A Low-Cost Approach to Automatically Obtain Accurate 3D Models of Woody Crops



Abstract
:1. Introduction
2. Materials and Methods
2.1. The Acquisition Equipment at the Field
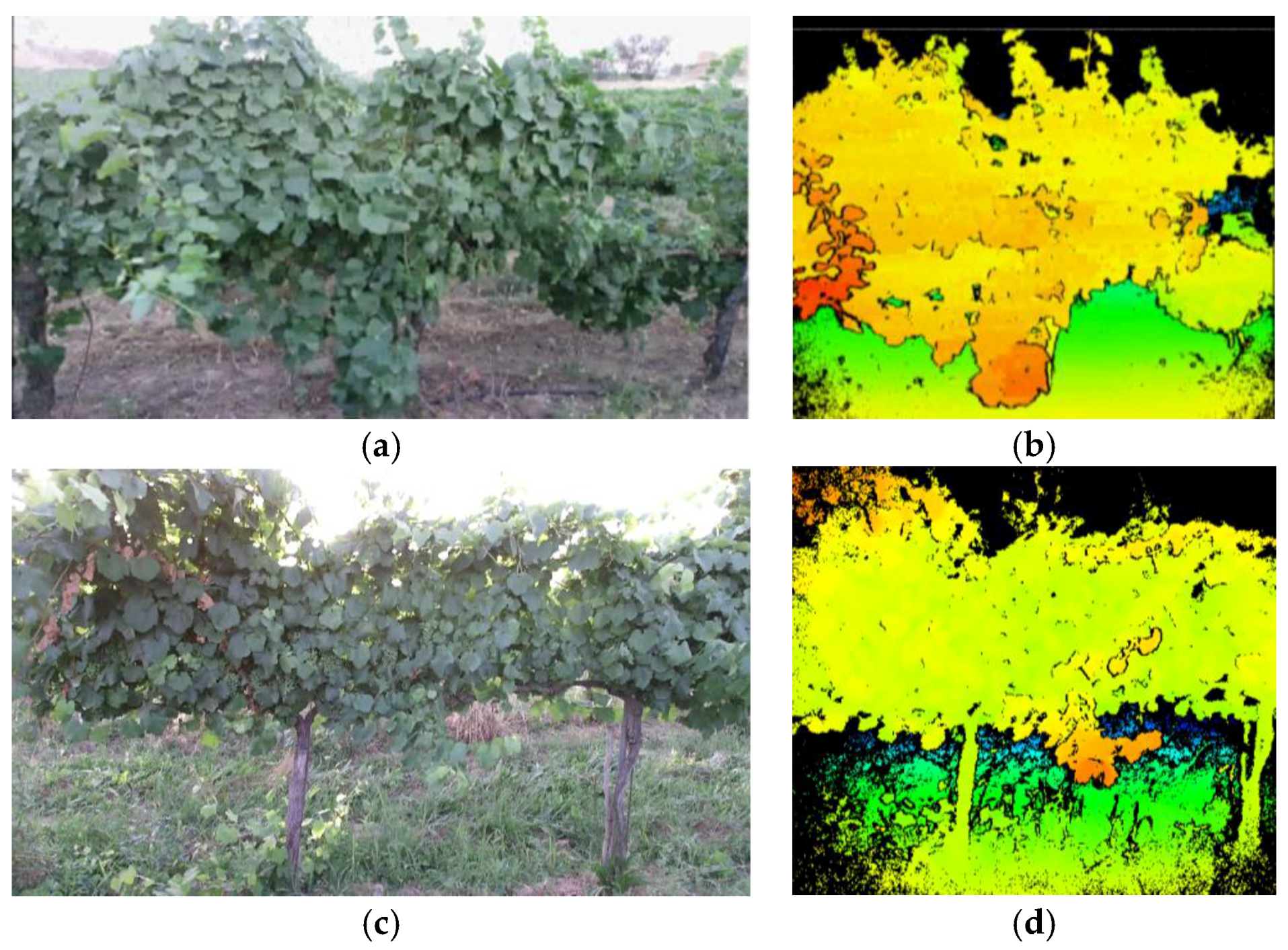
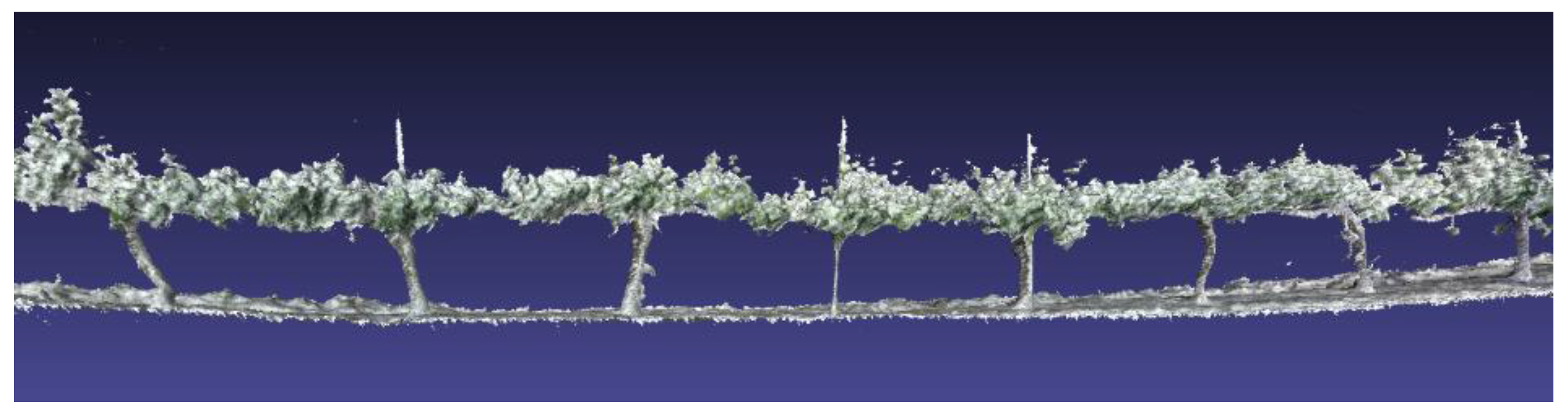
2.2. 3D Reconstruction Approach
2.2.1. Filtering
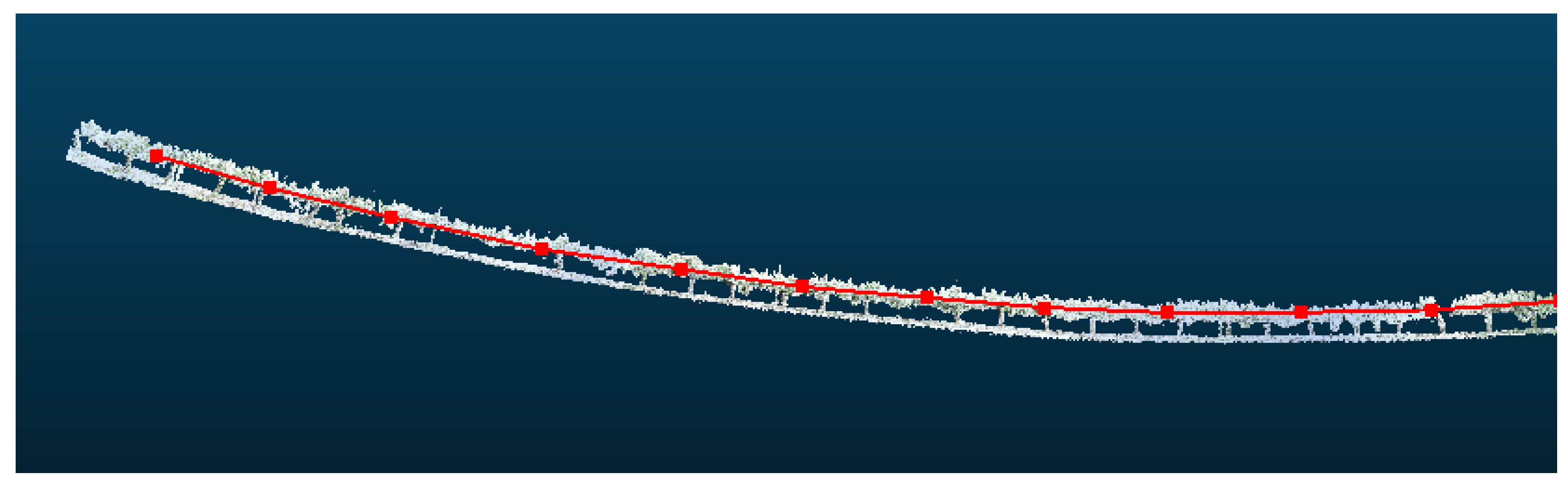
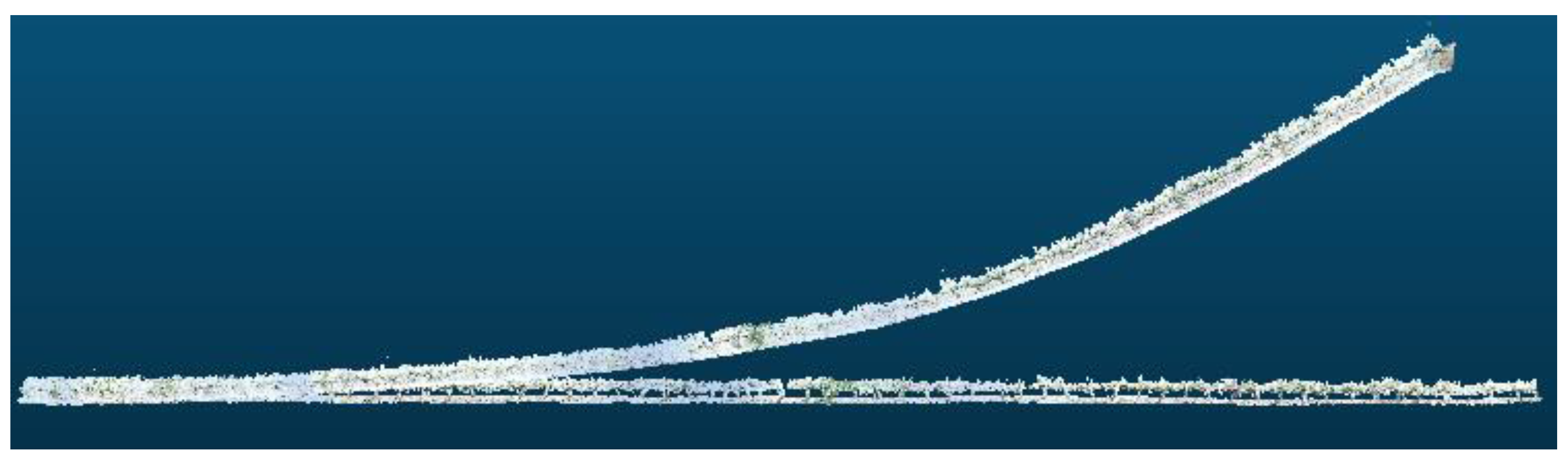
2.2.2. Estimation of a Model Line
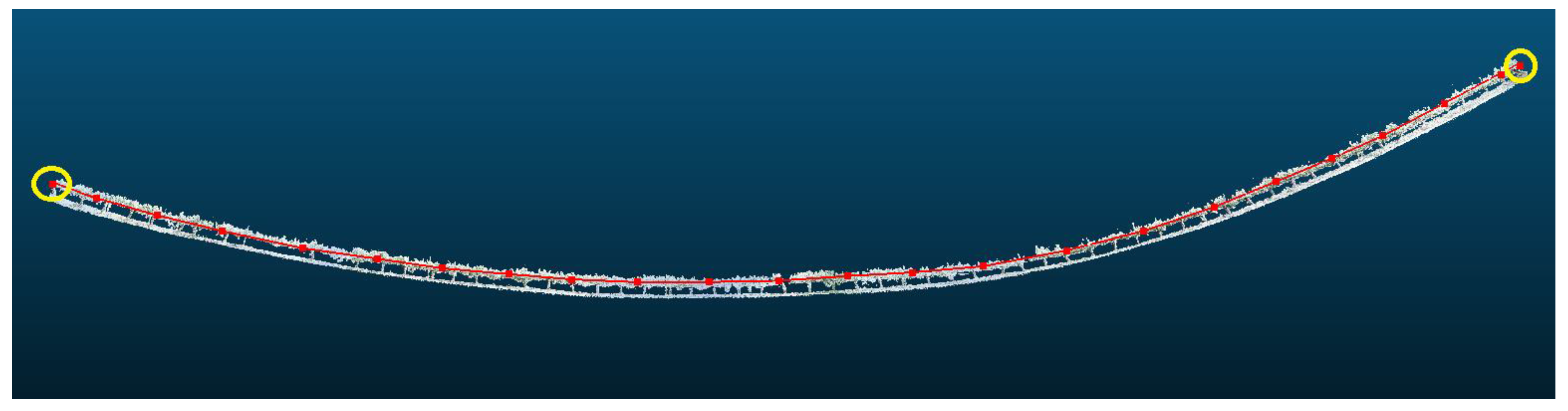
2.2.3. Splitting the Model Line into Sections of the Same Length
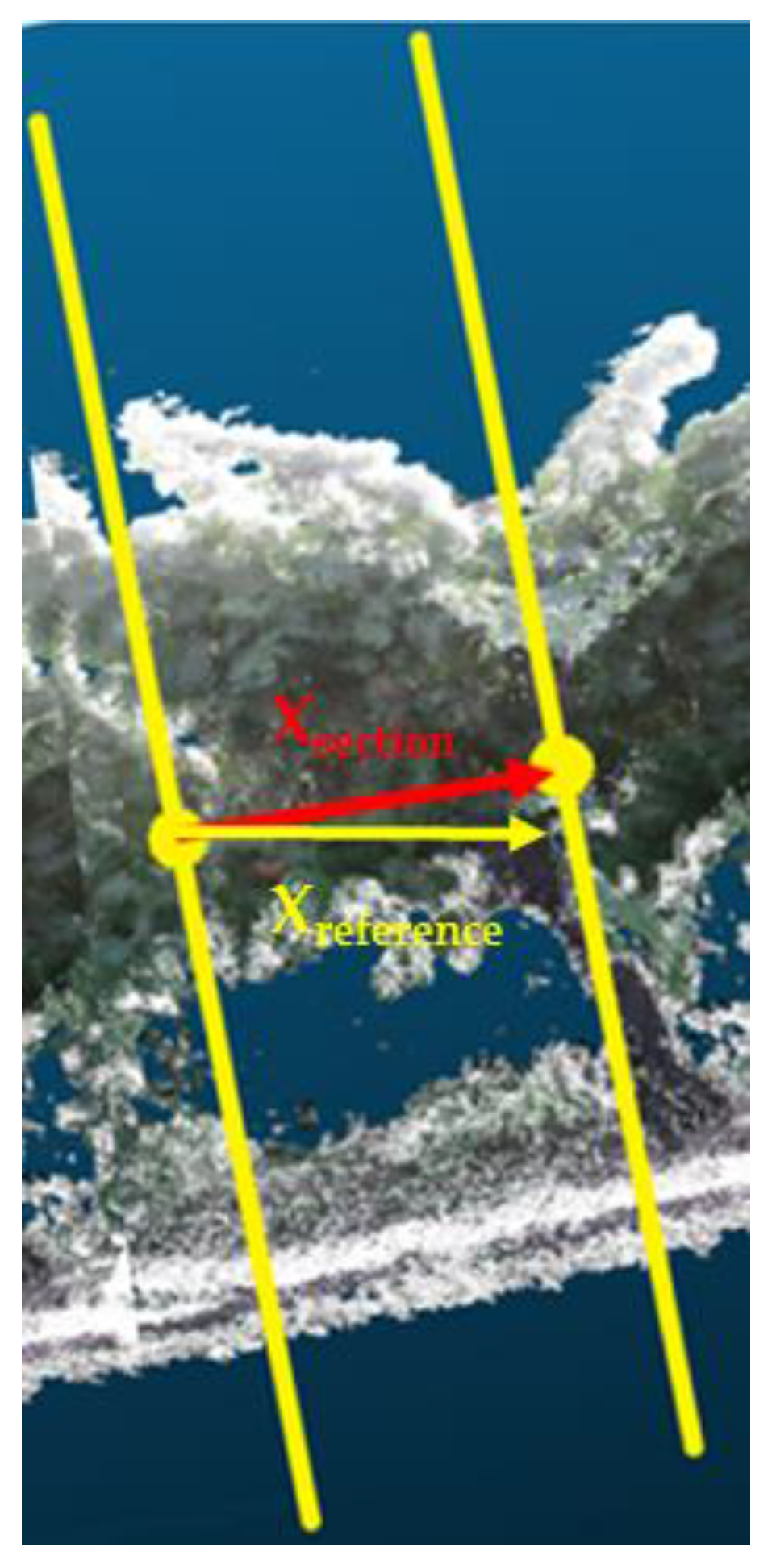
2.2.4. Section Correction
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- West, P.W. Tree and Forest Measurement; Springer: Heidelberg, Germany, 2009; Volume 20. [Google Scholar]
- Paulus, S.; Behmann, J.; Mahlein, A.-K.; Plümer, L.; Kuhlmann, H. Low-cost 3D systems: Suitable tools for plant phenotyping. Sensors 2014, 14, 3001–3018. [Google Scholar] [CrossRef] [PubMed]
- Andújar, D.; Dorado, J.; Fernández-Quintanilla, C.; Ribeiro, A. An Approach to the Use of Depth Cameras for Weed Volume Estimation. Sensors 2016, 16, 972. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, C. Size estimation of sweet onions using consumer-grade RGB-depth sensor. J. Food Eng. 2014, 142, 153–162. [Google Scholar] [CrossRef]
