Sliding Spotlight Mode Imaging with GF-3 Spaceborne SAR Sensor


Abstract
:1. Introduction
2. Gaofen-3 Sliding Spotlight Mode and Signal Characteristics Analysis
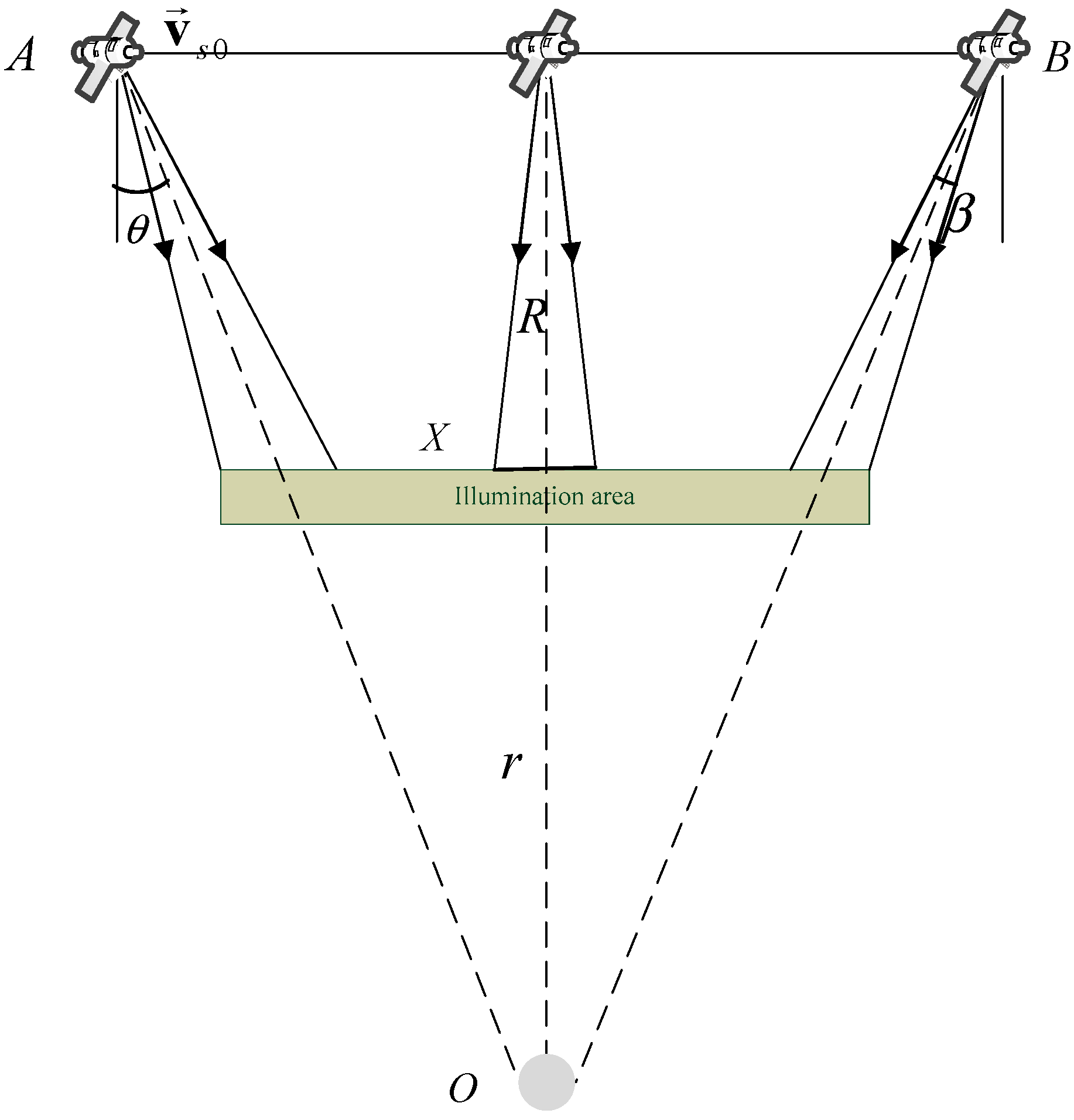
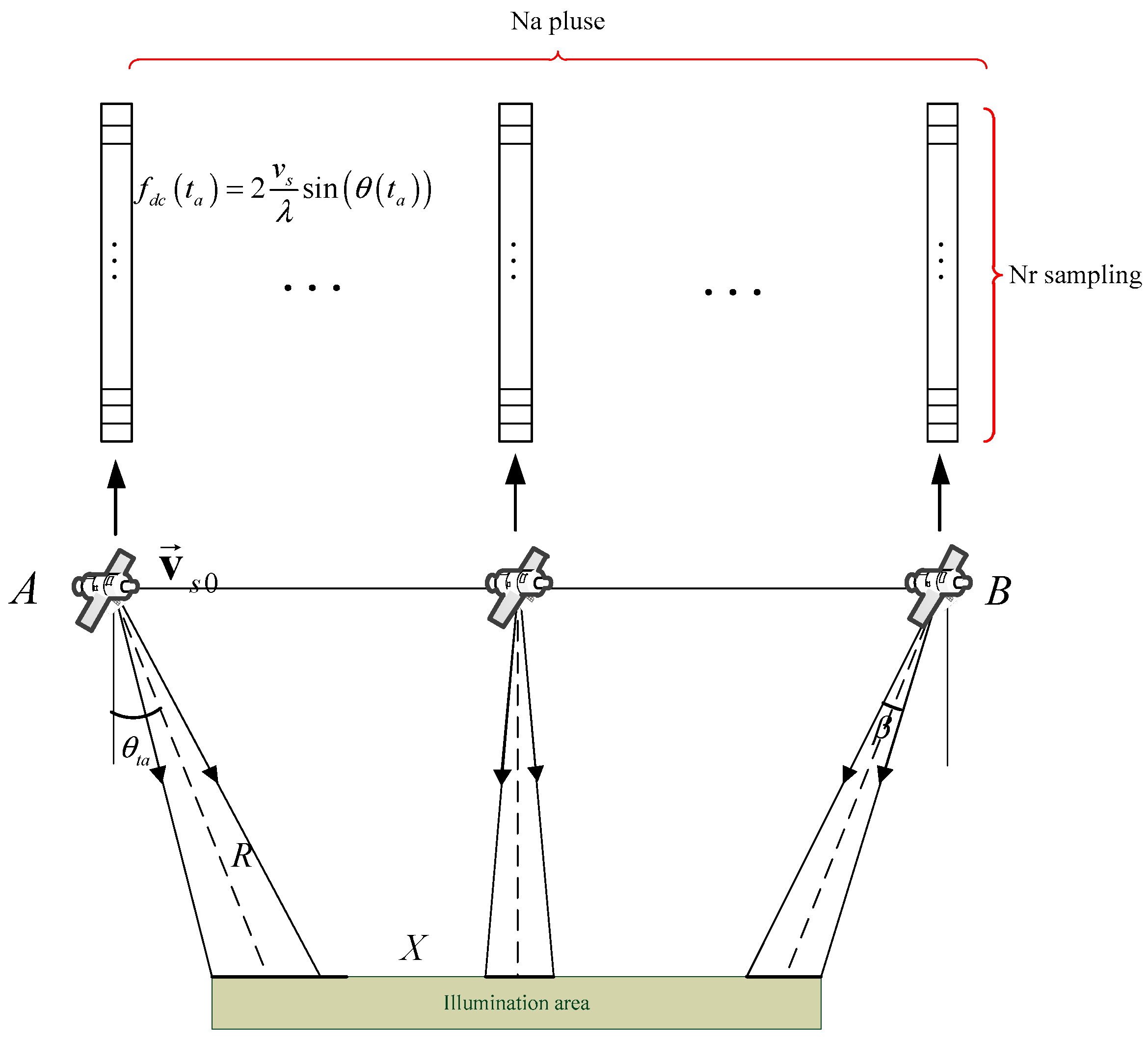
2.1. Gaofen-3 Sliding Spotlight Mode and Imaging Geometry
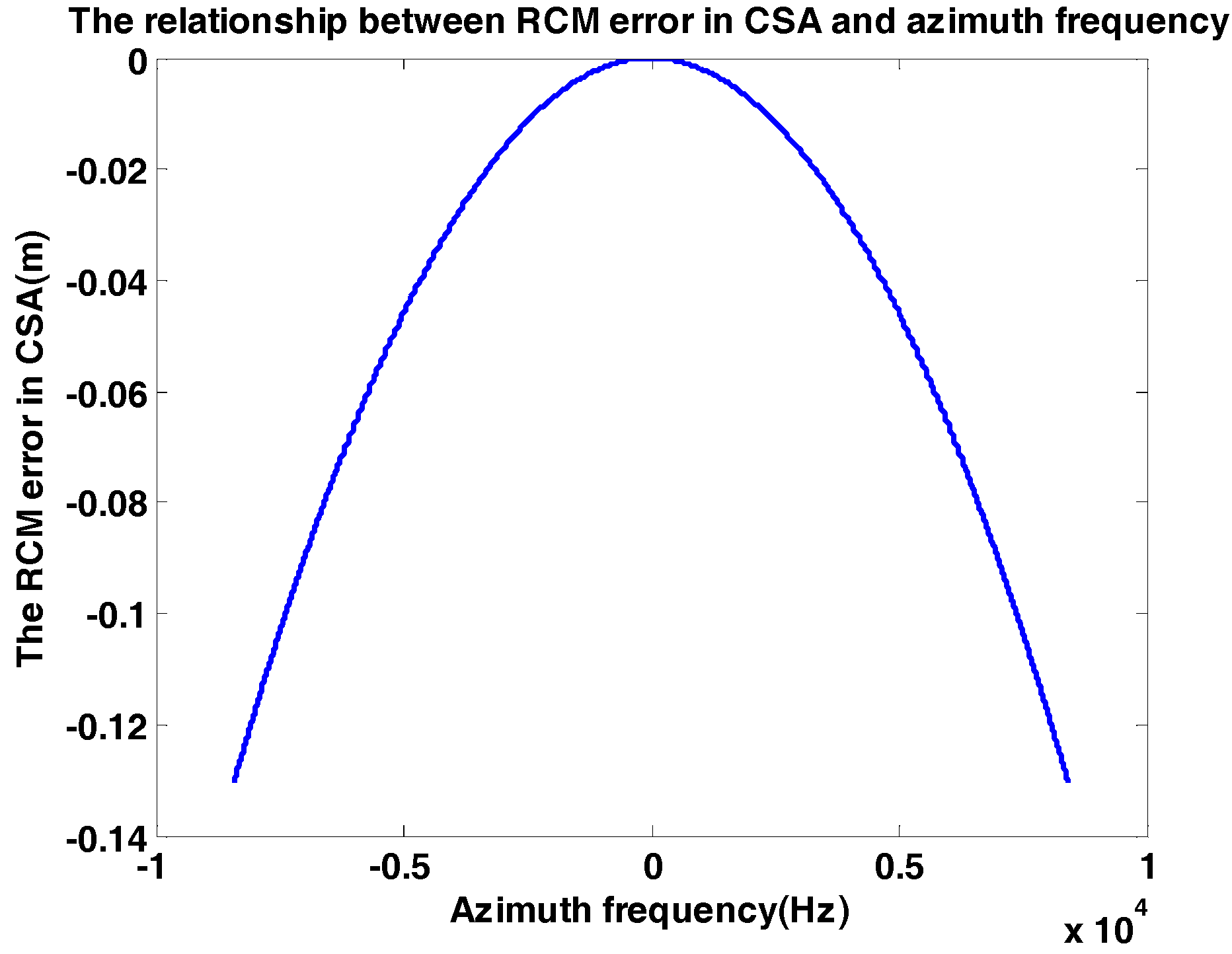
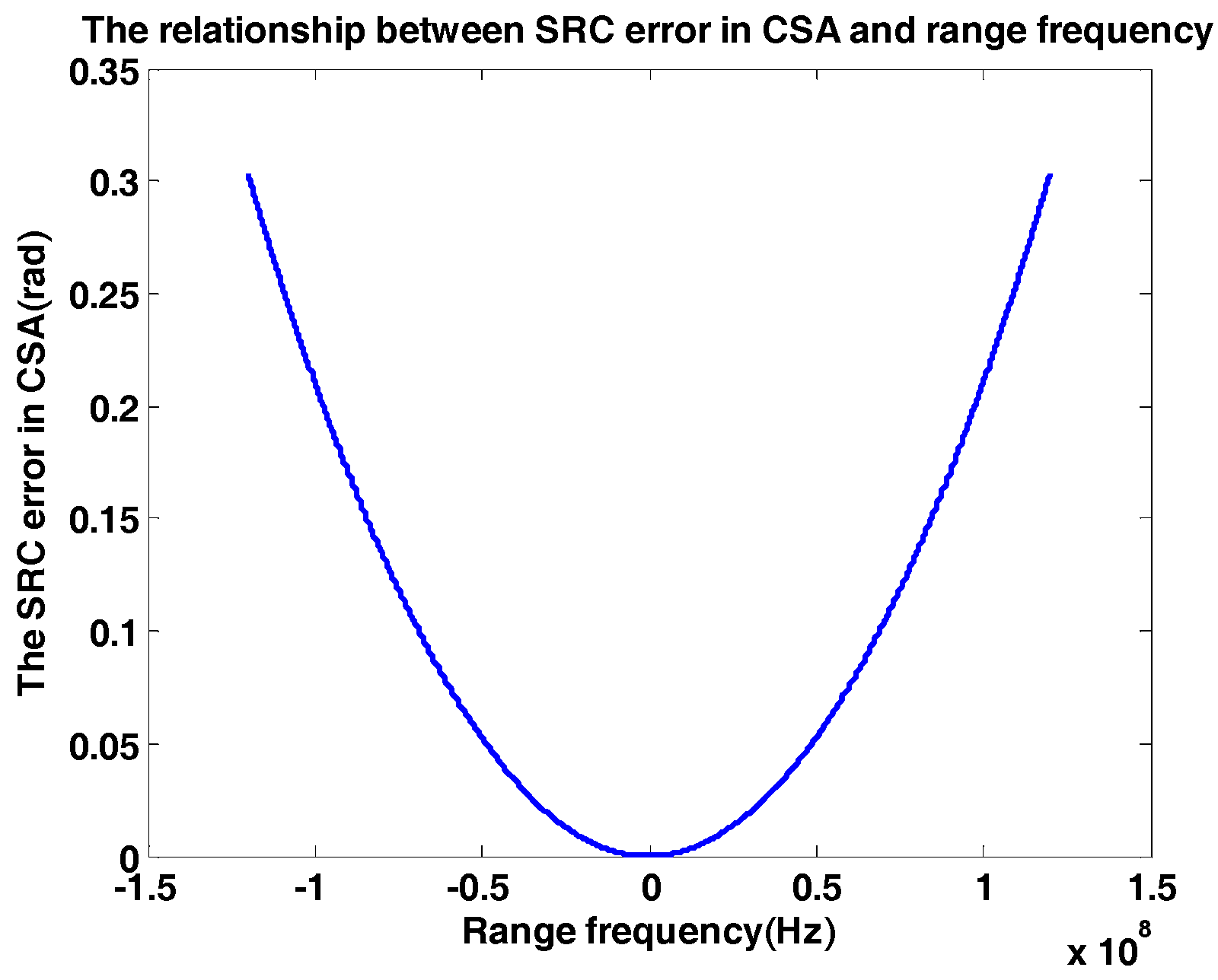
2.2. Properties of the Echo Signal and Imaging Algorithm Consideration
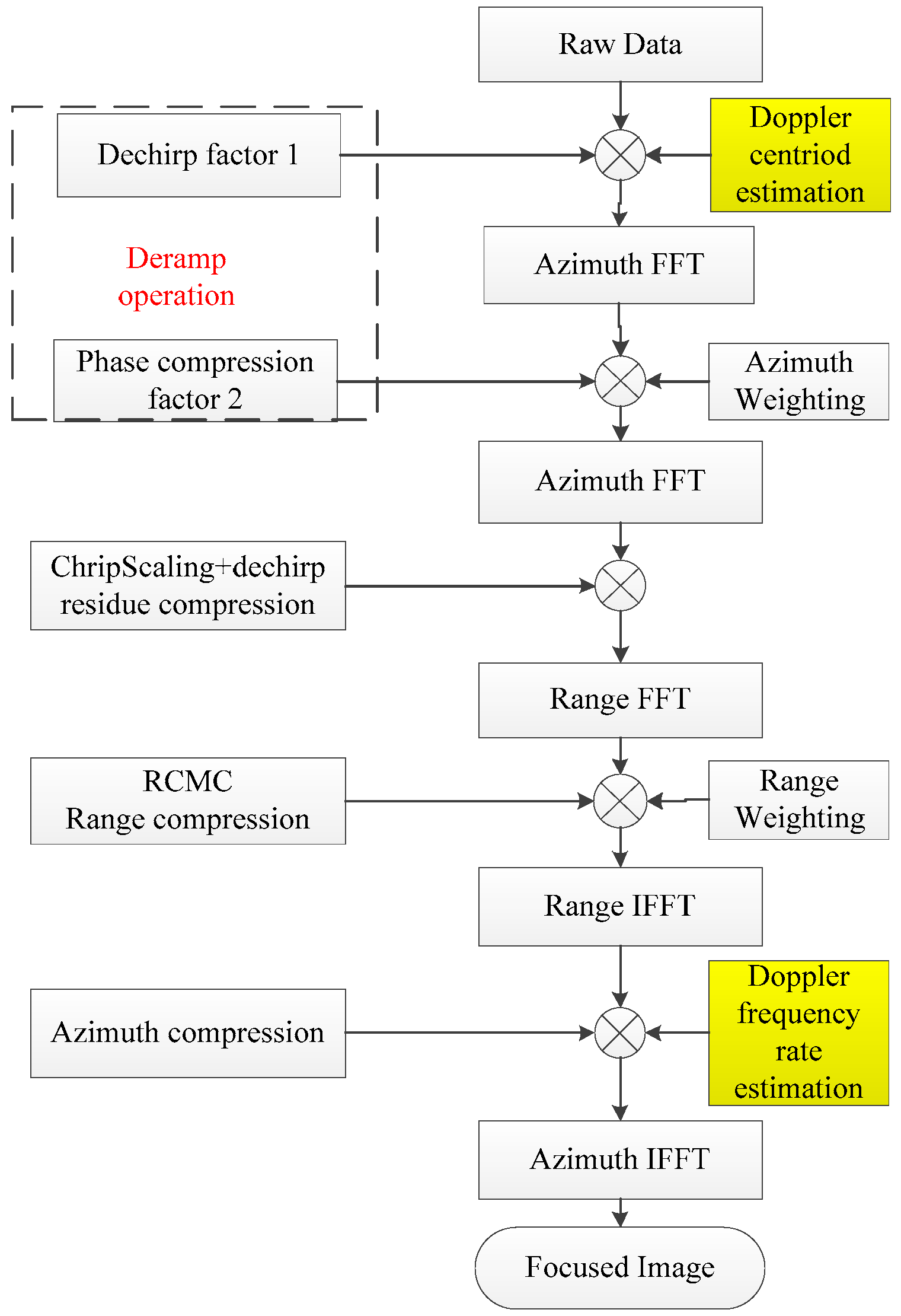
3. Processing Overview
3.1. Azimuth Preprocessing in Sliding Spotlight Mode
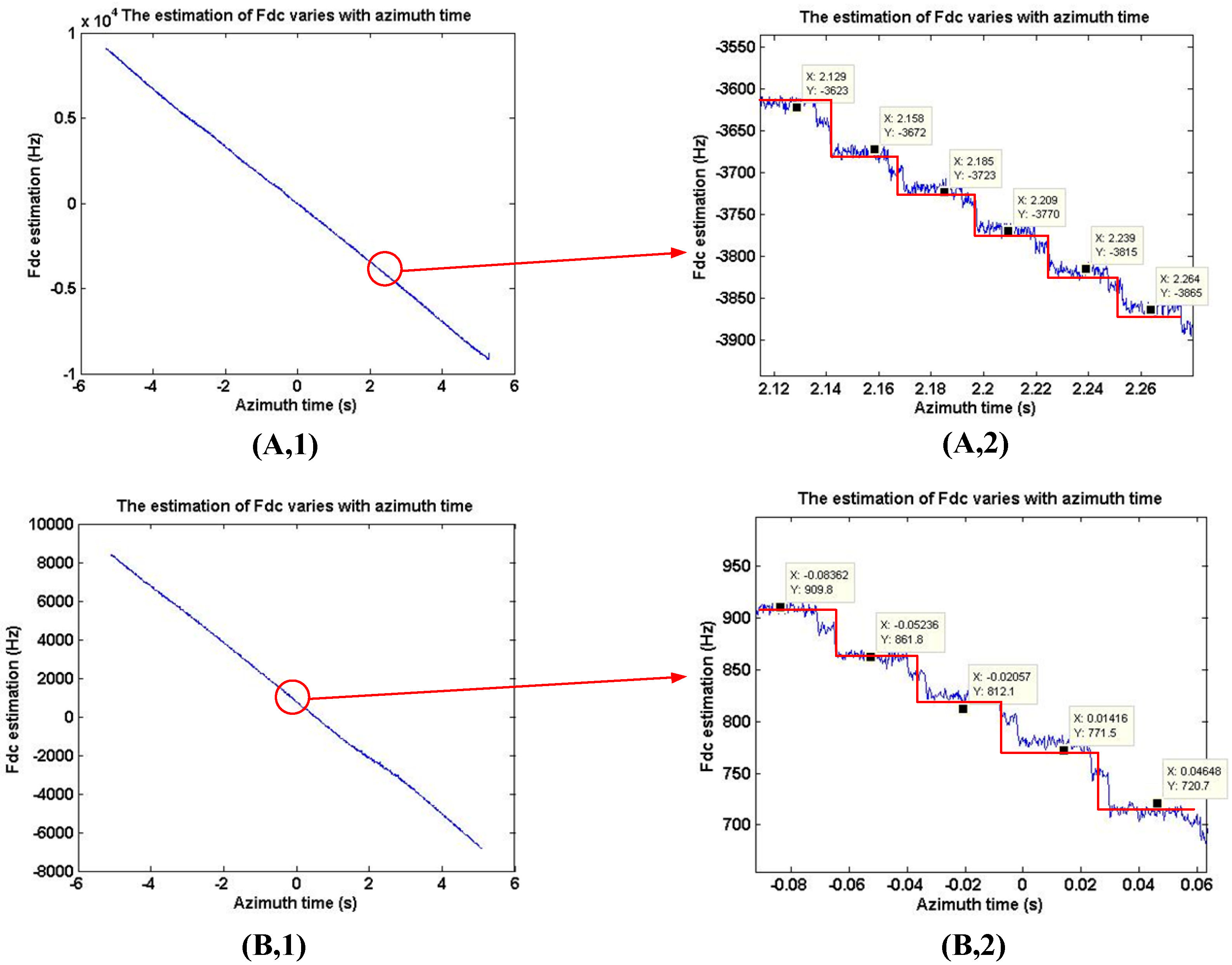
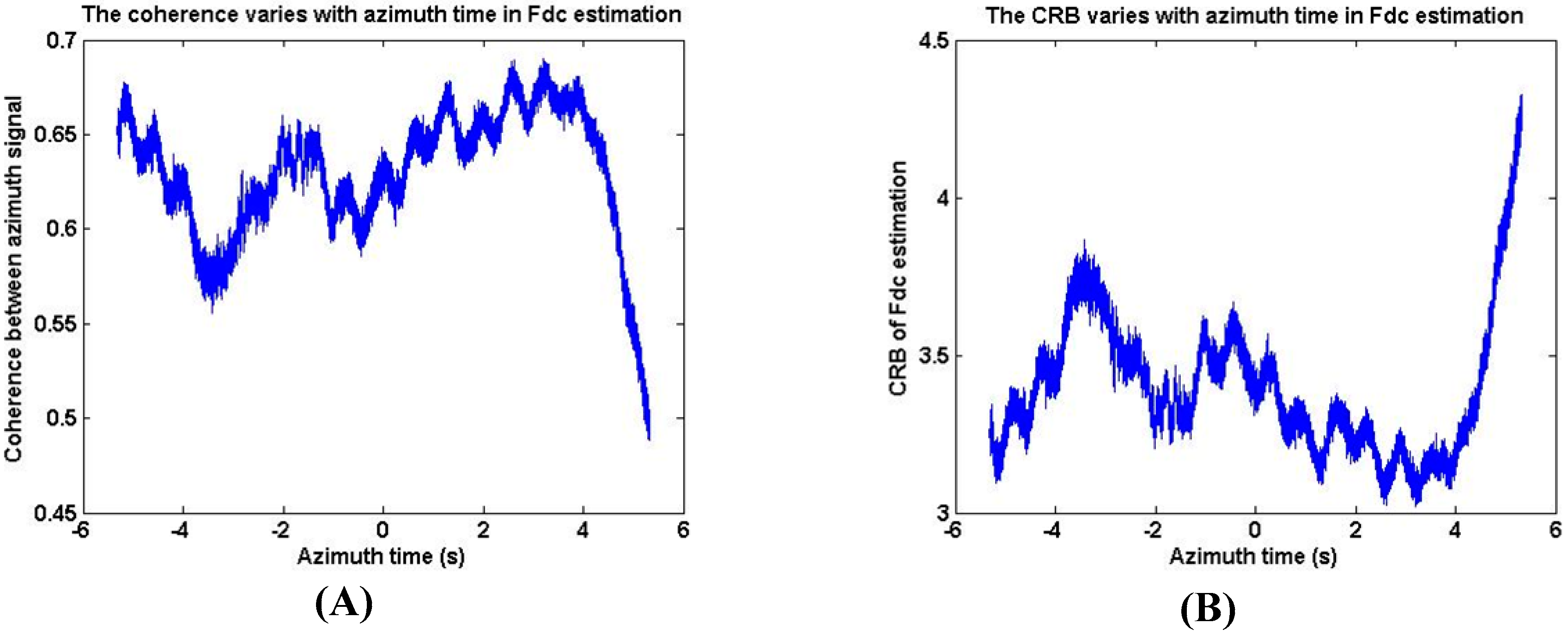
3.2. The Estimation of Doppler Centroid in Sliding Spotlight Mode
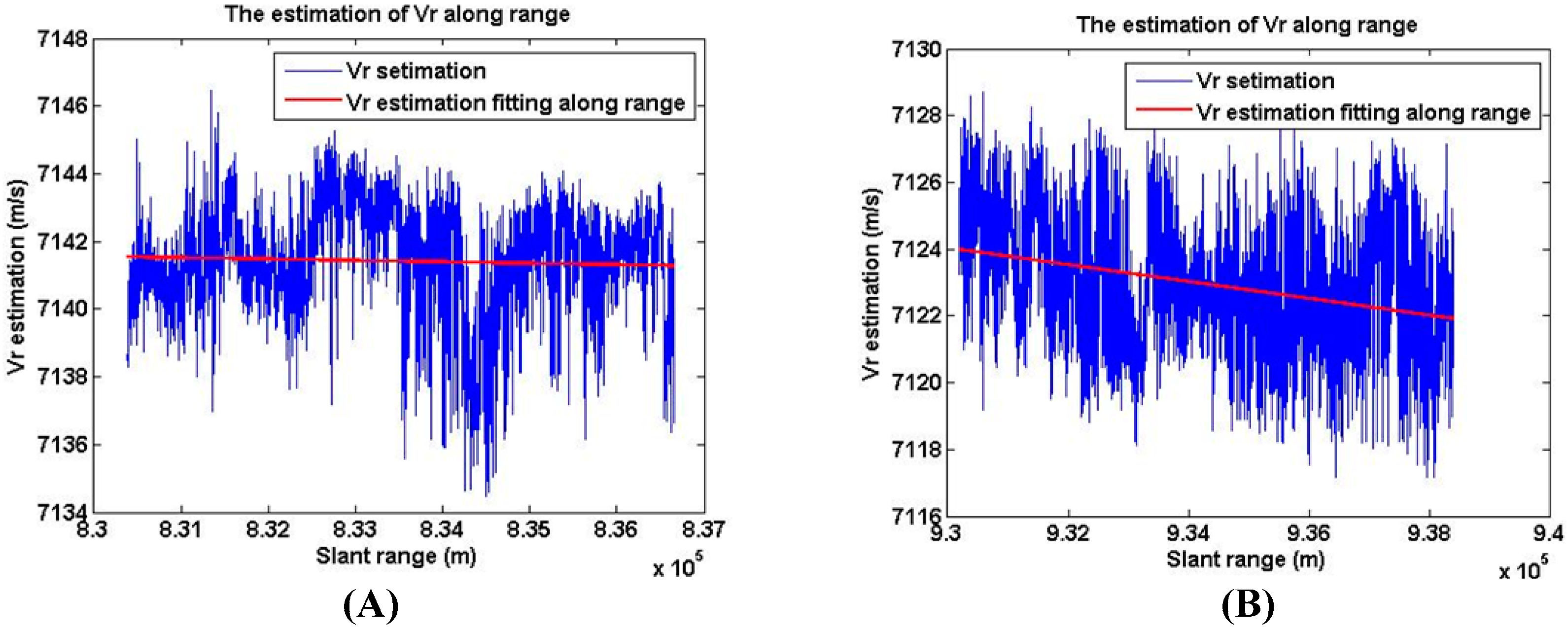
3.3. The Estimation of Doppler Frequency Modulation Rate in Sliding Spotlight Mode
4. Experimental Results
4.1. The Estimation of Doppler Centroid Using GF-3 Real Data
4.2. The Estimation of Doppler Frequency Modulation Rate Using GF-3 Real Data
