Doppler Radar Vital Signs Detection Method Based on Higher Order Cyclostationary


Abstract
:1. Introduction
2. Materials and Methods
2.1. Doppler Radar Vital Sign Model
2.2. Cyclostationary Detection Theory
3. Statistical Property Analysis of Higher Order Cyclostationary Detection
3.1. The Almost Sure Convergence of the Time Varying Cyclic-Moments and the Sample Cyclic-Moments
3.2. The Relation Analysis Between the Finite-Time Average and the Ensemble Average
4. Experiment and Analysis
4.1. The Detection of the Heartbeat and Respiration Rate under Different SNR for Simulation Signals
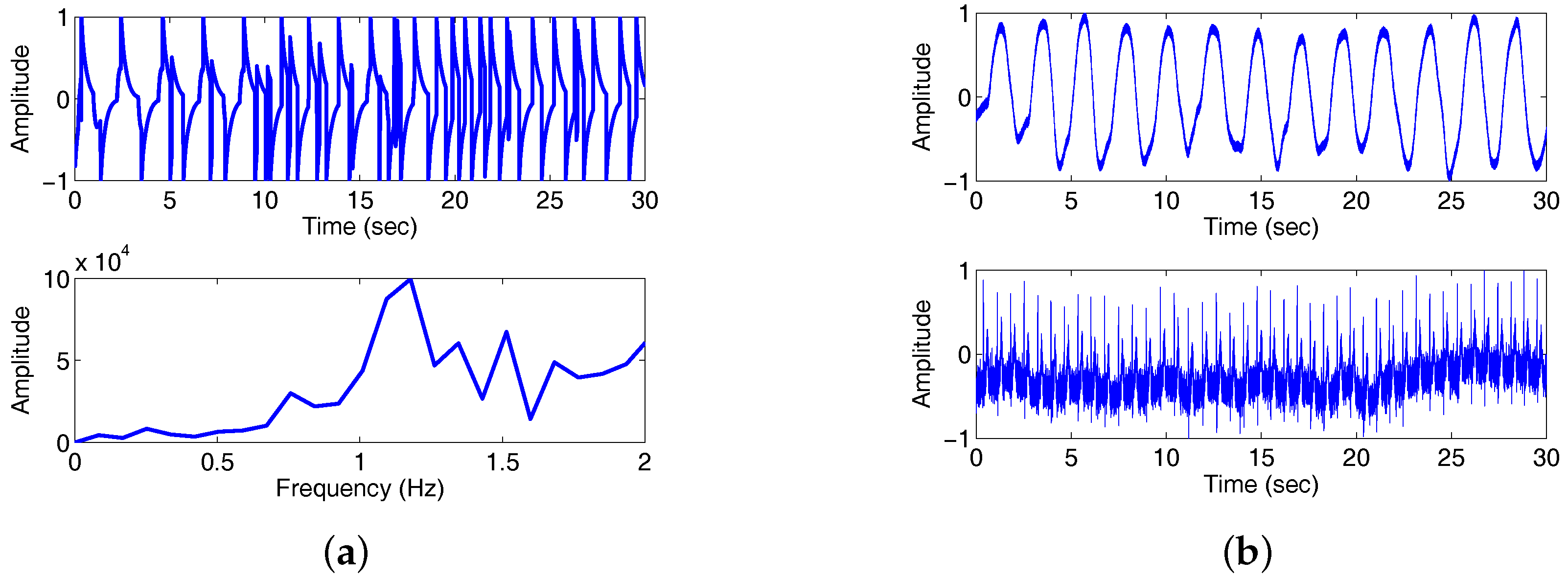
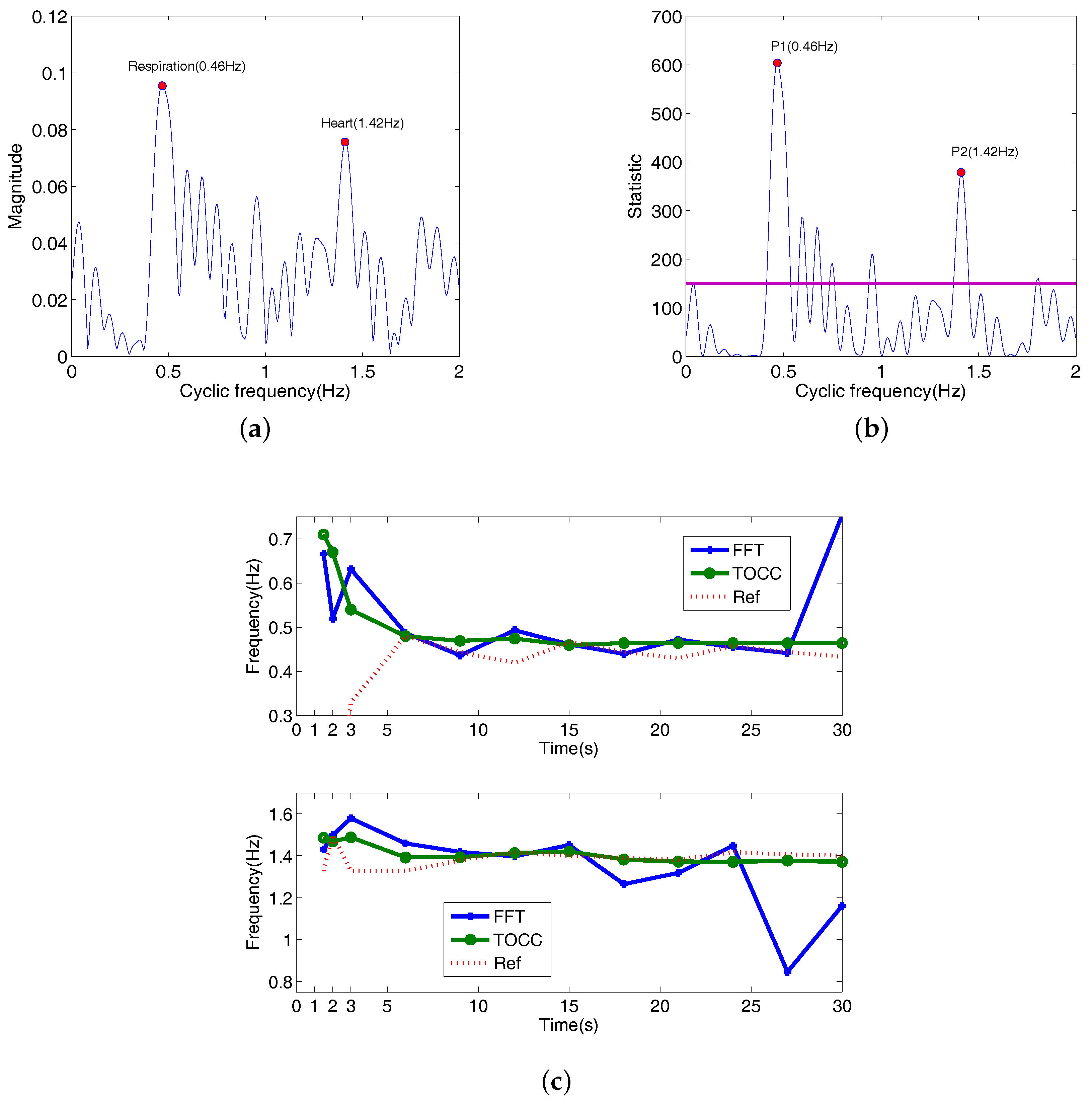
4.2. The Detection of the Heartbeat and Respiration Rate Using the Doppler Radar Signal for a Single Subject
4.3. The Detection of the Heartbeat Rate Using the Doppler Radar Signal for Different Subjects
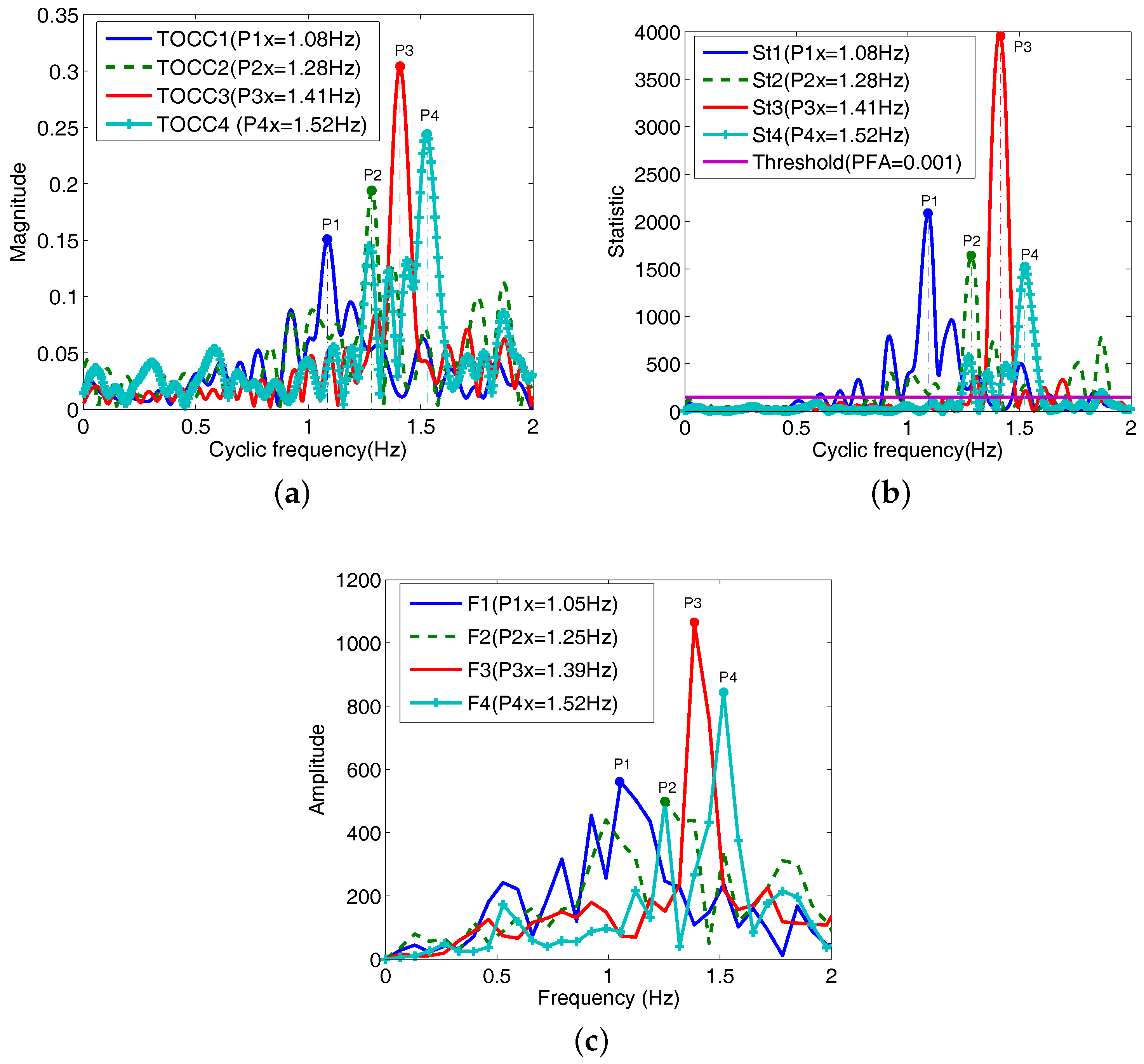
4.4. The Detection of the Respiration Rate Using the Doppler Radar Signal for Multiple Subjects
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Droitcour, A.; Lubecke, V.M.; Lin, J.; Boric-Lubecke, O. A microwave radio for Doppler radar sensing of vital signs. In Proceedings of the 2001 IEEE MTT-S International Microwave Symposium Digest, Phoenix, AZ, USA, 20–24 May 2001; pp. 175–178. [Google Scholar]
