Motorcycles that See: Multifocal Stereo Vision Sensor for Advanced Safety Systems in Tilting Vehicles



Abstract
:1. Introduction
2. Stereoscopic Vision Considerations for Motorcycle Safety Applications
2.1. Stereo Vision Fundamentals
2.2. Field of View and Depth of Field
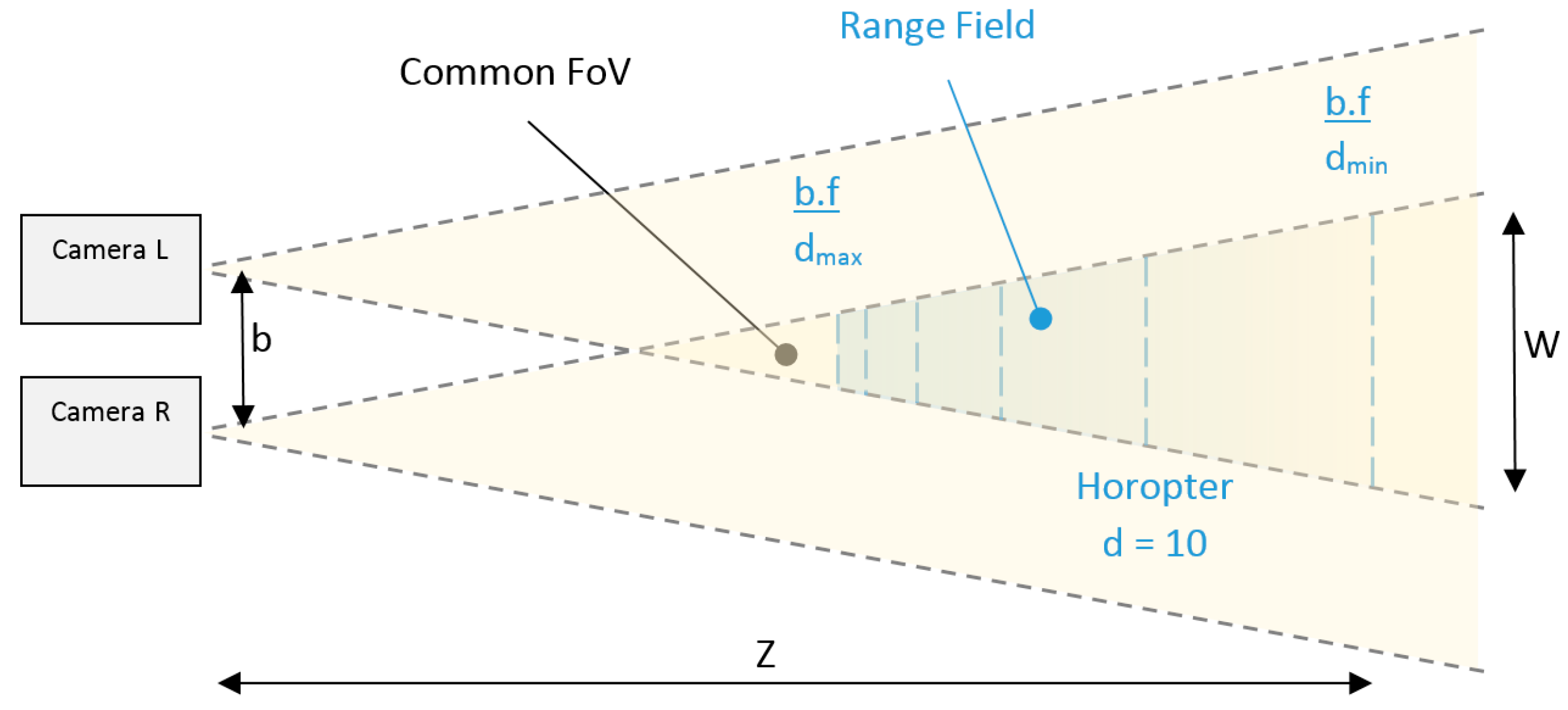
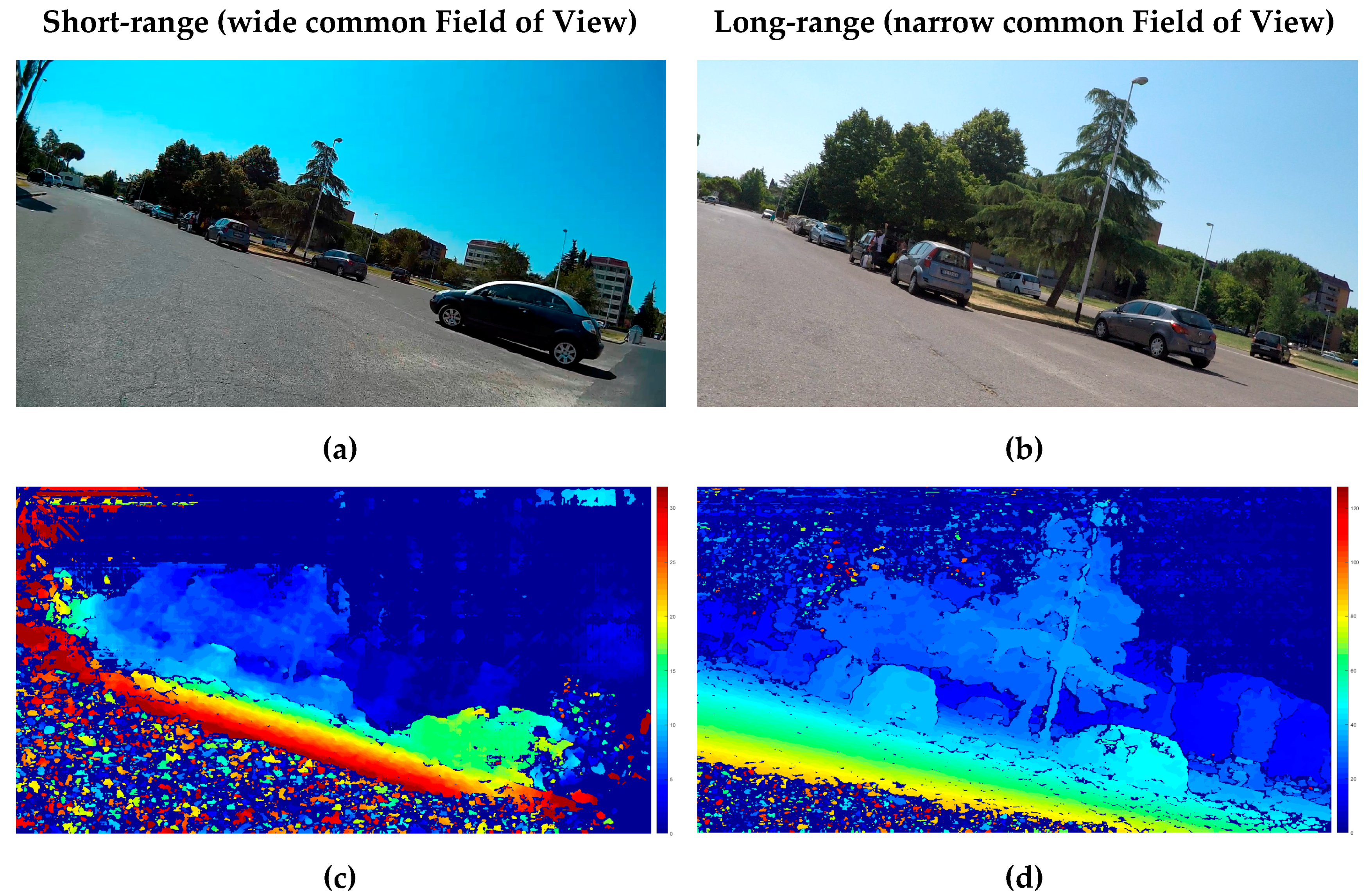
2.3. Caracteristics of a Stereo Camera Rig: Common FoV, Range Field and Horpter d = 10
2.4. Depth Triangulation Error in Stereo Camera Sensors: Case of Long-Range Applications While Moving
2.5. Sub-Pixel Accuracy and Relationship with Depth Accuracy: Case of Car Detection
