Walking Distance Estimation Using Walking Canes with Inertial Sensors


Abstract
:1. Introduction
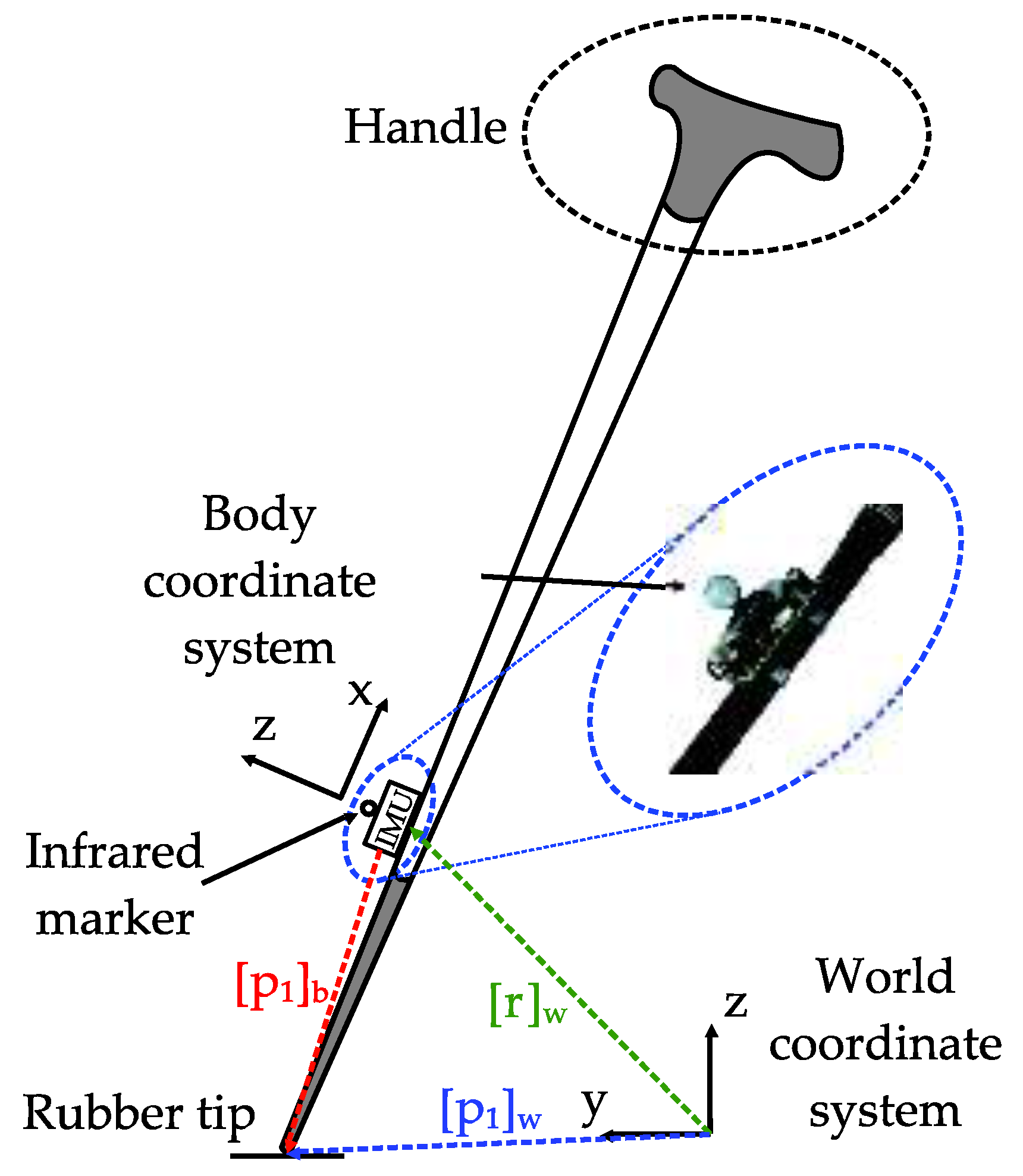
2. System Description
3. Methodology
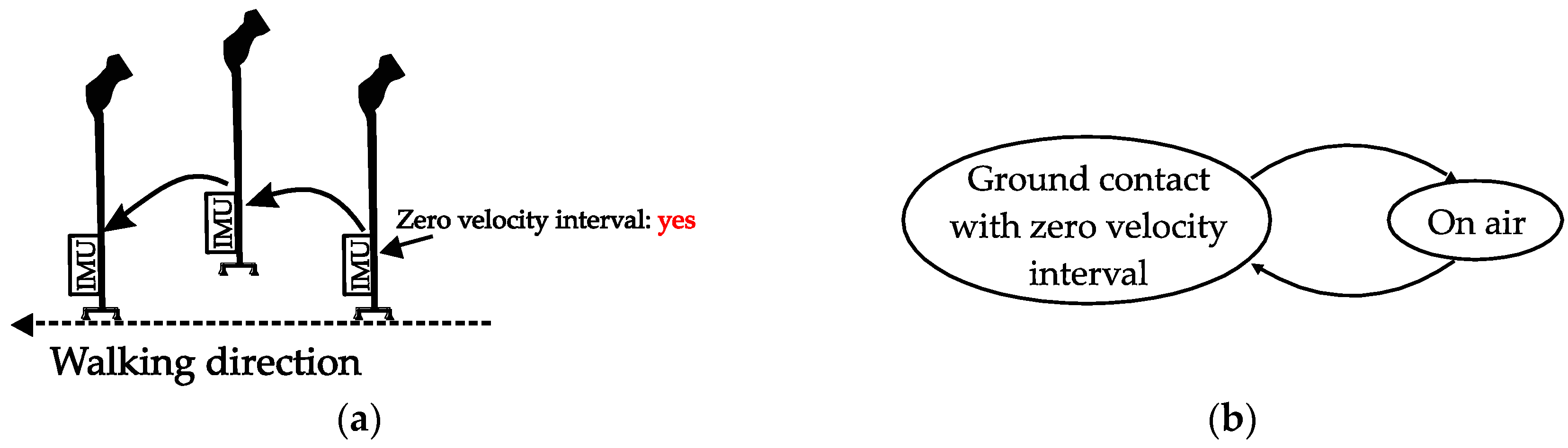
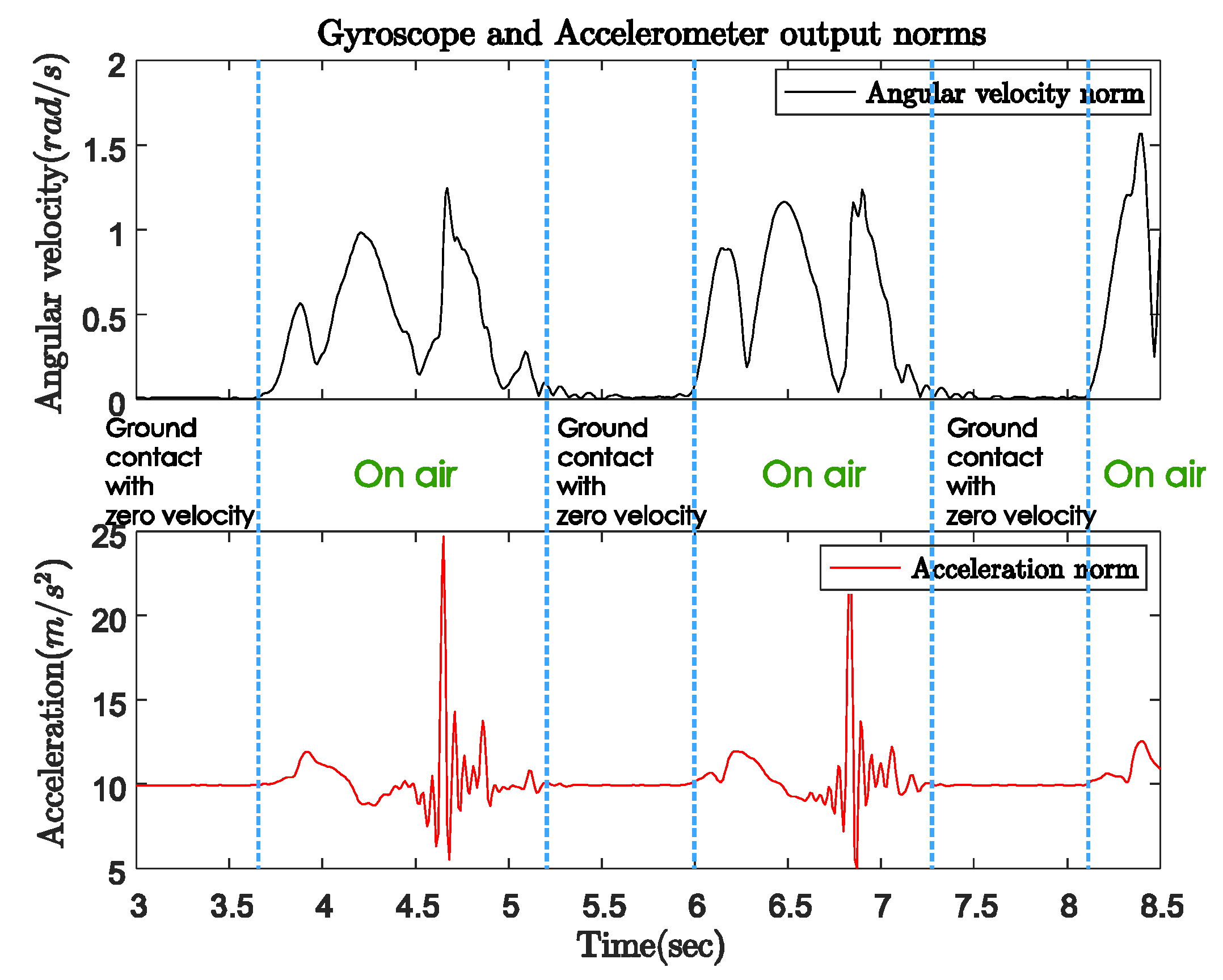
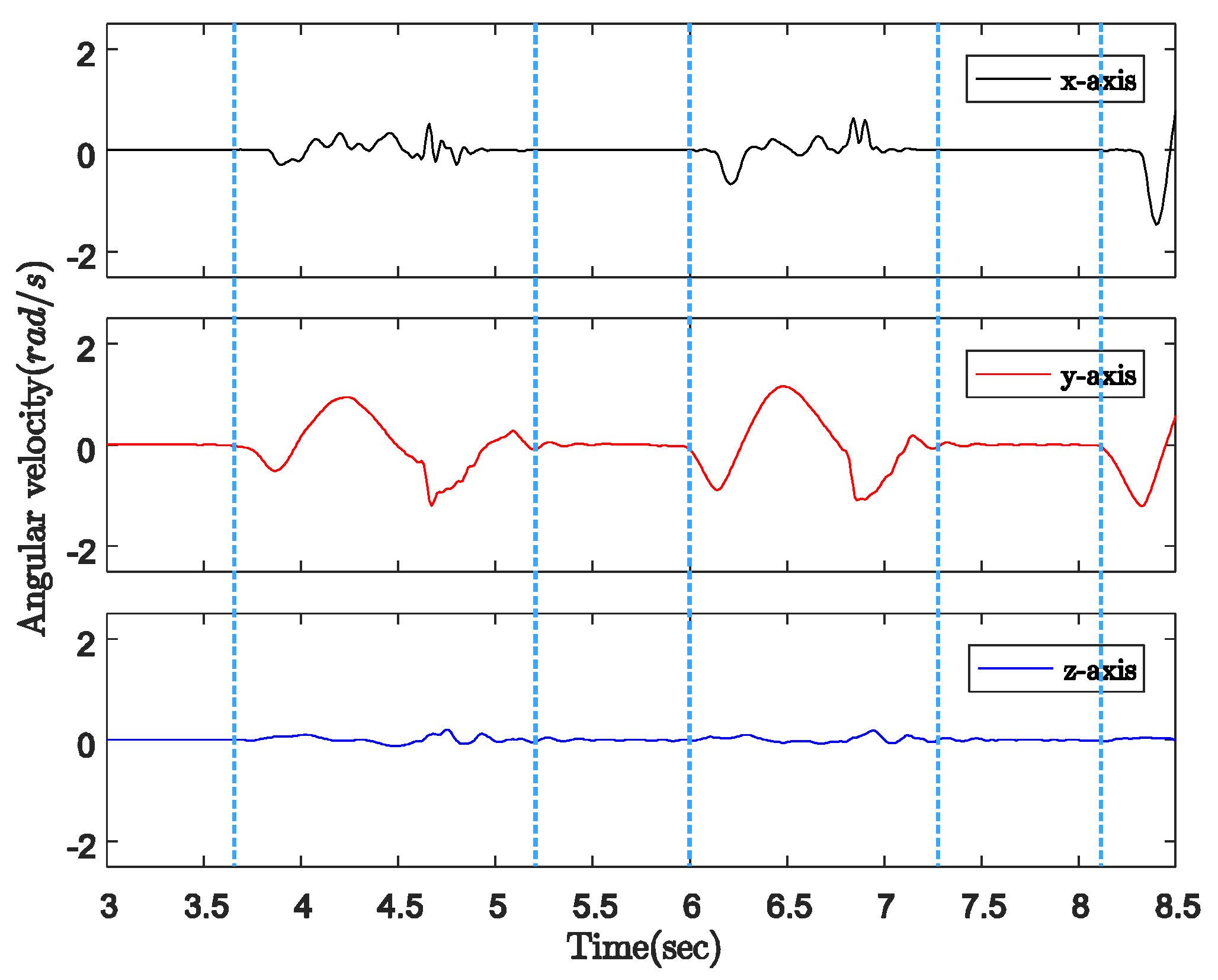
3.1. Cane Movement and Walking Phase Detection
