Calibrating the Severity of Forest Defoliation by Pine Processionary Moth with Landsat and UAV Imagery


Abstract
:1. Introduction
2. Materials and Methods
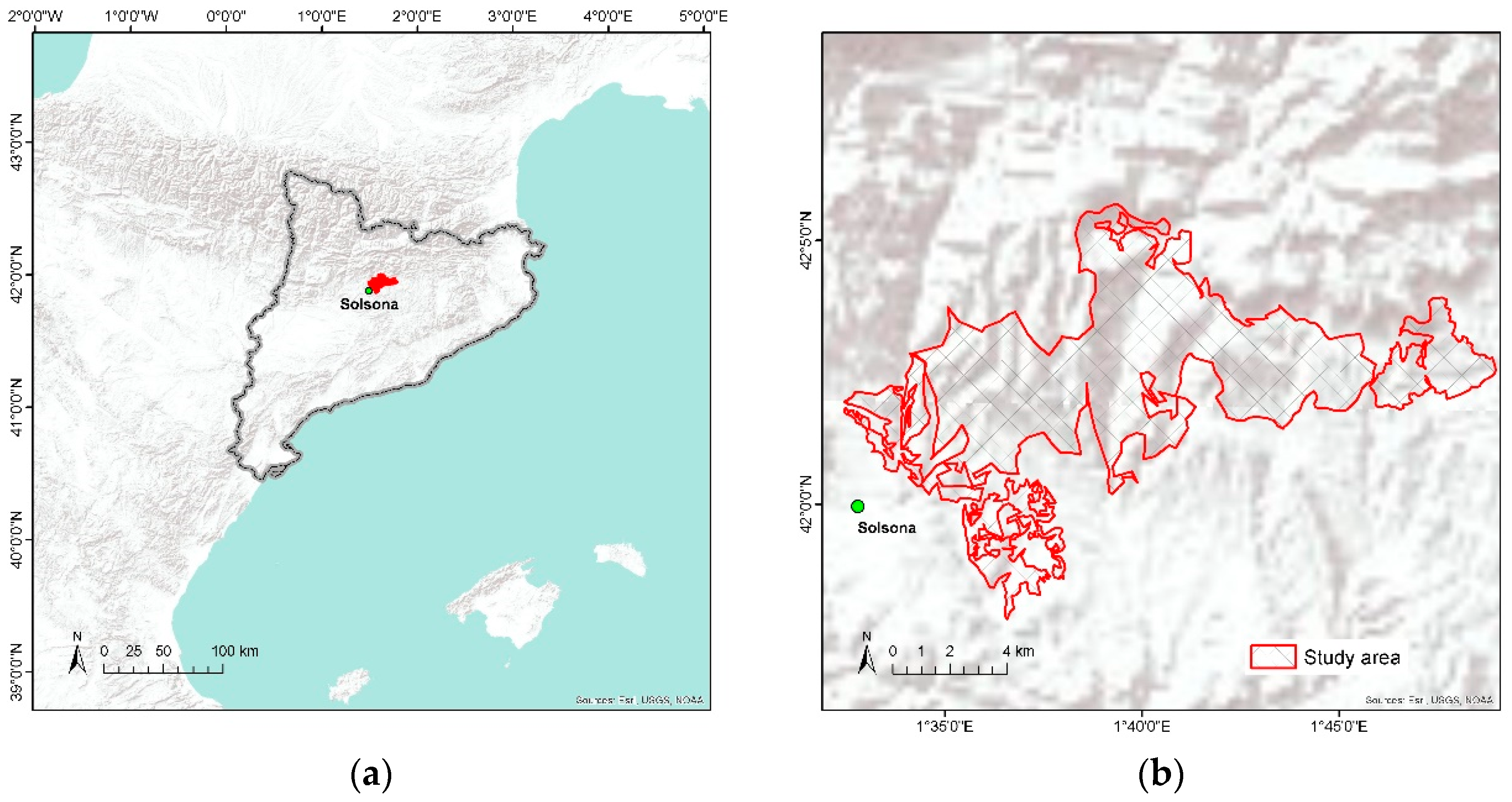
2.1. Study Area
2.2. Field Data
2.3. Landsat Images and Vegetation Indices
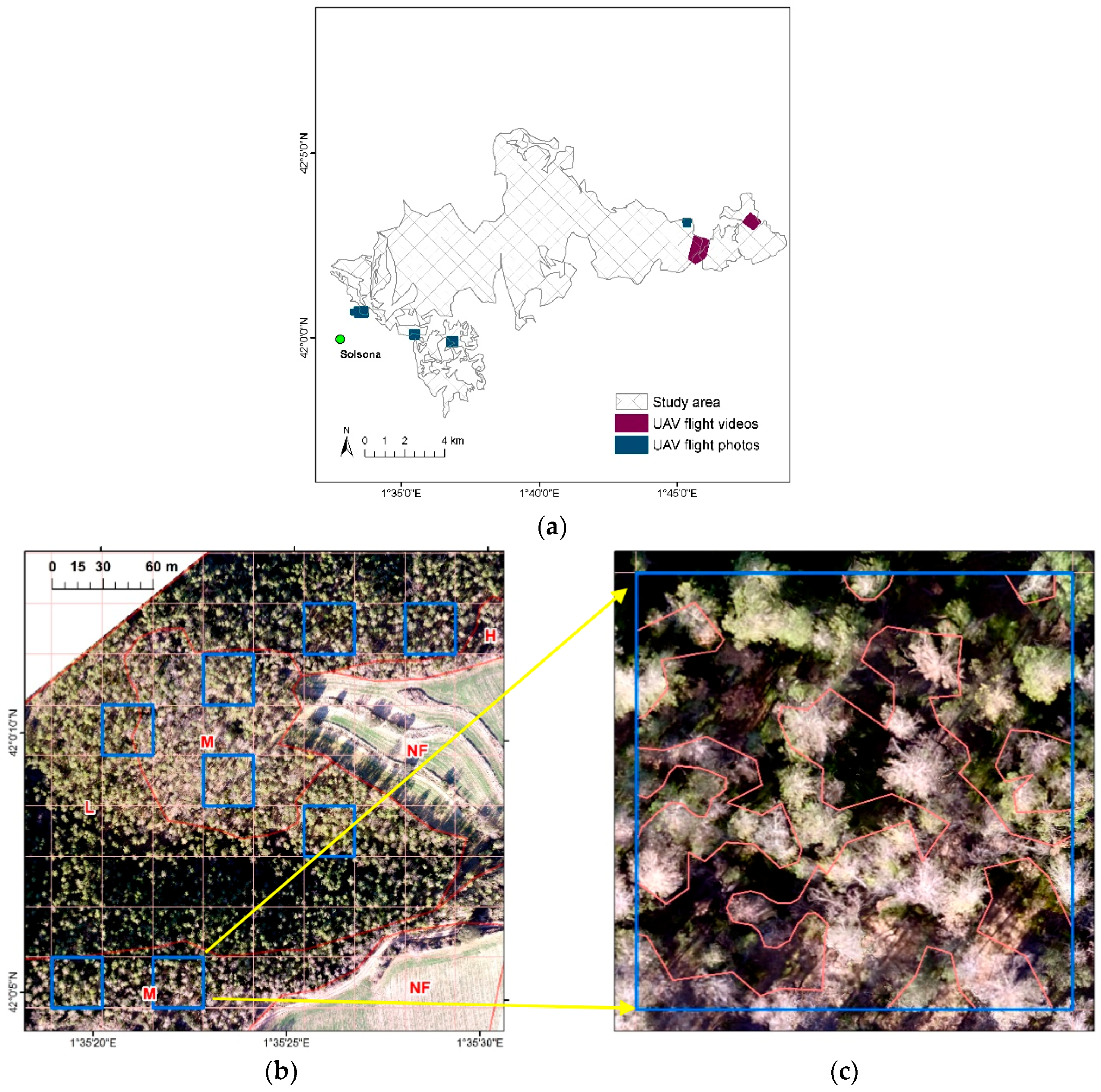
2.4. Visual Interpretation with UAV Images
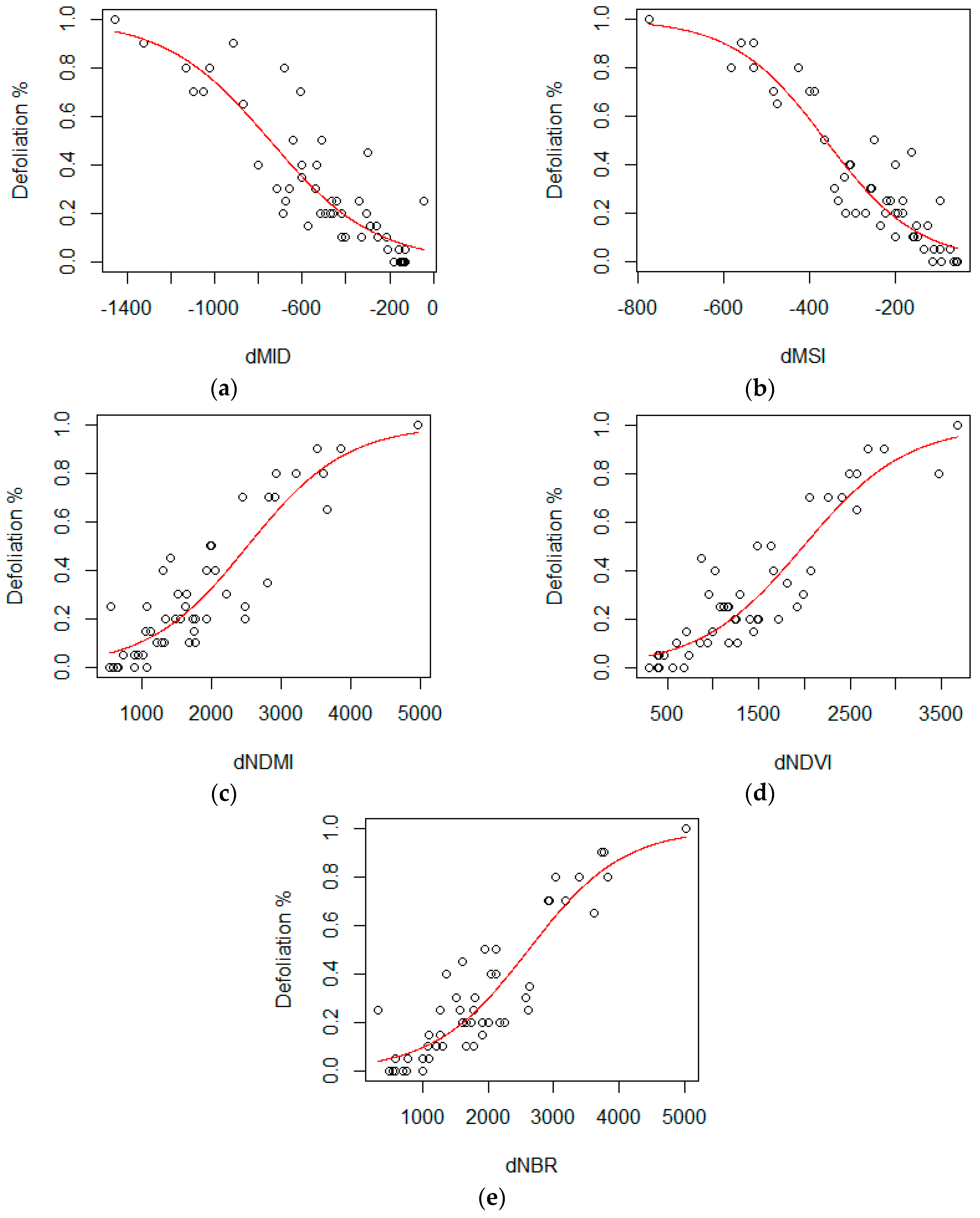
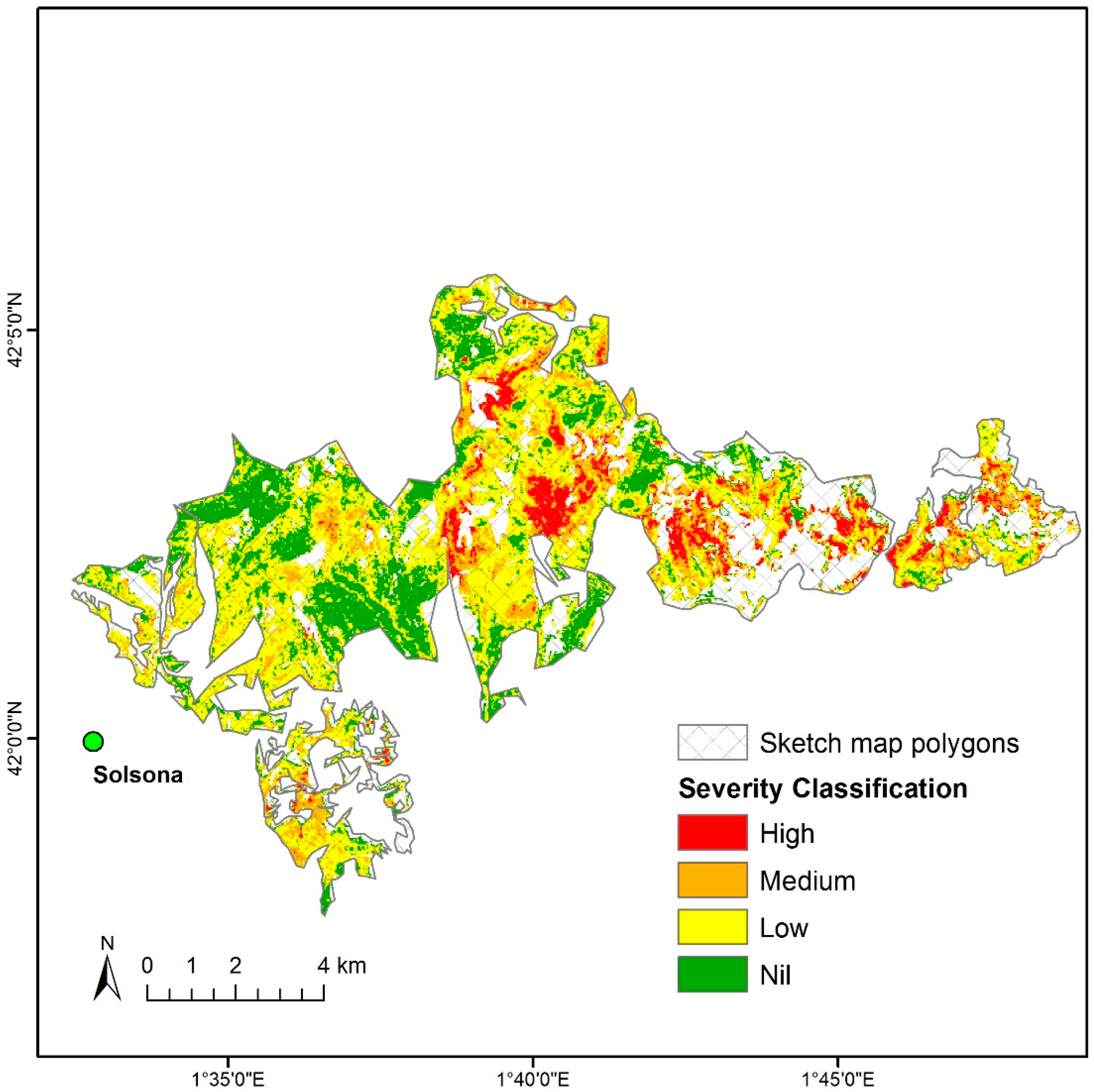
2.5. Regression Analysis and Threshold Classification
2.6. Classification Accuracy
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rullan-Silva, C.D.; Olthoff, A.E.; Delgado de la Mata, J.A.; Pajares-Alonso, J.A. Remote Monitoring of Forest Insect Defoliation—A Review. For. Syst. 2013, 22, 377. [Google Scholar] [CrossRef]
