A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors

Abstract
:1. Introduction
2. Materials and Methods
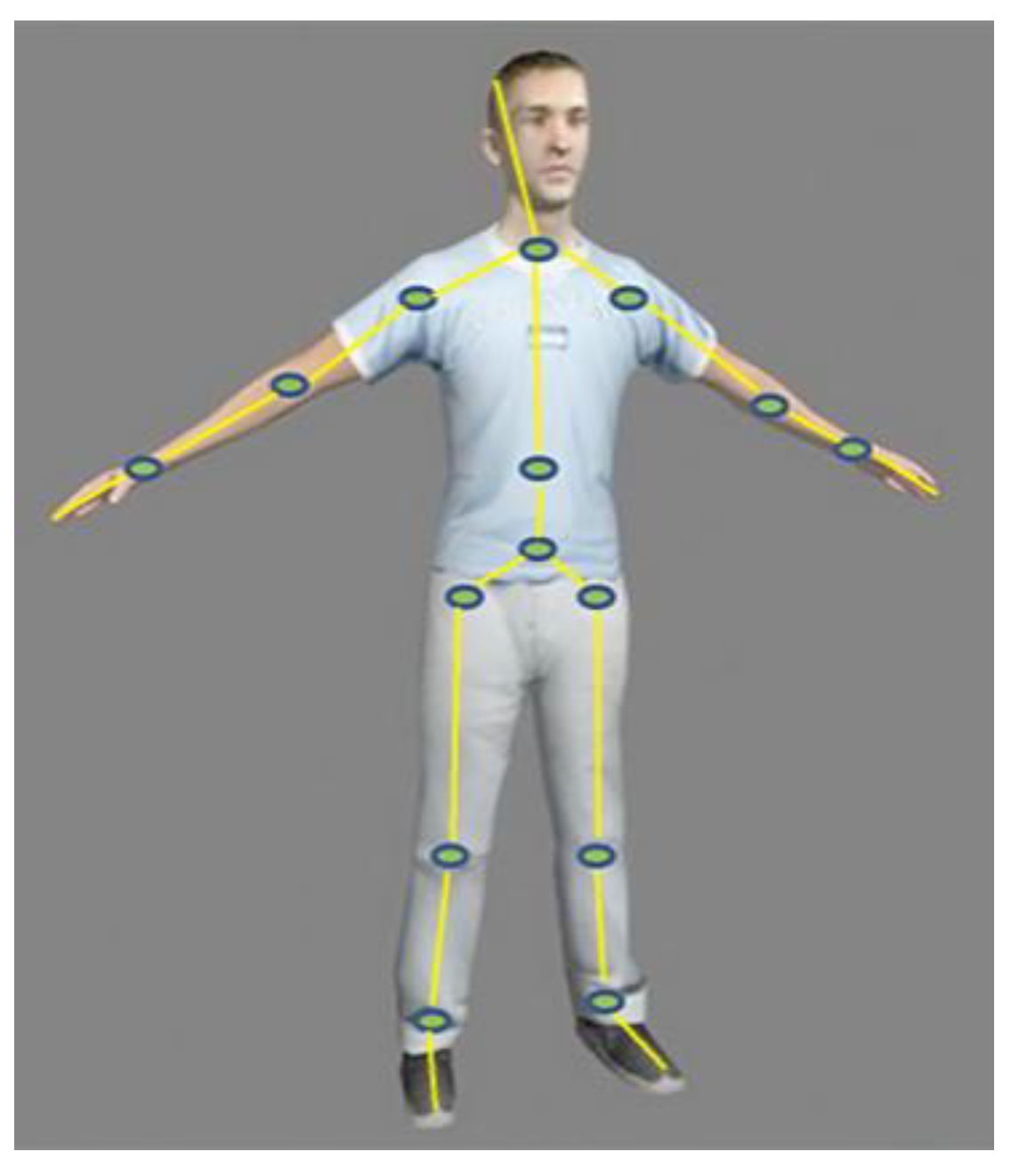
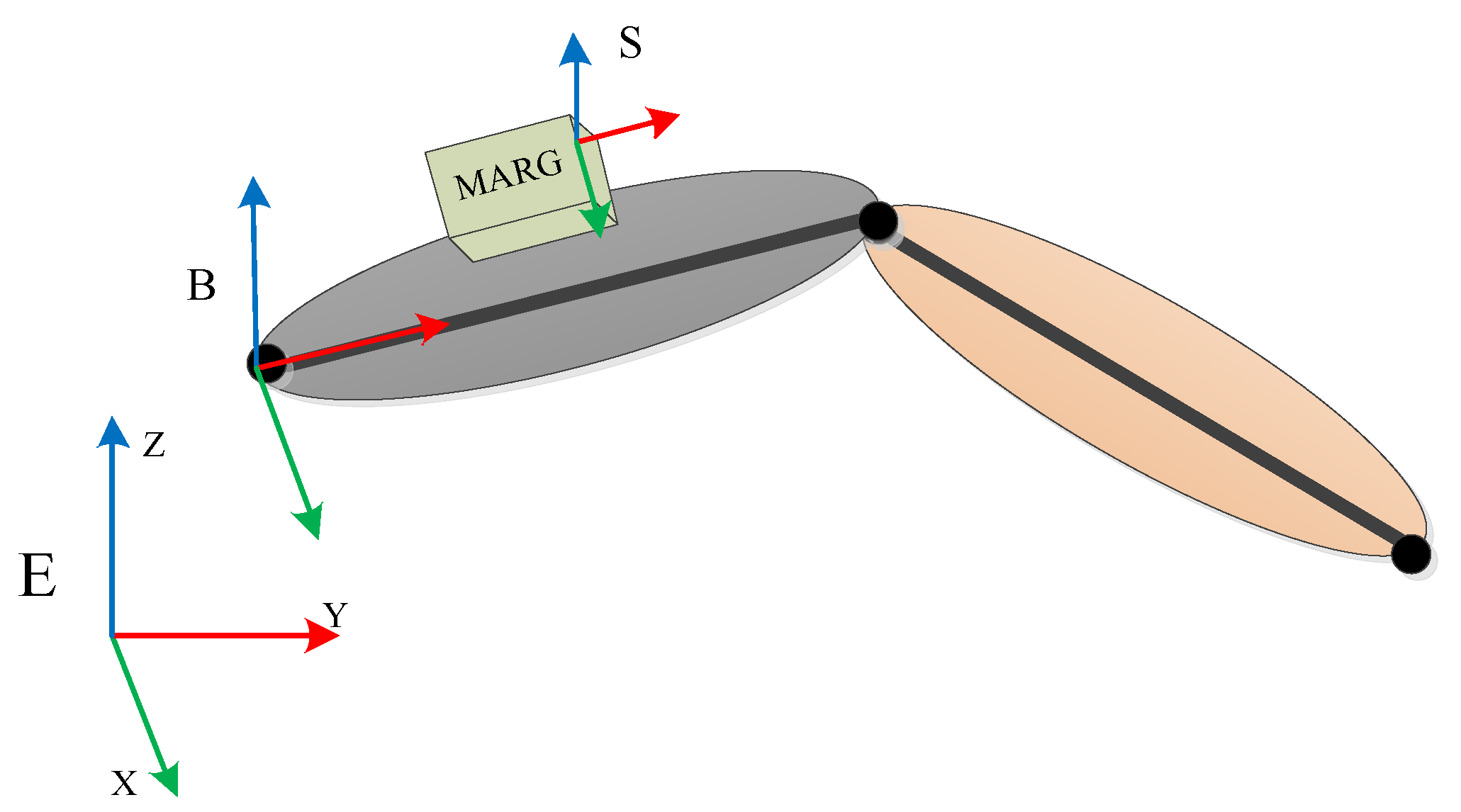