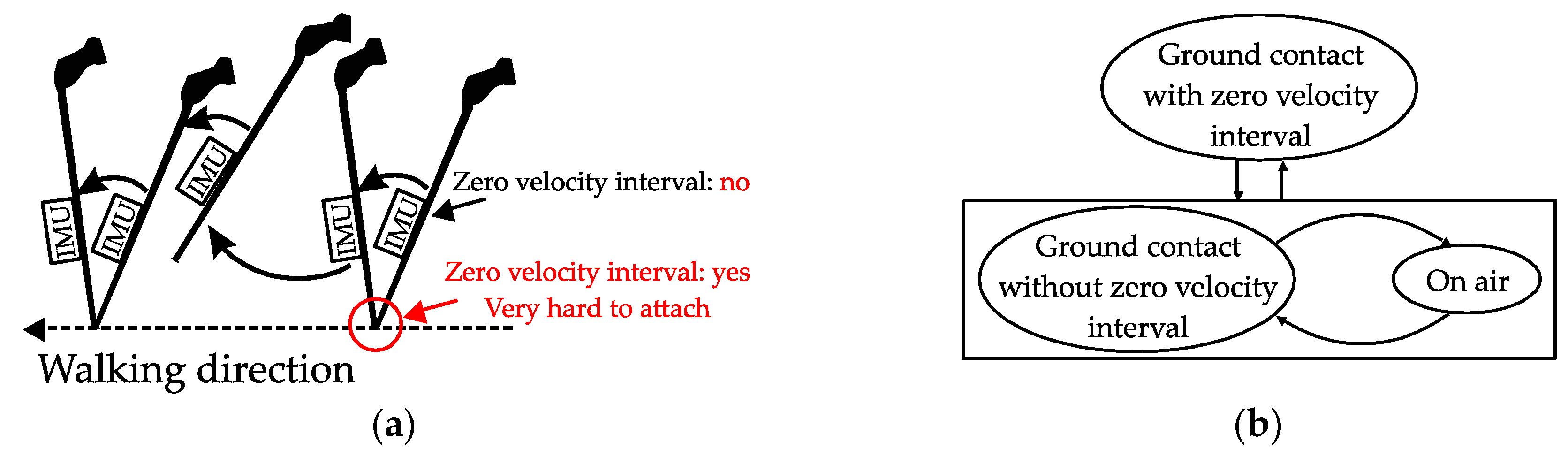
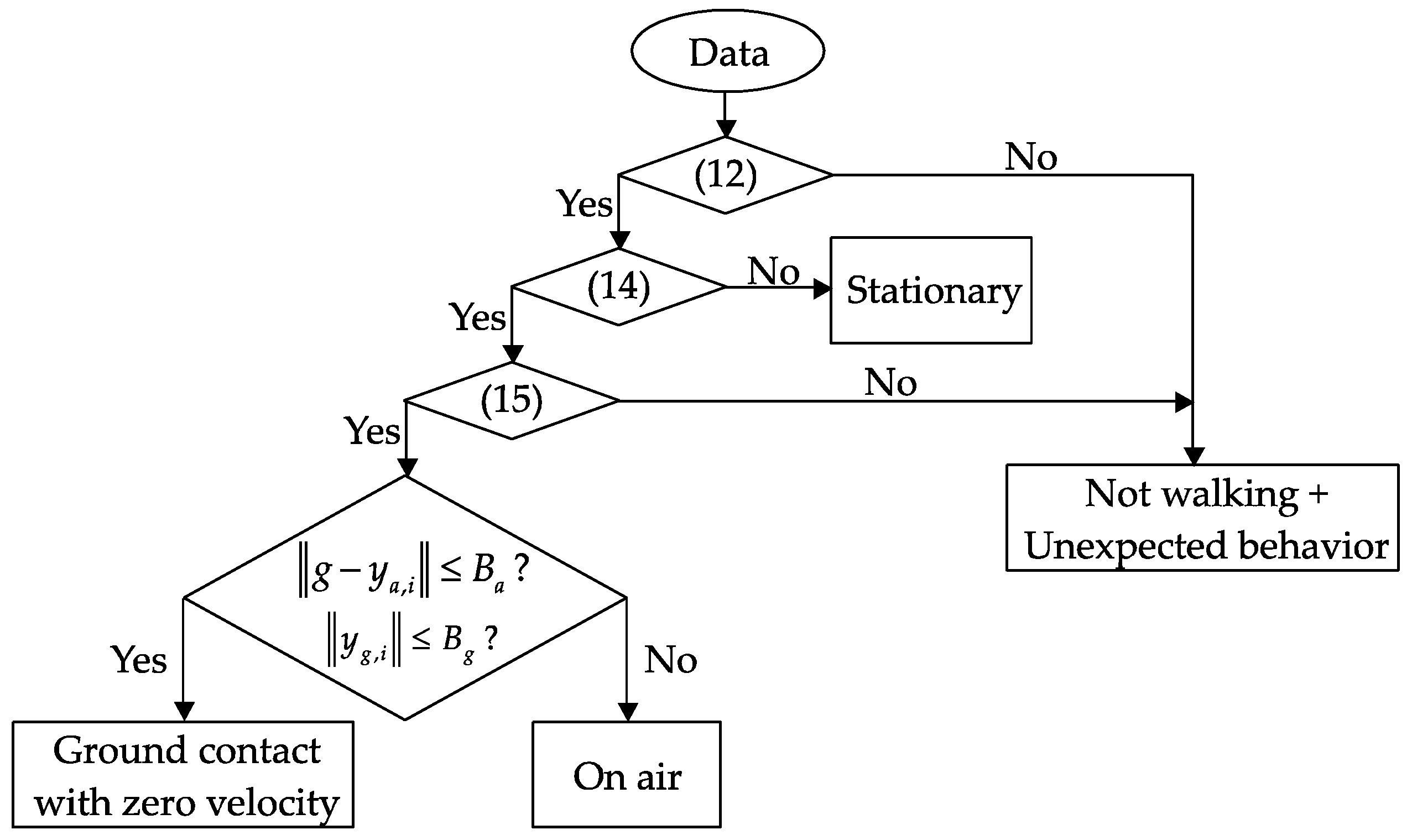
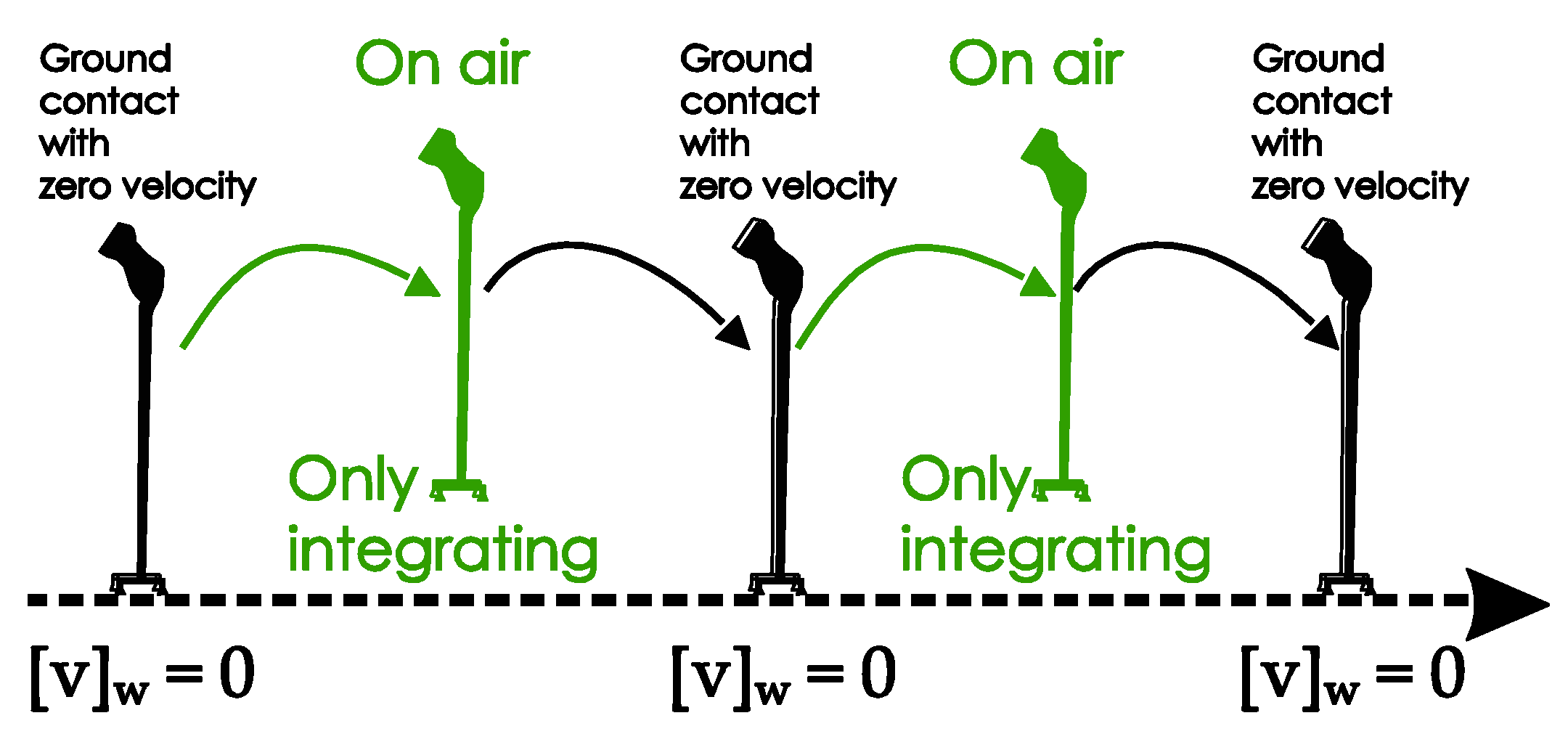
3.1.1. Quadripod Cane
- Ground contact (with zero-velocity interval): All four legs are on the ground and the cane is not moving. There is no rotation of the sensor unit during the ground contact.
- On air: The legs are not on the ground and the cane is freely moving.
- Ground contact (with zero-velocity interval): No external acceleration and no angular velocity, only affected by gravitational acceleration.
- On air: Contains the contact shock moment, and acceleration and angular velocity are significant.
