An IMU-Aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning


Abstract
:1. Introduction
2. System Model and Body-Shadowing Influence Analysis
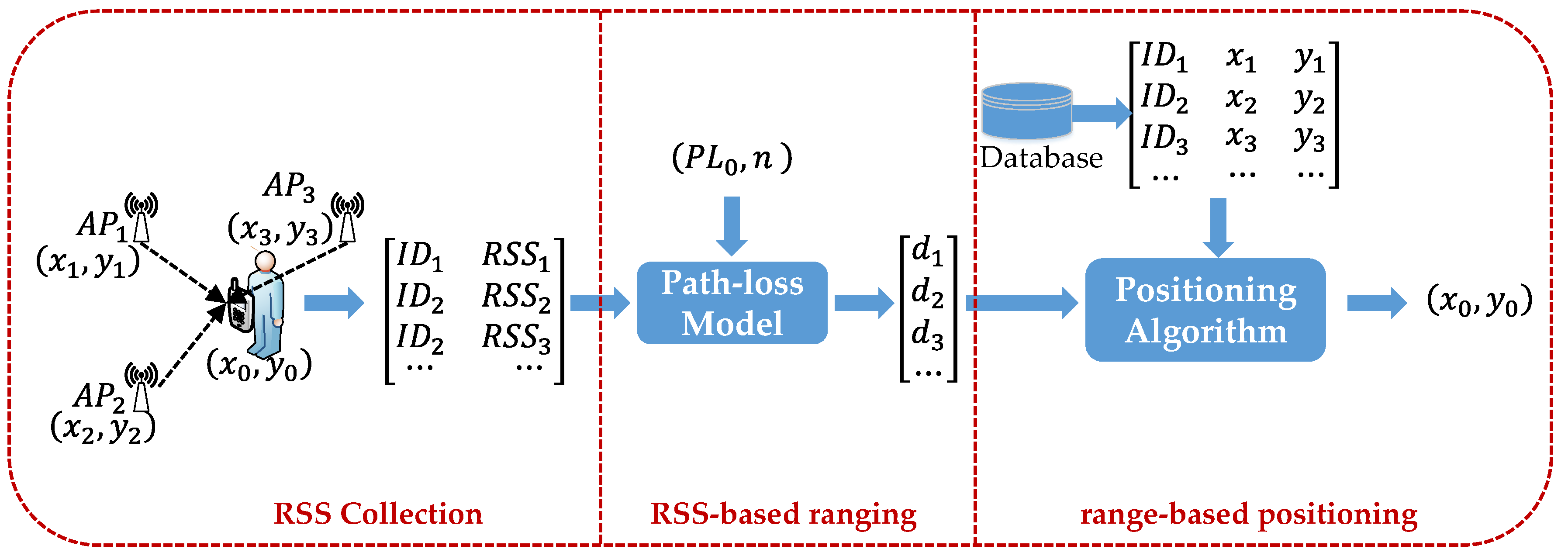
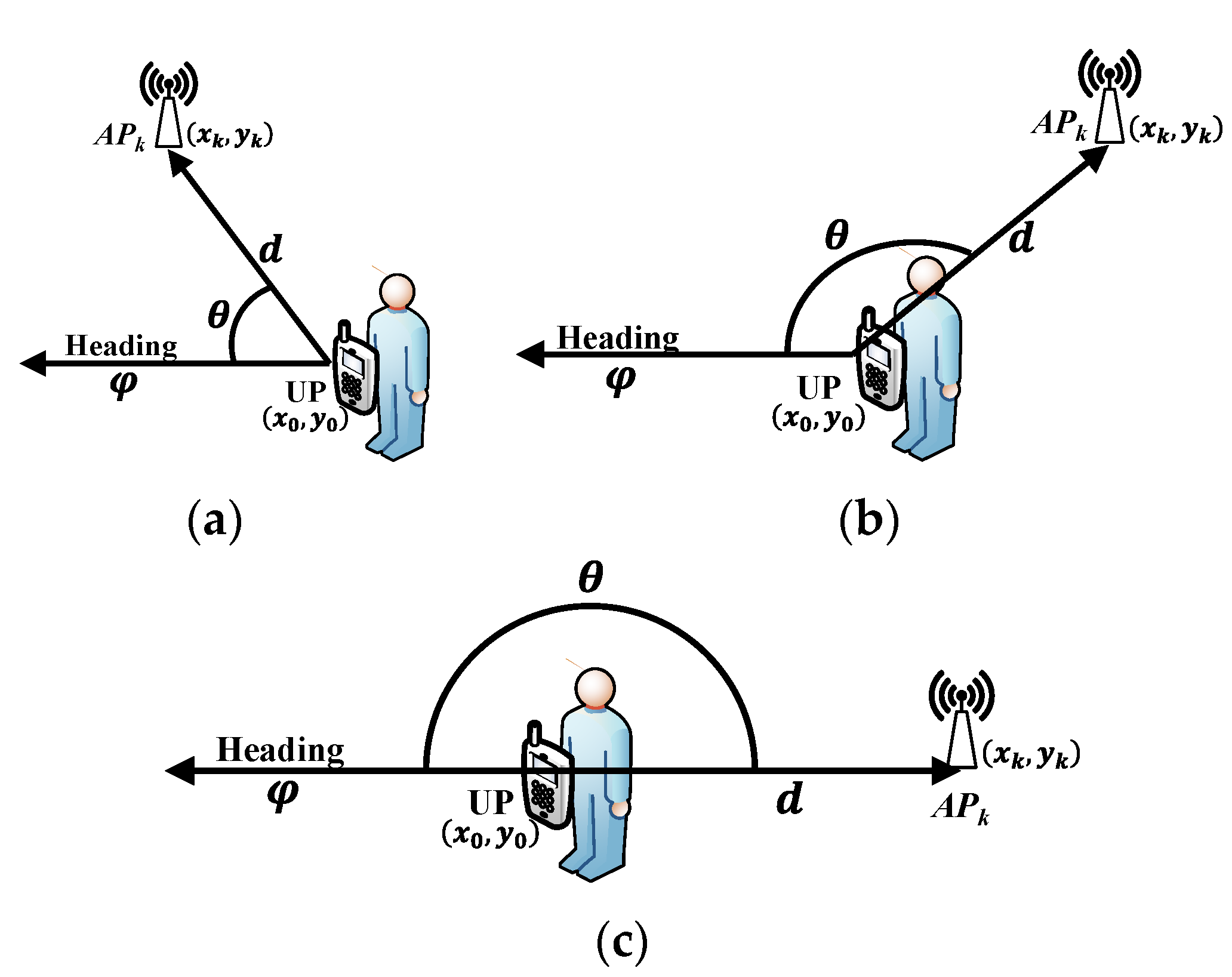
2.1. System Model