- Sangüesa-Barreda, G.; Camarero, J.J.; García-Martín, A.; Hernández, R.; De la Riva, J. Remote-Sensing and Tree-Ring Based Characterization of Forest Defoliation and Growth Loss Due to the Mediterranean Pine Processionary Moth. For. Ecol. Manag. 2014, 320, 171–181. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Casassa, G.; Karoly, D.J.; Imeson, A.; Liu, C.; Menzel, A.; Rawlins, S.; Root, T.L.; Seguin, B.; Tryjanowski, P. Assessment of Observed Changes and Responses in Natural and Managed Systems. In Climate Change 2007: Impacts, Adaptation and Vulnerability. Contribution of Working Group II to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Parry, M.L., Canziani, O.F., Palutikof, J.P., van der Linden, P.J., Hanson, C.E., Eds.; Cambridge University Press: Cambridge, UK, 2007; pp. 79–131. [Google Scholar]
- Battisti, A.; Stastny, M.; Netherer, S.; Robinet, C.; Schopf, A.; Roques, A.; Larsson, S. Expansion of Geographic Range in the Pine Processionary Moth Caused by Increased Winter Temperatures. Ecol. Appl. 2005, 15, 2084–2096. [Google Scholar] [CrossRef]
- Roques, A. Processionary Moths and Climate Change: An Update; Springer: Cham, The Netherlands, 2015. [Google Scholar]
- Hódar, J.A.; Zamora, R. Herbivory and Climatic Warming: A Mediterranean Outbreaking Caterpillar Attacks a Relict, Boreal Pine Species. Biodivers. Conserv. 2004, 13, 493–500. [Google Scholar] [CrossRef]
- Robinet, C.; Baier, P.; Pennerstorfer, J.; Schopf, A.; Roques, A. Modelling the Effects of Climate Change on the Potential Feeding Activity of Thaumetopoea Pityocampa (Den. & Schiff.) (Lep., Notodontidae) in France. Glob. Ecol. Biogeogr. 