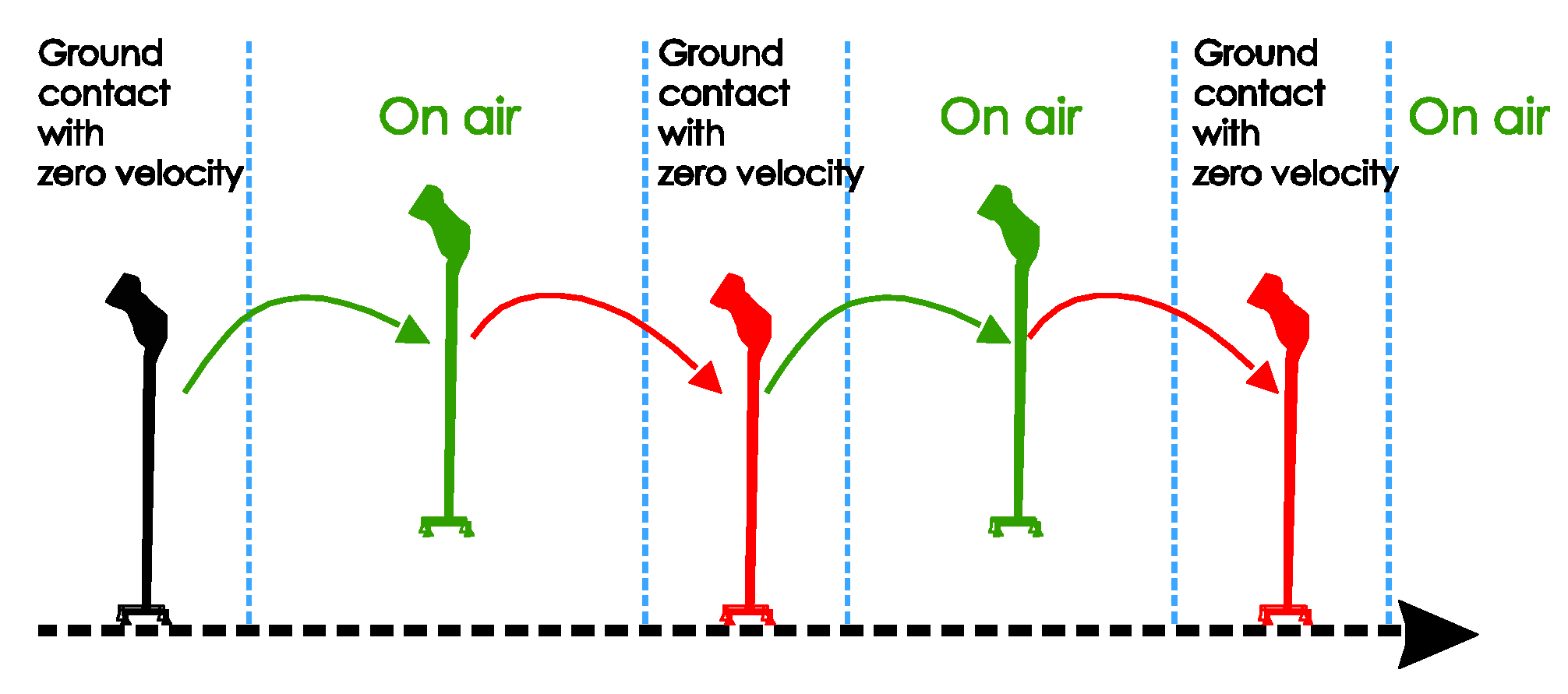
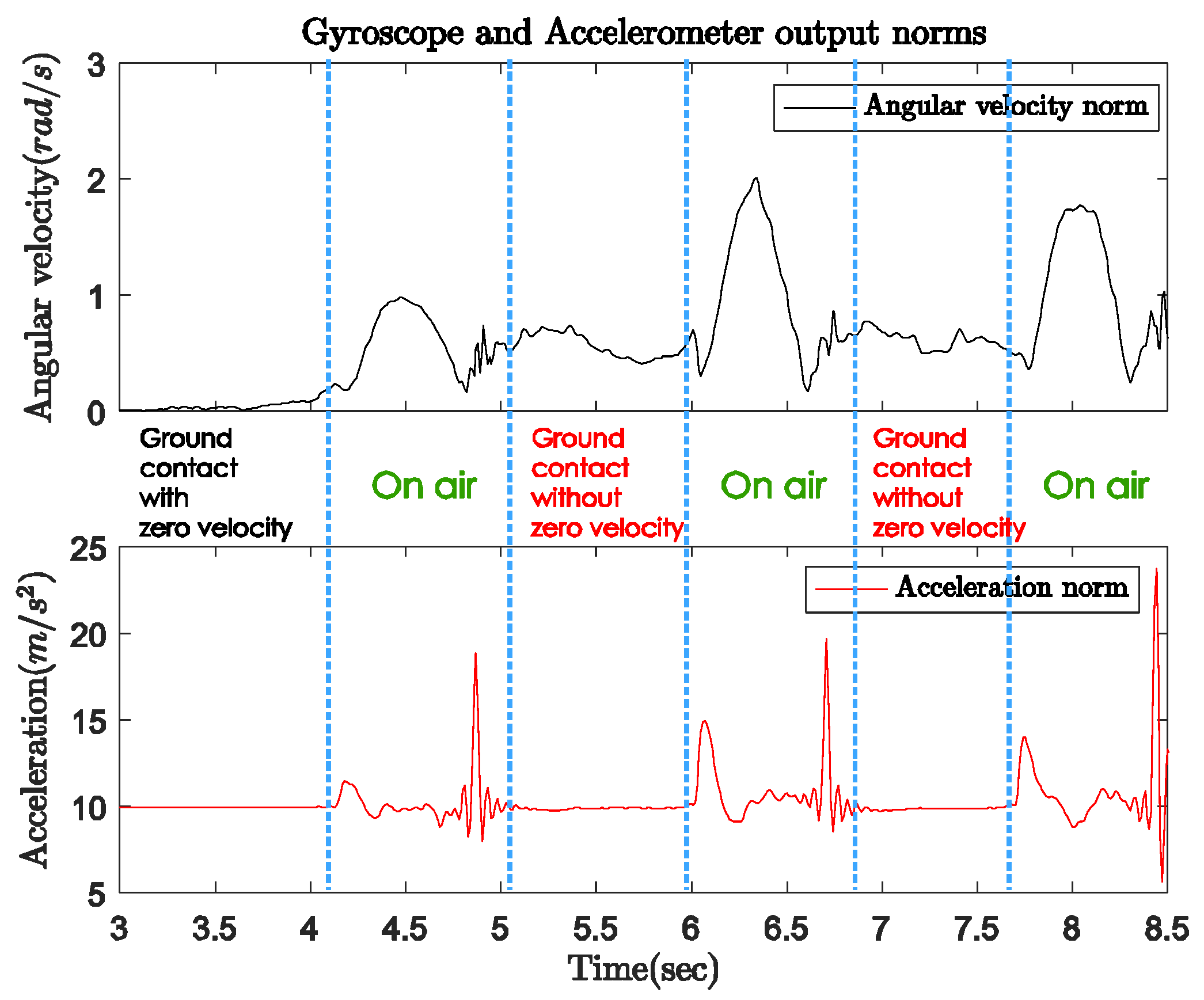
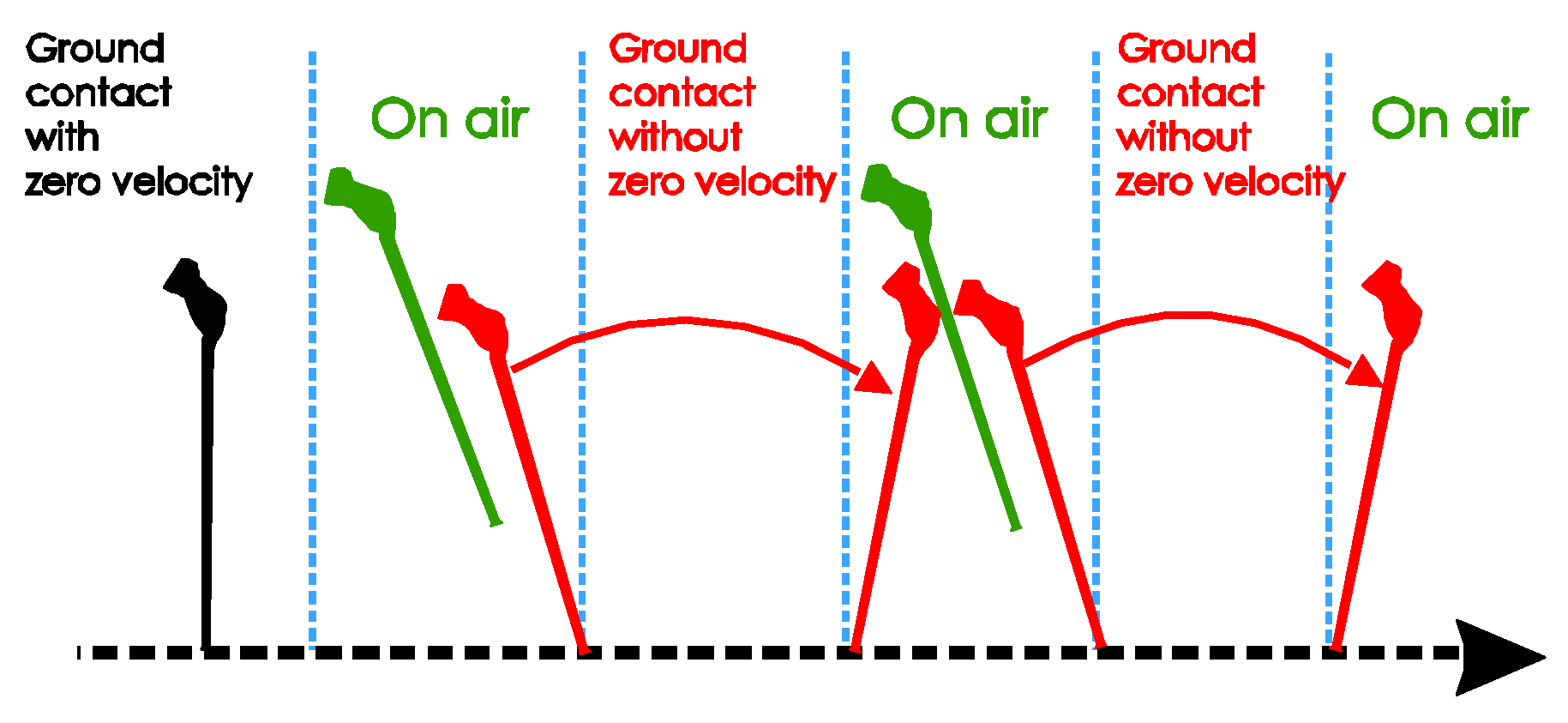
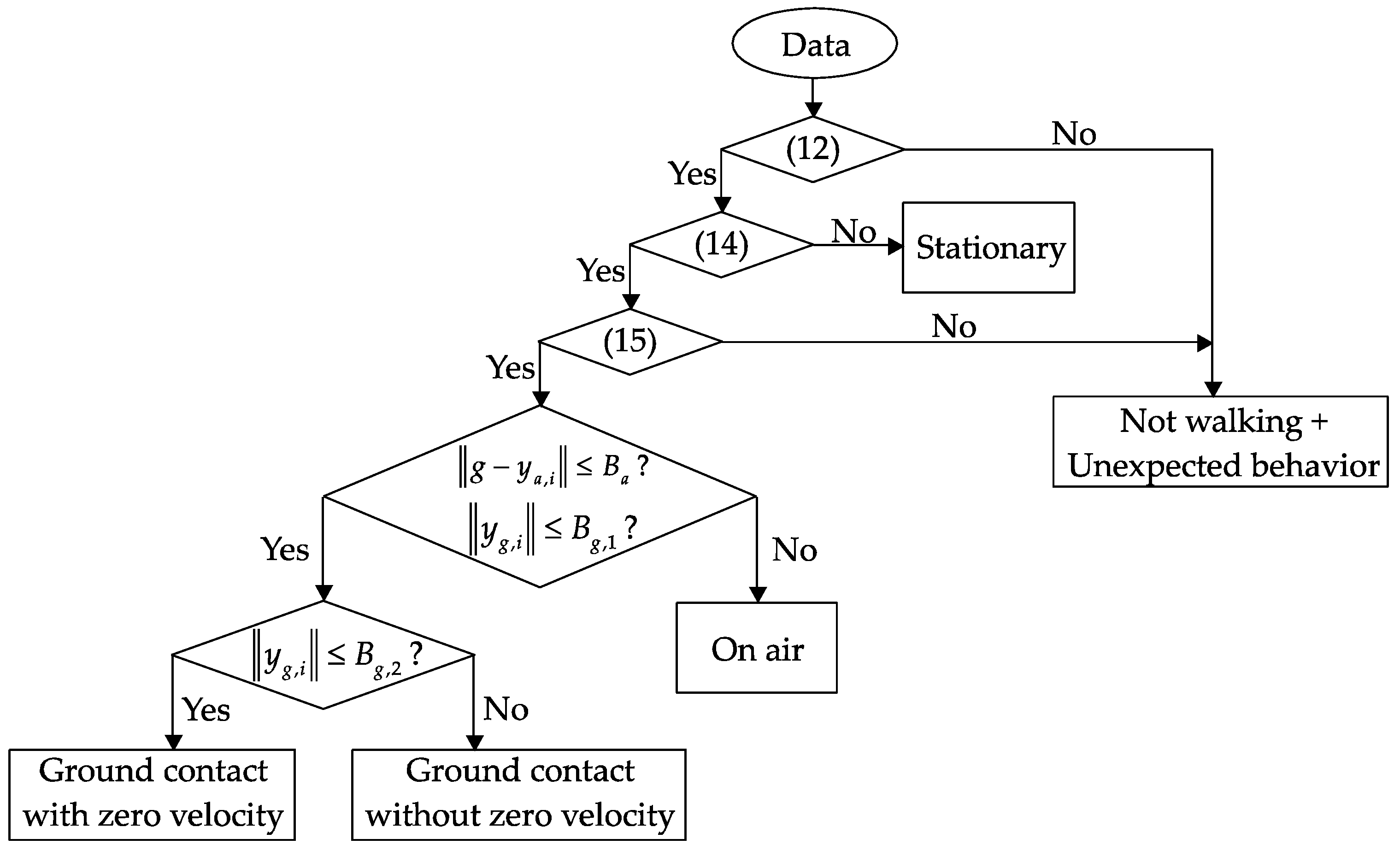
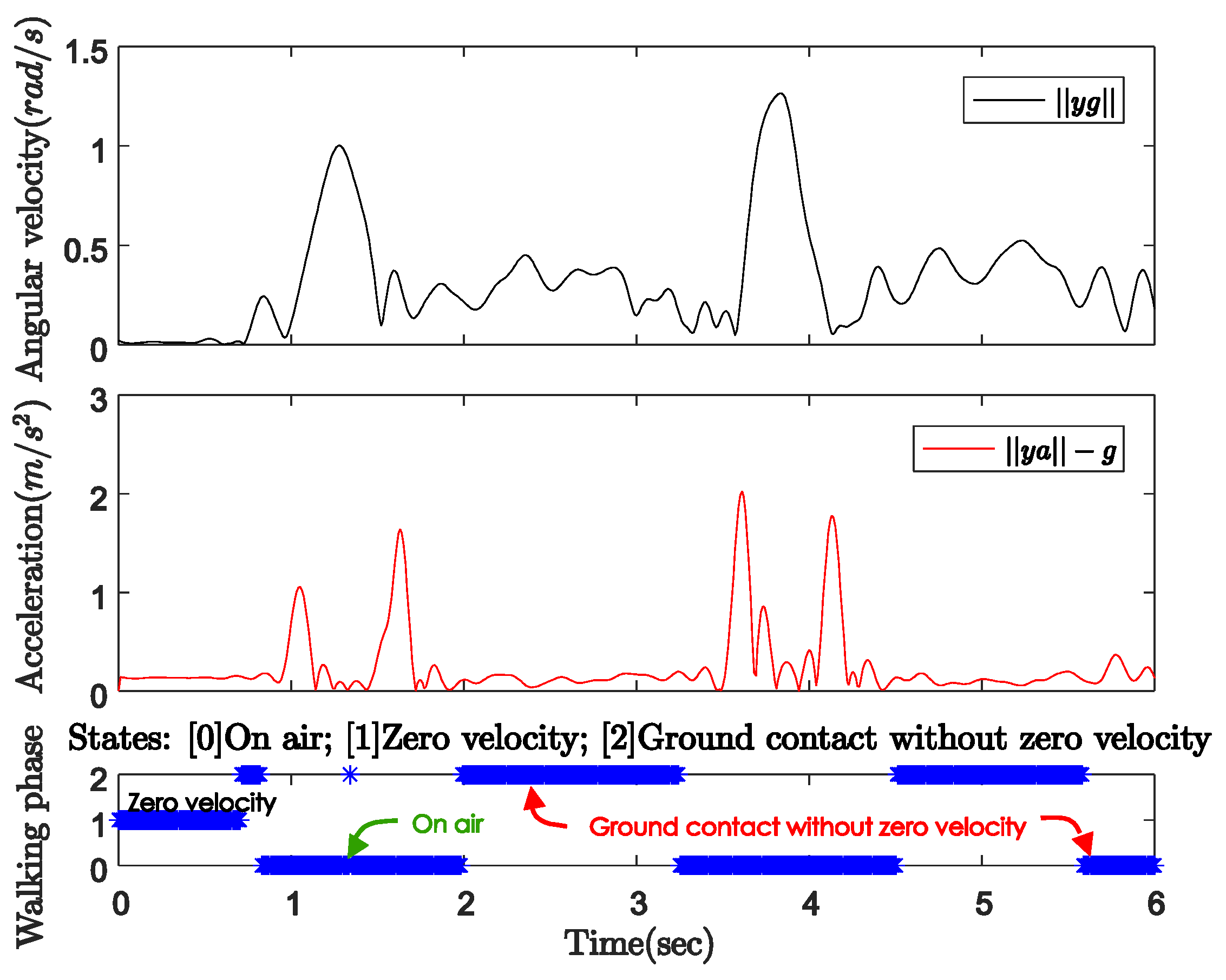
3.1.2. Standard cane
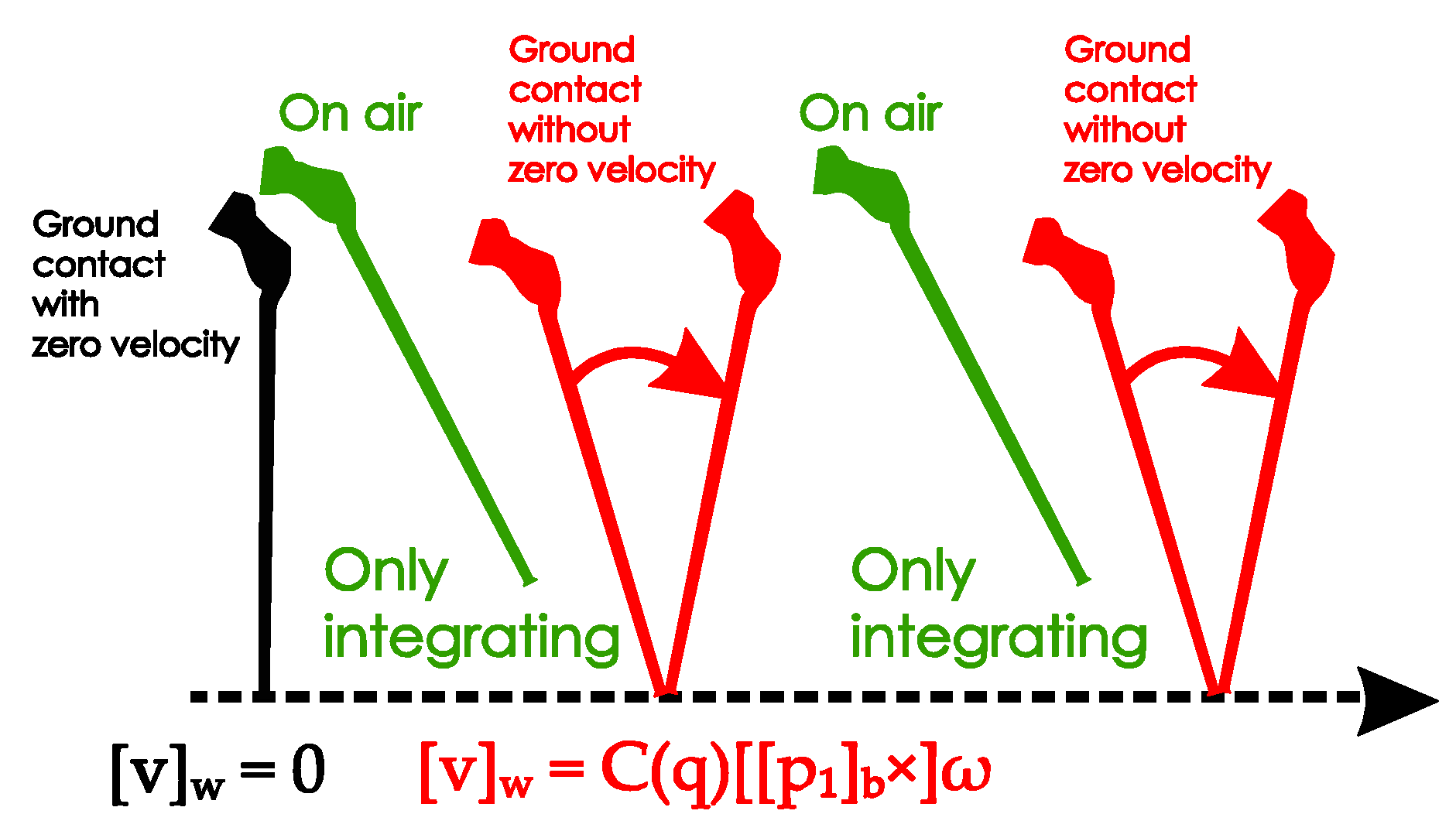
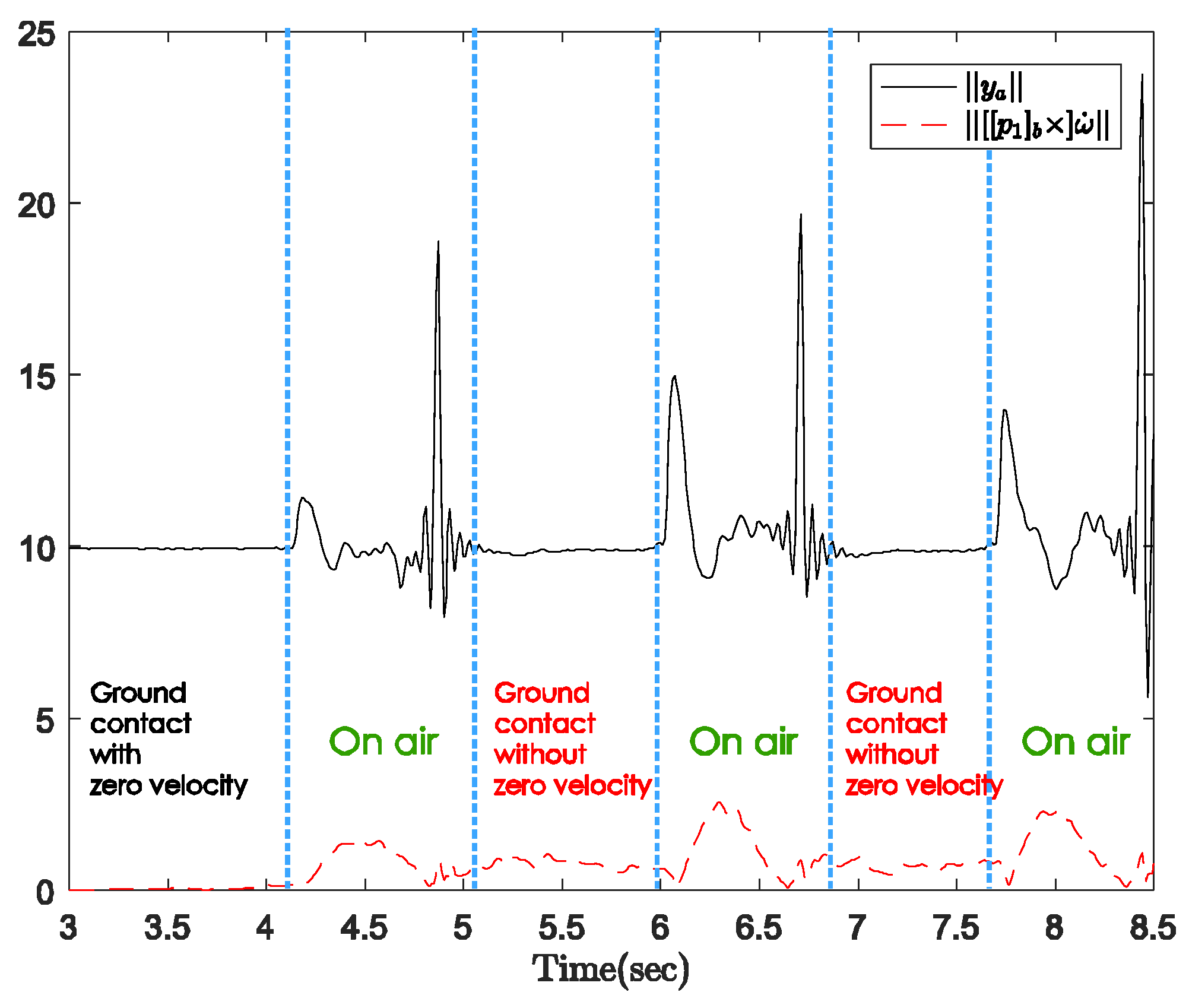
- Ground contact with zero-velocity interval: the cane’s tip is on the ground and the cane is not moving or swinging.
- On air (swing): the cane’s tip is not on the ground and the cane is freely moving.
- Ground contact without zero-velocity interval: the cane’s tip is on the ground and the cane movement can be modeled as an inverted pendulum.
- Ground contact with zero-velocity interval: No external acceleration and no angular velocity.
- Ground contact without zero-velocity interval: Occurs after contact shock moment, very small external acceleration, angular velocity can be assumed as constant.
- On air (swing): Before contact shock moment, acceleration and angular velocity are significant.