- Hilton, A.; Stoddart, A.; Illingworth, J.; Windeatt, T. Reliable surface reconstruction from multiple range images. In Proceedings of the 4th European Conference on Computer Vision, Cambridge, UK, 15–18 April 1996; pp. 117–126. [Google Scholar]
- Curless, B.; Levoy, M. A volumetric method for building complex models from range images. In Proceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, New Orleans, LA, USA, 4–9 August 1996; pp. 303–312. [Google Scholar]
- Wheeler, M.D.; Sato, Y.; Ikeuchi, K. Consensus surfaces for modeling 3D objects from multiple range images. In Proceedings of the Sixth International Conference on Computer Vision, Bombay, India, 7 January 1998; pp. 917–924. [Google Scholar]
- Zhou, Q.-Y.; Koltun, V. Dense scene reconstruction with points of interest. ACM Trans. Graph. 2013, 32, 112. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Real-time dense surface mapping and tracking. In Proceedings of the 2011 10th IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Izadi, S.; Newcombe, R.A.; Kim, D.; Hilliges, O.; Molyneaux, D.; Hodges, S.; Kohli, P.; Shotton, J.; Davison, A.J.; Fitzgibbon, A. Kinectfusion: Real-time dynamic 3d surface reconstruction and interaction. In Proceedings of the ACM SIGGRAPH 2011 Talks, Vancouver, BC, Canada, 7–11 August 2011; p. 23. [Google Scholar]
- Microsoft Kinect for Windows Software Development Kit 2.0. Available online: https://developer.microsoft.com/es-es/windows/kinect/develop (accessed on 9 August 2017).
