Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery


 ,
, 
 and
and
Abstract
:1. Introduction
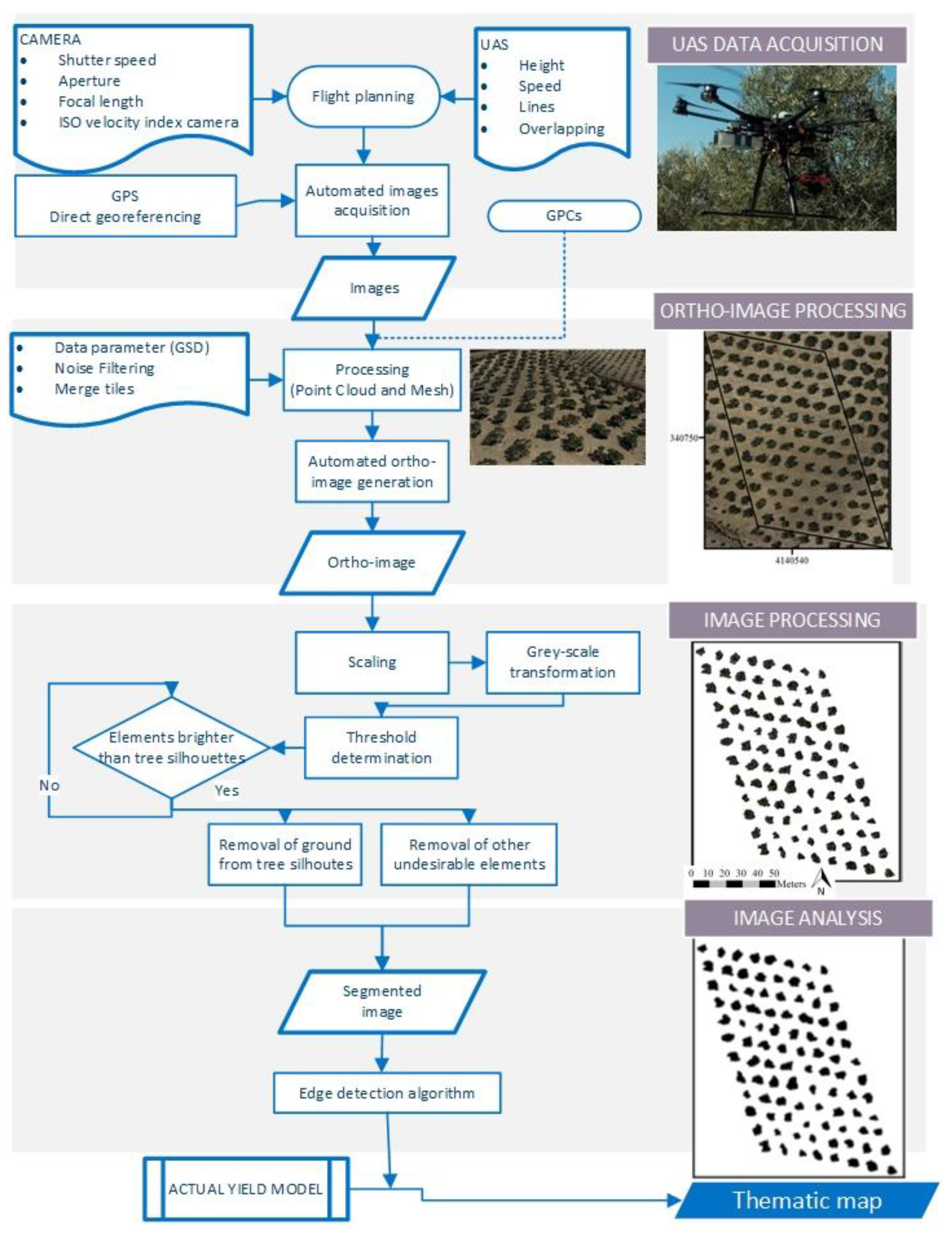
2. Material and Methods
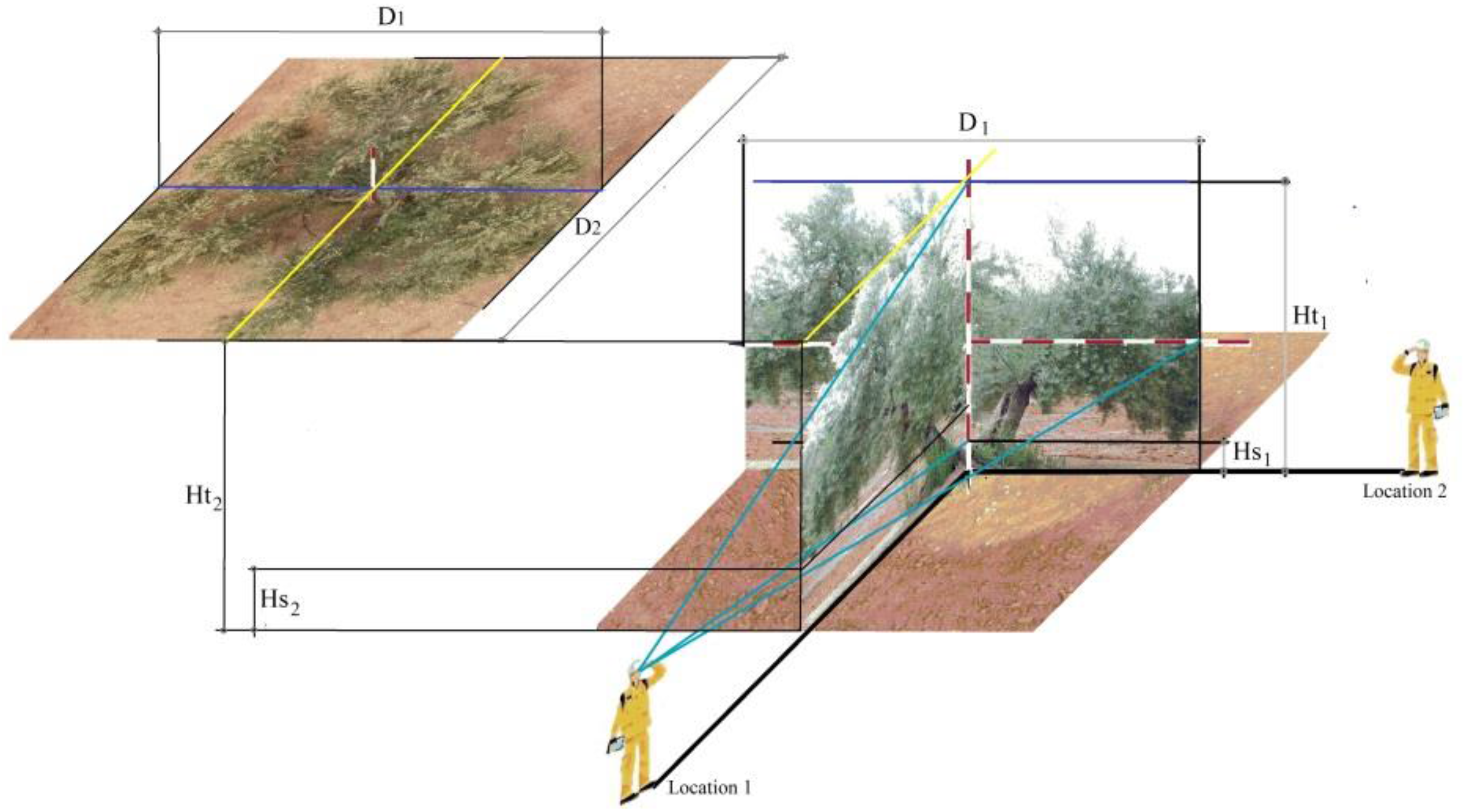
2.1. Measurement and Relationship between AY and Manual Canopy Volume
2.2. Measurement and Relationship between Manual Canopy Volume and Individual Crown Area
3. Results and Discussion
3.1. Orchard Actual “on Year” Yield and Other Features
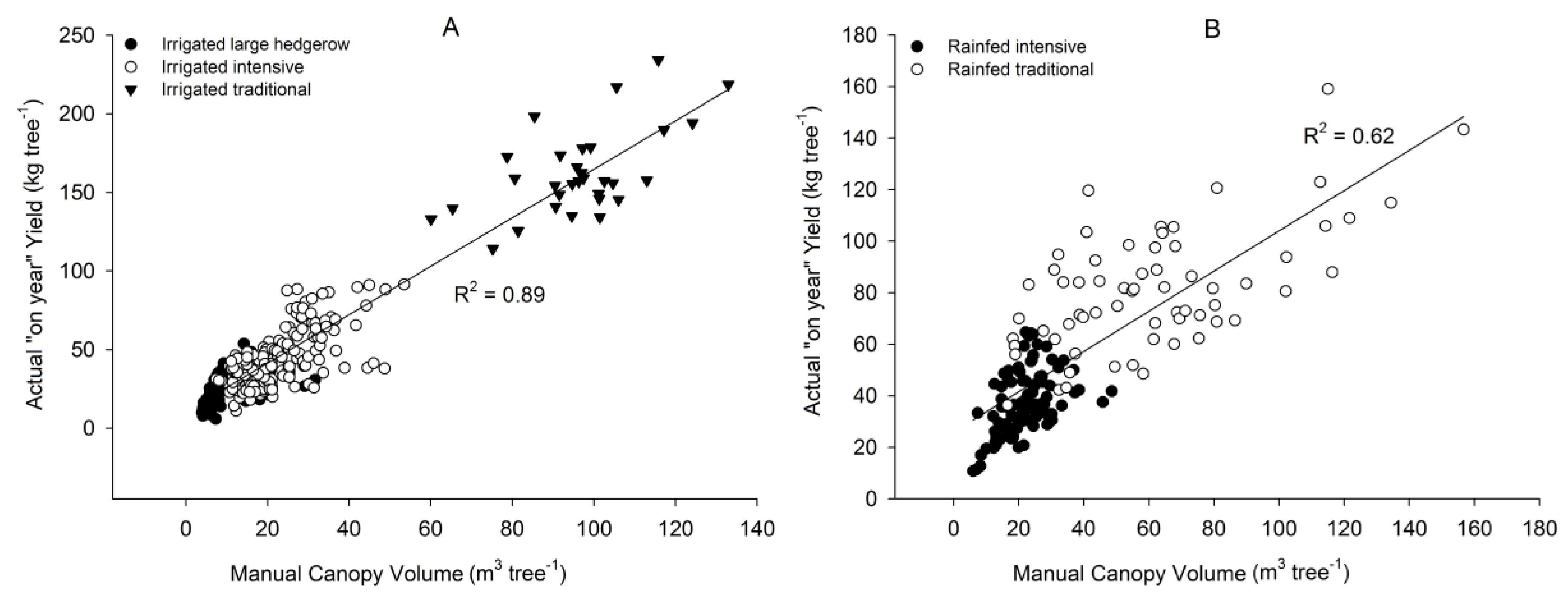
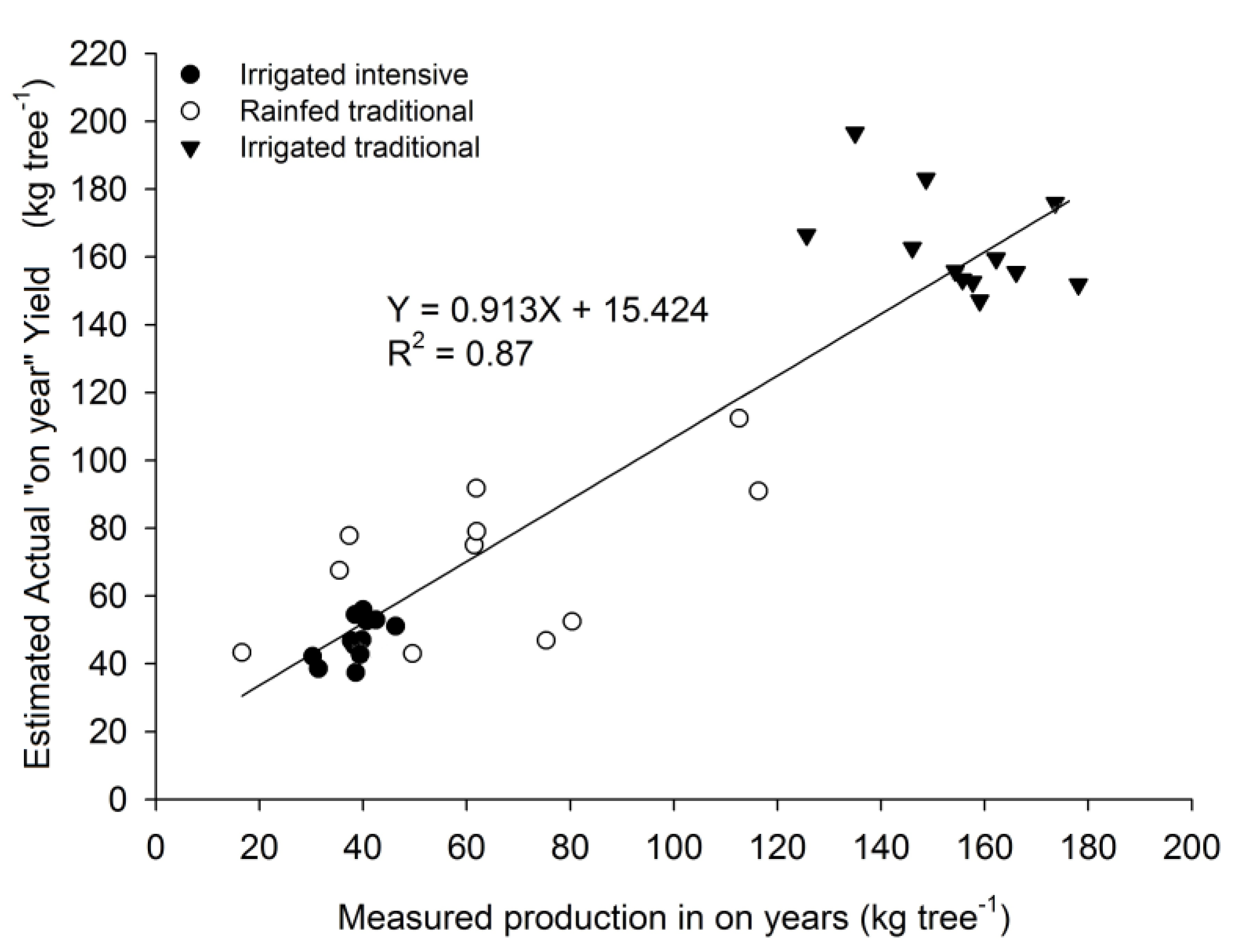
3.2. Actual “on Year” Yield Forecasting Tool Based on Manual Canopy Volume
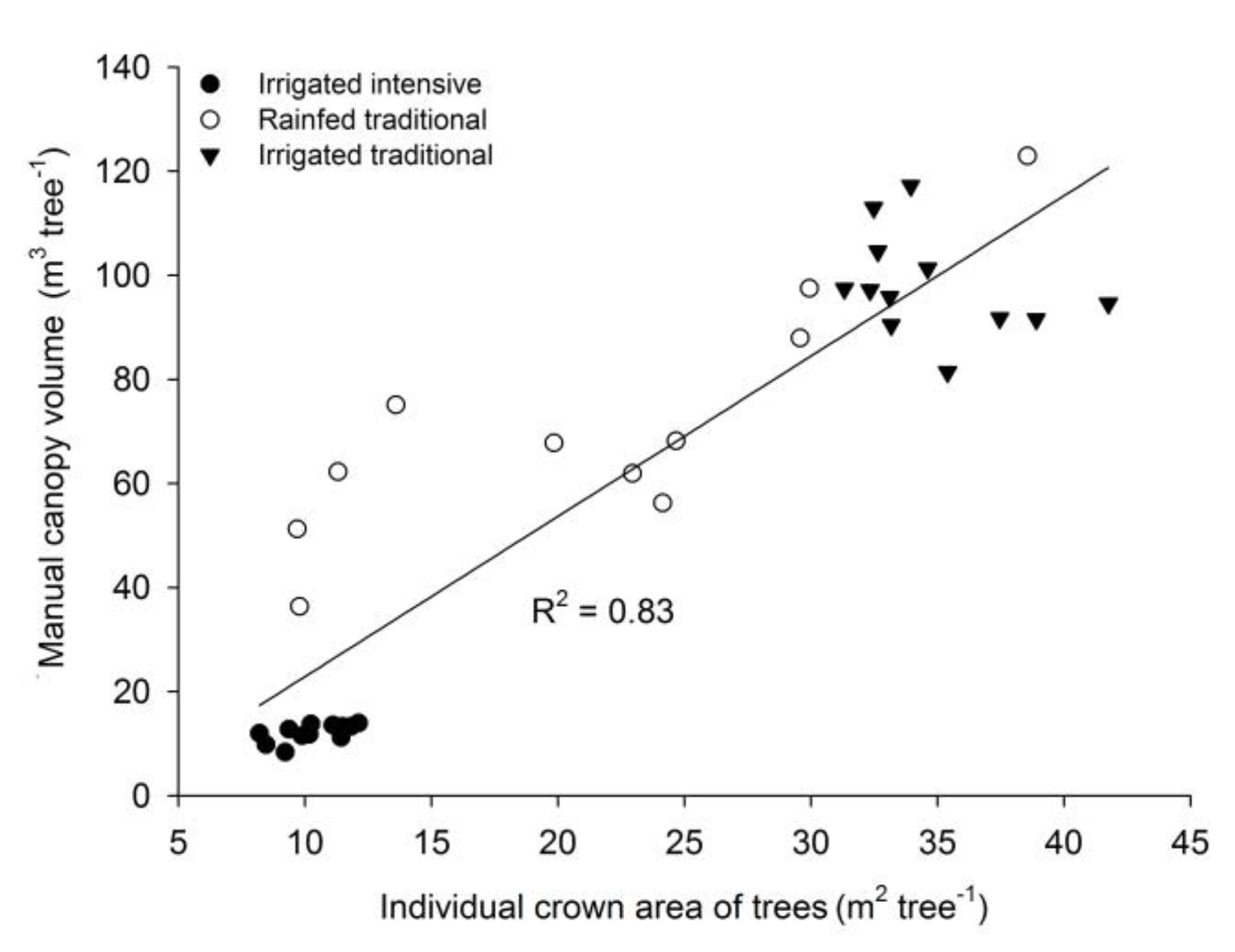
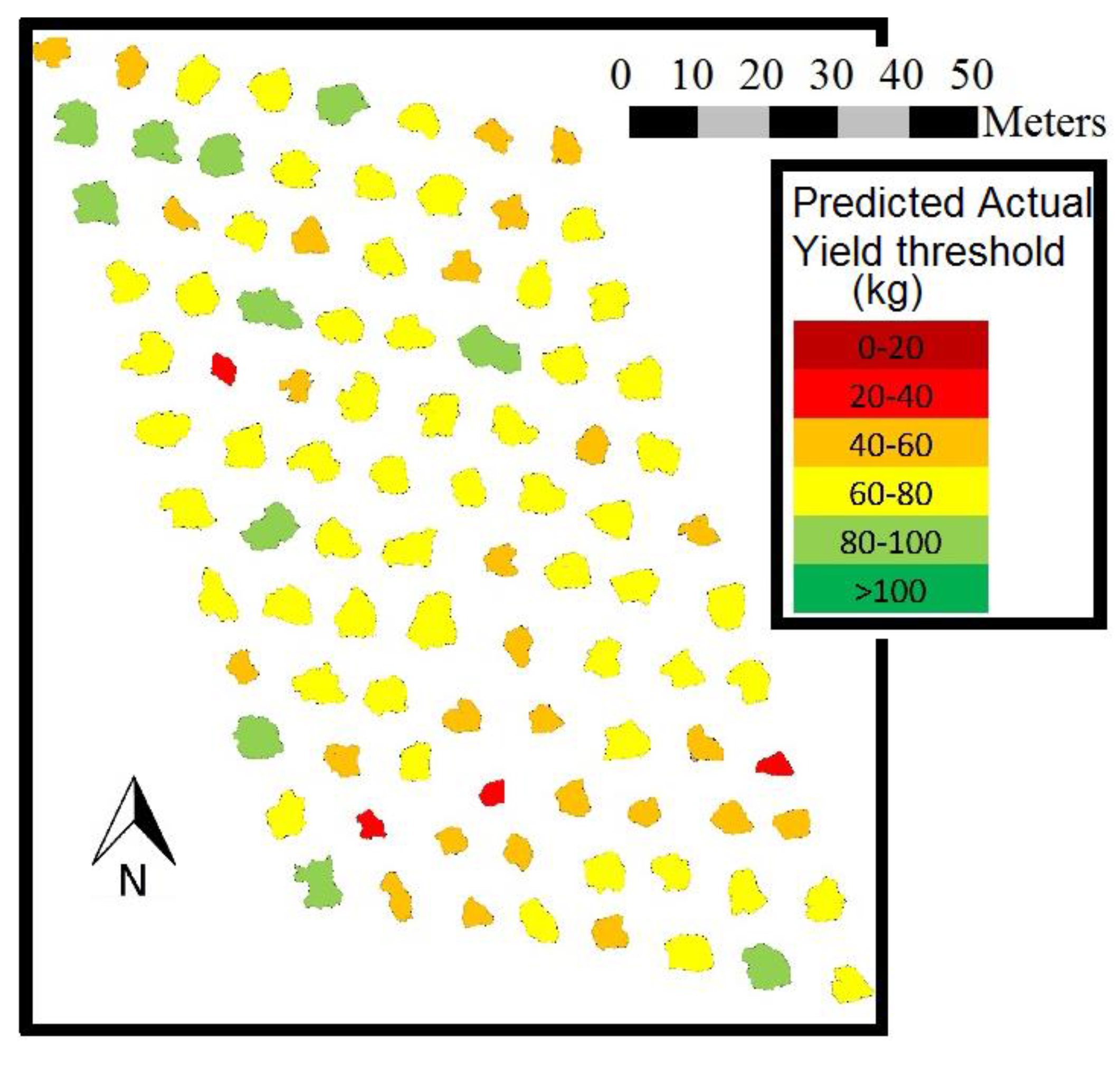
3.3. Actual “on Year” Yield Forecasting Tool Based on Tree Crown Area
4. Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Olive Council [IOC]. World Table Olive Figures 2014. Available online: http://www.internationaloliveoil.org (accessed on 12 December 2014).