3.2. Standard Inertial Navigation Using Indirect Kalman Filter
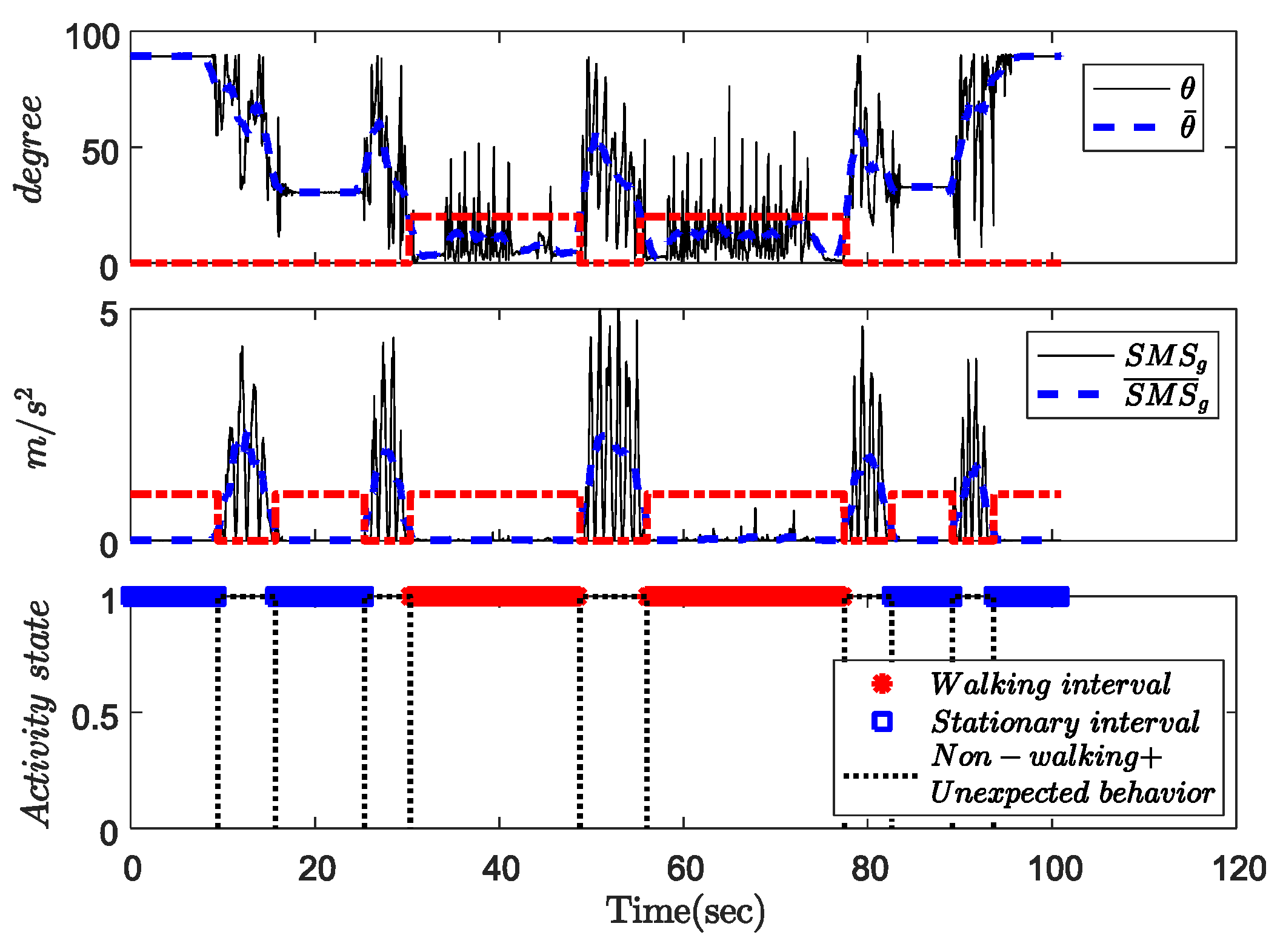
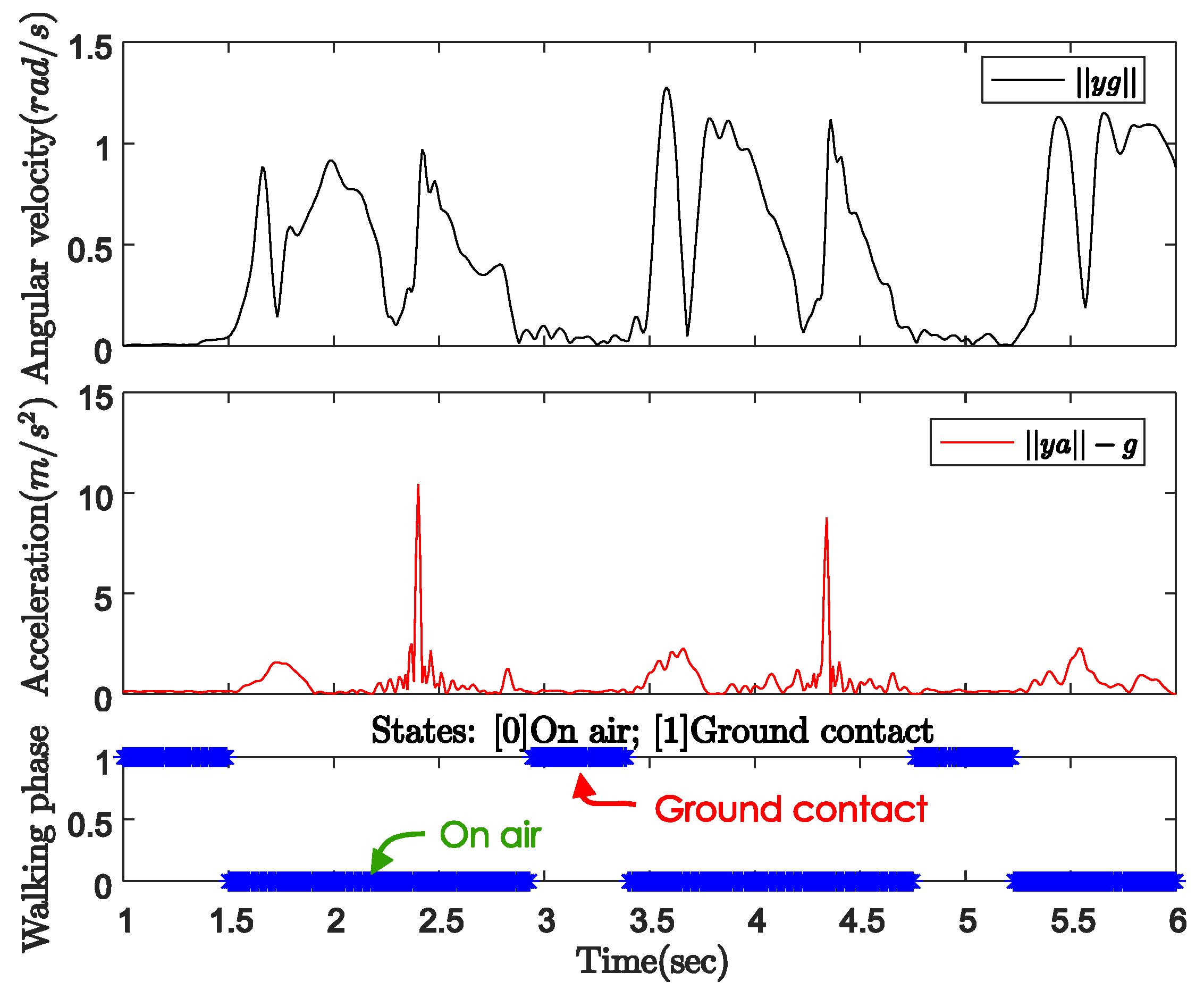
3.3. Walking Phase Classification
- First criterion: a walking interval is detected using (12) and (14).
- Second criterion: the duration satisfies:
- The cane is lying on the table
- Lifting the cane up and doing some random waving actions
- Leaning the cane on the table
- Lifting and holding the cane against the ground and preparing to walk
- Walking along a straight line
- Stopping and turning around
- Standing still and doing some waving actions
- Stopping waving and starting to walk freely
- Stopping walking and doing some waving actions
- Stopping waving and leaning the cane on the table
- Lifting the cane up and putting it on a table.
3.4. Measurement Updating
3.5. Walking Distance Estimation Based on Measurement Update
4. Experiments and Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bruun, G. Mobility aids, proposal for research and development. In Development of Electronic Aids for the Visually Impaired; Emiliani, P.L., Ed.; Springer: Dordrecht, The Netherlands, 1986; pp. 265–273. [Google Scholar]
- Wikipedia Contributors. Mobility Aid. Wikipedia, The Free Encyclopedia. Available online: https://en.wikipedia.org/w/index.php?title=Mobility_aid&oldid=790371055 (accessed on 20 November 2017).
- Bateni, H.; Maki, B.E. Assistive devices for balance and mobility: Benefits, demands, and adverse consequences. Arch. Phys. Med. Rehabil. 2005, 86, 134–145. [Google Scholar] [CrossRef] [PubMed]
- Faruqui, S.R.; Jaeblon, T. Ambulatory assistive devices in orthopaedics: Uses and modifications. J. Am. Acad. Orthop. Surg. 2010, 18, 41–50. [Google Scholar] [CrossRef] [PubMed]
- Salminen, A.L.; Brandt, A.; Samuelsson, K.; Toytari, O.; Malmivaara, A. Mobility devices to promote activity and participation: A systematic review. J. Rehabil. Med. 2009, 41, 697–706. [Google Scholar] [CrossRef] [PubMed]
- Wikipedia Contributors. Population Ageing. Wikipedia, The Free Encyclopedia. Available online: https://en.wikipedia.org/w/index.php?title=Population_ageing&oldid=815340799 (accessed on 20 November 2017).