- Steinbrucker, F.; Kerl, C.; Cremers, D. Large-scale multi-resolution surface reconstruction from RGB-D sequences. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 3264–3271. [Google Scholar]
- Whelan, T.; Kaess, M.; Fallon, M.; Johannsson, H.; Leonard, J.; McDonald, J. Kintinuous: Spatially Extended Kinectfusion. Available online: https://dspace.mit.edu/handle/1721.1/71756 (accessed on 9 August 2017).
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D reconstruction at scale using voxel hashing. ACM Trans. Graph. 2013, 32, 169. [Google Scholar] [CrossRef]
- Zeng, M.; Zhao, F.; Zheng, J.; Liu, X. Octree-based fusion for realtime 3D reconstruction. Graph. Models 2013, 75, 126–136. [Google Scholar] [CrossRef]
- Chen, J.; Bautembach, D.; Izadi, S. Scalable real-time volumetric surface reconstruction. ACM Trans. Graph. 2013, 32, 113. [Google Scholar] [CrossRef]
- Pagliari, D.; Pinto, L. Calibration of Kinect for Xbox One and comparison between the Two Generations of Microsoft Sensors. Sensors 2015, 11, 27569–27589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect v2 for mobile robot navigation: Evaluation and modeling. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 388–394. [Google Scholar]
- Anderson, C.D.; Anderson, J. Electric and Hybrid Cars: A history; McFarland: Jefferson, NC, USA, 2010. [Google Scholar]
