 113–119. [Google Scholar] [CrossRef]
- Koutsoudis, A.; Vidmar, B.; Ioannakis, G.; Arnaoutoglou, F.; Pavlidis, G.; Chamzas, C. Multi-image 3D reconstruction data evaluation. J. Cult. Herit. 2014, 15, 73–79. [Google Scholar] [CrossRef]
- De Reu, J.; Plets, G.; Verhoeven, G.; de Smedt, P.; Bats, M.; Cherretté, B.; de Maeyer, W.; Deconynck, J.; Herremans, D.; Laloo, P.; et al. Towards a three-dimensional cost-effective registration of the archaeological heritage. J. Archaeol. Sci. 2013, 40, 1108–1121. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Reagan, D.; Sabato, A.; Niezrecki, C. Unmanned Aerial Vehicle Acquisition of Three—Dimensional Digital Image Correlation Measurements for Structural Health Monitoring of Bridges. In SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring; International Society for Optics and Photonics: Portland, OR, USA, 2017; p. 1016909. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry-merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Barry, P.; Coakley, R. Field Accuracy Test of RPAS Photogrammetry. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 27–31. [Google Scholar] [CrossRef]
- Tahar, K.N. An evaluation on different number of ground control points in unmanned aerial vehicle photogrammetric block. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2013, XL-2/W2, 93–98. [Google Scholar]
- Tahar, K.N.; Ahmad, A.; Abdul, W.; Wan, A.; Akib, M.; Mohd, W.; Wan, N. Assessment on Ground Control Points in Unmanned Aerial System Image Processing for Slope Mapping Studies. Int. J. Sci. Eng. Res. 2012, 3, 1–10. [Google Scholar]
- Mesas-Carrascosa, F.-J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.-M.; Borra-Serrano, I.; López-Granados, F. Assessing Optimal Flight Parameters for Generating Accurate Multispectral Orthomosaicks by UAV to Support Site-Specific Crop Management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.-J.; García, M.N.; de Larriva, J.M.; García-Ferrer, A. An Analysis of the Influence of Flight Parameters in the Generation of Unmanned Aerial Vehicle (UAV) Orthomosaicks to Survey Archaeological Areas. Sensors 2016, 16, 1838. [Google Scholar] [CrossRef] [PubMed]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from Structure-from-Motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, F03017. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Hooke, J.; Kirkby, M.J. Reconstructing flash flood magnitudes using “Structure-from-Motion”: A rapid assessment tool. J. Hydrol. 2014, 519, 1914–1927. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Rippin, D.M.; Pomfret, A.; King, N. High resolution mapping of supra-glacial drainage pathways reveals link between micro-channel drainage density, surface roughness and surface reflectance. Earth Surf. Process. Landf. 2015, 40, 1279–1290. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 19. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the Accuracy of Georeferenced Point Clouds Produced via Multi-View Stereopsis from Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Pierleoni, A.; Bellezza, M.; Casadei, S.; Manciola, P. Multipurpose water use in a system of reservoirs. IAHS-AISH Publ. 2007, 315, 107–116. [Google Scholar]
- Buffi, G.; Manciola, P.; de Lorenzis, L.; Cavalagli, N.; Comodini, F.; Gambi, A.; Gusella, V.; Mezzi, M.; Niemeier, W.; Tamagnini, C. Calibration of finite element models of concrete arch-gravity dams using dynamical measures: The case of Ridracoli. In Proceedings of the X International Conference on Structural Dynamics, EURODYN 2017, Rome, Italy, 10–13 September 2017. [Google Scholar]
- Manciola, P.; Di Francesco, S.; Biscarini, C. Flood protection and risk management: The case of Tescio River basin. In Proceedings of the Role of Hydrology inWater Resources Management, Capri, Italy, 13–16 October 2008. [Google Scholar]
- Ravenna, Alpina S.p.A. and Consorzio Acque Forlì, Diga di Ridracoli. 1985. Available online: http://www.alpina-spa.it/resources/pdf/pubblicazioni/985-06-aavv-diga-di-ridracoli-alpina-06-1985.pdf (accessed on 2 August 2017).
- Buffi, G.; Manciola, P.; Grassi, S.; Gambi, A.; Barberini, M. Survey of the Ridracoli Dam: UAV-Based Photogrammetry and Traditional Topographic Techniques in the inspection of Vertical Structures. Geomat. Nat. Hazards Risk 2017. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; le Bivic, C.; Delacourt, R.; Grandjean, N.; le Dantec, P. Assessing the Accuracy of High Resolution Digital Surface Models Computed by PhotoScan® and MicMac® in Sub-Optimal Survey Conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Geospatial Positioning Accuracy Standards, Part 3: National Standard for Spatial Data Accuracy; Federal Geographic Data Committee: Reston, VA, USA, 1998.