- Rallo, L.; Barranco, D.; Castro-García, S.; Connor, D.J.; Gómez del Campo, M.; Rallo, P. High-density olive plantations. Hortic. Rev. 2013, 41, 303–384. [Google Scholar]
- Lavee, S.; Haskal, A.; Avidan, B. The effect of planting distances and tree shape on yield and harvest efficiency of cv. Manzanillo table olives. Sci. Hortic. 2012, 142, 166–173. [Google Scholar] [CrossRef]
- Van Ittersum, M.K.; Cassman, K.G.; Grassini, P.; Wolf, J.; Tittonell, P.; Hochman, Z. Yield gap analysis with local to global relevance—A review. Field Crops Res. 2013, 143, 4–17. [Google Scholar] [CrossRef]
- Castro-García, S.; Blanco-Roldán, G.L.; Gil-Ribes, J. Suitability of Spanish ‘Manzanilla’ table olive orchards for trunk shaker harvesting. Biosyst. Eng. 2015, 129, 388–395. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LiDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 36, 259–276. [Google Scholar] [CrossRef]
- Redei, K.; Veperdi, I. Study of the relationships between crown and volume production of black locust trees (Robinia Pseudoacacia L.). For. J. 2001, 47, 135–142. [Google Scholar]
- Connor, D.J. Towards optimal designs for hedgerow orchards. Aust. J. Agric. Res. 2006, 57, 1067–1072. [Google Scholar] [CrossRef]
- Muñoz-Cobo, M.P.; Humanes-Guillén, J. (Eds.) Poda de producción. In La Poda Del Olivo: Moderna Olivicultura; Editorial Agrícola Española: Madrid, Spain, 2006; pp. 77–139. [Google Scholar]
- Kanan, C.; Cottrell, G.W. Color-to-grayscale: Does the method matter in image recognition? PLoS ONE 2012, 7, e29740. [Google Scholar] [CrossRef] [PubMed]
- Meyer, G.E.; Neto, J.C. Verification of colour vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Igathinathane, C.; Pordesimo, L.O.; Columbus, E.P.; Batchelor, W.D.; Methuku, S.R. Shape identification and particles size distribution from basic shape parameters using ImageJ. Comput. Electron. Agric. 2008, 63, 168–182. [Google Scholar] [CrossRef]
- Barone, E.; La Mantia, M.; Marchese, A.; Marra, F.P. Improvement in yield and fruit size and quality of the main Italian table olive cultivar ‘Nocellara del Belice’. Sci. Agric. 2014, 71, 52–57. [Google Scholar] [CrossRef]