- Droitcour, A.D. Non-Contact Measurement of Heart and Respiration Rates With a Single-Chip Microwave Doppler Radar; Stanford University: Stanford, CA, USA, 2006. [Google Scholar]
- Host-Madsen, A.; Petrochilos, N.; Boric-Lubecke, O.; Lubecke, V.M.; Park, B.K.; Zhou, Q. Signal processing methods for Doppler radar heart rate monitoring. In Signal Processing Techniques for Knowledge Extraction and Information Fusion; Mandic, D., Ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Lin, J.C. Non-invasive microwave measurement of respiration. Proc. IEEE 1975, 63, 1530. [Google Scholar] [CrossRef]
- Chuang, H.R.; Chen, Y.F.; Chen, K.M. Automatic clutter-canceler for microwave life-detection systems. IEEE Trans. Instrum. Meas. 1991, 10, 747–750. [Google Scholar] [CrossRef]
- Tariq, A.; Ghafouri-Shiraz, H. Vital signs detection using Doppler radar and continuous wavelet transform. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 285–288. [Google Scholar]
- Tu, J.; Lin, J. Fast acquisition of heart rate in noncontact vital sign radar measurement using time-window-variation technique. IEEE Trans. Instrum. Meas. 2016, 1, 112–122. [Google Scholar] [CrossRef]