2007, 16, 460–471. [Google Scholar]
- De Beurs, K.M.; Townsend, P.A. Estimating the Effect of Gypsy Moth Defoliation Using MODIS. Remote Sens. Environ. 2008, 112, 3983–3990. [Google Scholar] [CrossRef]
- Hódar, J.A.; Castro, J.; Zamora, R. Pine Processionary Caterpillar Thaumetopoea Pityocampa as a New Threat for Relict Mediterranean Scots Pine Forests under Climatic Warming. Biol. Conserv. 2003, 110, 123–129. [Google Scholar] [CrossRef]
- Hyvonen, R.; Agren, G.I.; Linder, S.; Persson, T.; Cotrufo, M.F.; Ekblad, A.; Freeman, M.; Grelle, A.; Janssens, I.A.; Jarvis, P.G.; et al. The Likely Impact of Elevated [CO2], Nitrogen Deposition, Increased Temperature and Management on Carbon Sequestration in Temperate and Boreal Forest Ecosystems: A Literature Review. New Phytol. 2007, 173, 463–480. [Google Scholar] [CrossRef] [PubMed]
- Luyssaert, S.; Ciais, P.; Piao, S.L.; Schulze, E.D.; Jung, M.; Zaehle, S.; Schelhaas, M.J.; Reichstein, M.; Churkina, G.; Papale, D.; et al. The European Carbon Balance. Part 3: Forests. Glob. Chang. Biol. 2010, 16, 1429–1450. [Google Scholar] [CrossRef]
- Li, S.; Daudin, J.J.; Piou, D.; Robinet, C.; Jactel, H. Periodicity and Synchrony of Pine Processionary Moth Outbreaks in France. For. Ecol. Manag. 2015, 354, 309–317. [Google Scholar] [CrossRef]
- NASA. Landsat 8 Bands. Available online: https://landsat.gsfc.nasa.gov/landsat-8/landsat-8-bands/ (accessed on 16 July 2018).