- Kaye, H.S.; Kang, T.; LaPlante, M.P. Mobility device use in the United States. In Disability Statistics Report (14); Department of Education, National Institute on Disability and Rehabilitation Research: Washington, DC, USA, 2000; Volume 14, p. 60. [Google Scholar]
- Whittle, M.W. Chapter 3—Pathological and other abnormal gaits. In Gait Analysis, 4th ed.; Butterworth-Heinemann: Edinburgh, UK, 2007; pp. 101–136. [Google Scholar]
- Bradley, S.M.; Hernandez, C.R. Geriatric assistive devices. Am. Fam. Phys. 2011, 84, 405–411. [Google Scholar]
- Wade, J.; Beccani, M.; Myszka, A.; Bekele, E.; Valdastri, P.; Flemming, P.; Riesthal, M.D.; Withrow, T.; Sarkar, N. Design and Implementation of an Instrumented Cane for Gait Recognition. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5904–5909. [Google Scholar]
- Choi, Y.; Ralhan, A.S.; Ko, S. A study on machine learning algorithms for fall detection and movement classification. In Proceedings of the 2011 International Conference on Information Science and Applications, Jeju Island, Korea, 26–29 April 2011; pp. 1–8. [Google Scholar]
- Dinh, A.; Shi, Y.; Teng, D.; Ralhan, A.; Chen, L.; Dal Bello-Haas, V.; Basran, J.; Ko, S.-B.; McCrowsky, C. A fall and near-fall assessment and evaluation system. Open Biomed. Eng. J. 2009, 3, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Lee, R.Y.W.; Carlisle, A.J. Detection of falls using accelerometers and mobile phone technology. Age Ageing 2011, 40, 690–696. [Google Scholar] [CrossRef] [PubMed]
- Lan, M.; Nahapetian, A.; Vahdatpour, A.; Au, L.; Kaiser, W.; Sarrafzadeh, M. Smartfall: An automatic fall detection system based on subsequence matching for the smartcane. In Proceedings of the Fourth International Conference on Body Area Networks, ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), Los Angeles, CA, USA, 1–3 April 2009; pp. 1–8. [Google Scholar]
- Almeida, O.; Zhang, M.; Liu, J.C. Dynamic fall detection and pace measurement in walking sticks. In Proceedings of the 2007 Joint Workshop on High Confidence Medical Devices, Software, and Systems and Medical Device Plug-and-Play Interoperability (HCMDSS-MDPnP 2007), Cambridge, MA, USA, 25–27 June 2007; pp. 204–206. [Google Scholar]
- Huang, J.; Di, P.; Wakita, K.; Fukuda, T.; Sekiyama, K. Study of fall detection using intelligent cane based on sensor fusion. In Proceedings of the 2008 International Symposium on Micro-NanoMechatronics and Human Science, Nagoya, Japan, 6–9 November 2008; pp. 495–500. [Google Scholar]
- Wu, W.; Au, L.; Jordan, B.; Stathopoulos, T.; Batalin, M.; Kaiser, W.; Vahdatpour, A.; Sarrafzadeh, M.; Fang, M.; Chodosh, J. The smartcane system: An assistive device for geriatrics. In Proceedings of the ICST 3rd International Conference on Body Area networks, ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), Tempe, AZ, USA, 13–17 March 2008; pp. 1–4. [Google Scholar]
- Au, L.K.; Wu, W.H.; Batalin, M.A.; Stathopoulos, T.; Kaiser, W.J. Demonstration of active guidance with smartcane. In Proceedings of the 2008 International Conference on Information Processing in Sensor Networks (IPSN 2008), St. Louis, MO, USA, 22–24 April 2008; pp. 537–538. [Google Scholar]
- Culmer, P.R.; Brooks, P.C.; Strauss, D.N.; Ross, D.H.; Levesley, M.C.; O’Connor, R.J.; Bhakta, B.B. An instrumented walking aid to assess and retrain gait. IEEE/ASME Trans. Mechatron. 2014, 19, 141–148. [Google Scholar] [CrossRef]
- Van Hook, F.W.; Demonbreun, D.; Weiss, B.D. Ambulatory devices for chronic gait disorders in the elderly. Am. Fam. Phys. 2003, 67, 1717–1724. [Google Scholar]
- Suh, Y.S.; Nemati, E.; Sarrafzadeh, M. Kalman-filter-based walking distance estimation for a smart-watch. In Proceedings of the 2016 IEEE First International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Washington, DC, USA, 27–29 June 2016; pp. 150–156. [Google Scholar]
- Wang, J.S.; Lin, C.W.; Yang, Y.T.C.; Ho, Y.J. Walking pattern classification and walking distance estimation algorithms using gait phase information. IEEE Trans. Biomed. Eng. 2012, 59, 2884–2892. [Google Scholar] [CrossRef] [PubMed]
- Park, S.K.; Suh, Y.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef] [PubMed]
- Ho, N.-H.; Truong, H.P.; Jeong, G.-M. Step-detection and adaptive step-length estimation for pedestrian dead-reckoning at various walking speeds using a smartphone. Sensors 2016, 16, 1423. [Google Scholar] [CrossRef] [PubMed]
- Suh, Y.S. A smoother for attitude and position estimation using inertial sensors with zero velocity intervals. IEEE Sens. J. 2012, 12, 1255–1262. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Estimated Length (m) | Optical Tracker (m) | Absolute Error (m) |
|---|---|---|---|
| 1 | 3.418 | 3.286 | 0.132 |
| 2 | 3.346 | 3.255 | 0.091 |
| 3 | 3.322 | 3.274 | 0.049 |
| 4 | 3.374 | 3.292 | 0.083 |
| 5 | 3.367 | 3.303 | 0.064 |
| 6 | 3.380 | 3.276 | 0.105 |
| 7 | 3.374 | 3.281 | 0.093 |
| 8 | 3.405 | 3.271 | 0.134 |
| 9 | 3.155 | 3.253 | 0.099 |
| 10 | 3.397 | 3.270 | 0.127 |
| Mean | 3.354 | 3.276 | 0.098 |
| No. | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Estimated (m) | Optical Tracker (m) | Abs. Error (m) | Estimated (m) | Optical Tracker (m) | Abs. Error (m) | Estimated (m) | Optical Tracker (m) | Abs. Error (m) | |
| 1 | 2.934 | 2.848 | 0.086 | 2.823 | 2.785 | 0.038 | 2.596 | 2.790 | 0.193 |
| 2 | 2.615 | 2.537 | 0.077 | 2.541 | 2.543 | 0.002 | 2.625 | 2.547 | 0.078 |
| 3 | 2.908 | 2.898 | 0.010 | 2.596 | 2.682 | 0.086 | 2.700 | 2.901 | 0.202 |
| 4 | 2.927 | 2.877 | 0.049 | 2.883 | 2.839 | 0.043 | 2.706 | 2.908 | 0.202 |
| 5 | 2.816 | 2.764 | 0.052 | 2.600 | 2.742 | 0.142 | 2.613 | 2.794 | 0.181 |
| 6 | 2.678 | 2.675 | 0.002 | 2.758 | 2.798 | 0.040 | 2.489 | 2.732 | 0.243 |
| 7 | 2.916 | 2.834 | 0.082 | 2.809 | 2.897 | 0.088 | 2.520 | 2.754 | 0.234 |
| 8 | 2.730 | 2.701 | 0.029 | 2.787 | 2.799 | 0.013 | 2.546 | 2.827 | 0.281 |
| 9 | 2.753 | 2.726 | 0.027 | 2.806 | 2.733 | 0.073 | 2.615 | 2.784 | 0.170 |
| 10 | 2.681 | 2.763 | 0.083 | 2.734 | 2.832 | 0.098 | 2.839 | 2.767 | 0.072 |
| Mean | 2.796 | 2.762 | 0.050 | 2.733 | 2.765 | 0.062 | 2.625 | 2.780 | 0.186 |
| Person Index | Foot-Mounted Sensor | Quadripod Cane Sensor | ||
|---|---|---|---|---|
| Average Estimated Walking Distance (m) | Standard Deviation (m) | Average Estimated Walking Distance (m) | Standard Deviation (m) | |
| 1 | 172.716 | 1.043 | 169.679 | 1.114 |
| 2 | 169.661 | 0.531 | 171.142 | 0.637 |
| 3 | 170.125 | 1.019 | 170.297 | 0.969 |
| 4 | 169.476 | 1.572 | 170.140 | 1.261 |
| 5 | 169.564 | 0.862 | 170.538 | 1.047 |
| Person Index | Foot-Mounted Sensor | Standard Cane Sensor, without z-axis Position Updating | Standard Cane Sensor, with z-axis Position Updating | |||
|---|---|---|---|---|---|---|
| Average Estimated Walking Distance (m) | Standard Deviation (m) | Average Estimated Walking Distance (m) | Standard Deviation (m) | Average Estimated Walking Distance (m) | Standard Deviation (m) | |
| 1 | 170.639 | 2.114 | 172.154 | 1.480 | 172.121 | 1.496 |
| 2 | 171.679 | 0.298 | 170.963 | 1.425 | 170.884 | 1.415 |
| 3 | 169.931 | 1.085 | 171.582 | 2.576 | 171.390 | 2.683 |
| 4 | 170.603 | 1.029 | 170.435 | 1.135 | 170.432 | 1.032 |
| 5 | 170.563 | 1.439 | 170.782 | 1.781 | 170.717 | 1.549 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, D.C.; Suh, Y.S. Walking Distance Estimation Using Walking Canes with Inertial Sensors. Sensors 2018, 18, 230. https://doi.org/10.3390/s18010230
Dang DC, Suh YS. Walking Distance Estimation Using Walking Canes with Inertial Sensors. Sensors. 2018; 18(1):230. https://doi.org/10.3390/s18010230
Chicago/Turabian StyleDang, Duc Cong, and Young Soo Suh. 2018. "Walking Distance Estimation Using Walking Canes with Inertial Sensors" Sensors 18, no. 1: 230. https://doi.org/10.3390/s18010230
APA StyleDang, D. C., & Suh, Y. S. (2018). Walking Distance Estimation Using Walking Canes with Inertial Sensors. Sensors, 18(1), 230. https://doi.org/10.3390/s18010230