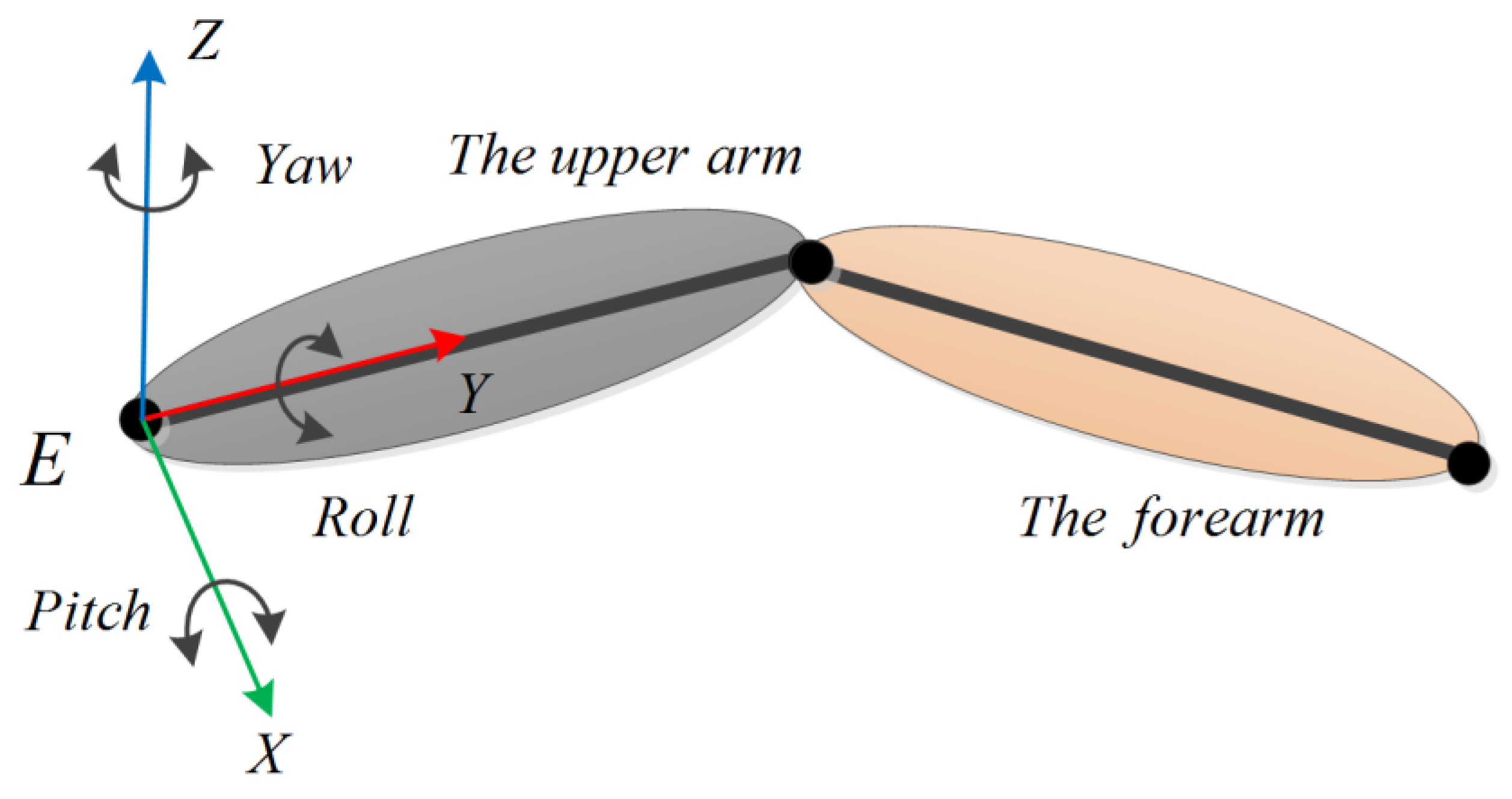
2.1. Coordinate System Definition
2.2. Representation