2.6. Camera Decalibration (calibration loss)
2.7. Stereo Confidence Clues
3. Materials
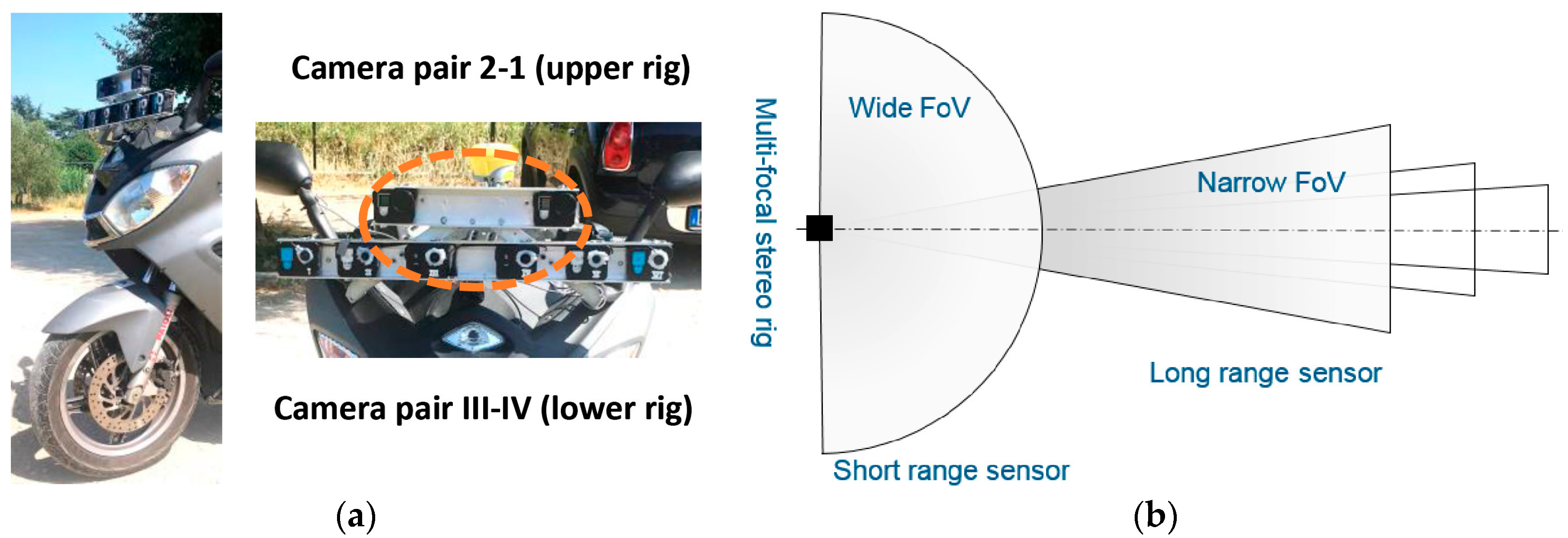
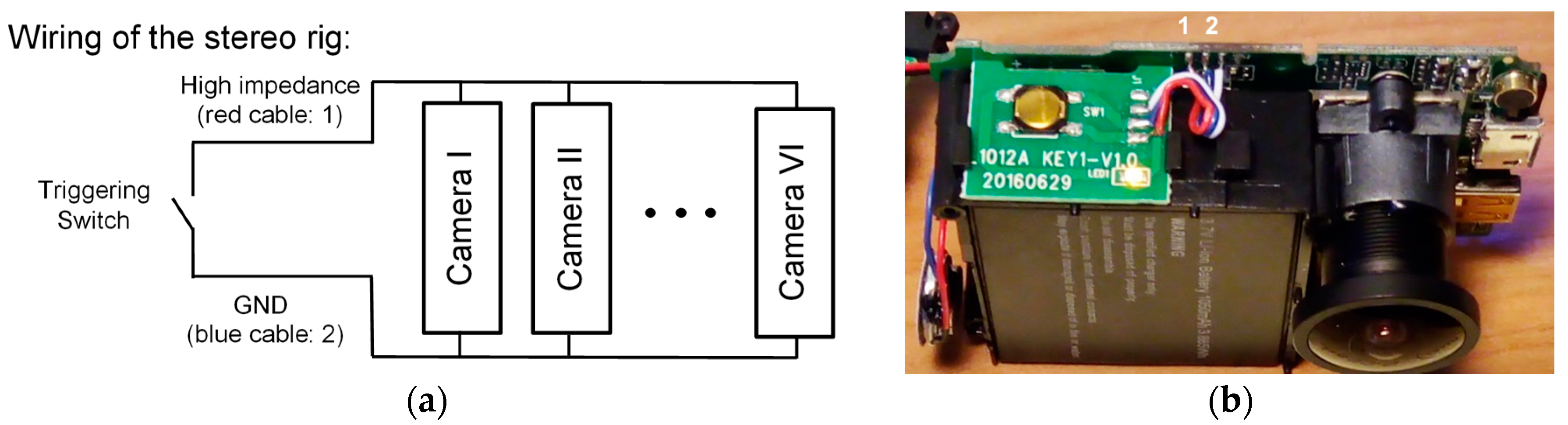
3.1. Sensor Architecture (Multifocal Stereo Rig and Processing)
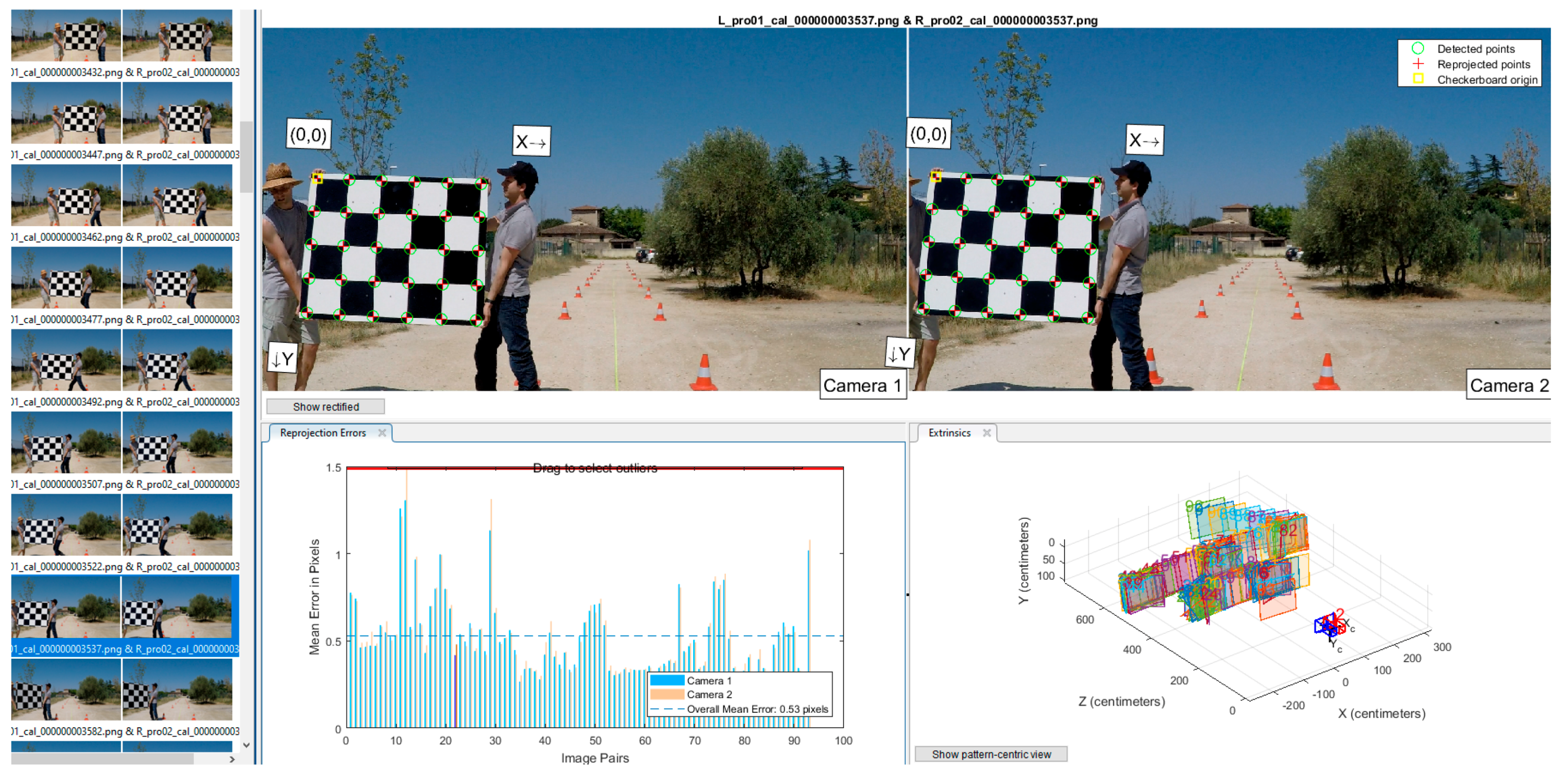
3.2. Calibration of the Multi-Focal Stereo Camera Sensors
3.3. Determination of the Range Field (Verification of Desired Depth Accuracy)
3.4. Determination of the Horizontal Resolution of the Stereo Vision Sensor
3.5. Camera Online Re-Calibration
- Invariance of intrinsic parameters of each camera.
- The extrinsic parameters of each camera pair varies within a small range.