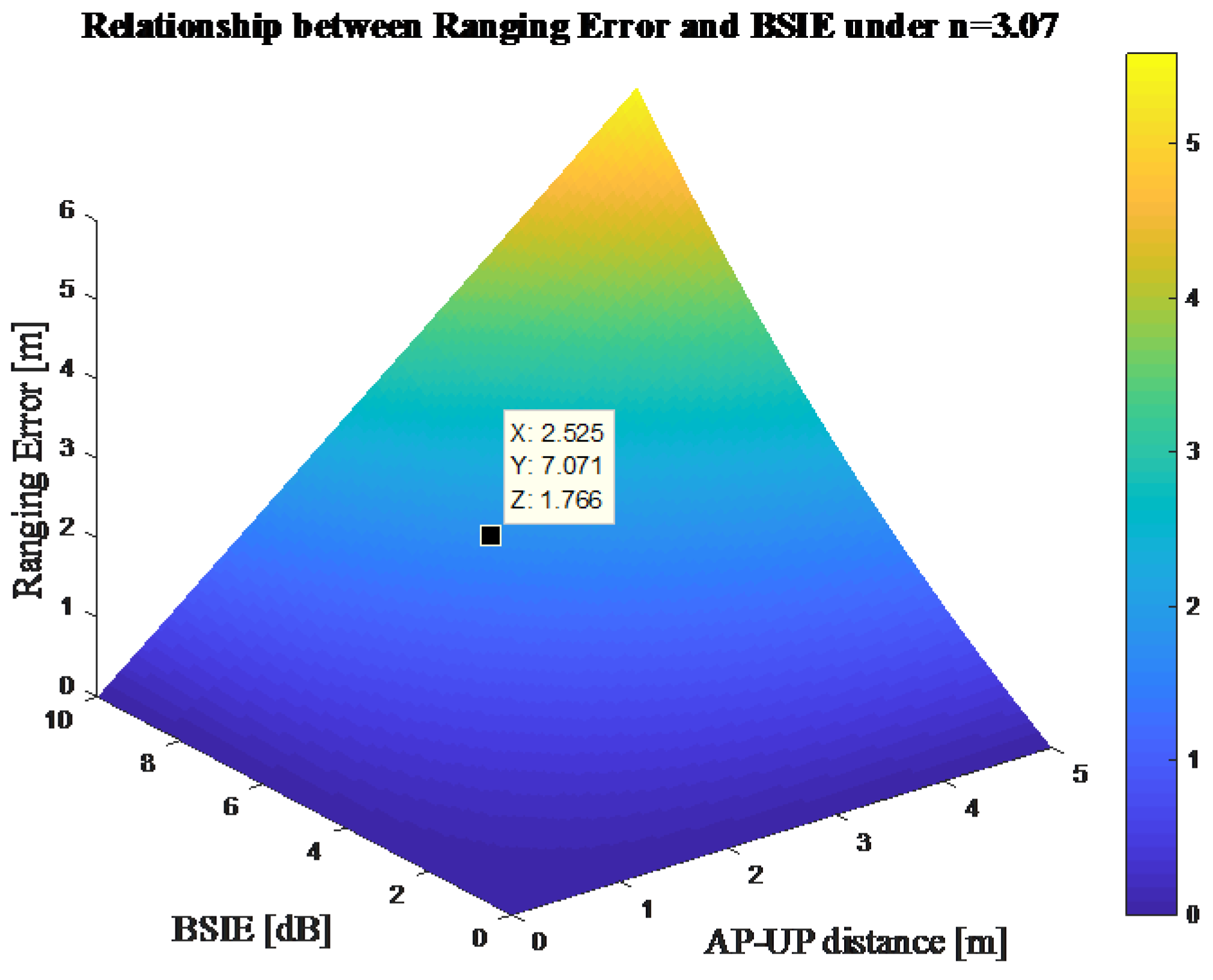
2.2. Body-Shadowing Influence on Ranging
2.3. Body-Shadowing Influence on Positioning
2.3.1. Influence on Positioning Using Trilateration
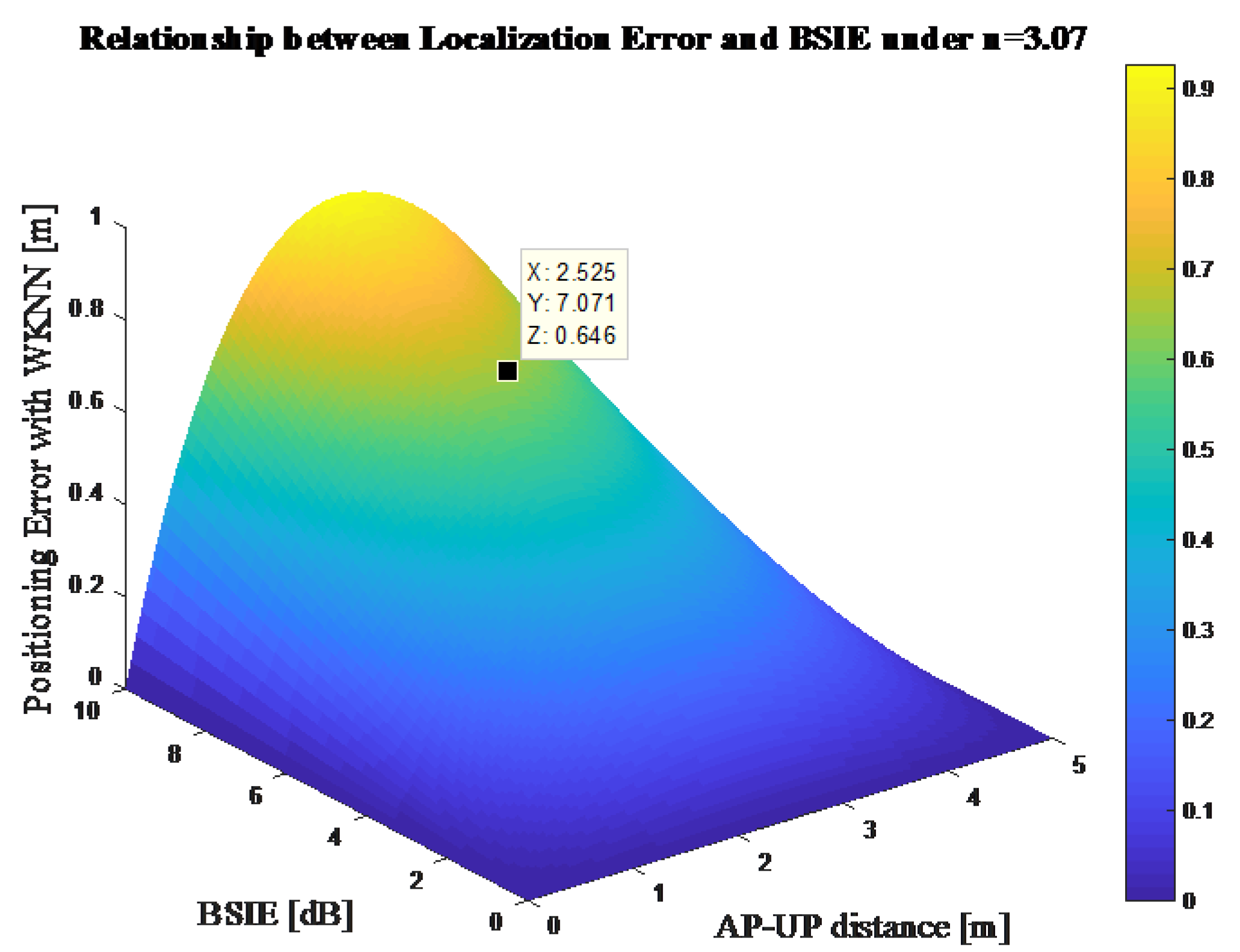
2.3.2. Influence on Positioning Using WKNN