- Morgan, D.R.; Zierdtm, G. Novel signal processing techniques for Doppler radar cardiopulmonary sensing. Signal Process. 2009, 1, 45–66. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R. The empirical mode decomposition and the Hilbert spectrum for non-linear and non-stationary time series analysis. Proc. R. Soc. London 1998, 10, 903–995. [Google Scholar] [CrossRef]
- Mostafanezhad, I.; Boric-Lubecke, O.; Lubecke, V.; Mandic, D.P. Application of empirical mode decomposition in removing fidgeting interference in Doppler radar life signs monitoring devices. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 340–343. [Google Scholar]
- Ahrabian, A.; Looney, D.; Tobar, F.A.; Hallatt, J.; Mandic, D.P. Noise assisted multivariate empirical mode decomposition applied to Doppler radar data. In Proceedings of the Sensor Signal Processing for Defence (SSPD 2012), London, UK, 25–27 September 2012; pp. 1–4. [Google Scholar]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 5, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Dai, S.; Wu, S.; Chen, J.; Fang, G. Vital sign detection method based on multiple higher order cumulant for ultrawideband radar. IEEE Trans. Geosci. Remote Sens. 2012, 4, 1254–1265. [Google Scholar] [CrossRef]
- Gu, C.; Wang, G.; Inoue, T. Doppler radar vital sign detection with random body movement cancellation based on adaptive phase compensation. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (IMS), Seattle, WA, USA, 2–7 June 2013; pp. 2–7. [Google Scholar]