4. Test Protocols
5. Results
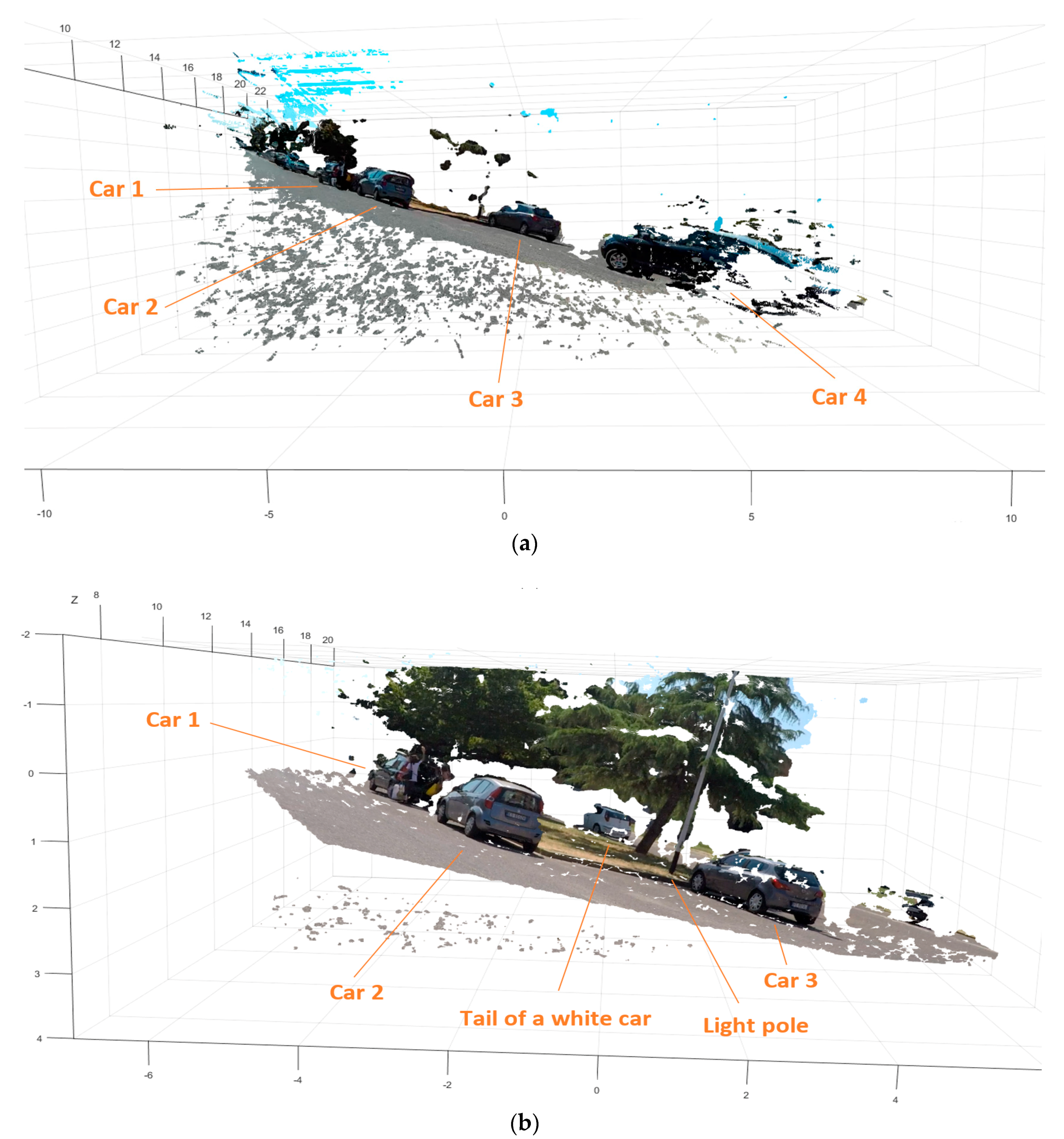
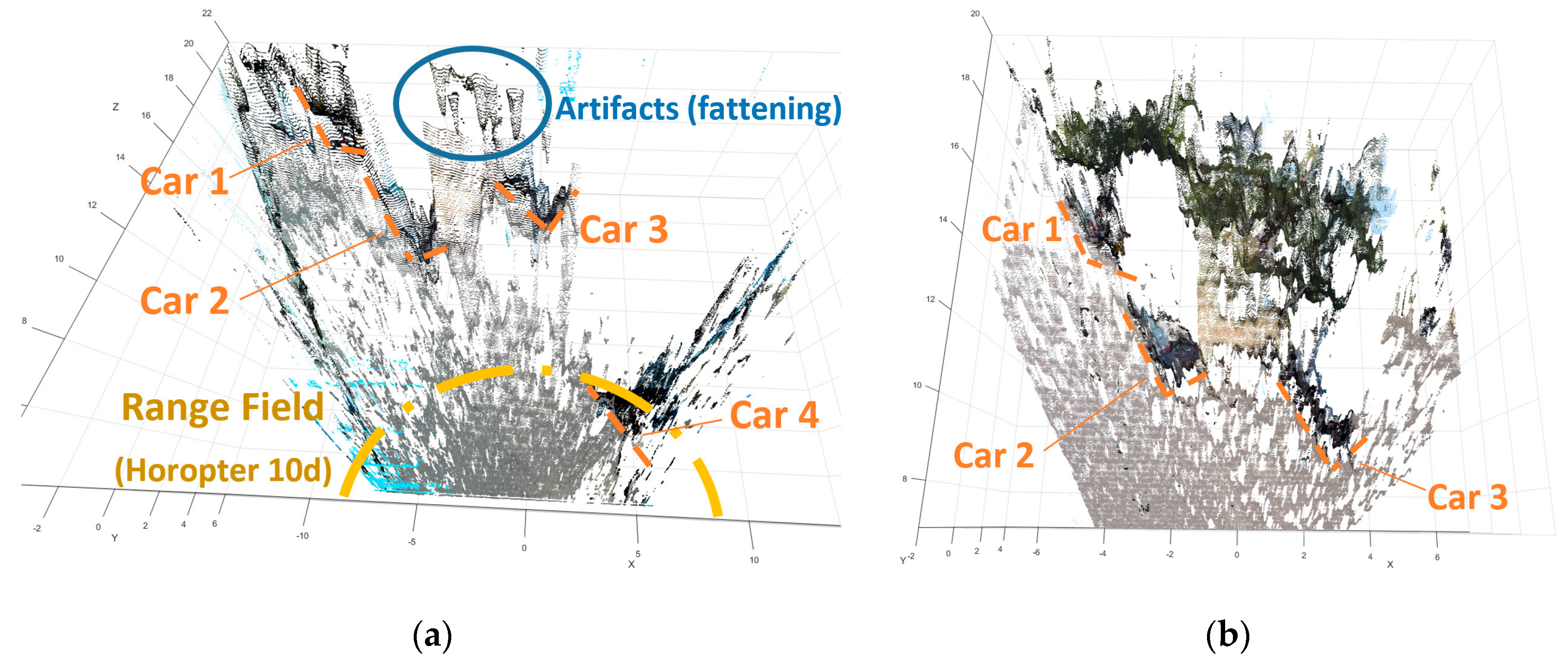
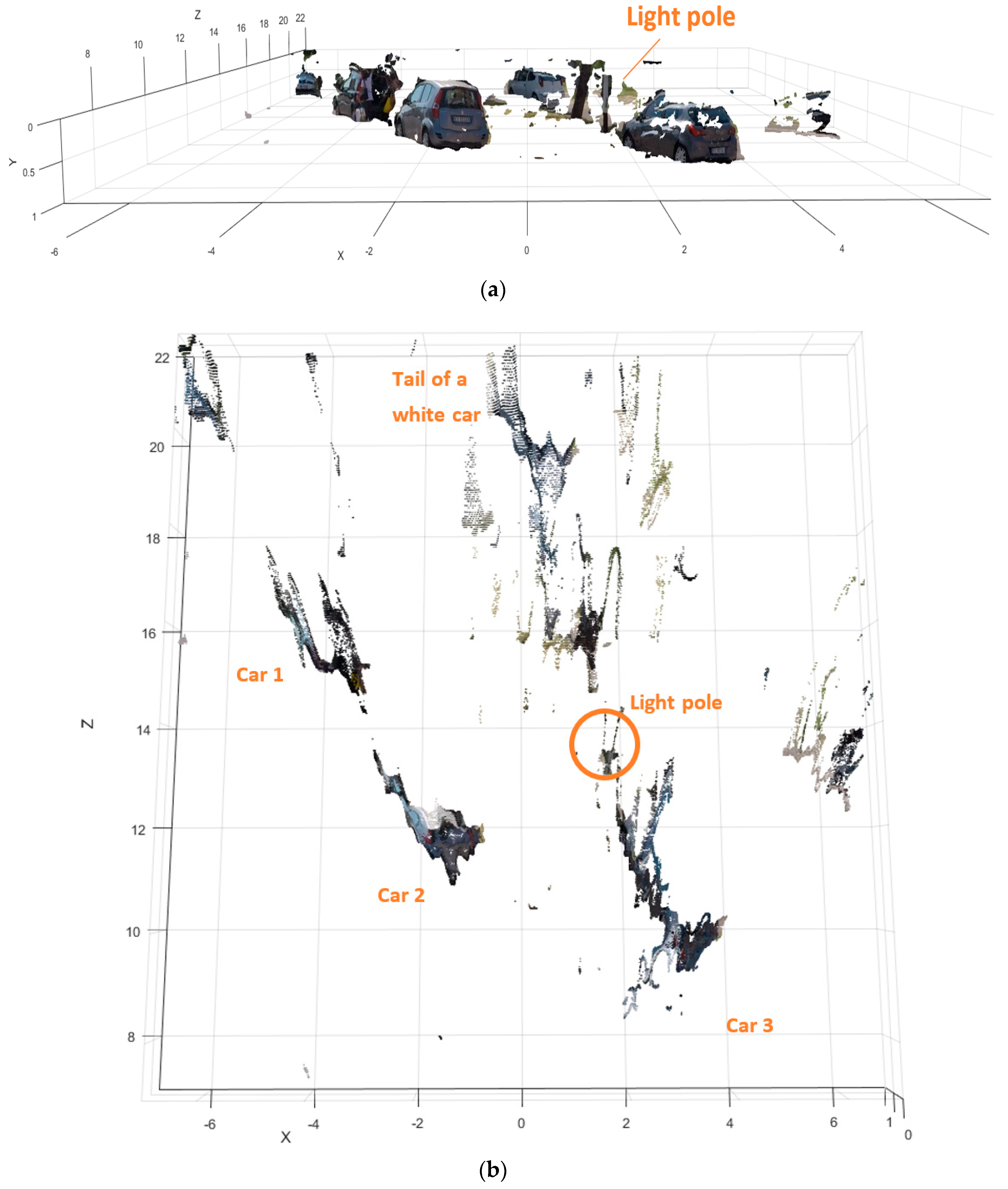
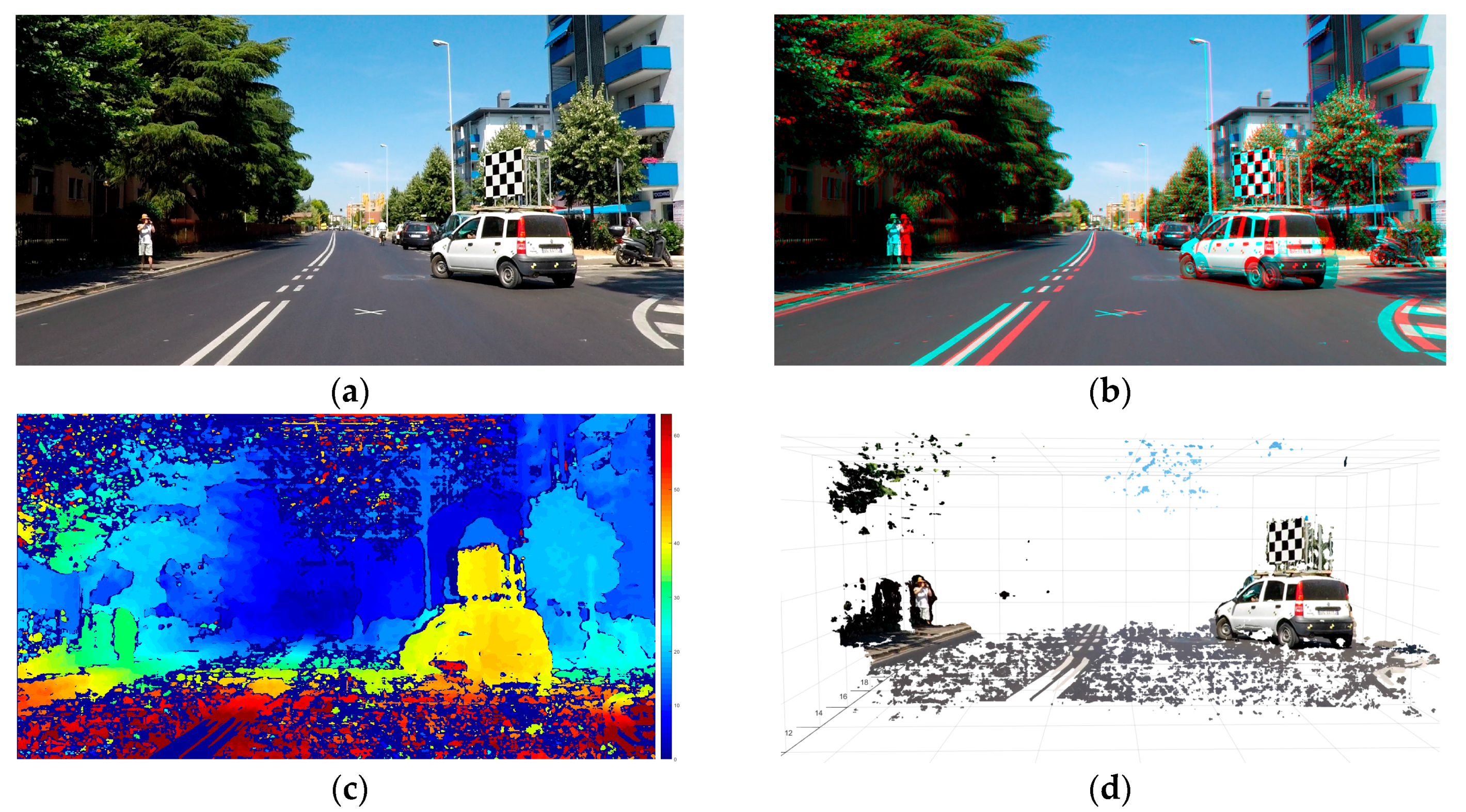
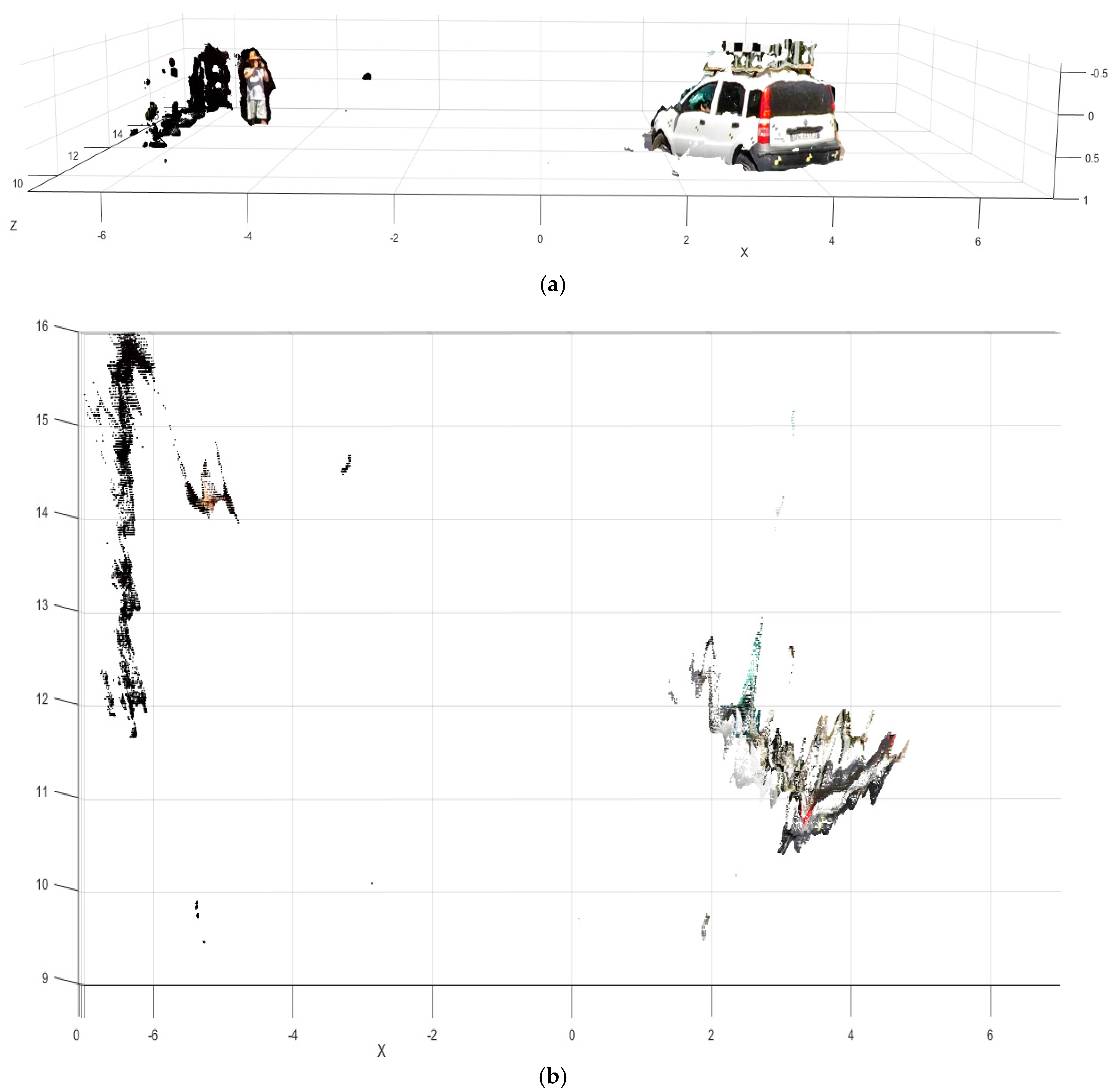
5.1. First Experiment Involving Tilting Dynamics: The Turning Maneuver
- To post process the three-dimensional representation by removing the 13 degrees of inclination of the scene without altering the quality of the 3D reconstruction.
- To extract the points that lies outside of a Region of Interest (RoI).