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Brule, L.; Baeggli, H. Radarsat-2 program update. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toronto, ON, Canada, 24–28 June 2002; pp. 1462–1464. [Google Scholar]
- Caltagirone, F.; Spera, P.; Vigliotti, R.; Manoni, G. Skymed/COSMO mission overview. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Seattle, WA, USA, 6–10 July 1998; Volume 2, pp. 683–685. [Google Scholar]
- Lorusso, R.; Nicoletti, M.; Gallipoli, A.; Lorè, V.A.; Milillo, G.; Lombardi, N.; Nirchio, F. Extension of Wavenumber Domain Focusing for spotlight COSMO-SkyMed SAR Data. Eur. J. Remote Sens. 2015, 48, 49–70. [Google Scholar] [CrossRef]
- Shimada, M. Alos-2 science program. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Meibourne, Australia, 21–26 July 2013; pp. 2400–2403. [Google Scholar]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. Terrasar-x SAR processing and products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Pitz, W.; Miller, D. The TerraSAR-X satellite. IEEE Trans. Geosci. Remote Sens. 2010, 48, 615–622. [Google Scholar] [CrossRef]
- Scheiber, R.; Wollstadt, S.; Sauer, S.; Malz, E. Sentinel-1 imaging performance verification with TerraSAR-X. In Proceedings of the 2010 8th European Conference on Synthetic Aperture Radar (EUSAR), Aachen, Germany, 7–10 June 2010; pp. 55–58. [Google Scholar]
- Janoth, J.; Gantert, S.; Schrage, T.; Kaptein, A. TerraSAR next generation—Mission capabilities. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 2297–2300. [Google Scholar]
- Gantert, S.; Kern, A.; Düring, R.; Janoth, J.; Petersen, L.; Herrmann, J. The future of X-band SAR: TerraSAR-X next generation and worldSAR constellation. In Proceedings of the 2013 Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013; pp. 20–23. [Google Scholar]
- Blecher, D.P.; Baker, C.J. High resolution processing of hybrid strip-map/spotlight mode SAR. IEE Proc. Radar Sonar Navig. 1996, 143, 366–374. [Google Scholar] [CrossRef]