- Wang, J.; Wang, X.; Chen, L.; Huangfu, J. Noncontact distance and amplitude-independent vibration measurement based on an extended DACM algorithm. IEEE Trans. Instrum. Meas. 2014, 1, 145–153. [Google Scholar] [CrossRef]
- Liu, L.; Liu, S. Remote detection of human vital sign with stepped-frequency continuous wave radar. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 3, 775–782. [Google Scholar] [CrossRef]
- Ren, L.; Wang, H.; Naishadham, K.; Liu, Q.; Fathy, A.E. Noninvasive detection of cardiac and respiratory rates from stepped frequency continuous wave radar measurements using the state space method. In Proceedings of the 2015 IEEE MTT-S International Microwave Symposium (IMS), Phoenix, AZ, USA, 17–22 May 2015; pp. 1–4. [Google Scholar]
- Li, C.; Lubecke, V.M.; Boric-Lubecke, O.; Lin, J. A review on recent advances in Doppler radar sensors for noncontact healthcare monitoring. IEEE Trans. Microw. Theory Tech. 2013, 5, 2046–2060. [Google Scholar] [CrossRef]
- Tu, J.; Hwang, T.; Lin, J. Respiration rate measurement under 1-D body motion using single continuous-wave Doppler radar vital sign detection system. IEEE Trans. Microw. Theory Tech. 2016, 6, 1–10. [Google Scholar] [CrossRef]
- Ren, L.; Wang, H.; Naishadham, K. Phase-based methods for heart rate detection using UWB impulse Doppler radar. IEEE Trans. Microw. Theory Tech. 2016, 10, 3319–3330. [Google Scholar] [CrossRef]