5.2. Pre-Crash Test (Based in a Real Motorcycle Crash)
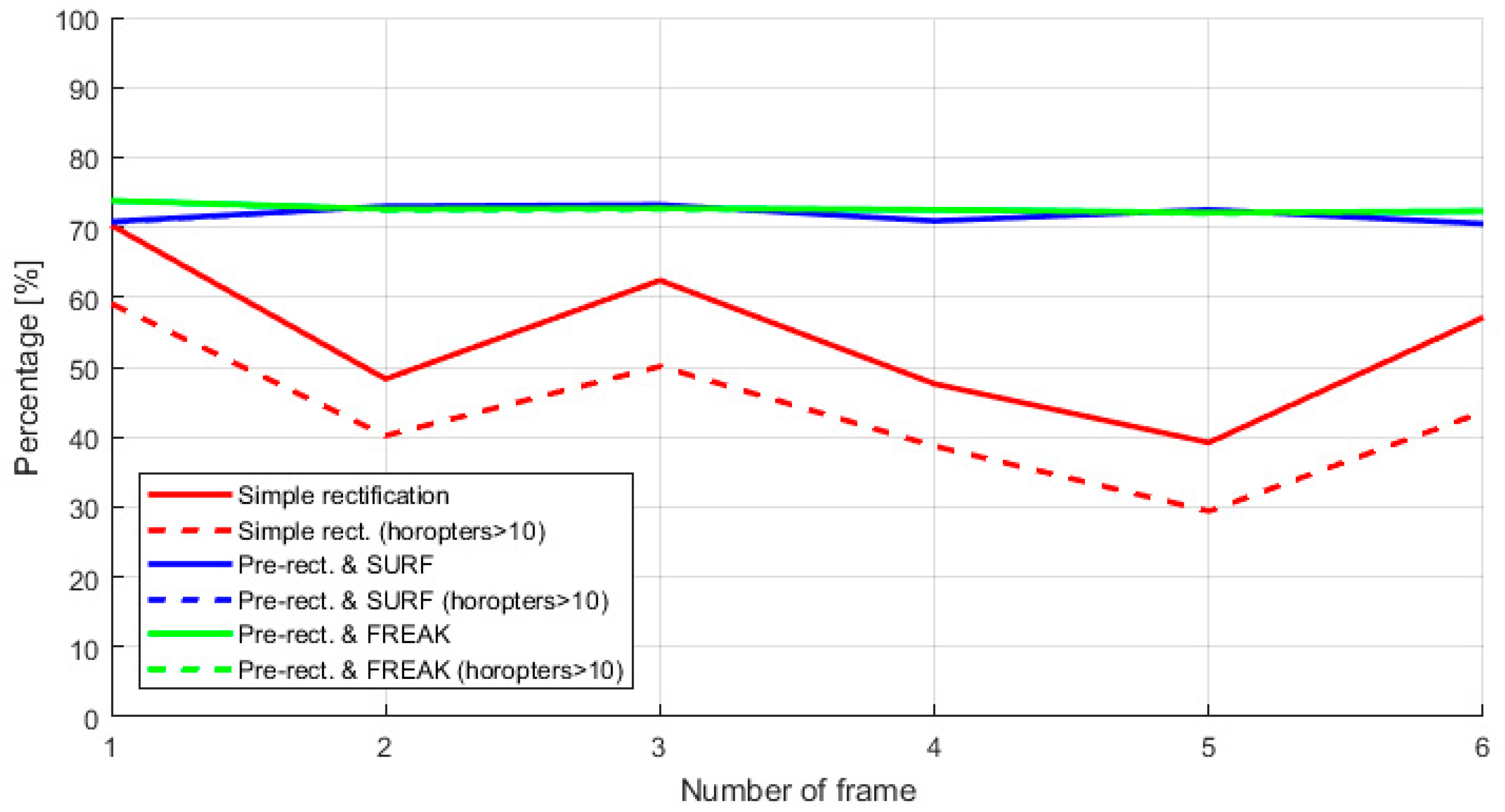
5.3. Quantification of the Integrity of the Disparity Map (during the Pre-Crash Test Sequence)
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Short-Range: Camera Pair III-IV | Long-Range: Camera Pair 2−1 | ||||
|---|---|---|---|---|---|
| Rotation Matrix of Camera IV w.r.t. III (rad) | Rotation Matrix of Camera 2 w.r.t. 1 (rad) | ||||
| 1.0000 | 0.0090 | −2.6874 × 10−4 | 1.0000 | 5.8039 × 10−4 | 0.0056 |
| −0.0090 | 1.0000 | 0.0022 | −5.2068 × 10−4 | 0.9999 | −0.0106 |
| 2.8854 × 10−4 | −0.0022 | 1.0000 | −0.0056 | 0.0106 | 0.9999 |
| Translation Vector of camera IV w.r.t. III (cm) | Translation Vector of camera 2 w.r.t. 1 (cm) | ||||
| −14.9157 | −1.3716 | −1.6951 | −26.4867 | 0.1979 | 0.0216 |
| Fundamental Matrix | Fundamental Matrix | ||||
| 1.6930 × 10−8 | 1.8345 × 10−6 | −0.0024 | 3.3535 × 10−10 | −7.4253 × 10−8 | 1.5366 × 10−4 |
| −1.8583 × 10−6 | 3.6987 × 10−0.7 | 0.1457 | 1.239 × 10−7 | −9.5361 × 10−8 | 0.0154 |
| 0.0010 | −0.1690 | 14.7106 | −1.8817 × 10−4 | −0.0153 | 0.0711 |
| Essential Matrix | Essential Matrix | ||||
| 0.0156 | 1.6920 | −1.3753 | 9.8510 × 10−4 | −0.2187 | 0.1955 |
| −1.7353 | 0.3455 | 149.9148 | 0.3653 | −0.2817 | 26.4836 |
| 0.0237 | −1.49.9216 | 0.3303 | −0.2132 | −26.4851 | −0.2804 |
| Short-Range: Camera Parameters III | Long-Range: Camera Parameters 2 | ||||
|---|---|---|---|---|---|
| Radial distortion Vector | Radial distortion Vector | ||||
| −0.3545 | 0.2133 | −0.2621 | 0.0772 | ||
| Tangential distortion Vector | Tangential distortion Vector | ||||
| 3.3009 × 10−4 | 8.1015 × 10−4 | 0 | 0 | ||
| Focal length Vector (pix) | Focal length Vector (pix) | ||||
| 897.2688 | 897.6886 | 1.7153 × 103 | 1.7196 × 103 | ||
| Principal point Vector (pix) | Principal point Vector (pix) | ||||
| 1.0067 × 103 | 557.7331 | 923.7204 | 535.7389 | ||
| Intrinsic Matrix (pix) | Intrinsic Matrix (pix) | ||||
| 897.2688 | 0 | 0 | 1.7126 × 103 | 0 | 0 |
| 0 | 897.6886 | 0 | 0 | 1.7178 × 103 | 0 |
| 1.0067 × 103 | 557.7331 | 1 | 950.4462 | 512.4862 | 1 |
| Short-Range: Camera Parameters IV | Long-Range: Camera Parameters 1 | ||||
|---|---|---|---|---|---|
| Radial distortion Vector | Radial distortion Vector | ||||
| −0.3446 | 0.1757 | −0.2652 | 0.0875 | ||
| Tangential distortion Vector | Tangential distortion Vector | ||||
| −7.0755 × 10−4 | 7.1722 × 10−4 | 0 | 0 | ||
| Focal length Vector (pix) | Focal length Vector (pix) | ||||
| 1.0275 × 103 | 1.0407 × 103 | 1.7126 × 103 | 1.7178 × 103 | ||
| Principal point Vector (pix) | Principal point Vector (pix) | ||||
| 989.0498 | 556.5230 | 950.4462 | 512.4862 | ||
| Intrinsic Matrix (pix) | Intrinsic Matrix (pix) | ||||
| 1.0275 × 103 | 0 | 0 | 1.7153 × 103 | 0 | 0 |
| 0 | 1.0407 × 103 | 0 | 0 | 1.7196 × 103 | 0 |
| 989.0498 | 556.5230 | 1 | 923.7204 | 535.7389 | 1 |
Appendix B
- 3D reconstructed scenes: (*.pcd) files corresponding to the 3D point clouds acquired for the system which are shown in the publication. Files named “testFirenze*.pcd”.
- Decalibration dataset: (*.png files):
- A set of 30 color stereo pairs (raw data) corresponding to the pre-crash test sequence. Six files named “Original_crash_*.zip”.
- A set of 30 rectified stereo pairs (pre-rectification according to the static camera calibration) corresponding to the pre-crash test sequence. Four files named “PreRect_crash_*.zip”.