- ESA. Sentinel-2 MSI. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/instrument-payload/resolution-and-swath (accessed on 16 July 2018).
- DigitalGlobe. WorldView-4. Available online: http://worldview4.digitalglobe.com/#/main (accessed on 16 July 2018).
- Cabello, A.; Frieyro, J.E.; Granado, L.; Hayas, A.; Méndez, E.; Montoya, G.; Pino, I. Estudio de Afecciones Por Plagas y Decaimiento Forestal En Masas de Coníferas Mediante Imágenes Procedentes de Sensores Hiperespectrales. In Proceedings of the XIV Congreso de la Asociación Española de Teledetección (AET), Mieres, Spain, 21–23 September 2011; pp. 2–5. [Google Scholar]
- Roncat, A.; Morsdorf, F.; Briese, C.; Wagner, W.; Pfeifer, N. Laser Pulse Interaction with Forest Canopy: Geometric and Radiometric Issues. In Forestry Applications of Airborne Laser Scanning; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Kantola, T.; Vastaranta, M.; Lyytikäinen-Saarenmaa, P.; Holopainen, M.; Kankare, V.; Talvitie, M.; Hyyppä, J. Classification of Needle Loss of Individual Scots Pine Trees by Means of Airborne Laser Scanning. Forests 2013, 4, 386–403. [Google Scholar] [CrossRef] [Green Version]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing Very High Resolution UAV Imagery for Monitoring Forest Health during a Simulated Disease Outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Filippo, S.; Gennaro, D.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; et al. International Journal of Remote Sensing Forestry Applications of UAVs in Europe: A Review Forestry Applications of UAVs in Europe: A Review. Int. J. Remote Sens. 2017, 38, 8–10. [Google Scholar] [CrossRef]
- Lehmann, J.R.K.; Nieberding, F.; Prinz, T.; Knoth, C. Analysis of Unmanned Aerial System-Based CIR Images in Forestry-a New Perspective to Monitor Pest Infestation Levels. Forests 2015, 6, 594–612. [Google Scholar] [CrossRef] [Green Version]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned Aerial Vehicles (UAV) for Assessment of Qualitative Classification of Norway Spruce in Temperate Forest Stands. Geo-Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Cardil, A.; Vepakomma, U.; Brotons, L. Assessing Pine Processionary Moth Defoliation Using Unmanned Aerial Systems. Forests 2017, 8, 402. [Google Scholar] [CrossRef]
- Hentz, A.M.K.; Strager, M.P. Cicada Damage Detection Based on UAV Spectral and 3D Data. Silvilaser 2017 2017, 10, 95–96. [Google Scholar]
- Pla, M.; Duane, A.; Brotons, L. Potencial de Las Imágenes UAV Como Datos de Verdad Terreno Para La Clasificación de La Severidad de Quema de Imágenes Landsat: Aproximaciones a Un Producto Útil Para La Gestión Post Incendio. Rev. Teledetec. 2017, 2017, 91–102. [Google Scholar] [CrossRef]
- Hantson, S.; Chuvieco, E. Evaluation of Different Topographic Correction Methods for Landsat Imagery. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 691–700. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E.F. Change Detection Techniques. Int. J. Remote Sens. 2004, 25, 2365–2407. [Google Scholar] [CrossRef]
- Rock, B.N.; Vogelmann, J.E.; Williams, D.L.; Vogelmann, A.F.; Hoshizaki, T. Remote Detection of Forest DamagePlant Responses to Stress May Have Spectral “Signatures” That Could Be Used to Map, Monitor, and Measure Forest Damage. Bioscience 1986, 36, 439–445. [Google Scholar] [CrossRef]
- Hunt, E.R., Jr.; Rock, B.N. Detection of Changes in Leaf Water Content Using Near- and Middle-Infrared Reflectances. Remote Sens. Environ. 1989, 30, 43–54. [Google Scholar]
- Rouse, J.W.; Hass, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. Third Earth Resour. Technol. Satell. Symp. 1973, 1, 309–317. [Google Scholar]
- García, M.J.L.; Caselles, V. Mapping Burns and Natural Reforestation Using Thematic Mapper Data. Geocarto Int. 1991, 6, 31–37. [Google Scholar] [CrossRef]
- DJI. Phantom 2 Vision+. 2014, pp. 1–71. Available online: https://www.dji.com/cn/phantom-2-vision-plus (accessed on 31 July 2018).