- Farinelli, D.; Ruffolo, M.; Boco, M.; Tombesi, A. Yield efficiency and mechanical harvesting with trunk shaker of some international olive cultivars. Acta Hortic. 2012, 949, 379–384. [Google Scholar] [CrossRef]
- Simkeshzadeh, N.; Etemadi, N.; Mobli, M.; Baninasab, B. Use of olive cultivars in landscape planning regarding form and texture. J. Agric. Sci. Technol. 2015, 17, 717–724. [Google Scholar]
- Fernández-Escobar, R. A model to estimate tree size when trunk girth cannot be used. J. Am. Pomol. Soc. 2014, 68, 80–88. [Google Scholar]
- Aggelopoulou, A.D.; Bochtis, D.; Fountas, S.; Swain, K.C.; Gemtos, T.A.; Nanos, G.D. Yield prediction in apple orchards based on image processing. Precis. Agric. 2011, 12, 448–456. [Google Scholar] [CrossRef]
- Moriana, A.; Orgaz, F.; Pastor, M.; Fereres, E. Yield responses of a mature olive orchard to water deficits. J. Am. Soc. Hortic. Sci. 2003, 128, 425–431. [Google Scholar]
- Connor, D.J. Adaptation of olive (Olea europaea L.) to water-limited environments. Aust. J. Agric. Res. 2005, 56, 1181–1189. [Google Scholar] [CrossRef]
- Villalobos, F.J.; Testi, L.; Hidalgo, J.; Pastor, M.; Orgaz, F. Modelling potential growth and yield of olive (Olea europaea L.) canopies. Eur. J. Agron. 2006, 24, 296–303. [Google Scholar] [CrossRef]
- Tombesi, S.; Poni, S.; Palliotti, A.; Farinelli, D. Mechanical vibration transmission and harvesting effectiveness is affected by the presence of branch suckers in olive trees. Biosyst. Eng. 2017, 158, 1–9. [Google Scholar] [CrossRef]
- Castillo-Ruiz, F.J.; Castro-Garcia, S.; Blanco-Roldan, G.L.; Sola-Guirado, R.R.; Gil-Ribes, J.A. Olive crown porosity measurement based on radiation transmittance: An assessment of pruning effect. Sensors 2016, 16, 723. [Google Scholar] [CrossRef] [PubMed]
- Gougeon, F.A.; Leckie, D.G. The individual tree crown approach applied to Ikonos images of a coniferous plantation area. Photogramm. Eng. Remote Sens. 2006, 2, 1287–1297. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef]