- Buffi, G.; Niemeier, W.; Manciola, P.; Grassi, S. Comparison of 3D Model Derived from UAV and TLS—The Experience at Ridracoli Dam, Italy. In Proceedings of the 154th DVW-Seminar, Fulda, Germany, 28–29 November 2016. [Google Scholar]
- James, M.R.; Robson, S.; D’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density | Layout | |||||
|---|---|---|---|---|---|---|
| 1/9 | a |  | b |  | ||
| 1/6 | c |  | d |  | e |  |
| 2/9 | f |  | g |  | ||
| 1/3 | h |  | i |  | j |  |
| l |  | m |  | n |  | |
| o |  | p |  | |||
| q |  | r |  | |||
| 1/2 | s |  | t |  | u |  |
| 5/9 | v |  | ||||
| 2/3 | w |  | x |  | y |  |
| 5/6 | z |  | ||||
| Focal lenght (pix) | fx | 7424.32 |
| fy | 7428.37 | |
| Principal point offset (pix) | cx | 3654.48 |
| cy | 2434.65 | |
| Skew coefficient (pix) | skew | −5.89 |
| Radial distortion coefficient | k1 | 0.05 |
| k2 | −0.25 | |
| k3 | 0.04 | |
| Tangential distortion coefficent | p1 | 0.00 |
| p2 | 0.00 |
| Workflow | |
|---|---|
| Align Photo | |
| Accuracy | Medium |
| Pair pre-selection | Disabled |
| Point Limit | 40,000 |
| Build Preliminary Mesh | |
| Surface type | Arbitrary |
| Source data | Sparse |
| Interpolation | Enabled |
| Polygon count | Custom |
| Point classes | All |
| Import GCPs (GCPs Settings) | |
| Camera accuracy (m) | 10 |
| Marker accuracy (m) | 0.005 |
| Tie point accuracy (pix) | 1 |
| Build Dense Cloud | |
| Quality | Medium |
| Depth filtering | Aggressive |
| Density | Combination ID | Number of GCP | MAE_x | MAE_y | MAE_xy | MAE_z |
|---|---|---|---|---|---|---|
| - | m | m | m | m | ||
| 1/9 | a | 7 | 0.058 | 0.032 | 0.070 | 0.121 |
| b | 7 | 0.059 | 0.032 | 0.073 | 0.074 | |
| 1/6 | c | 9 | 0.053 | 0.033 | 0.067 | 0.087 |
| d | 11 | 0.054 | 0.031 | 0.066 | 0.135 | |
| e | 9 | 0.052 | 0.031 | 0.064 | 0.087 | |
| 2/9 | f | 14 | 0.061 | 0.030 | 0.072 | 0.065 |
| g | 11 | 0.056 | 0.032 | 0.069 | 0.074 | |
| 1/3 | h | 20 | 0.053 | 0.030 | 0.065 | 0.077 |
| i | 22 | 0.053 | 0.029 | 0.063 | 0.062 | |
| j | 21 | 0.054 | 0.029 | 0.066 | 0.066 | |
| l | 21 | 0.053 | 0.037 | 0.068 | 0.155 | |
| m | 20 | 0.055 | 0.032 | 0.069 | 0.083 | |
| n | 20 | 0.056 | 0.030 | 0.069 | 0.065 | |
| o | 15 | 0.051 | 0.029 | 0.062 | 0.076 | |
| p | 18 | 0.052 | 0.033 | 0.065 | 0.105 | |
| q | 31 | 0.049 | 0.027 | 0.059 | 0.073 | |
| r | 21 | 0.056 | 0.030 | 0.067 | 0.170 | |
| 1/2 | s | 31 | 0.054 | 0.031 | 0.066 | 0.075 |
| t | 31 | 0.049 | 0.027 | 0.059 | 0.073 | |
| u | 29 | 0.055 | 0.030 | 0.068 | 0.076 | |
| 5/9 | v | 33 | 0.053 | 0.031 | 0.066 | 0.062 |
| 2/3 | w | 40 | 0.048 | 0.029 | 0.059 | 0.102 |
| x | 27 | 0.054 | 0.029 | 0.065 | 0.086 | |
| y | 42 | 0.055 | 0.027 | 0.065 | 0.021 | |
| 5/6 | z | 51 | 0.050 | 0.023 | 0.057 | 0.015 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ridolfi, E.; Buffi, G.; Venturi, S.; Manciola, P. Accuracy Analysis of a Dam Model from Drone Surveys. Sensors 2017, 17, 1777. https://doi.org/10.3390/s17081777
Ridolfi E, Buffi G, Venturi S, Manciola P. Accuracy Analysis of a Dam Model from Drone Surveys. Sensors. 2017; 17(8):1777. https://doi.org/10.3390/s17081777
Chicago/Turabian StyleRidolfi, Elena, Giulia Buffi, Sara Venturi, and Piergiorgio Manciola. 2017. "Accuracy Analysis of a Dam Model from Drone Surveys" Sensors 17, no. 8: 1777. https://doi.org/10.3390/s17081777
APA StyleRidolfi, E., Buffi, G., Venturi, S., & Manciola, P. (2017). Accuracy Analysis of a Dam Model from Drone Surveys. Sensors, 17(8), 1777. https://doi.org/10.3390/s17081777