- Kazemi, S.; Ghorbani, A.; Amindavar, H.; Li, C. Cyclostationary approach to Doppler radar heart and respiration rates monitoring with body motion cancellation using Radar Doppler System. Biomed. Signal Process. Control 2014, 11, 79–88. [Google Scholar] [CrossRef]
- Kazemi, S.; Ghorbani, A.; Amindavar, H. Cyclostationary modelling of amplitude and frequency modulated signals in heart and respiration monitoring Doppler radar systems. IET Radar Sonar Navig. 2015, 2, 116–124. [Google Scholar] [CrossRef]
- Droitcour, A.; Lubecke, O.B. Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for non-contact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 3, 838–848. [Google Scholar] [CrossRef]
- Renard, J.; Verlant-Chenet, J.; Dricot, J.; Doncker, P.; Horlin, F. Higher-order cyclostationarity detection for spectrum sensing. EURASIP J. Wirel. Commun. Netw. 2010, 3, 1–10. [Google Scholar] [CrossRef]
- Gardner, W.; Spooner, C. The cumulant theory of cyclostationary time-series, Part I: Foundation. IEEE Trans. Signal Process. 1994, 12, 3387–3408. [Google Scholar] [CrossRef]
- Lim, C.W.; Wakin, M.B. Compressive temporal higher order cyclostationary statistics. IEEE Trans. Signal Process. 2015, 11, 2942–2955. [Google Scholar] [CrossRef]