2.4. Factors that May Affect Body-Shadowing Influence Error
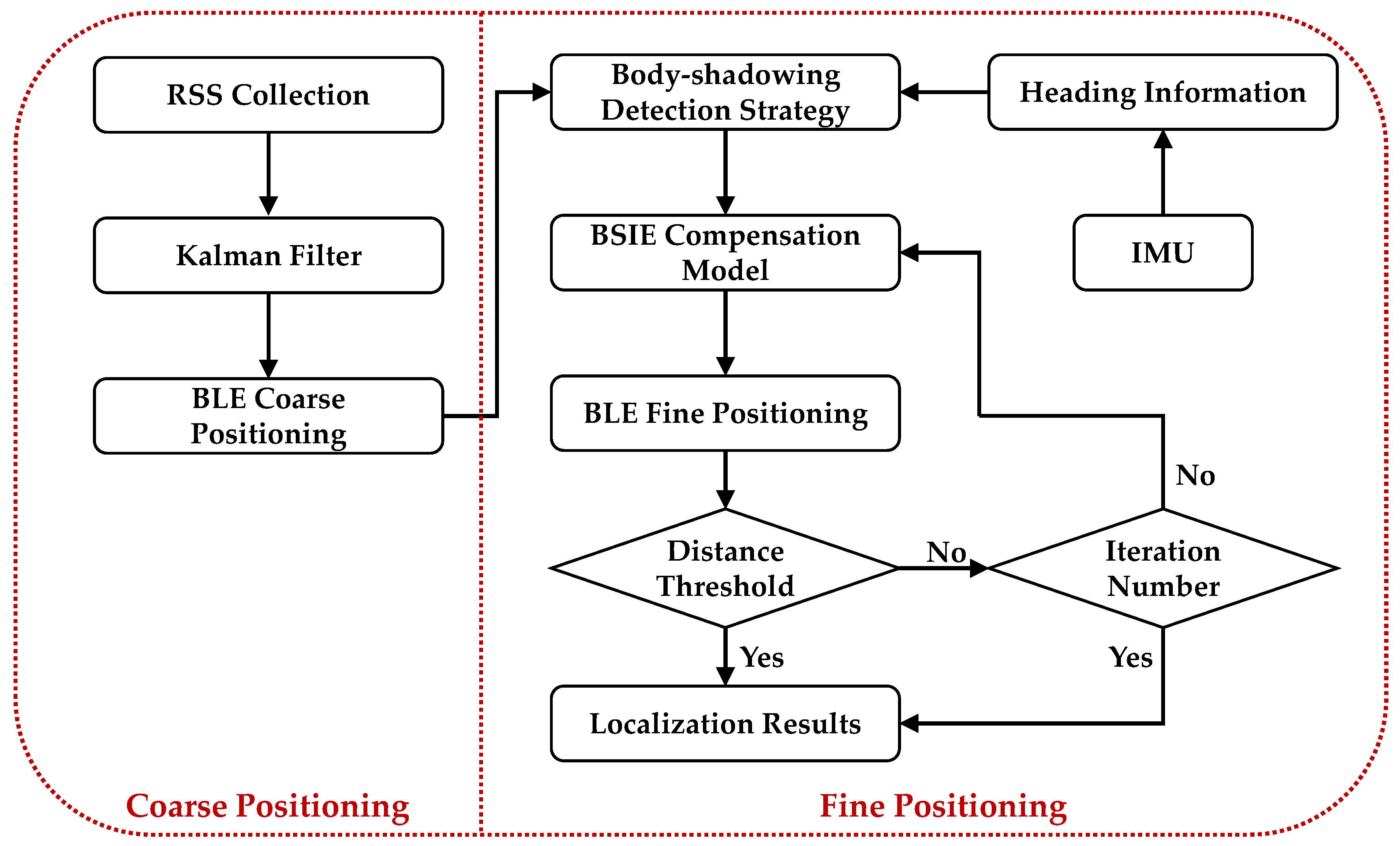
3. BLE Positioning with Body-Shadowing Error Compensation
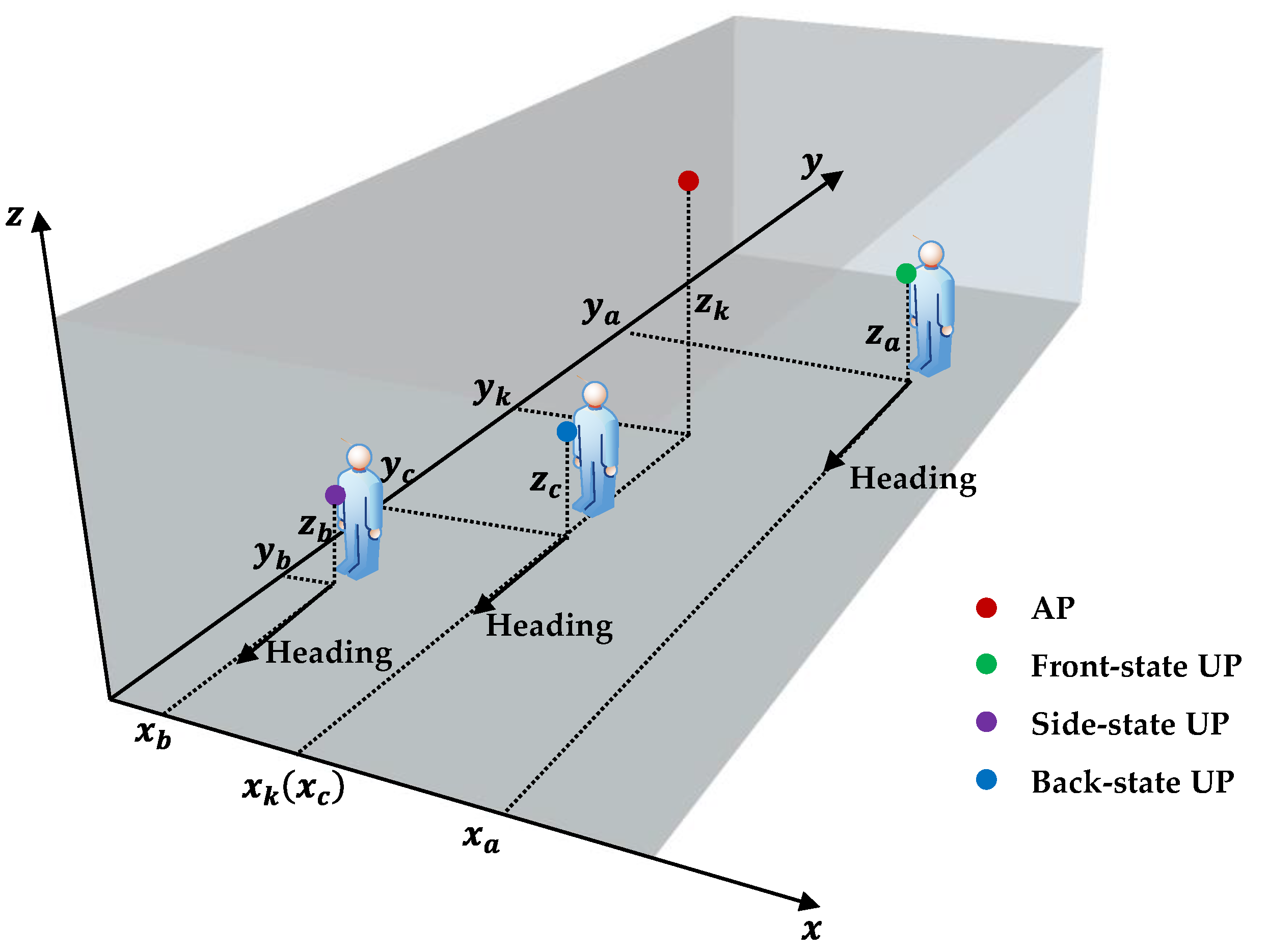
3.1. Body-Shadowing Detection Strategy
3.2. BSIE Compensation Model