- Agisoft LLC. Agisoft PhotoScan User Manual; Prof. Ed. Version 1.2; Agisoft LLC: St. Petersburg, Russia, 2016; p. 37. [Google Scholar]
- Hall, R.J.; Castilla, G.; White, J.C.; Cooke, B.J.; Skakun, R.S. Remote Sensing of Forest Pest Damage: A Review and Lessons Learned from a Canadian Perspective. Can. Entomol. 2016, 148, S296–S396. [Google Scholar] [CrossRef]
- Townsend, P.A.; Singh, A.; Foster, J.R.; Rehberg, N.J.; Kingdon, C.C.; Eshleman, K.N.; Seagle, S.W. A General Landsat Model to Predict Canopy Defoliation in Broadleaf Deciduous Forests. Remote Sens. Environ. 2012, 119, 255–265. [Google Scholar] [CrossRef]
- Rullán-Silva, C.; Olthoff, A.E.; Pando, V.; Pajares, J.A.; Delgado, J.A. Remote Monitoring of Defoliation by the Beech Leaf-Mining Weevil Rhynchaenus Fagi in Northern Spain. For. Ecol. Manag. 2015, 347, 200–208. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, X.; Zhang, N.; Hassan, M.A.; Zhao, L. Assessing the Defoliation of Pine Forests in a Long Time-Series and Spatiotemporal Prediction of the Defoliation Using Landsat Data. Remote Sens. 2018, 10, 360. [Google Scholar] [CrossRef]
- McFadden, D. Conditional Logit Analysis of Qualitative Choice Behavior. In Frontiers Econometrics; Zarembka, P., Ed.; Academic Press: New York, NY, USA, 1973; pp. 105–142. [Google Scholar]
- Allison, P.D. Measures of Fit for Logistic Regression. In Proceedings of the SAS Global Forum, Washington, DC, USA, 23–26 March 2014; Volume 2, pp. 1–12. [Google Scholar]
- Miller, J.D.; Thode, A.E. Quantifying Burn Severity in a Heterogeneous Landscape with a Relative Version of the Delta Normalized Burn Ratio (DNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Parks, S.A.; Dillon, G.K.; Miller, C. A New Metric for Quantifying Burn Severity: The Relativized Burn Ratio. Remote Sens. 2014, 6, 1827–1844. [Google Scholar] [CrossRef] [Green Version]
- Vogelmann, J.E.; Tolk, B.; Zhu, Z. Monitoring Forest Changes in the Southwestern United States Using Multitemporal Landsat Data. Remote Sens. Environ. 2009, 113, 1739–1748. [Google Scholar] [CrossRef]
- Vogelmann, J.E. Comparison between Two Vegetation Indices for Measuring Different Types of Forest Damage in the North-Eastern United States. Int. J. Remote Sens. 1990, 11, 2281–2297. [Google Scholar] [CrossRef]
- Senf, C.; Pflugmacher, D.; Wulder, M.A.; Hostert, P. Characterizing Spectral-Temporal Patterns of Defoliator and Bark Beetle Disturbances Using Landsat Time Series. Remote Sens. Environ. 2015, 170, 166–177. [Google Scholar] [CrossRef]
- Noi, P.T.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2017, 18, 18. [Google Scholar] [CrossRef]
- Garcia-Ruiz, F.; Sankaran, S.; Maja, J.M.; Lee, W.S.; Rasmussen, J.; Ehsani, R. Comparison of Two Aerial Imaging Platforms for Identification of Huanglongbing-Infected Citrus Trees. Comput. Electron. Agric. 2013, 91, 106–115. [Google Scholar] [CrossRef]
