Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
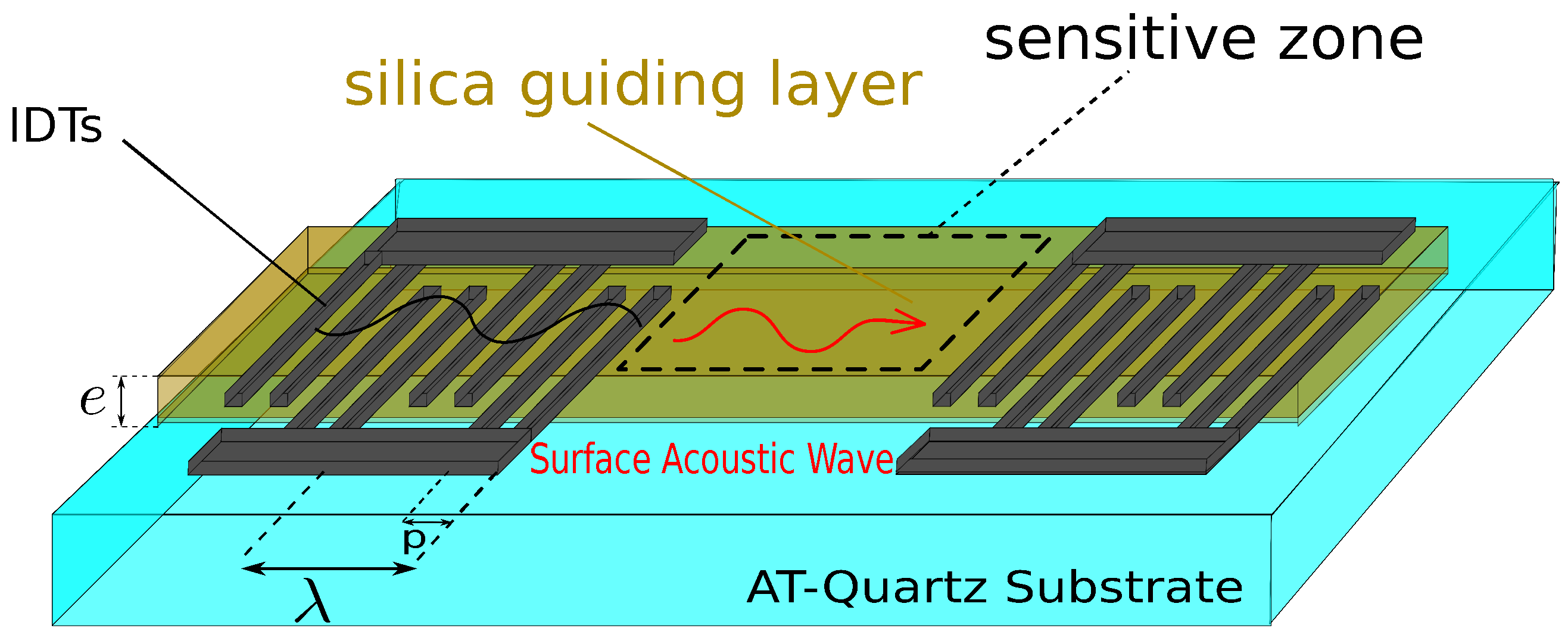
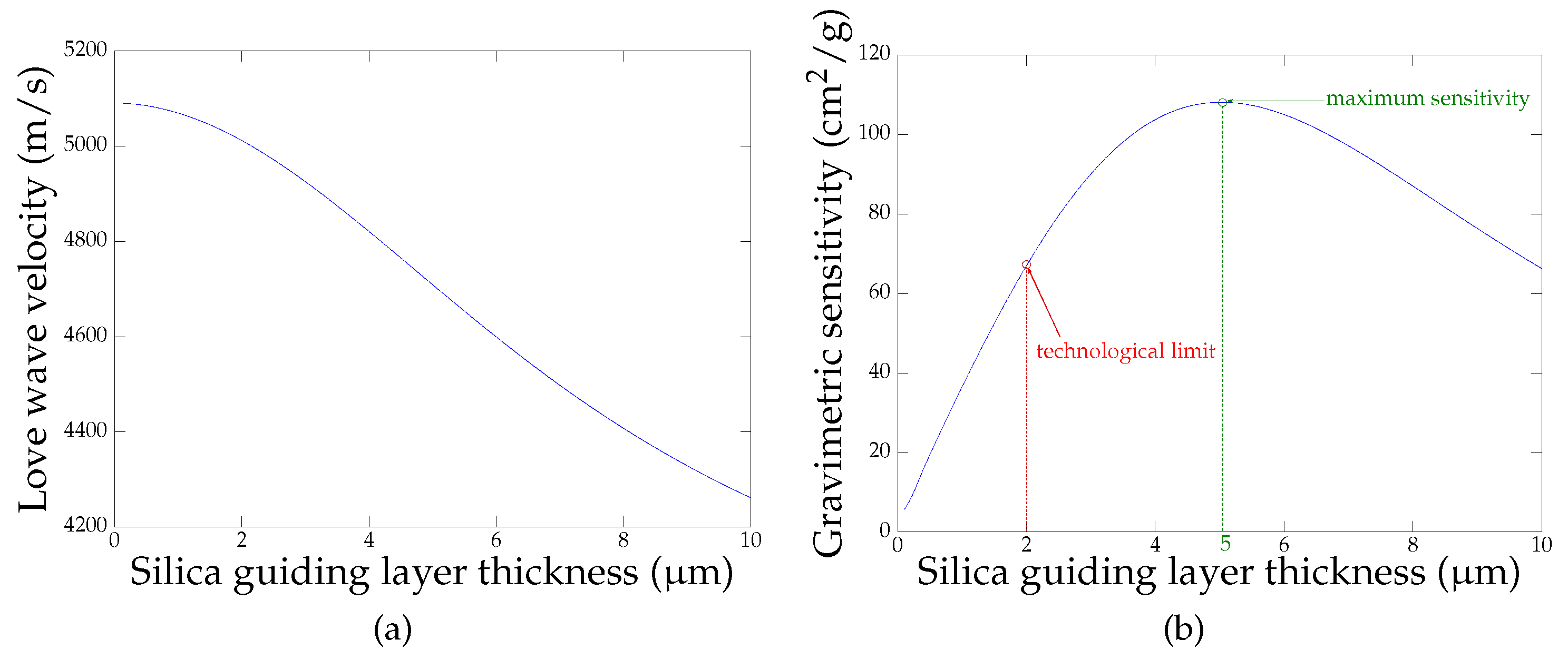
2. SAW Sensor
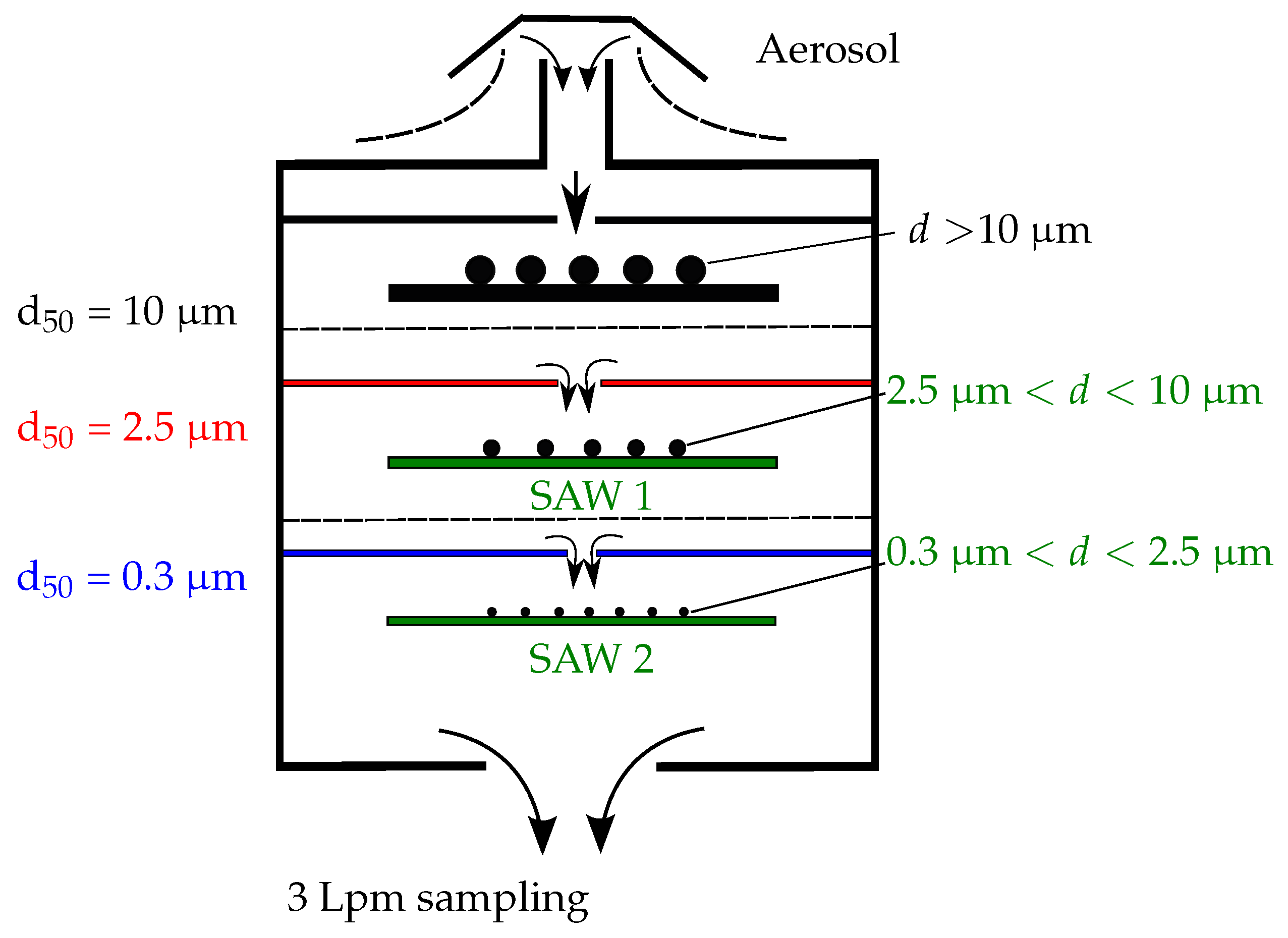
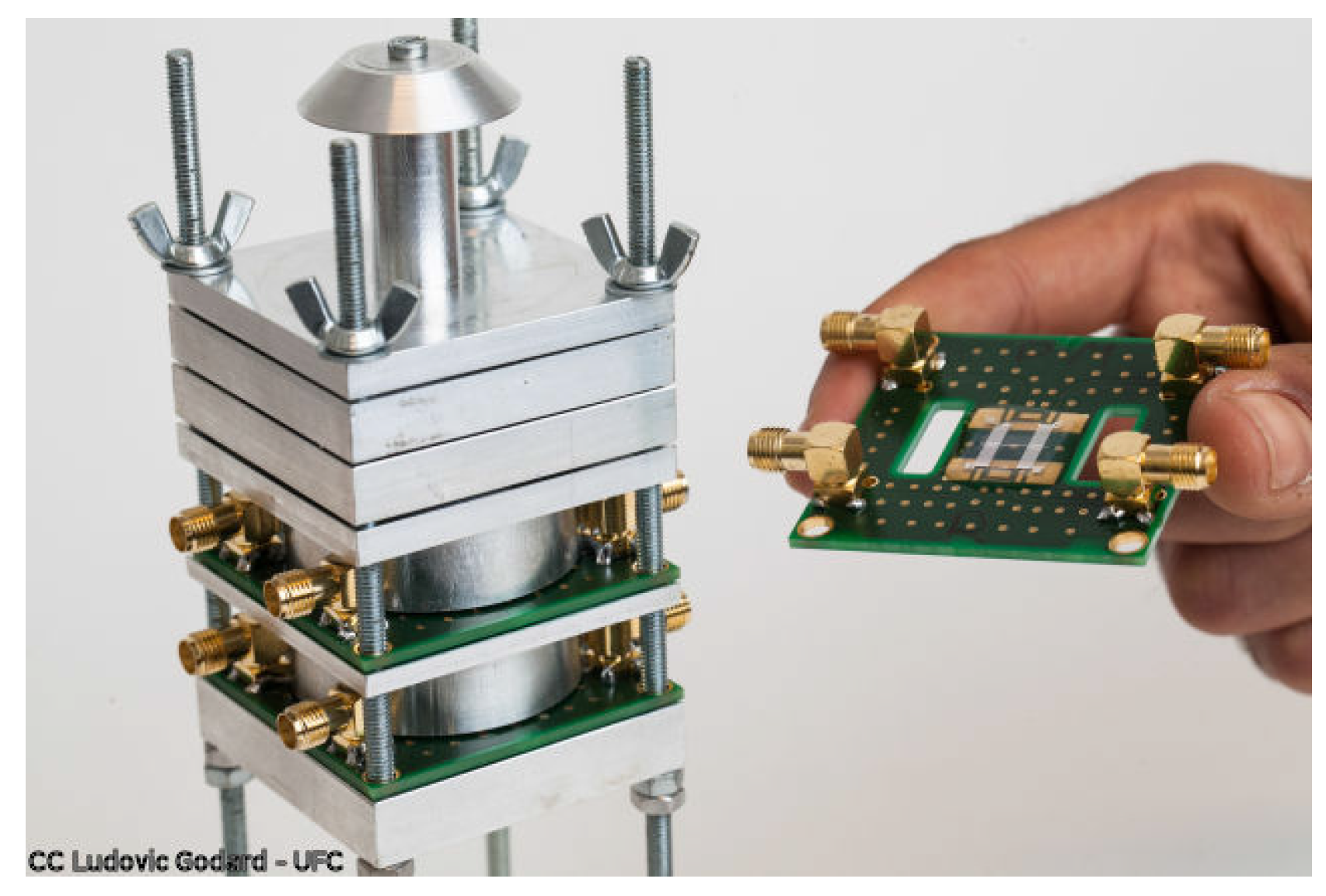
3. Impactor Design
4. Results and Discussion
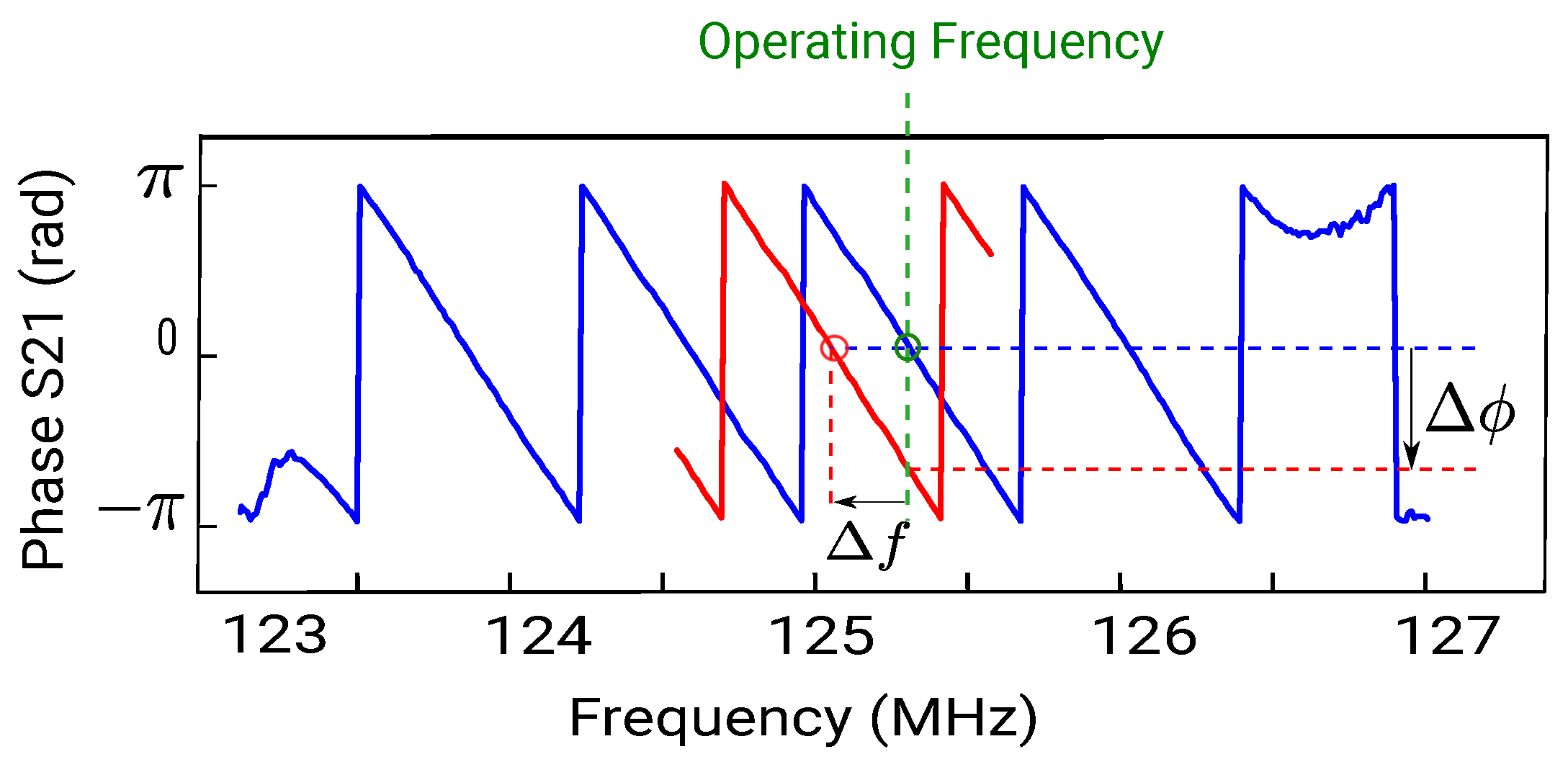
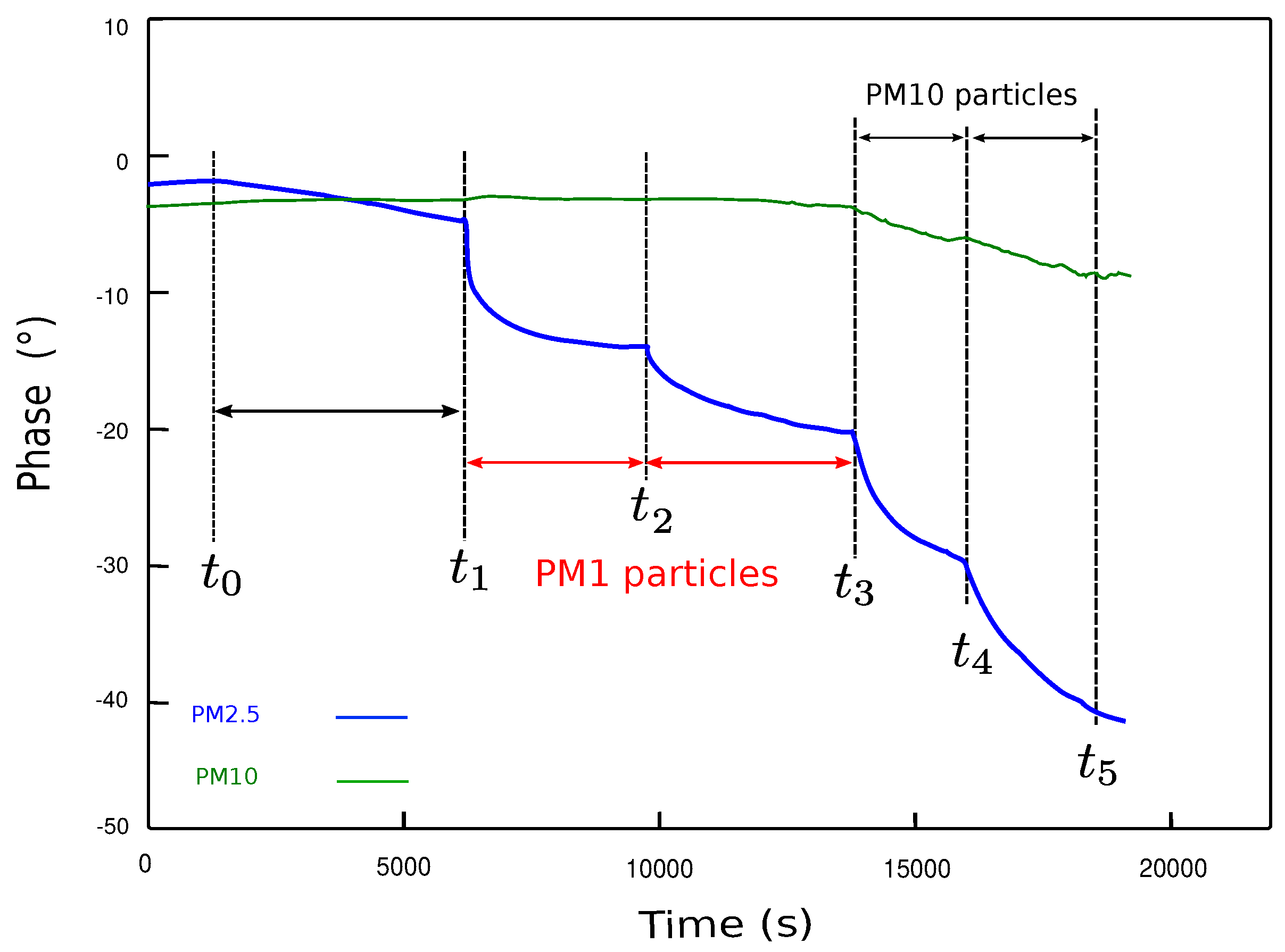