3.3. BP-BEC Algorithm
4. Experiments and Results
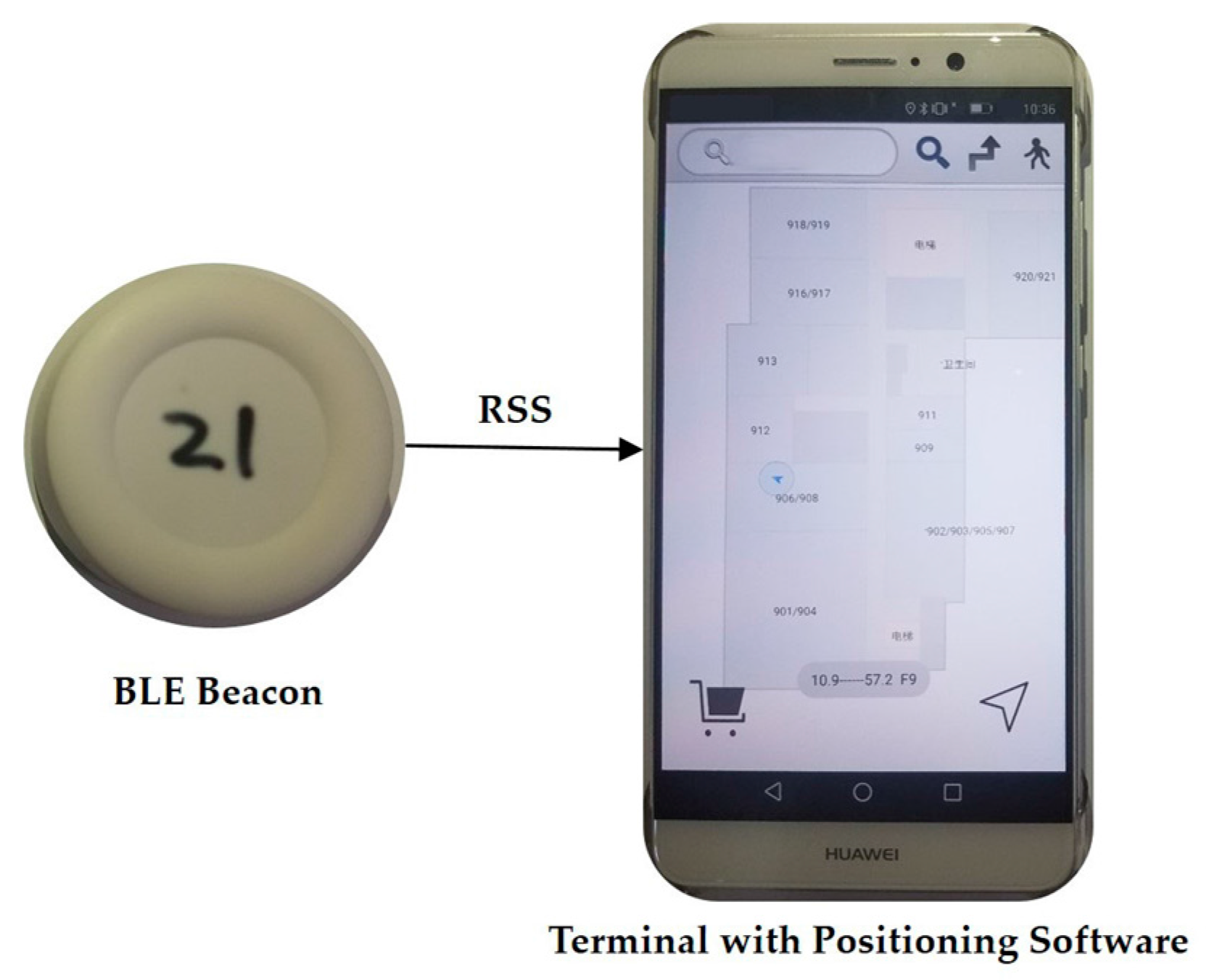
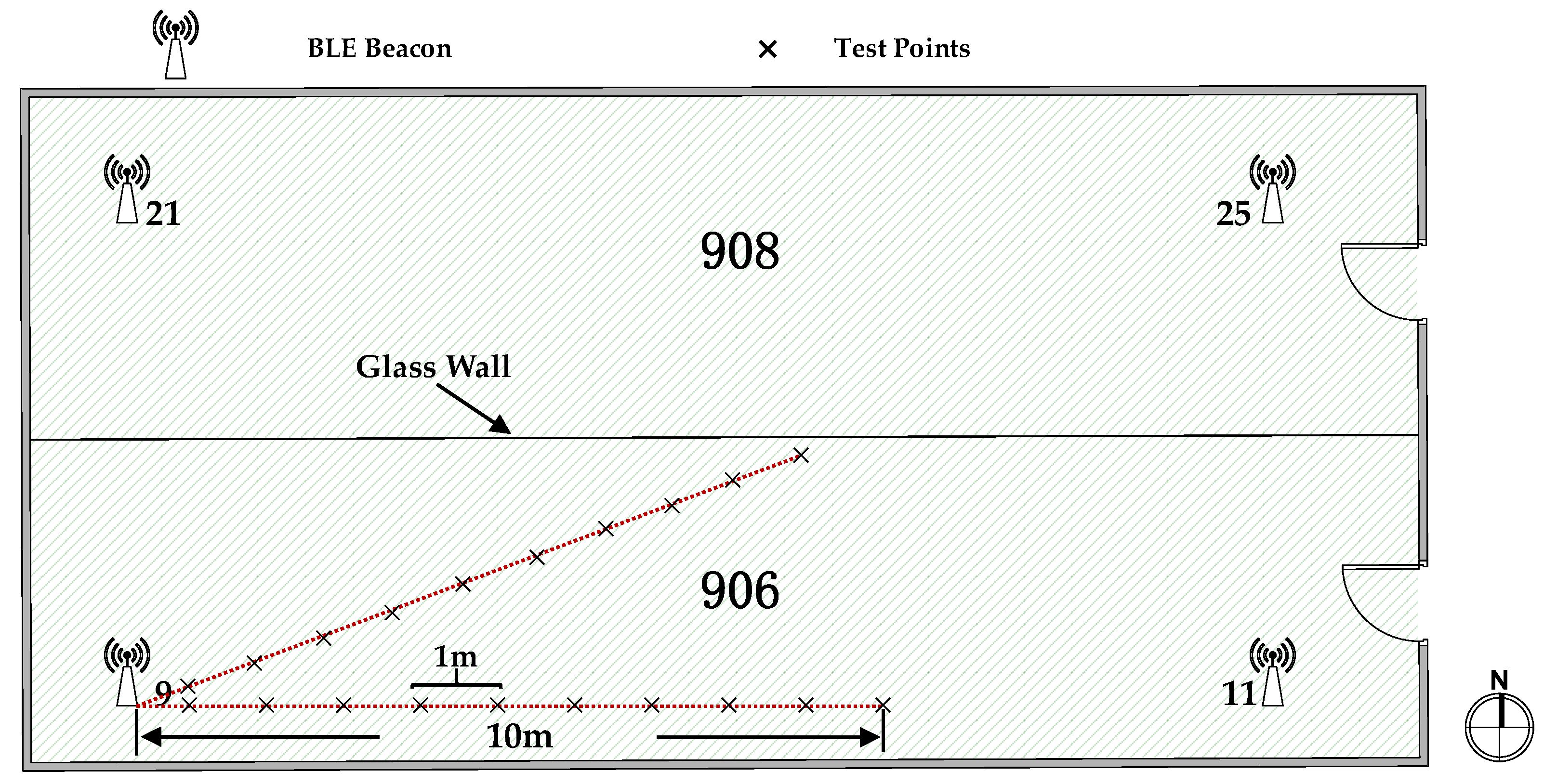
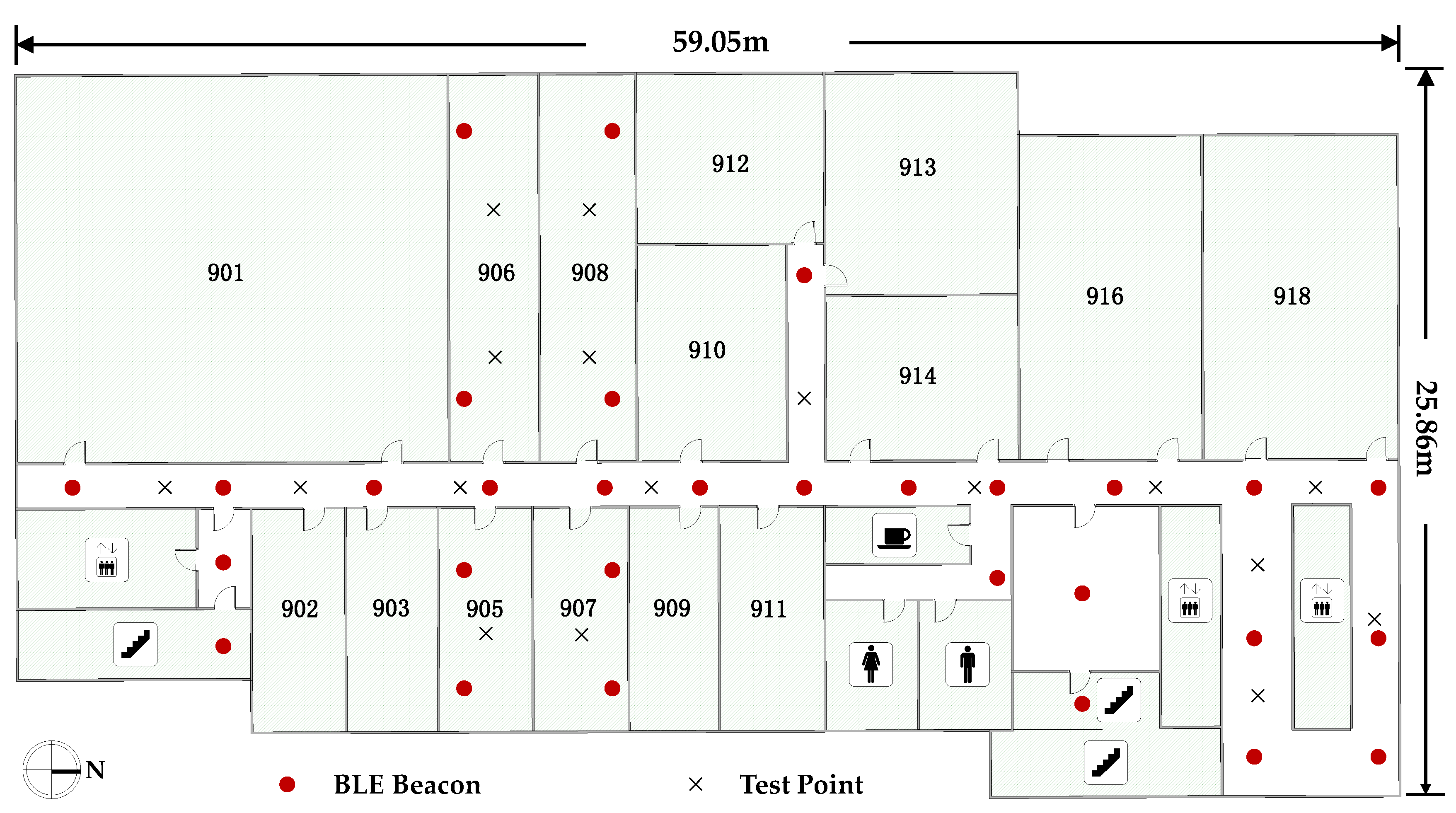
4.1 Experimental Scenario and Implementation
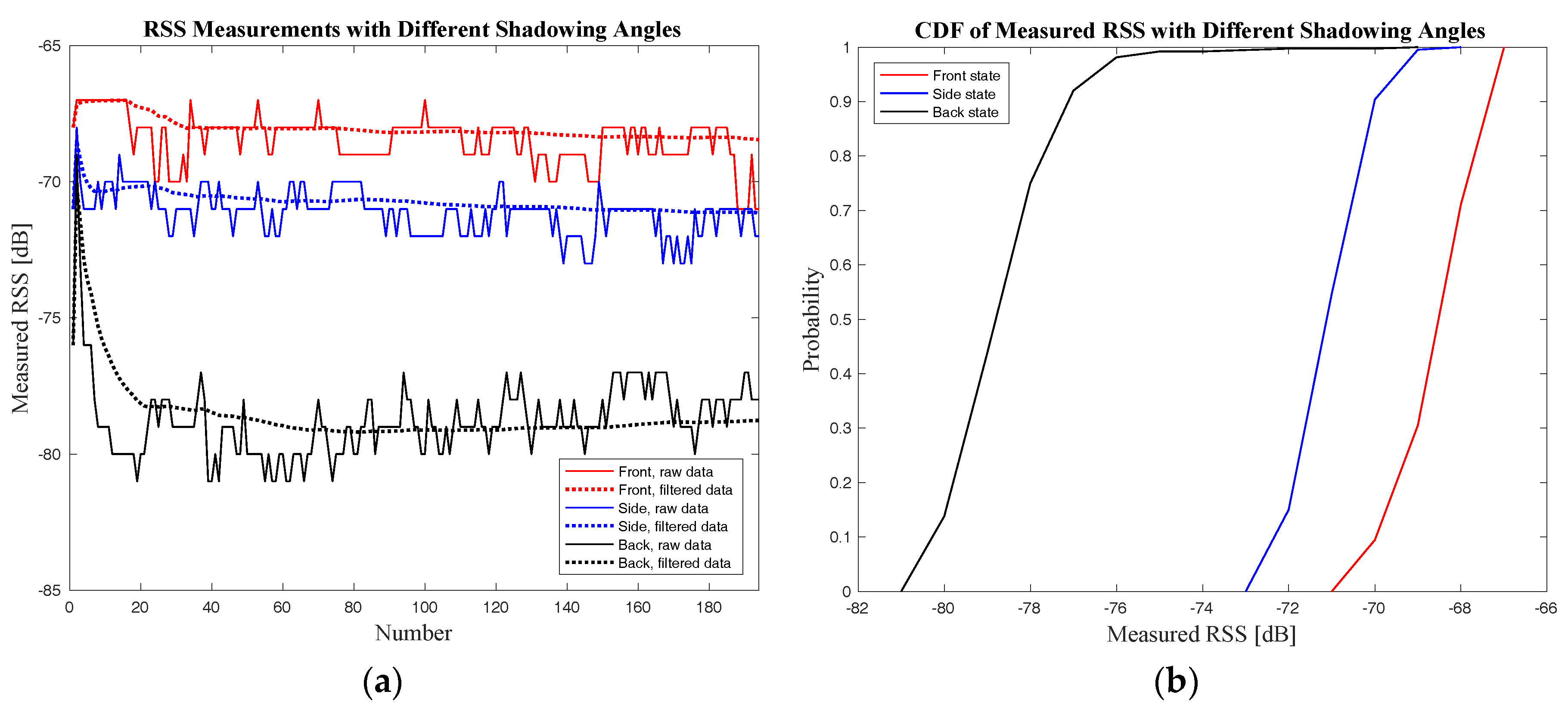