- Gini, R.; Passoni, D.; Pinto, L.; Sona, G. Use of Unmanned Aerial Systems for Multispectral Survey and Tree Classification: A Test in a Park Area of Northern Italy. Eur. J. Remote Sens. 2014, 47, 251–269. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of Riparian Forest Species and Health Condition Using Multi-Temporal and Hyperspatial Imagery from Unmanned Aerial System. Environ. Monit. Assess. 2016, 188, 1–19. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Acronym | Formula | Reference |
|---|---|---|---|
| Middle Infrared Wavelengths | MID | Band 6 + Band 7 | [28] |
| Moisture Stress Index | MSI | [29] | |
| Normalized Difference Moisture Index | NDMI | [30] | |
| Normalized Difference Vegetation Index | NDVI | [31] | |
| Normalized Burn Ratio | NBR | [32] |
| Severity | Defoliation (%) | Number of Samples |
|---|---|---|
| Nil | 0–5 | 10 |
| Low | 10–30 | 23 |
| Medium | 35–65 | 8 |
| High | 70–100 | 9 |
| Index | Equation | R2 (McFadden’s) |
|---|---|---|
| dMID | 0.740 | |
| dMSI | 0.815 | |
| dNDMI | 0.749 | |
| dNDVI | 0.787 | |
| dNBR | 0.776 |
| Index | Defoliation (%) | ||
|---|---|---|---|
| 10 | 35 | 70 | |
| dMID | −222 | −599 | −949 |
| dMSI | −125 | −295 | −453 |
| dNDMI | 963 | 2081 | 3121 |
| dNDVI | 743 | 1636 | 2466 |
| dNBR | 1034 | 2172 | 3229 |
| Class | Predicted (Landsat 8) | ||||||
|---|---|---|---|---|---|---|---|
| Nil | Low | Medium | High | Total | Producer’s Accuracy | ||
| Observed (UAV) | Nil | 9 | 1 | 0 | 0 | 10 | 0.90 |
| Low | 2 | 17 | 4 | 0 | 23 | 0.74 | |
| Medium | 0 | 3 | 4 | 1 | 8 | 0.50 | |
| High | 0 | 0 | 3 | 6 | 9 | 0.67 | |
| Total | 11 | 21 | 11 | 7 | 50 | ||
| User’s Accuracy | 0.82 | 0.81 | 0.36 | 0.86 | 0.72 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Otsu, K.; Pla, M.; Vayreda, J.; Brotons, L. Calibrating the Severity of Forest Defoliation by Pine Processionary Moth with Landsat and UAV Imagery. Sensors 2018, 18, 3278. https://doi.org/10.3390/s18103278
Otsu K, Pla M, Vayreda J, Brotons L. Calibrating the Severity of Forest Defoliation by Pine Processionary Moth with Landsat and UAV Imagery. Sensors. 2018; 18(10):3278. https://doi.org/10.3390/s18103278
Chicago/Turabian StyleOtsu, Kaori, Magda Pla, Jordi Vayreda, and Lluís Brotons. 2018. "Calibrating the Severity of Forest Defoliation by Pine Processionary Moth with Landsat and UAV Imagery" Sensors 18, no. 10: 3278. https://doi.org/10.3390/s18103278
APA StyleOtsu, K., Pla, M., Vayreda, J., & Brotons, L. (2018). Calibrating the Severity of Forest Defoliation by Pine Processionary Moth with Landsat and UAV Imagery. Sensors, 18(10), 3278. https://doi.org/10.3390/s18103278