- Zhang, Q.J. System design and key technologies of the GF-3 satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Yun, F. GF-3 satellite. Satell. Appl. 2016, 8, 80. [Google Scholar]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR Data Focusing Based on a Two-Step Processing Approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2003. [Google Scholar] [CrossRef]
- Liu, F.F.; Ding, Z.G.; Zeng, T.; Long, T. Performance Analysis of Two-Step Algorithm in Sliding Spotlight Space-borne SAR. In Proceedings of the IEEE Radar Conference, Arlington, TX, USA, 10–14 May 2010; pp. 965–968. [Google Scholar]
- Mittermayer, J.; Lord, R.; Borner, E. Sliding Spotlight SAR Processing for TerraSAR-X Using a New Formulation of the Extended Chirp Scaling Algorithm. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium(IGARSS), Toulouse, France, 21–25 July 2003; pp. 1462–1464. [Google Scholar]
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Sun, G.-C.; Yang, C.; Yang, J.; Xing, M.; Bao, Z. Processing of very high resolution spaceborne sliding spotlight SAR data using velocity scaling. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1505–1518. [Google Scholar] [CrossRef]
- Yang, W.; Chen, J.; Liu, W.; Wang, P.; Li, C. A Modified Three-Step Algorithm for Tops and Sliding Spotlight SAR Data Processing. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6910–6921. [Google Scholar] [CrossRef]
- McDonough, R.N.; Raff, B.E.; Kerr, J.L. Image formation from spaceborne synthetic aperture radar signals. Johns Hopkins APL Tech. Dig. 1985, 6, 300–312. [Google Scholar]
- Li, F.-K.; Held, D.N.; Curlander, J.C.; Wu, C. Doppler parameter estimation for spaceborne synthetic-aperture radars. IEEE Trans. Geosci. Remote Sens. 1985, 1, 47–56. [Google Scholar] [CrossRef]
- Madsen, S.N. Estimating the Doppler Centroid of SAR Data. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 134–140. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Li, X.; Lin, M.; Shi, J.; Zhang, S. Maximum-likelihood-based Doppler centroid estimation algorithm for MC-HRWS SAR system. Electron. Lett. 2014, 50, 1630–1631. [Google Scholar] [CrossRef]
- Curlander, J.C.; Wu, C.; Pang, A. Automated processing of spaceborne SAR data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 1–4 June 1982; Volume 1, pp. 3–6. [Google Scholar]
- Ran, L.; Liu, Z.; Li, T.; Xie, R.; Zhang, L. Extension of Map-Drift Algorithm for Highly Squinted SAR Autofocus. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 4032–4044. [Google Scholar] [CrossRef]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Jakowatz, C.V.; Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Thompson, P.A. Spotlight-Mode Synthetic Aperture Radar: A Signal Processing Approach; Kluwer Academic: Boston, MA, USA, 1996. [Google Scholar]
- Berizzi, F.; Corsini, G. Autofocusing of inverse synthetic aperture radar images using contrast optimization. IEEE Trans. Geosci. Remote Sens. 1996, 32, 1185–1191. [Google Scholar] [CrossRef]
- Yao, Y.; Song, W.; Ye, S. An Improved Autofocus Approach Based on 2-D Inverse Filtering for Airborne Spotlight SAR. In Proceedings of the 2016 CIE International Conference on Radar, Guangzhou, China, 10–13 October 2016. [Google Scholar]
- Davidson, G.W.; Cumming, I.G.; Ito, M.R. A Chirp Scaling Approach for Processing Squint Mode SAR Data. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 121–133. [Google Scholar] [CrossRef]
- An, D.X.; Huang, X.T.; Jin, T.; Zhou, Z.M. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Bao, Z.; Xing, M.; Wang, T. Radar Imaging Technique; Electronics Industry: Beijing, China, 2005. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier Frequency | C band |
| PRF | 4406 Hz |
| Satellite Velocity | 7568 m/s |
| Sample Frequency | 266.66 MHz |
| Bandwidth | 240 MHz |
| Pulsewidth | 35 μs |
| Azimuth Beam Scanning Step | 0.01° |
| Azimuth PSLR (dB) | Azimuth ISLR (dB) | Azimuth Resolution (m) | |