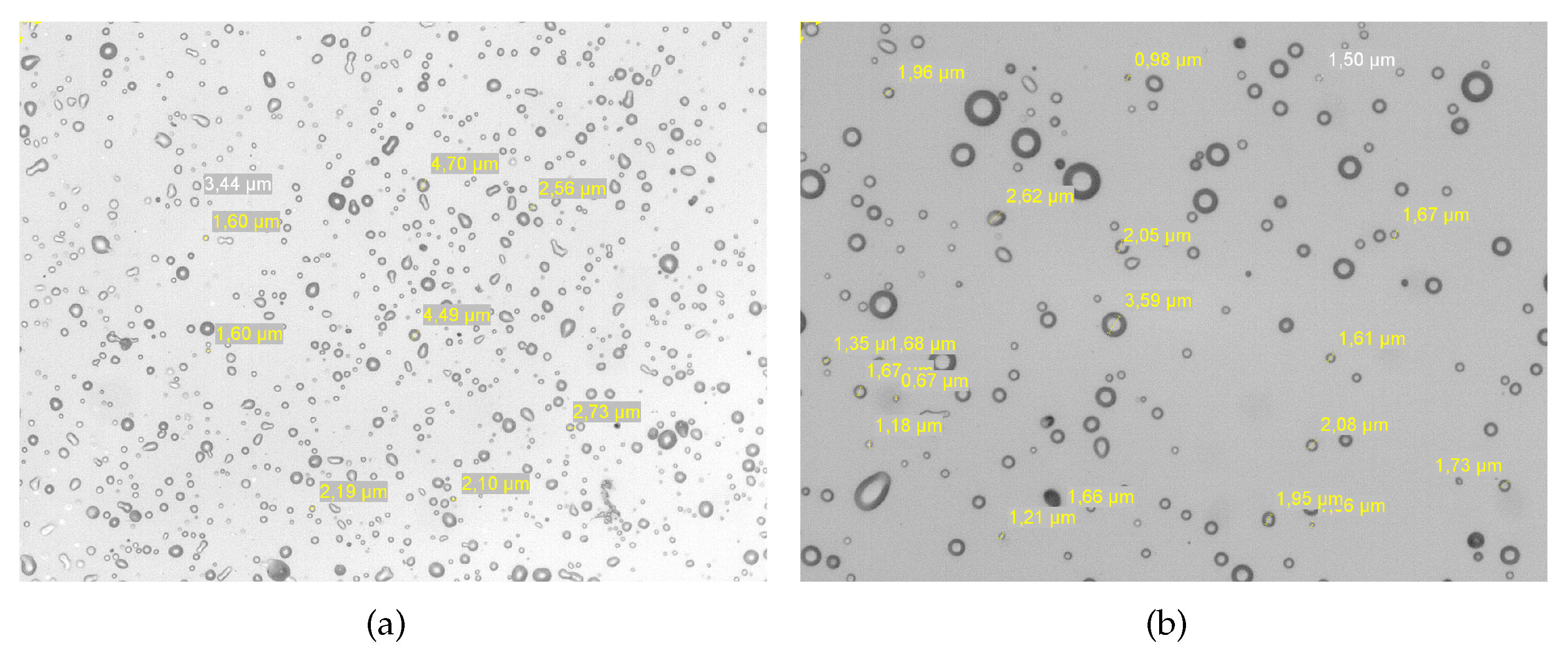
4.1. SAW Phase Response to Particles
4.2. Phase Variation vs. Particle Concentration
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lin, H.; Tao, J.; Du, Y.; Liu, T.; Qian, Z.; Tian, L.; Di, Q.; Rutherford, S.; Guo, L.; Zeng, W.; et al. Particle size and chemical constituents of ambient particulate