The data is available in the following repository:The Wiki page associate to the repository is:
Appendix C


Appendix D
Accurate Narrow Obstacle Detections



References
- Fildes, B.; Keall, M.; Bos, N.; Lie, A.; Page, Y.; Pastor, C.; Pennisi, L.; Rizzi, M.; Thomas, P.; Tingvall, C. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid. Anal. Prev. 2015, 81, 24–29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyriakidis, M.; van de Weijer, C.; van Arem, B.; Happee, R. The deployment of advanced driver assistance systems in Europe. SSRN 2015. [Google Scholar] [CrossRef]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef] [PubMed]
- Isaksson-Hellman, I.; Lindman, M. Evaluation of rear-end collision avoidance technologies based on real world crash data. In Proceedings of the Future Active Safety Technology Towards zero traffic accidents (FASTzero), Gothenburg, Sweden, 9–11 September 2015; pp. 471–476. [Google Scholar]
- Isaksson-Hellman, I.; Lindman, M. Evaluation of the crash mitigation effect of low-speed automated emergency braking systems based on insurance claims data. Traffic Inj. Prev. 2016, 17, 42–47. [Google Scholar] [CrossRef] [PubMed]
- Savino, G.; Rizzi, M.; Brown, J.; Piantini, S.; Meredith, L.; Albanese, B.; Pierini, M.; Fitzharris, M. Further Development of Motorcycle Autonomous Emergency Braking (MAEB), What Can In-Depth Studies Tell Us? A Multinational Study. Traffic Inj. Prev. 2014, 15, S165–S172. [Google Scholar] [CrossRef] [PubMed]
- Rogers, N. Trends in motorcycles fleet worldwide. In Paper Presented at: Joint OECD/ITF Transport Research Committee Workshop on Motorcycling Safety; OECD: Paris, France, 2008. [Google Scholar]
- Sekine, T. Utilization of probe powered two-wheeler vehicles to realize a safe mobile society. IATSS Res. 2014, 38, 58–70. [Google Scholar] [CrossRef]
- Gil, G.; Savino, G.; Piantini, S.; Baldanzini, N.; Happee, R.; Pierini, M. Are automatic systems the future of motorcycle safety? A novel methodology to prioritize potential safety solutions based on their projected effectiveness. Traffic Inj. Prev. 2017, 18. [Google Scholar] [CrossRef]
- Will, F.; Davdison, J.N.; Couchman, P.; Bednall, D. Tomorrow’s Car-for Today’s People: Can Tilting Three Wheeled Vehicles be a Solution for the Problems of Today and the Future? SAE Technical Paper: Warrendale, PA, USA, 2011. [Google Scholar]
- Festini, A.; Tonoli, A.; Zenerino, E. Urban and extra urban vehicles: Re-thinking the vehicle design. In New Trends and Developments in Automotive System Engineering; InTech: London, UK, 2011. [Google Scholar]
- Haworth, N. Powered two wheelers in a changing world—Challenges and opportunities. Accid. Anal. Prev. 2012, 44, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Santucci, M.; Pieve, M.; Pierini, M. Electric L-category Vehicles for Smart Urban Mobility. Transp. Res. Procedia 2016, 14, 3651–3660. [Google Scholar] [CrossRef]
- Simha, P. Disruptive Innovation on Two Wheels: Chinese Urban Transportation and Electrification of the Humble Bike. Period. Polytech. Transp. Eng. 2016, 44, 222–227. [Google Scholar] [CrossRef]
- Dekoster, J.; Schollaert, U. Cycling: The Way Ahead for Towns and Cities; Office for Official Publications of the European Commission: Luxembourg, 1999; ISBN 978-92-828-5724-3. [Google Scholar]
- Cossalter, V.; Doria, A. Potentialities of a Three-Wheeled Vehicle for Zero Emission Mobility. In Proceedings of the EVER Monaco Conference, Monte-Carlo, Monaco, 26–29 March 2009. [Google Scholar]
- Parker, A.A. In Europe 250 watt pedelecs reduce pollution and improve the safety and mobility of young and elderly riders. In Proceedings of the 2011 Australasian Transport Research Forum, Adelaide, Australia, 28–30 September 2011; pp. 28–30. [Google Scholar]
- Dziadek, P.-E.; Feucht, W.; Mittnacht, A.; Kula, H.-G.; Frank, H. Eco-friendly application of EVs for home-to-work and home-to-education transports. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 705–709. [Google Scholar]
- Ruan, Y.; Hang, C.C.; Wang, Y.M. Government’s role in disruptive innovation and industry emergence: The case of the electric bike in China. Technovation 2014, 34, 785–796. [Google Scholar] [CrossRef]
- Berzi, L.; Delogu, M.; Pierini, M.; Romoli, F. Evaluation of the end-of-life performance of a hybrid scooter with the application of recyclability and recoverability assessment methods. Resour. Conserv. Recycl. 2016, 108, 140–155. [Google Scholar] [CrossRef]
- Nicol, D.; Heuer, W.; Chrysler, S. Infrastructure Countermeasures to Mitigate Motorcyclist Crashes in Europe; International Technology Scanning Program: Washington, DC, USA, 2012.
- NHTSA. Traffic Safety Facts; National Highway Traffic Safety Administration: Washington, DC, USA, 2015.
- The EU. Traffic Safety Basic Facts on Main Figures, June 2016; European Commission, Directorate General for Transport: Brussels, Belgium, 2016. [Google Scholar]
- Gil, G.; Savino, G.; Piantini, S.; Pierini, M. Is stereo vision a suitable remote sensing approach for motorcycle safety? An analysis of LIDAR, RADAR, and machine vision technologies subjected to the dynamics of a tilting vehicle. In Proceedings of the 7th Transport Research Arena TRA, Vienna, Austria, 12 December 2017. [Google Scholar]
- Giovannini, F.; Savino, G.; Pierini, M.; Baldanzini, N. Analysis of the minimum swerving distance for the development of a motorcycle autonomous braking system. Accid. Anal. Prev. 2013, 59, 170–184. [Google Scholar] [CrossRef] [PubMed]
- Dozza, M.; Schindler, R.; Bianchi-Piccinini, G.; Karlsson, J. How do drivers overtake cyclists? Accid. Anal. Prev. 2016, 88, 29–36. [Google Scholar] [CrossRef] [PubMed]
- Franke, U.; Kutzbach, I. Fast stereo based object detection for stop&go traffic. In Proceedings of the Conference on Intelligent Vehicles, Tokyo, Japan, 19–20 September 1996; IEEE: New York, NY, USA, 1996; pp. 339–344. [Google Scholar]
- Zhang, Z.; Weiss, R.; Hanson, A.R. Obstacle detection based on qualitative and quantitative 3D reconstruction. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 15–26. [Google Scholar] [CrossRef]
- Nedevschi, S.; Danescu, R.; Frentiu, D.; Marita, T.; Oniga, F.; Pocol, C.; Graf, T.; Schmidt, R. High accuracy stereovision approach for obstacle detection on non-planar roads. Proc IEEE INES 2004, 211–216. [Google Scholar]
- Hu, Z.; Uchimura, K. UV-disparity: An efficient algorithm for stereovision based scene analysis. In Proceedings of the 2005 IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 48–54. [Google Scholar]
- Broggi, A.; Caraffi, C.; Fedriga, R. I.; Grisleri, P. Obstacle detection with stereo vision for off-road vehicle navigation. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)—Workshops, San Diego, CA, USA, 21–23 September 2005; p. 65. [Google Scholar]
- Broggi, A.; Caraffi, C.; Porta, P.P.; Zani, P. The single frame stereo vision system for reliable obstacle detection used during the 2005 DARPA grand challenge on TerraMax. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 745–752. [Google Scholar]
- Franke, U.; Rabe, C.; Badino, H.; Gehrig, S. 6d-vision: Fusion of stereo and motion for robust environment perception. In DAGM-Symposium; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3663, pp. 216–223. [Google Scholar]
- Badino, H.; Franke, U.; Mester, R. Free space computation using stochastic occupancy grids and dynamic programming. In Workshop on Dynamical Vision; ICCV: Rio de Janeiro, Brazil, 2007; Volume 20. [Google Scholar]
- Suganuma, N.; Fujiwara, N. An obstacle extraction method using virtual disparity image. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 456–461. [Google Scholar]
- Suganuma, N.; Shimoyama, M.; Fujiwara, N. Obstacle detection using virtual disparity image for non-flat road. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 596–601. [Google Scholar]
- Barth, A.; Franke, U. Where will the oncoming vehicle be the next second? In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1068–1073. [Google Scholar]
- Badino, H.; Franke, U.; Pfeiffer, D. The Stixel World-A Compact Medium Level Representation of the 3D-World. In DAGM-Symposium; Springer: Berlin/Heidelberg, Germany, 2009; pp. 51–60. [Google Scholar]
- Oniga, F.; Nedevschi, S. Processing Dense Stereo Data Using Elevation Maps: Road Surface, Traffic Isle, and Obstacle Detection. IEEE Trans. Veh. Technol. 2010, 59, 1172–1182. [Google Scholar] [CrossRef]
- Wedel, A.; Franke, U. Monocular video serves radar-based emergency braking. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 93–98. [Google Scholar]