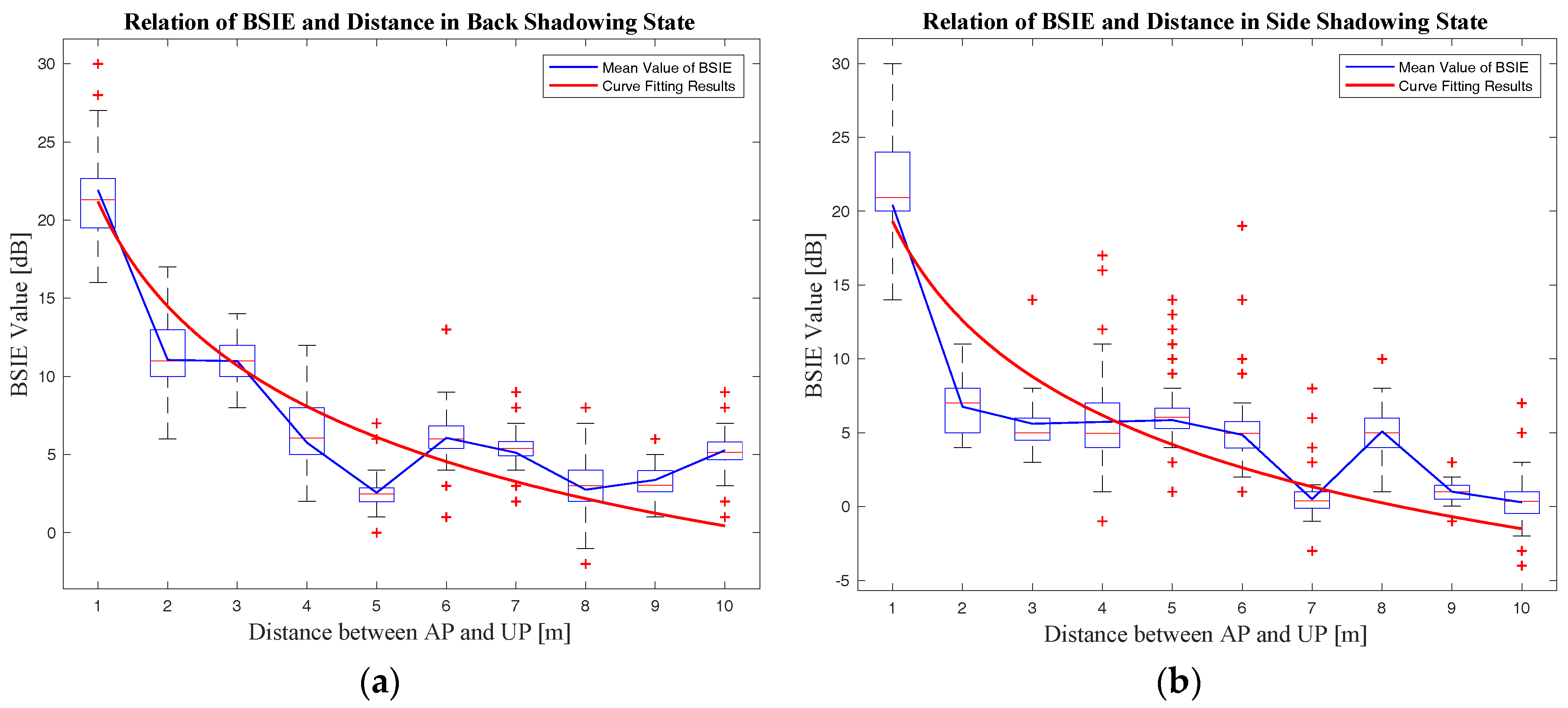
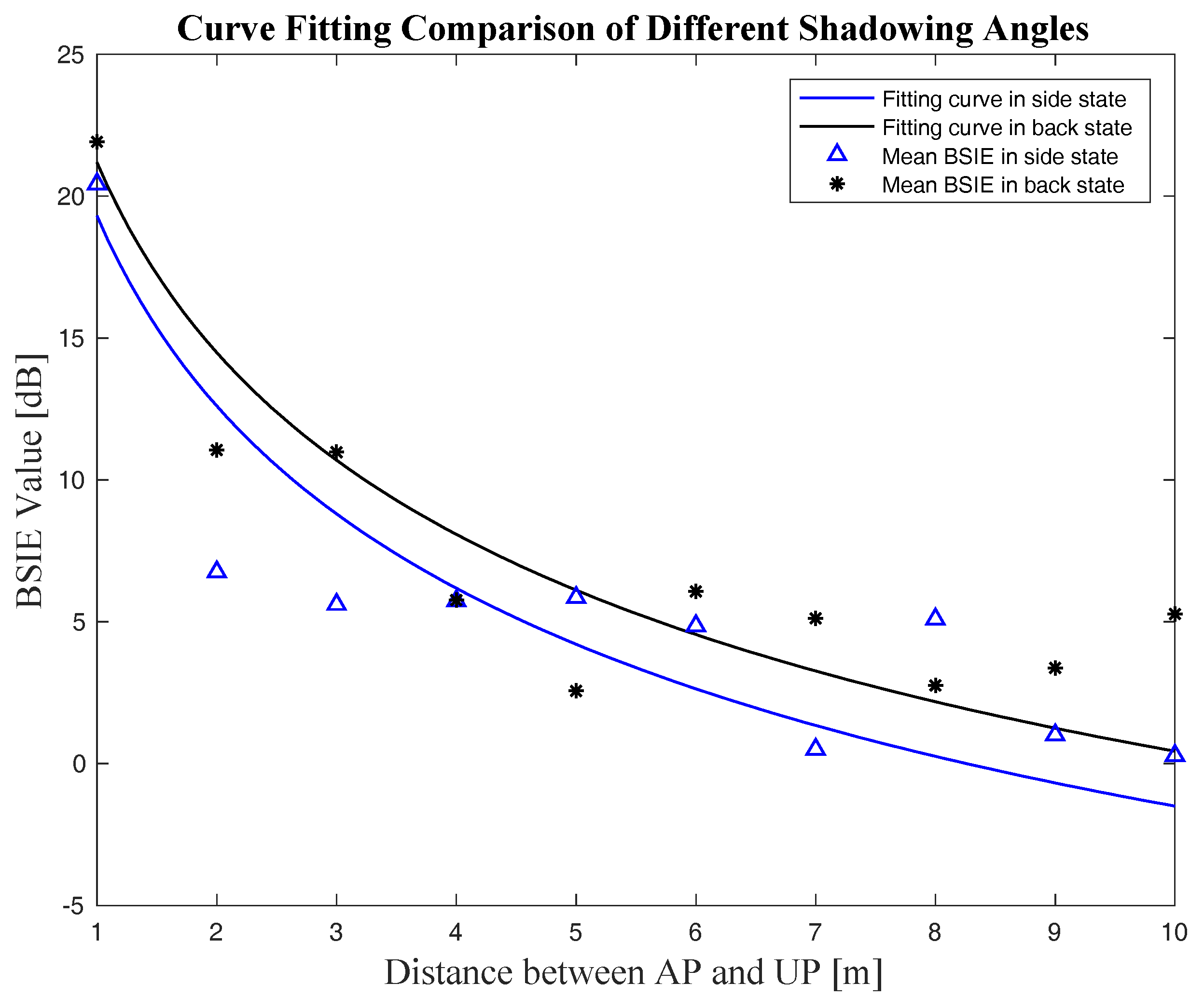
4.2. BSIE Evaluation and Analysis
4.3. Positioning Performance Evaluation and Analysis
4.3.1. Performance Evaluation Indicators
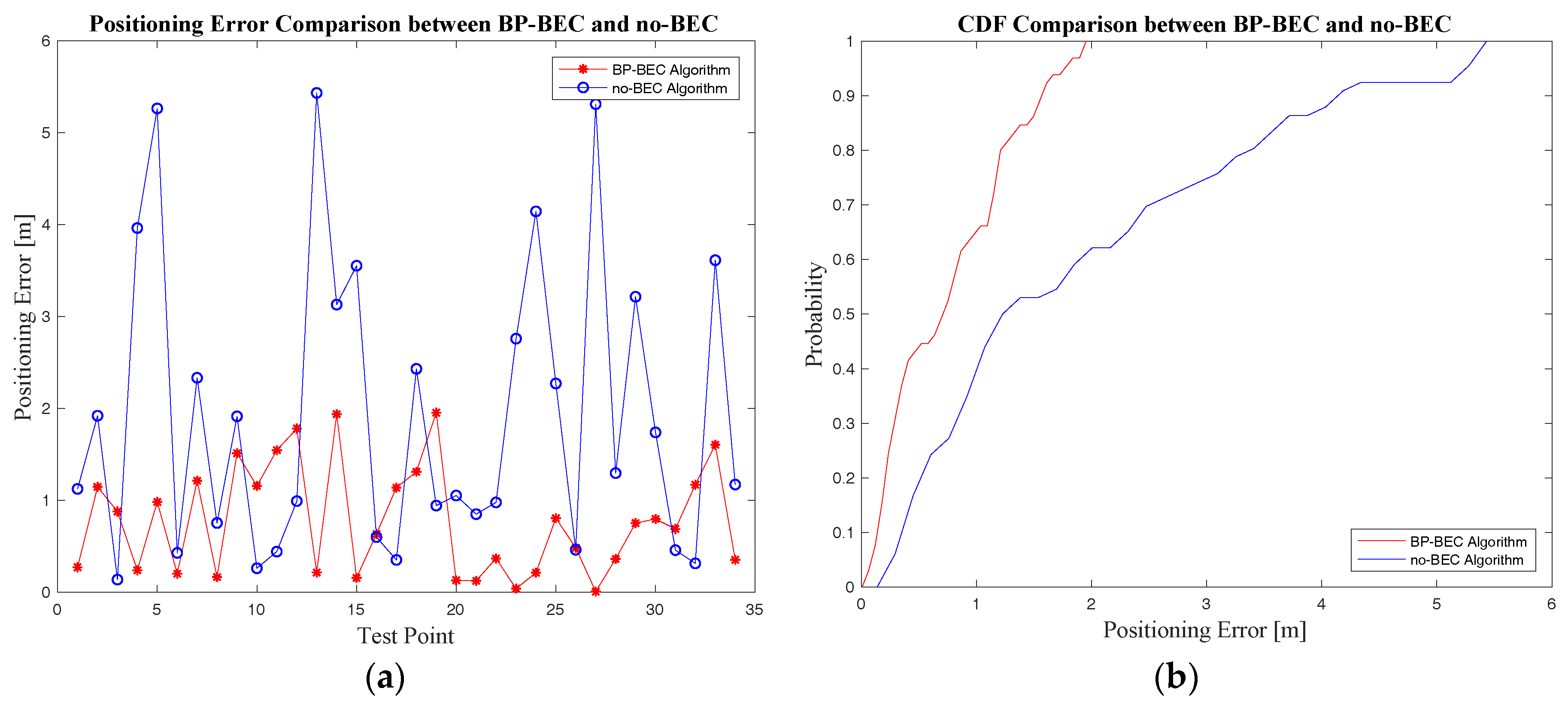