pollution associated with cardiovascular mortality in Guangzhou, China. Environ. Pollut. 2016, 208, 758–766. [Google Scholar] [CrossRef] [PubMed]
- Rusu-Zagar, G.; Rusu-Zagar, C.; Iorga, I.; Iorga, A. Air Pollution Particles PM10, PM2,5 and the Tropospheric Ozone Effects on Human Health. Procedia Soc. Behav. Sci. 2013, 92, 826–831. [Google Scholar] [CrossRef]
- Chen, R.; Hu, B.; Liu, Y.; Xu, J.; Yang, G.; Xu, D.; Chen, C. Beyond PM2.5: The role of ultrafine particles on adverse health effects of air pollution. Biophys. Acta (BBA) Gen. Subj. 2016, 1860, 2844–2855. [Google Scholar] [CrossRef] [PubMed]
- Schwartz, J.; Dockery, D.W.; Neas, L.M. Is Daily Mortality Associated Specifically with Fine Particles? J. Air Waste Manag. Assoc. 1996, 46, 927–939. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.; Kang, J.S.; Hong, S.C.; Bae, G.N.; Jung, J.H. A new method for the real-time quantification of airborne biological particles using a coupled inertial aerosol system with in situ fluorescence imaging. Sens. Actuators B Chem. 2017, 244, 635–641. [Google Scholar] [CrossRef]
- Marjamäki, M.; Keskinen, J. Technologies for Measuring Particulates; Herring, P., Ed.; Tekes: Helsinki, Finland, 2017. [Google Scholar]
- AirVisual. AirVisual Launches Free Air Pollution Forecasts for More than 5000 Cities Worldwide. Available online: https://www.airvisual.com/pro (accessed on 15 September 2017).