- Conesa-Munoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Efficient Distribution of a Fleet of Heterogeneous Vehicles in Agriculture: A Practical Approach to Multi-path Planning. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Vila Real, Portugal, 8–10 April 2015; pp. 56–61. [Google Scholar]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Roth, S.D. Ray casting for modeling solids. Comput. Graph. Image Process. 1982, 18, 109–144. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Euler, L. Formulae generales pro translatione quacunque corporum rigidorum. Novi Acad. Sci. Petrop 1775, 20, 189–207. [Google Scholar]
- Rodrigues, O. Des lois géométriques qui régissent les déplacements d’un système solide dans l’espace: Et de la variation des cordonnées provenant de ces déplacements considérés indépendamment des causes qui peuvent les produire. In Journal de Mathématiques Pures et Appliquées; Gauthier-Villars: Paris, France, 1840; pp. 380–440. [Google Scholar]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; Volume 21, pp. 163–169. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling | Number of Points | Mean Angle (°) | Std. Dev. Angle (°) | Maximum Angle (°) | 3D Reconstruction Time (s) | Model Line Length (m) |
|---|---|---|---|---|---|---|
| February | 4,289,633 | 3.56 | 3.33 | 13.82 | 42.46 | 86.30 |
| May | 6,441,484 | 3.99 | 2.42 | 8.54 | 64.03 | 89.69 |