4.3.2. Positioning Accuracy Measurements and Analysis
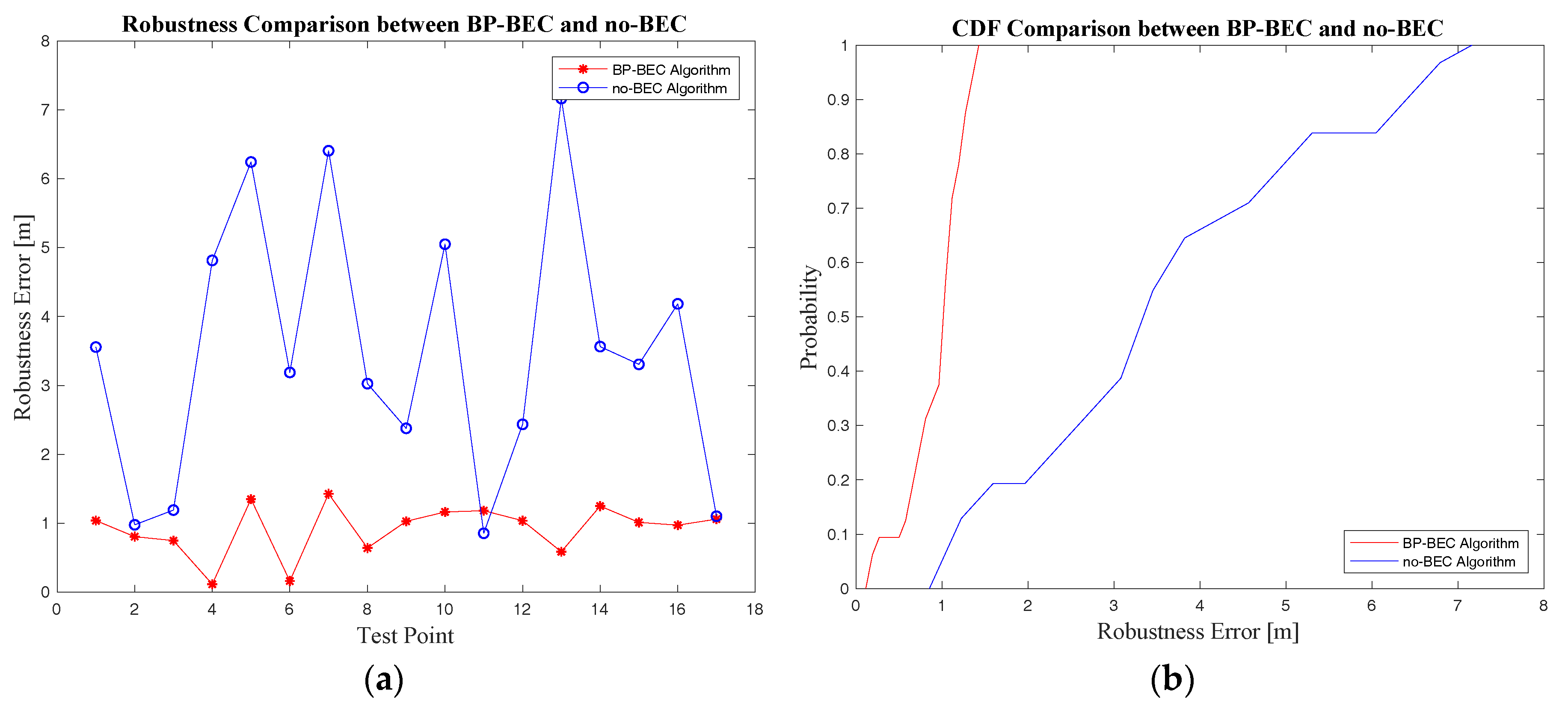
4.3.3. Positioning Robustness Evaluation and Analysis
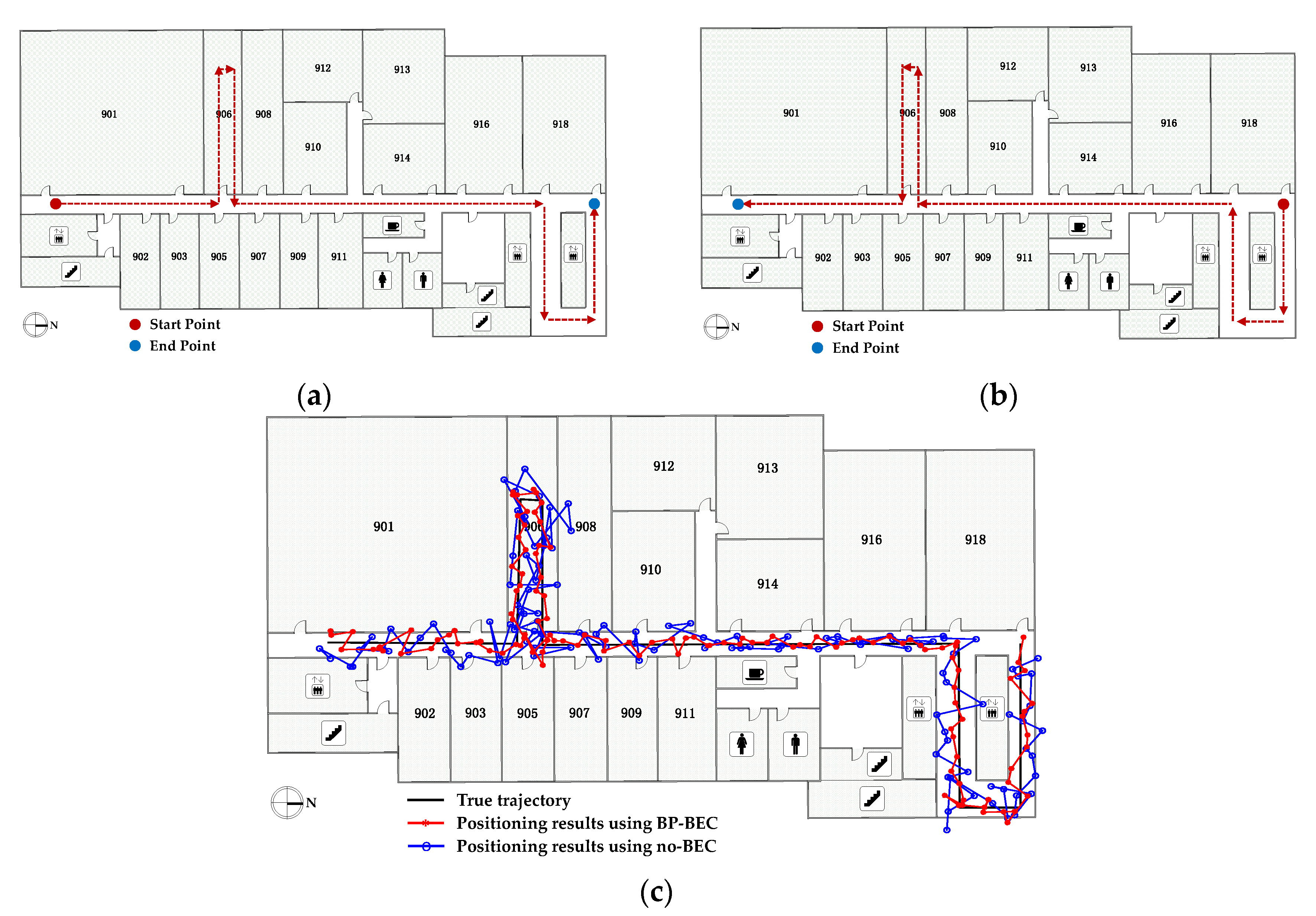
4.3.4. Positioning Evaluation under a Dynamic Situation
4.4. Discussion of the Strengths and Weaknesses of the Proposed Method
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- ABI Research. Indoor Location in Retail: Where Is the Money? Available online: http://www.abiresearch.com/market-research/service/location-technologies/ (accessed on 12 May 2015).