- Ghersi, V.; Rosso, A.; Moukhtar, S.; Léger, K.; Sciare, J.; Bressi, M.; Nicolas, J.; Feron, A.; Bonnaire, N. Origine des particules fines (PM2.5). Pollut. Atmos. 2012, 189, 188–198. [Google Scholar]
- Lenschow, P.; Abraham, H.J.; Kutzner, K.; Lutz, M.; Preuß, J.D.; Reichenbächer, W. Some ideas about the sources of PM10. Atmos. Environ. 2001, 35, S23–S33. [Google Scholar] [CrossRef]
- Tittarelli, A.; Borgini, A.; Bertoldi, M.; De Saeger, E.; Ruprecht, A.; Stefanoni, R.; Tagliabue, G.; Contiero, P.; Crosignani, P. Estimation of particle mass concentration in ambient air using a particle counter. Atmos. Environ. 2008, 42, 8543–8548. [Google Scholar] [CrossRef]
- Soysal, U.; Géhin, E.; Algré, E.; Berthelot, B.; Da, G.; Robine, E. Aerosol mass concentration measurements: Recent advancements of real-time nano/micro systems. J. Aerosol Sci. 2017, 114, 42–54. [Google Scholar] [CrossRef]
- Maldonado-Garcia, M.; Mehdizadeh, E.; Kumar, V.; Wilson, J.; Pourkamali, S. Chip-scale aerosol impactor with integrated resonant mass balances for real time monitoring of airborne particulate concentrations. In Proceedings of the 2015 28th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Estoril, Portugal, 18–22 January 2015; pp. 885–888. [Google Scholar]
- Maldonado-Garcia, M.; Wilson, J.; Pourkamali, S. Horizontal chip-scale cascade impactor with integrated resonant mass balances. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016. [Google Scholar]
- Mehdizadeh, E.; Wilson, J.C.; Hajjam, A.; Rahafrooz, A.; Pourkamali, S. Aerosol impactor with embedded MEMS resonant mass balance for real-time particulate mass concentration monitoring. In Proceedings of the 2013 Transducers Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 661–664. [Google Scholar]
- Wohltjen, H.; Dessy, R. Surface acoustic wave probe for chemical analysis. I. Introduction and instrument description. Anal. Chem. 1979, 51, 1458–1464. [Google Scholar] [CrossRef]
- Bowers, W.D.; Chuan, R.L.; Duong, T.M. A 200 MHz surface acoustic wave resonator mass microbalance. Rev. Sci. Instrum. 1991, 62, 1624–1629. [Google Scholar] [CrossRef]
- Kirschner, J. Surface Acoustic Wave Sensors (SAWS): Design for Application. Available online: http://www.jaredkirschner.com/uploads/9/6/1/0/9610588/saws.pdf (accessed on 15 September 2017).