- Li, H.; Cheng, Q. Almost sure convergence analysis of mixed time averages and kth-order cyclic statistics. IEEE Trans. Inform. Theory 1997, 4, 1265–1268. [Google Scholar]
- Dandawate, A.V.; Giannakis, B.G. Statistical tests for presence of cyclostationarity. IEEE Trans. Signal Process. 1994, 9, 2355–2369. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
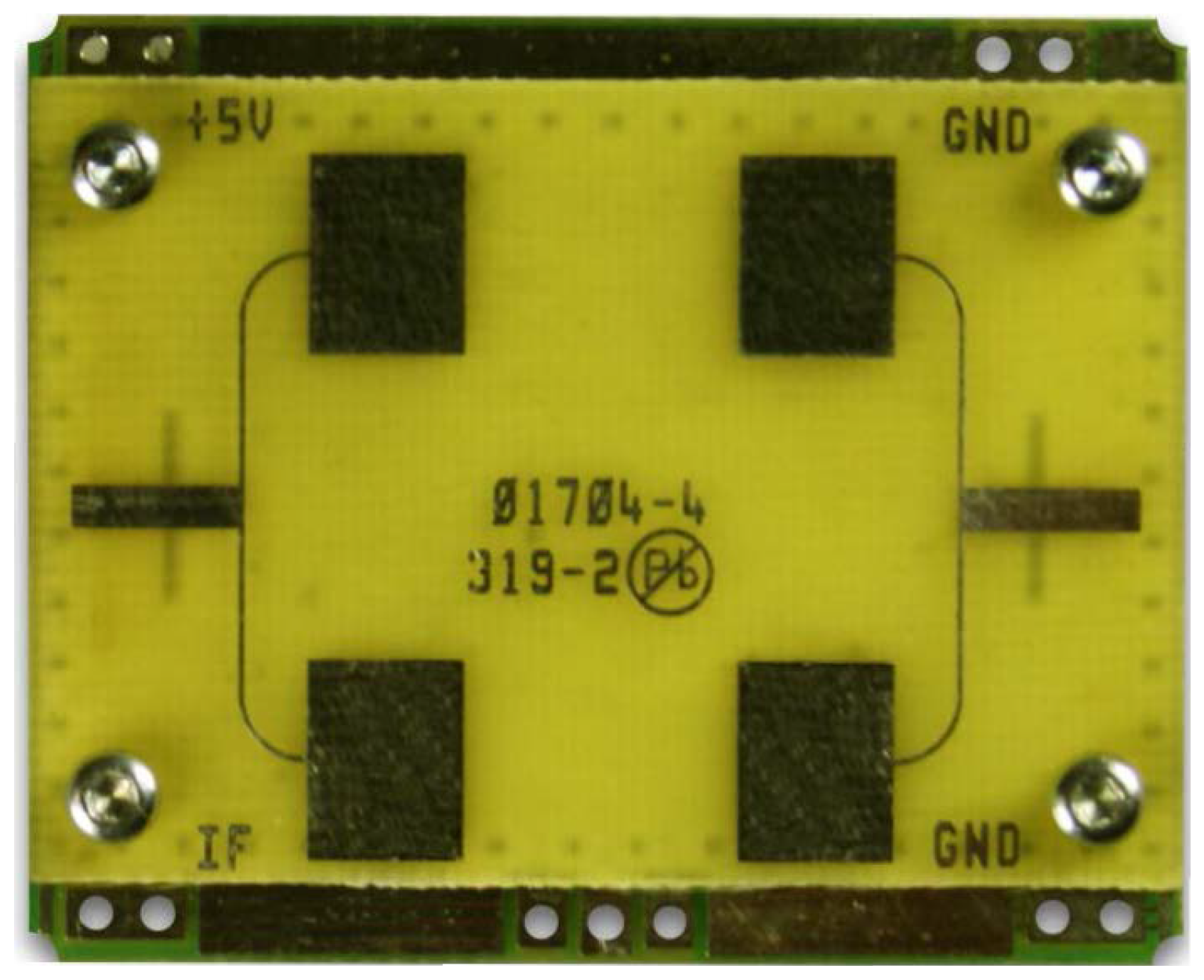
| Components | Frequency | Power Output | Operating Voltage | Sensitivity | Gain | Noise |
|---|---|---|---|---|---|---|
| Specifications | 10.587 GHz | 10 dBm | +5 V ± 0.25 V | −86 dBm | 8 dBi | <10 V |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Zhao, D.; Zhang, Z. Doppler Radar Vital Signs Detection Method Based on Higher Order Cyclostationary. Sensors 2018, 18, 47. https://doi.org/10.3390/s18010047
Yu Z, Zhao D, Zhang Z. Doppler Radar Vital Signs Detection Method Based on Higher Order Cyclostationary. Sensors. 2018; 18(1):47. https://doi.org/10.3390/s18010047
Chicago/Turabian StyleYu, Zhibin, Duo Zhao, and Zhiqiang Zhang. 2018. "Doppler Radar Vital Signs Detection Method Based on Higher Order Cyclostationary" Sensors 18, no. 1: 47. https://doi.org/10.3390/s18010047
APA StyleYu, Z., Zhao, D., & Zhang, Z. (2018). Doppler Radar Vital Signs Detection Method Based on Higher Order Cyclostationary. Sensors, 18(1), 47. https://doi.org/10.3390/s18010047