| July | 13,624,626 | 5.02 | 2.83 | 9.57 | 83.76 | 93.81 |
| Sampling | Number of Points | Mean Angle (°) | Std. Dev. Angle (°) | Maximum Angle (°) | 3D Reconstruction Time (s) | Length of Model Line (m) |
|---|---|---|---|---|---|---|
| February | 5,575,934 | 2.39 | 1.80 | 8.63 | 60.52 | 107.21 |
| May | 7,941,965 | 3.72 | 1.96 | 8.09 | 72.85 | 112.00 |
| July | 16,000,906 | 5.39 | 3.31 | 15.49 | 111.09 | 115.93 |
| Crop Row | Sampling | Measures | Downsampling Percentage | |||||
|---|---|---|---|---|---|---|---|---|
| 0% | 50% | 75% | 90% | 99% | 99.9% | |||
| Mean error (°) | - | 0.06 | 0.18 | 0.27 | 0.97 | 1.30 | ||
| 85 m | February | Max. error (°) | - | 0.19 | 0.61 | 1.30 | 3.69 | 3.85 |
| Time (s) | 119.25 | 58.30 | 50.59 | 12.65 | 2.09 | 0.99 | ||
| Mean error (°) | - | 0.05 | 0.09 | 0.11 | 0.23 | 0.75 | ||
| 85 m | May | Max. error (°) | - | 0.17 | 0.29 | 0.30 | 0.68 | 2.54 |
| Time (s) | 213.60 | 89.78 | 65.06 | 18.44 | 2.59 | 1.11 | ||
| Mean error (°) | - | 0.01 | 0.03 | 0.10 | 0.39 | 0.63 | ||
| 85 m | July | Max. error (°) | - | 0.04 | 0.14 | 0.41 | 1.72 | 2.07 |
| Time (s) | 389.49 | 183.65 | 93.38 | 36.04 | 4.62 | 1.67 | ||
| Mean error (°) | - | 0.03 | 0.05 | 0.09 | 0.34 | 0.42 | ||
| 105 m | February | Max. error (°) | - | 0.10 | 0.22 | 0.26 | 1.61 | 1.61 |
| Time (s) | 155.01 | 75.77 | 65.76 | 16.43 | 2.73 | 1.21 | ||