- Bowers, W.; Chuan, R. Surface acoustic-wave piezoelectric crystal aerosol mass microbalance. Rev. Sci. Instrum. 1989, 60, 1297–1302. [Google Scholar] [CrossRef]
- Hao, W.C.; Liu, J.L.; Liu, M.H.; He, S.T. Development of a new surface acoustic wave based PM 2.5 monitor. In Proceedings of the 2014 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Beijing, China, 30 October–2 November 2014; pp. 52–55. [Google Scholar]
- Thomas, S.; Cole, M.; Villa Lopez, F.H.; Gardner, J. High Frequency Surface Acoustic Wave Resonator-based Sensor for Particulate Matter Detection. Sens. Actuators A Phys. 2016, 244, 138–145. [Google Scholar] [CrossRef]
- Defranould, P.; Wright, P. Filtres à ondes de surface. Techniques de l’ingénieur Electronique 2000, 2, E2200.1–E2200.24. (In French) [Google Scholar]
- Morgan, D. Surface Acoustic Wave Filters: With Applications to Electronic Communications and Signal Processing; Academic Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Royer, D.; Dieulesaint, E. Acoustique—Propagation dans un solide. Techniques de l’ingénieur. Bruit et vibrations. 2001. Available online: http://www.techniques-ingenieur.fr/base-documentaire/environnement-securite-th5/notions-fondamentales-en-acoustique-et-vibrations-42522210/acoustique-af3814/ (accessed on 10 November 2017). (In French).
- Rabus, D.; Friedt, J.; Ballandras, S.; Martin, G.; Carry, E.; Blondeau-Patissier, V. High-sensitivity open-loop electronics for gravimetric acoustic-wave-based sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1219–1226. [Google Scholar] [CrossRef] [PubMed]
- Pastureaud, T.; Laude, V.; Ballandras, S. Stable scattering-matrix method for surface acoustic waves in piezoelectric multilayers. Appl. Phys. Lett. 2002, 80, 2544–2546. [Google Scholar] [CrossRef]
- Reinhardt, A.; Pastureaud, T.; Ballandras, S.; Laude, V. Scattering matrix method for modeling acoustic waves in piezoelectric, fluid, and metallic multilayers. J. Appl. Phys. 2003, 94, 6923–6931. [Google Scholar] [CrossRef]
- Marple, V.A.; Olson, B.A. Sampling and measurement using inertial, gravitational, centrifugal, and thermal techniques. In Aerosol Measurement: Principles, Techniques, and Applications; Wiley Online Library: Hoboken, NJ, USA, 2011; p. 129. [Google Scholar]
- May, K.R. The cascade impactor: an instrument for sampling coarse aerosols. J. Sci. Instrum. 1945, 22, 187. [Google Scholar] [CrossRef]
- Marple, V.A.; Willeke, K. Impactor design. Atmos. Environ. 1976, 10, 891–896. [Google Scholar] [CrossRef]
- Hering, S.V. Impactors, cyclones, and other inertial and gravitational collectors. Air Sampl. Instrum. 1995, 8, 279–321. [Google Scholar]
- Sensor for Measuring the Concentration of Particles in the Atmosphere. WO/2017/174726. Available online: https://patentscope.wipo.int/search/en/detail.jsf?docId=WO2017174726 (accessed on 10 November 2017). (In French).
- Fine, P.M.; Cass, G.R.; Simoneit, B.R. Characterization of fine particle emissions from burning church candles. Environ. Sci. Technol. 1999, 33, 2352–2362. [Google Scholar] [CrossRef]
- Jenkins, N.T.; Pierce, W.M.G.; Eagar, T.W. Particle size distribution of gas metal and flux cored arc welding fumes. Weld. J. 2005, 84, 156–163. [Google Scholar]
- Sauerbrey, G. Verwendung von Schwingquarzen zur Wägung dünner Schichten und zur Mikrowägung. Zeitschrift für Physik A Hadrons Nuclei 1959, 155, 206–222. (In German) [Google Scholar]













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Djoumi, L.; Vanotti, M.; Blondeau-Patissier, V. Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement. Sensors 2018, 18, 255. https://doi.org/10.3390/s18010255
Djoumi L, Vanotti M, Blondeau-Patissier V. Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement. Sensors. 2018; 18(1):255. https://doi.org/10.3390/s18010255
Chicago/Turabian StyleDjoumi, Lyes, Meddy Vanotti, and Virginie Blondeau-Patissier. 2018. "Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement" Sensors 18, no. 1: 255. https://doi.org/10.3390/s18010255
APA StyleDjoumi, L., Vanotti, M., & Blondeau-Patissier, V. (2018). Real Time Cascade Impactor Based On Surface Acoustic Wave Delay Lines for PM10 and PM2.5 Mass Concentration Measurement. Sensors, 18(1), 255. https://doi.org/10.3390/s18010255