- Xia, L.; Chung, T.D.; Kassim, K.A.A. An Automobile Detection Algorithm Development for Automated Emergency Braking System. In Proceedings of the Design Automation Conference (DAC), 51st ACM/EDAC/IEEE, San Francisco, CA, USA, 1–5 June 2014; ACM Press: New York, NY, USA, 2014; pp. 1–6. [Google Scholar]
- Bernini, N.; Bertozzi, M.; Castangia, L.; Patander, M.; Sabbatelli, M. Real-time obstacle detection using stereo vision for autonomous ground vehicles: A survey. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 873–878. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-0-511-18618-9. [Google Scholar]
- Bradski, G.R.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library, 1st ed.; Software that sees; [Nachdr.]; O’Reilly: Beijing, China, 2011; ISBN 978-0-596-51613-0. [Google Scholar]
- Qian, N. Binocular disparity and the perception of depth. Neuron 1997, 18, 359–368. [Google Scholar] [CrossRef]
- Luong, Q.-T.; Faugeras, O.D. The Fundamental matrix: Theory, algorithms, and stability analysis. Int. J. Comput. Vis. 1996, 17, 43–75. [Google Scholar] [CrossRef]
- Hartley, R.I. In defense of the eight-point algorithm. IEEE Trans. Pattern Anal. Mach. Intell. 1997, 19, 580–593. [Google Scholar] [CrossRef]
- Baker, H.H.; Bolles, R.C. Generalizing epipolar-plane image analysis on the spatiotemporal surface. Int. J. Comput. Vis. 1989, 3, 33–49. [Google Scholar] [CrossRef]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on, San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 807–814. [Google Scholar]
- Olson, C.F.; Matthies, L.H.; Schoppers, M.; Maimone, M.W. Stereo Ego-motion Improvements for Robust Rover Navigation. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Langer, D.; Rosenblatt, J.K.; Hebert, M. A behavior-based system for off-road navigation. IEEE Trans. Robot. Autom. 1994, 10, 776–783. [Google Scholar] [CrossRef]
- Matthies, L.; Shafer, S. Error modeling in stereo navigation. IEEE J. Robot. Autom. 1987, 3, 239–248. [Google Scholar] [CrossRef]
- Jung, I.-K.; Lacroix, S. Simultaneous localization and mapping with stereovision. Robot. Res. 2005, 315–324. [Google Scholar] [CrossRef]
- Daniilidis, K.; Spetsakis, M.E. Understanding noise sensitivity in structure from motion. In Chapter 4, Visual Navigation; Aloimonos, Y., Ed.; Lawrence Erlbaum Associates: Hillsdale, NJ, USA, 1996; pp. 61–88. [Google Scholar]
- Chowdhury, A.R.; Chellappa, R. Statistical error propagation in 3d modeling from monocular video. In Proceedings of the 2003 Conference on Computer Vision and Pattern Recognition Workshop, Madison, WI, USA, 16–22 June 2003; Volume 8, p. 89. [Google Scholar]
- Young, G.S.; Chellappa, R. Statistical analysis of inherent ambiguities in recovering 3-d motion from a noisy flow field. In IEEE Transactions Pattern Analysis and Machine Intelligence; IEEE: New York, NY, USA, 1992; Volume 14, pp. 995–1013. [Google Scholar]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 1255–1262. [Google Scholar] [CrossRef]
- Sibley, G.; Matthies, L.; Sukhatme, G. Bias reduction and filter convergence for long range stereo. Robot. Res. 2007, 285–294. [Google Scholar] [CrossRef]
- Freundlich, C.; Zavlanos, M.; Mordohai, P. Exact bias correction and covariance estimation for stereo vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3296–3304. [Google Scholar]
- Keren, D.; Peleg, S.; Brada, R. Image sequence enhancement using sub-pixel displacements. In Proceedings of the Computer Vision and Pattern Recognition, Ann Arbor, MI, USA, 5–9 June 1988; pp. 742–746. [Google Scholar]
- Di Stefano, L.; Mattoccia, S. Real-Time Stereo within the VIDET Project. Real-Time Imaging 2002, 8, 439–453. [Google Scholar] [CrossRef]
- Williamson, T.A. A High-Performance Stereo Vision System for Obstacle Detection; Carnegie Mellon University: Pittsburgh, PA, USA, 1998. [Google Scholar]
- Shimizu, M.; Okutomi, M. Precise subpixel estimation on area-based matching. Syst. Comput. Jpn. 2002, 33, 1–10. [Google Scholar] [CrossRef]
- Szeliski, R.; Scharstein, D. Sampling the disparity space image. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 419–425. [Google Scholar] [CrossRef] [PubMed]
- Nedevschi, S.; Schmidt, R.; Danescu, R.; Frentiu, D.; Marita, T.; Graf, T.; Oniga, F.; Pocol, C. High accuracy stereo vision system for far distance obstacle detection. In Proceedings of the Intelligent Vehicles Symposium, 2004 IEEE, Parma, Italy, 14–17 June 2004; pp. 292–297. [Google Scholar]
- Gehrig, S.K.; Franke, U. Improving stereo sub-pixel accuracy for long range stereo. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 Octomber 2007; pp. 1–7. [Google Scholar]
- Haller, I.; Nedevschi, S. Design of Interpolation Functions for Subpixel-Accuracy Stereo-Vision Systems. IEEE Trans. Image Process. 2012, 21, 889–898. [Google Scholar] [CrossRef] [PubMed]
- Zabih, R.; Woodfill, J. Non-parametric local transforms for computing visual correspondence. In European Conference on Computer Vision; Springer: New York, NY, USA, 1994; pp. 151–158. [Google Scholar]
- Hirschmuller, H.; Scharstein, D. Evaluation of Stereo Matching Costs on Images with Radiometric Differences. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 1582–1599. [Google Scholar] [CrossRef] [PubMed]
- Spangenberg, R.; Langner, T.; Rojas, R. Weighted Semi-Global Matching and Center-Symmetric Census Transform for Robust Driver Assistance. In Computer Analysis of Images and Patterns: 15th International Conference, CAIP 2013, York, UK, August 27-29, 2013, Proceedings, Part II; Wilson, R., Hancock, E., Bors, A., Smith, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 34–41. ISBN 978-3-642-40246-3. [Google Scholar]
- Lee, J.; Jun, D.; Eem, C.; Hong, H. Improved census transform for noise robust stereo matching. Opt. Eng. 2016, 55, 063107. [Google Scholar] [CrossRef]
- Hirschmuller, H.; Gehrig, S. Stereo matching in the presence of sub-pixel calibration errors. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 437–444. [Google Scholar]
- Poggi, M.; Tosi, F.; Mattoccia, S. Quantitative evaluation of confidence measures in a machine learning world. In International Conference on Computer Vision (ICCV 2017); IEEE: New York, NY, USA, 2017. [Google Scholar]
- Hansen, P.; Alismail, H.; Rander, P.; Browning, B. Online continuous stereo extrinsic parameter estimation. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1059–1066. [Google Scholar]
- Kelly, J.; Matthies, L.H.; Sukhatme, G.S. Simultaneous mapping and stereo extrinsic parameter calibration using GPS measurements. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 279–286. [Google Scholar]
- Lanier, P.; Short, N.; Kochersberger, K.; Abbott, L. Modal-based Camera Correction for Large Pitch Stereo Imaging. In Structural Dynamics, Volume 3; Springer: New York, NY, USA, 2011; pp. 1225–1238. [Google Scholar]
- Roques, S.; Jahan, L.; Rougé, B.; Thiebaut, C. Satellite attitude instability effects on stereo images. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 7–21 May 2004; pp. 477–480. [Google Scholar]
- Warren, M.; McKinnon, D.; Upcroft, B. Online calibration of stereo rigs for long-term autonomy. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3692–3698. [Google Scholar]
- Rehder, E.; Kinzig, C.; Bender, P.; Lauer, M. Online stereo camera calibration from scratch. In Proceedings of the Intelligent Vehicles Symposium (IV), 2017 IEEE, Los Angeles, CA, USA, 11–14 June 2017; pp. 1694–1699. [Google Scholar]
- Ling, Y.; Shen, S. High-precision online markerless stereo extrinsic calibration. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 Octomber 2016; pp. 1771–1778. [Google Scholar]
- Unger, C.; Wahl, E.; Ilic, S. Efficient stereo matching for moving cameras and decalibrated rigs. In Proceedings of the Intelligent Vehicles Symposium (IV), 2011 IEEE, Baden-Baden, Germany, 5–9 June 2011; pp. 417–422. [Google Scholar]
- Scharstein, D.; Szeliski, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Banks, J.; Corke, P. Quantitative evaluation of matching methods and validity measures for stereo vision. Int. J. Robot. Res. 2001, 20, 512–532. [Google Scholar] [CrossRef]
- Kondermann, D.; Abraham, S.; Brostow, G.; Förstner, W.; Gehrig, S.; Imiya, A.; Jähne, B.; Klose, F.; Magnor, M.; Mayer, H. On performance analysis of optical flow algorithms. In Outdoor and Large-Scale Real-World Scene Analysis; Springer: New York, NY, USA, 2012; pp. 329–355. [Google Scholar]
- Pfeiffer, D.; Gehrig, S.; Schneider, N. Exploiting the power of stereo confidences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 297–304. [Google Scholar]