- Ke, Y.H.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Jimenez-Jimenez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Castillo-Ruiz, F.J.; Gil-Ribes, J.A. Vibration parameters assessment to develop a continuous lateral canopy shaker for mechanical harvesting of traditional olive trees. Span. J. Agric. Res. 2016, 14, 0204. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orchard Category | Planting Density (tree ha−1) – (Planting Distance) | Tree Production or Actual Yield (kg tree−1) | Orchard Actual Yield (kg ha−1) | Manual Canopy Volume (m3 tree−1) | Production Per Canopy Volume (kg m−3) | Orchard Canopy Volume (m3 ha−1) |
|---|---|---|---|---|---|---|
| Irrigated large hedgerow | 555 (6 × 3 m) | 31.4 ± 9.3 | 17,463 | 11.7 ± 3.4 | 2.8 ± 0.8 | 6723 |
| 408 (7 × 3.5 m) | 24.2 ± 11.4 | 9883 | 7.6 ± 2.5 | 3.1 ± 0.9 | 3099 | |
| 312 (8 × 4 m) | 29.3 ± 6.1 | 9171 | 21.6 ± 5.3 | 1.4 ± 0.3 | 6760 | |
| Irrigated intensive | 285 (7 × 5 m) | 53.3 ± 17.3 | 15,251 | 19.9 ± 9.5 | 2.9 ± 0.6 | 5690 |
| 208 (6 × 8 m) | 39.0 ± 16.8 | 7479 | 21.4 ± 9.3 | 1.9 ± 0.6 | 4655 | |
| 204 (7 × 7 m) | 45.1 ± 15.4 | 9190 | 23.9 ± 8.1 | 1.9 ± 0.5 | 4879 | |
| Rainfed intensive | 158 (7 × 9 m) | 45.2 ± 11.5 | 7181 | 21.4 ± 5.1 | 2.2 ± 0.7 | 3395 |
| 138 (8 × 9 m) | 31.4 ± 9.6 | 4278 | 22.3 ± 9.6 | 1.5 ± 0.4 | 3023 | |
| Irrigated traditional | 70 (12 × 12 m) | 162.9 ± 27.9 | 11,241 | 96.4 ± 15.6 | 1.7 ± 0.3 | 6652 |
| Rainfed traditional | 70 (12 quincunx) | 81.2 ± 23.6 | 6496 | 61.2 ± 30.6 | 1.6 ± 0.8 | 4893 |
| Orchard Category | Production in or Actual Yield (kg tree−1) | Manual Canopy Volume (m3 tree−1) | Individual Crown Area (m2 tree−1) |
|---|---|---|---|
| Irrigated intensive | 38.6 ± 4.3 a | 12.1 ± 1.7 a | 10.3 ± 1.3 a |
| Rainfed traditional | 65.8 ± 29.8 b | 73.6 ± 27.6 b | 24.2 ± 13.4 b |
| Irrigated traditional | 155.2 ± 15.0 c | 98.0 ± 9.9 c | 34.8 ± 3.1 c |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sola-Guirado, R.R.; Castillo-Ruiz, F.J.; Jiménez-Jiménez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Gil-Ribes, J.A. Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery. Sensors 2017, 17, 1743. https://doi.org/10.3390/s17081743
Sola-Guirado RR, Castillo-Ruiz FJ, Jiménez-Jiménez F, Blanco-Roldan GL, Castro-Garcia S, Gil-Ribes JA. Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery. Sensors. 2017; 17(8):1743. https://doi.org/10.3390/s17081743
Chicago/Turabian StyleSola-Guirado, Rafael R., Francisco J. Castillo-Ruiz, Francisco Jiménez-Jiménez, Gregorio L. Blanco-Roldan, Sergio Castro-Garcia, and Jesus A. Gil-Ribes. 2017. "Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery" Sensors 17, no. 8: 1743. https://doi.org/10.3390/s17081743
APA StyleSola-Guirado, R. R., Castillo-Ruiz, F. J., Jiménez-Jiménez, F., Blanco-Roldan, G. L., Castro-Garcia, S., & Gil-Ribes, J. A. (2017). Olive Actual “on Year” Yield Forecast Tool Based on the Tree Canopy Geometry Using UAS Imagery. Sensors, 17(8), 1743. https://doi.org/10.3390/s17081743