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localisation systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Hossain, A.K.M.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Raharijaona, T.; Mawonou, R.; Nguyen, T.V.; Colonnier, F.; Boyron, M.; Diperi, J.; Viollet, S. Local Positioning System Using Flickering Infrared LEDs. Sensors 2017, 17, 2518. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Gao, Z. Indoor ultrasonic positioning system of mobile robot based on TDOA ranging and improved trilateral algorithm. In Proceedings of the 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; pp. 923–927. [Google Scholar]
- Gururaj, K.; Rajendra, A.K.; Song, Y.; Law, C.L.; Cai, G. Real-time identification of NLOS range measurements for enhanced UWB localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Jiang, W.; Li, Y.; Rizos, C. Precise Indoor Positioning and Attitude Determination using Terrestrial Ranging Signals. J. Navig. 2015, 68, 274–290. [Google Scholar] [CrossRef]
- Liu, W.; Fu, X.; Deng, Z. Coordinate-Based Clustering Method for Indoor Fingerprinting Localization in Dense Cluttered Environments. Sensors 2016, 16, 2055. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Wang, B. Residual based weighted least square algorithm for Bluetooth/UWB indoor localization system. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- ABI Research. Bluetooth Smart Evolution Helps the Technology Break into Key IoT Market Verticals. Available online: https://www.abiresearch.com/press/bluetooth-smart-evolution-helps-technology-break-k/ (accessed on 14 November 2016).
- Davidson, P.; Piche, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Kao, C.H.; Hsiao, R.S.; Chen, T.X.; Chen, P.S.; Pan, M.J. A hybrid indoor positioning for asset tracking using Bluetooth low energy and Wi-Fi. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Taipei, Taiwan, 12–14 June 2017. [Google Scholar]
- Kaemarungsi, K.; Krishnamurthy, P. Properties of indoor received signal strength for WLAN location fingerprinting. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, Boston, MA, USA, 26 August 2004. [Google Scholar]
- Lukaski, H.C. Methods for the assessment of human body composition: traditional and new. Am. J. Clin. Nutr. 1987, 46, 537–556. [Google Scholar] [CrossRef] [PubMed]
- Abdul Rahim, K. Heading drift mitigation for low-cost inertial pedestrian navigation. Ph.D. thesis, University of Nottingham, Nottingham, UK, 2012. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Della Rosa, F.; Xu, L.; Nurmi, J.; Christos, L.; Pelosi, M.; Terrezza, A. Hand-grip and body-loss impact on RSS measurements for localization of mass market devices. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011. [Google Scholar]
- Fet, N.; Handte, M.; Marrón, P.J. A model for WLAN signal attenuation of the human body. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 499–508. [Google Scholar]
- Della Rosa, F.; Pelosi, M.; Nurmi, J. Human-Induced Effects on RSS Ranging Measurements for Cooperative Positioning. Int. J. Navig. Obs. 2012. [Google Scholar] [CrossRef]
- Cully, W.P.L.; Cotton, S.L.; Scanlon, W.G.; McQuiston, J.B. Body shadowing mitigation using differentiated LOS/NLOS channel models for RSSI-based Monte Carlo personnel localization. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 1–4 April 2012. [Google Scholar]
- Kashiwagi, I.; Taga, T.; Imai, T. Time-varying path-shadowing model for indoor populated environments. IEEE Trans. Vehi. Technol. 2010, 59, 16–28. [Google Scholar] [CrossRef]
- Kilic, Y.; Ali, A.J.; Meijerink, A.; Bentum, M.J.; Scanlon, W.G. The effect of human-body shadowing on indoor UWB TOA-based ranging systems. In Proceedings of the 9th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012. [Google Scholar]
- Schmitt, S.; Adler, S.; Kyas, M. The effects of human body shadowing in RF-based indoor localization. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, South Korea, 27–30 October 2014. [Google Scholar]
- Cotton, S.L. Human Body Shadowing in Cellular Device-to-Device Communications: Channel Modeling Using the Shadowed κ−μ Fading Model. IEEE J. Sel. Areas Commun. 2015, 33, 111–119. [Google Scholar] [CrossRef]
- ITU-R P1238-6. Propagation Data and Prediction Methods for the Planning of Indoor Radio Communication Systems and Radio Local Area Networks in the Frequency Range 900 MHz to 100 GHz. Available online: https://www.itu.int/rec/R-REC-P.1238-6-200910-S/en (accessed on 20 January 2018).
- Molisch, A.F.; Balakrishnan, K.; Chong, C.C.; Emami, S.; Fort, A.; Karedal, J.; Siwiak, K. IEEE 802.15. 4a channel model-final report. IEEE Tech. Rep. 2004, 15, 0662. [Google Scholar]
- Seco, F.; Jiménez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009. [Google Scholar]
- Hsu, Y.L.; Wang, J.S.; Chang, C.W. A Wearable Inertial Pedestrian Navigation System with Quaternion-Based Extended Kalman Filter for Pedestrian Localization. IEEE Sens. J. 2017, 17, 3193–3206. [Google Scholar] [CrossRef]
- Dinh-Van, N.; Nashashibi, F.; Thanh-Huong, N.; Castelli, E. Indoor Intelligent Vehicle localization using WiFi received signal strength indicator. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| The projection of the k-th anchor point, represents the shadowed Bluetooth beacon | |
| UP | The projection of the unknown point, represents the point being located |
| The coordinates of the k-th AP which is shadowed by a human body | |
| The coordinates of coarse positioning resulting from BLE positioning | |
| The distance between the projections of shadowed AP and UP | |
| The heading information obtained from IMU, indicating the clockwise angle between the North and the body’s orientation, ranging from 0° to 360° | |
| The angle information utilized to detect the shadowing state, ranging from 0° to 180° |
| Shadowing Angle | Parameter | Value |
|---|---|---|
| Side | 6.531 | |
| 0.2093 | ||
| Back | 7.854 | |
| 0.2589 |
| Algorithm | Mean Positioning Error (m) | 90% Positioning Error (m) |
|---|---|---|
| BP-BEC | 0.77 | 1.553 |
| no-BEC | 1.93 | 4.187 |
| Algorithm | Mean Robustness Error (m) | 90% Robustness Error (m) |
|---|---|---|
| BP-BEC | 0.92 | 1.273 |
| no-BEC | 3.49 | 6.42 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Fu, X.; Wang, H. An IMU-Aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning. Sensors 2018, 18, 304. https://doi.org/10.3390/s18010304
Deng Z, Fu X, Wang H. An IMU-Aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning. Sensors. 2018; 18(1):304. https://doi.org/10.3390/s18010304
Chicago/Turabian StyleDeng, Zhongliang, Xiao Fu, and Hanhua Wang. 2018. "An IMU-Aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning" Sensors 18, no. 1: 304. https://doi.org/10.3390/s18010304
APA StyleDeng, Z., Fu, X., & Wang, H. (2018). An IMU-Aided Body-Shadowing Error Compensation Method for Indoor Bluetooth Positioning. Sensors, 18(1), 304. https://doi.org/10.3390/s18010304