- Haeusler, R.; Nair, R.; Kondermann, D. Ensemble Learning for Confidence Measures in Stereo Vision. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 305–312. [Google Scholar]
- Saygili, G.; van der Maaten, L.; Hendriks, E.A. Stereo Similarity Metric Fusion Using Stereo Confidence. In Proceedings of the 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 2161–2166. [Google Scholar]
- Saygili, G.; van der Maaten, L.; Hendriks, E.A. Adaptive stereo similarity fusion using confidence measures. Comput. Vis. Image Underst. 2015, 135, 95–108. [Google Scholar] [CrossRef]
- Mostegel, C.; Rumpler, M.; Fraundorfer, F.; Bischof, H. Using self-contradiction to learn confidence measures in stereo vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4067–4076. [Google Scholar]
- Tosi, F.; Poggi, M.; Tonioni, A.; Di Stefano, L.; Mattoccia, S. Learning confidence measures in the wild. In Proceedings of the 28th British Machine Vision Conference (BMVC 2017), London, UK, 4–7 September 2017; Volume 2. [Google Scholar]
- Savino, G.; Giovannini, F.; Fitzharris, M.; Pierini, M. Inevitable Collision States for Motorcycle-to-Car Collision Scenarios. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2563–2573. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Gil, G.; Savino, G.; Piantini, S.; Pierini, M. Satellite Markers: A Simple Method for Ground Truth Car Pose on Stereo Video; SPIE: Vienna, Austria, 2017. [Google Scholar]
- Geiger, A.; Moosmann, F.; Car, Ö.; Schuster, B. Automatic camera and range sensor calibration using a single shot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3936–3943. [Google Scholar]
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar]
- Pantilie, C.D.; Nedevschi, S. SORT-SGM: Subpixel Optimized Real-Time Semiglobal Matching for Intelligent Vehicles. IEEE Trans. Veh. Technol. 2012, 61, 1032–1042. [Google Scholar] [CrossRef]
- Ramos, S.; Gehrig, S.; Pinggera, P.; Franke, U.; Rother, C. Detecting unexpected obstacles for self-driving cars: Fusing deep learning and geometric modeling. In Proceedings of the Intelligent Vehicles Symposium (IV), 2017 IEEE, Los Angeles, CA, USA, 11–14 June 2017; pp. 1025–1032. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary robust invariant scalable keypoints. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Miksik, O.; Mikolajczyk, K. Evaluation of local detectors and descriptors for fast feature matching. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012), Tsukuba, Japan, 11–15 November 2012; pp. 2681–2684. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. Freak: Fast retina keypoint. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 510–517. [Google Scholar]
- Schaeffer, C. A Comparison of Keypoint Descriptors in the Context of Pedestrian Detection: FREAK vs. SURF vs. BRISK. Cité En 2013, 12. [Google Scholar]
- Panchal, P.M.; Panchal, S.R.; Shah, S.K. A comparison of SIFT and SURF. Int. J. Innov. Res. Comput. Commun. Eng. 2013, 1, 323–327. [Google Scholar]
- Gupta, V.K.; Cecil, K. An Analytical Study of SIFT and SURF in Image Registration. Int. J. Eng. Innov. Technol. IJEIT 2014, 3. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Computer Vision—ECCV 2006; Springer: Berlin, Germany, 2006; pp. 404–417. [Google Scholar] [CrossRef]
- Piantini, S.; Grassi, D.; Mangini, M.; Pierini, M.; Spina, R.; Peris, A. A pilot study of an integrated accident research system based on a medical and engineering data in the metropolitan area of Florence. In Proceedings of the International IRCOBI Conference on the Biomechanics of Impact, IRC-12, Dublin, Ireland, 12–14 September 2012; Volume 11, pp. 10–21. [Google Scholar]
- Piantini, S.; Grassi, D.; Mangini, M.; Pierini, M.; Zagli, G.; Spina, R.; Peris, A. Advanced accident research system based on a medical and engineering data in the metropolitan area of Florence. BMC Emerg. Med. 2013, 13, 3. [Google Scholar] [CrossRef] [PubMed]
- Savino, G.; Piantini, S.; Gil, G.; Pierini, M. Obstacle detection test in real-word traffic contexts for the purposes of motorcycle autonomous emergency braking (MAEB). arXiv 2017, arXiv:1707.03435. [Google Scholar]
- Jin, E.; Phillips, J.; Farnand, S.; Belska, M.; Tran, V.; Chang, E.; Wang, Y.; Tseng, B. Towards the Development of the IEEE P1858 CPIQ Standard—A validation study. Electron. Imaging 2017, 2017, 88–94. [Google Scholar] [CrossRef]
- Kobayashi, M.; Onuki, Y.; Kawabata, K.; Sekine, H.; Tsuboi, T.; Matsuno, Y.; Takahashi, H.; Koizumi, T.; Sakurai, K.; Yuzurihara, H. 4.5 A 1.8 e rms- temporal noise over 110dB dynamic range 3.4 μm pixel pitch global shutter CMOS image sensor with dual-gain amplifiers, SS-ADC and multiple-accumulation shutter. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 74–75. [Google Scholar]
- Machida, S.; Shishido, S.; Tokuhara, T.; Yanagida, M.; Yamada, T.; Izuchi, M.; Sato, Y.; Miyake, Y.; Nakata, M.; Murakami, M. 4.7 A 2.1 Mpixel organic-film stacked RGB-IR image sensor with electrically controllable IR sensitivity. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 78–79. [Google Scholar]
- Gehrig, S.; Reznitskii, M.; Schneider, N.; Franke, U.; Weickert, J. Priors for Stereo Vision under Adverse Weather Conditions. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, NSW, Australia, 2–8 December 2013; pp. 238–245. [Google Scholar]
- Scharwächter, T. Stixel-Based Target Existence Estimation under Adverse Conditions. In German Conference on Pattern Recognition; Springer: New York, NY, USA, 2013; pp. 225–230. [Google Scholar]
- Iqbal, M.; Morel, M.; Meriaudeau, F. A survey on outdoor water hazard detection. Skripsi Program Studi Siste Informasi 2009, 33–40. [Google Scholar]
- Kim, J.; Baek, J.; Choi, H.; Kim, E. Wet area and puddle detection for Advanced Driver Assistance Systems (ADAS) using a stereo camera. Int. J. Control. Autom. Syst. 2016, 14, 263–271. [Google Scholar] [CrossRef]
- Zbontar, J.; LeCun, Y. Computing the stereo matching cost with a convolutional neural network. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1592–1599. [Google Scholar]
- Fortuny-Guasch, J.; Chareau, J.-M.; European Commission; Joint Research Centre; Institute for the Protection and the Security of the Citizen. Radar Cross Section Measurements of Pedestrian Dummies and Humans in the 24/Establishment of a Reference Library of RCS Signatures of Pedestrian Dummies in the Automotive Radar Bands; Publications Office: Luxembourg, 2013; ISBN 978-92-79-28230-0. [Google Scholar]
- Köhler, M.; Hasch, J.; Blöcher, H.L.; Schmidt, L.-P. Feasibility of automotive radar at frequencies beyond 100 GHz. Int. J. Microw. Wirel. Technol. 2013, 5, 49–54. [Google Scholar] [CrossRef]















| Short-Range: Camera Pair III-IV | Long-Range: Camera Pair 2-1 | ||||
|---|---|---|---|---|---|
| Baseline (cm) | 15.0 | Baseline (cm) | 26.5 | ||
| Diag. FoV (°) | 170 | Diag. FoV (°) | 90 | ||
| Depth Field (m) | 1 | 8 | Depth Field (m) | 8 | 22 |
| Resolution | 1280 | 720 | Resolution | 1280 | 720 |
| fps | 30 | fps | 30 | ||
| Camera Pair III-IV | Camera Pair 2-1 | |||
|---|---|---|---|---|
| Far | Near | Far | Near | |
| Disparity (pix) | 17 | 118 | 24 | 57 |
| Depth (m) | 8.382 | 1.207 | 18.936 | 7.973 |
| Depth discretization (m) & Sub-pixel = 1 | 0.465 | 0.010 | 0.757 | 0.137 |
| Depth discretization (m) & Sub-pixel = 1/4 | 0.121 | 0.002 | 0.195 | 0.034 |
| Short-Range: Camera Pair III-IV | Long-Range: Camera Pair 2-1 | ||||||
|---|---|---|---|---|---|---|---|
| Baseline (cm) | 14.9157 | Baseline (cm) | 26.4867 | ||||
| Right Focal length (pix) | Left Focal length (pix) | Right Focal length (pix) | Left Focal length (pix) | ||||
| 897.2688 | 897.6886 | 1027.5 | 1040.7 | 1715.3 | 1719.6 | 1712.6 | 1717.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gil, G.; Savino, G.; Piantini, S.; Pierini, M. Motorcycles that See: Multifocal Stereo Vision Sensor for Advanced Safety Systems in Tilting Vehicles. Sensors 2018, 18, 295. https://doi.org/10.3390/s18010295
Gil G, Savino G, Piantini S, Pierini M. Motorcycles that See: Multifocal Stereo Vision Sensor for Advanced Safety Systems in Tilting Vehicles. Sensors. 2018; 18(1):295. https://doi.org/10.3390/s18010295
Chicago/Turabian StyleGil, Gustavo, Giovanni Savino, Simone Piantini, and Marco Pierini. 2018. "Motorcycles that See: Multifocal Stereo Vision Sensor for Advanced Safety Systems in Tilting Vehicles" Sensors 18, no. 1: 295. https://doi.org/10.3390/s18010295
APA StyleGil, G., Savino, G., Piantini, S., & Pierini, M. (2018). Motorcycles that See: Multifocal Stereo Vision Sensor for Advanced Safety Systems in Tilting Vehicles. Sensors, 18(1), 295. https://doi.org/10.3390/s18010295