|---|---|---|---|
| Images focusing by proposed Doppler parameter estimation method | −27.7 | −23.6 | 1.14 |
| Images focusing by orbit and satellite attitude parameters | −24.6 | −23.4 | 1.27 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Xiao, F.; Ding, Z.; Ke, M.; Zeng, T. Sliding Spotlight Mode Imaging with GF-3 Spaceborne SAR Sensor. Sensors 2018, 18, 43. https://doi.org/10.3390/s18010043
Zhang Q, Xiao F, Ding Z, Ke M, Zeng T. Sliding Spotlight Mode Imaging with GF-3 Spaceborne SAR Sensor. Sensors. 2018; 18(1):43. https://doi.org/10.3390/s18010043
Chicago/Turabian StyleZhang, Qingjun, Feng Xiao, Zegang Ding, Meng Ke, and Tao Zeng. 2018. "Sliding Spotlight Mode Imaging with GF-3 Spaceborne SAR Sensor" Sensors 18, no. 1: 43. https://doi.org/10.3390/s18010043
APA StyleZhang, Q., Xiao, F., Ding, Z., Ke, M., & Zeng, T. (2018). Sliding Spotlight Mode Imaging with GF-3 Spaceborne SAR Sensor. Sensors, 18(1), 43. https://doi.org/10.3390/s18010043