| Mean error (°) | - | 0.05 | 0.05 | 0.16 | 0.40 | 0.85 | ||
| 105 m | May | Max. error (°) | - | 0.18 | 0.10 | 0.60 | 1.49 | 3.37 |
| Time (s) | 263.35 | 110.71 | 85.92 | 22.64 | 3.18 | 1.45 | ||
| Mean error (°) | - | 0.04 | 0.11 | 0.26 | 0.33 | 2.34 | ||
| 105 m | July | Max. error (°) | - | 0.15 | 0.38 | 0.90 | 0.96 | 13.55 |
| Time (s) | 457.52 | 214.68 | 109.66 | 42.23 | 5.32 | 1.97 | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bengochea-Guevara, J.M.; Andújar, D.; Sanchez-Sardana, F.L.; Cantuña, K.; Ribeiro, A. A Low-Cost Approach to Automatically Obtain Accurate 3D Models of Woody Crops. Sensors 2018, 18, 30. https://doi.org/10.3390/s18010030
Bengochea-Guevara JM, Andújar D, Sanchez-Sardana FL, Cantuña K, Ribeiro A. A Low-Cost Approach to Automatically Obtain Accurate 3D Models of Woody Crops. Sensors. 2018; 18(1):30. https://doi.org/10.3390/s18010030
Chicago/Turabian StyleBengochea-Guevara, José M., Dionisio Andújar, Francisco L. Sanchez-Sardana, Karla Cantuña, and Angela Ribeiro. 2018. "A Low-Cost Approach to Automatically Obtain Accurate 3D Models of Woody Crops" Sensors 18, no. 1: 30. https://doi.org/10.3390/s18010030
APA StyleBengochea-Guevara, J. M., Andújar, D., Sanchez-Sardana, F. L., Cantuña, K., & Ribeiro, A. (2018). A Low-Cost Approach to Automatically Obtain Accurate 3D Models of Woody Crops. Sensors, 18(1), 30. https://doi.org/10.3390/s18010030