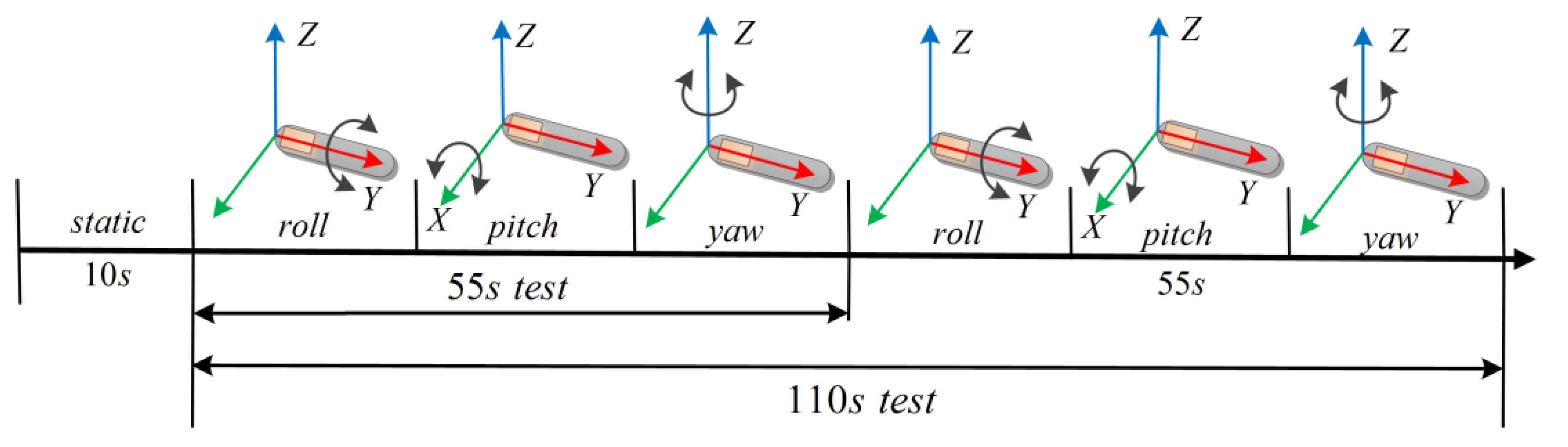
2.3. Motion Speed
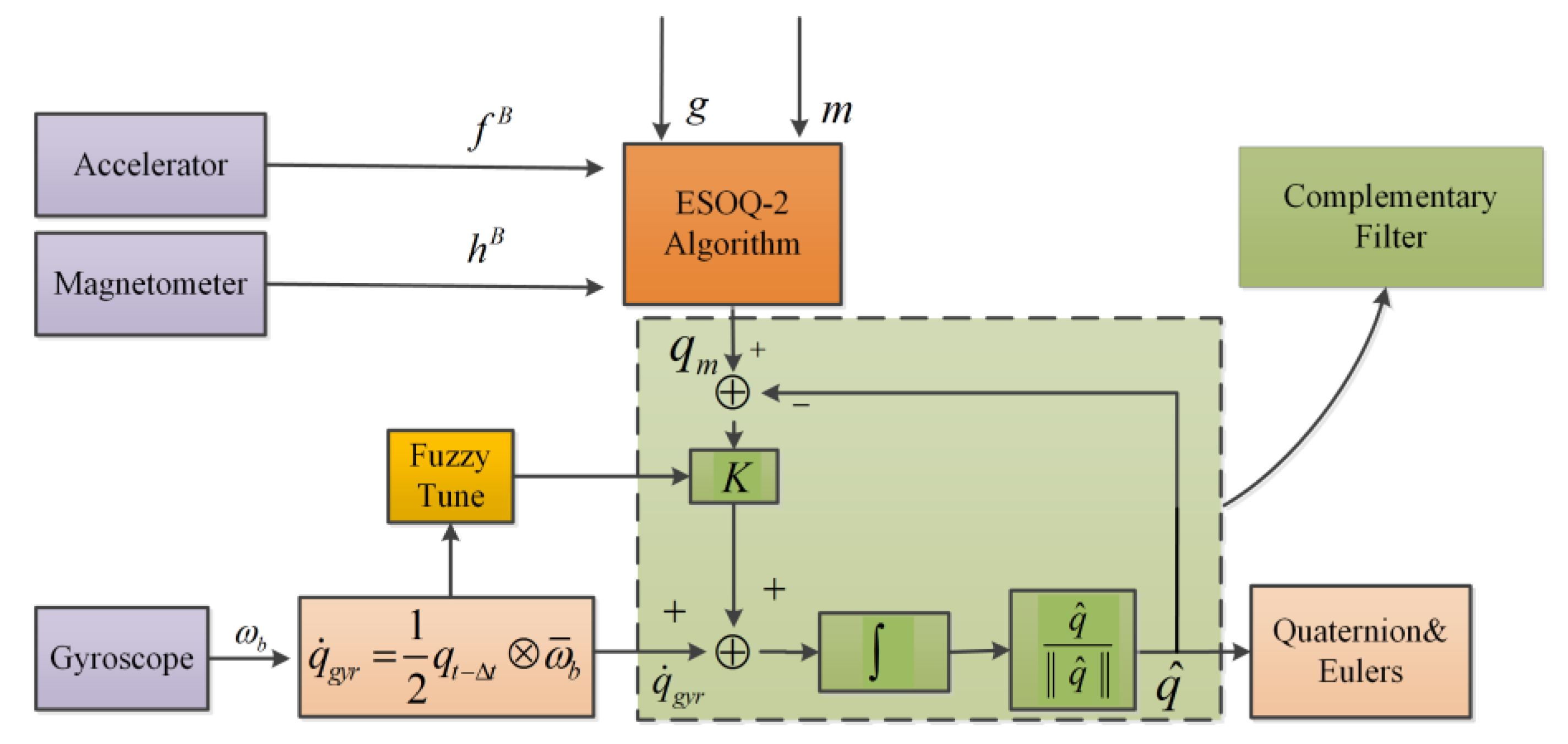
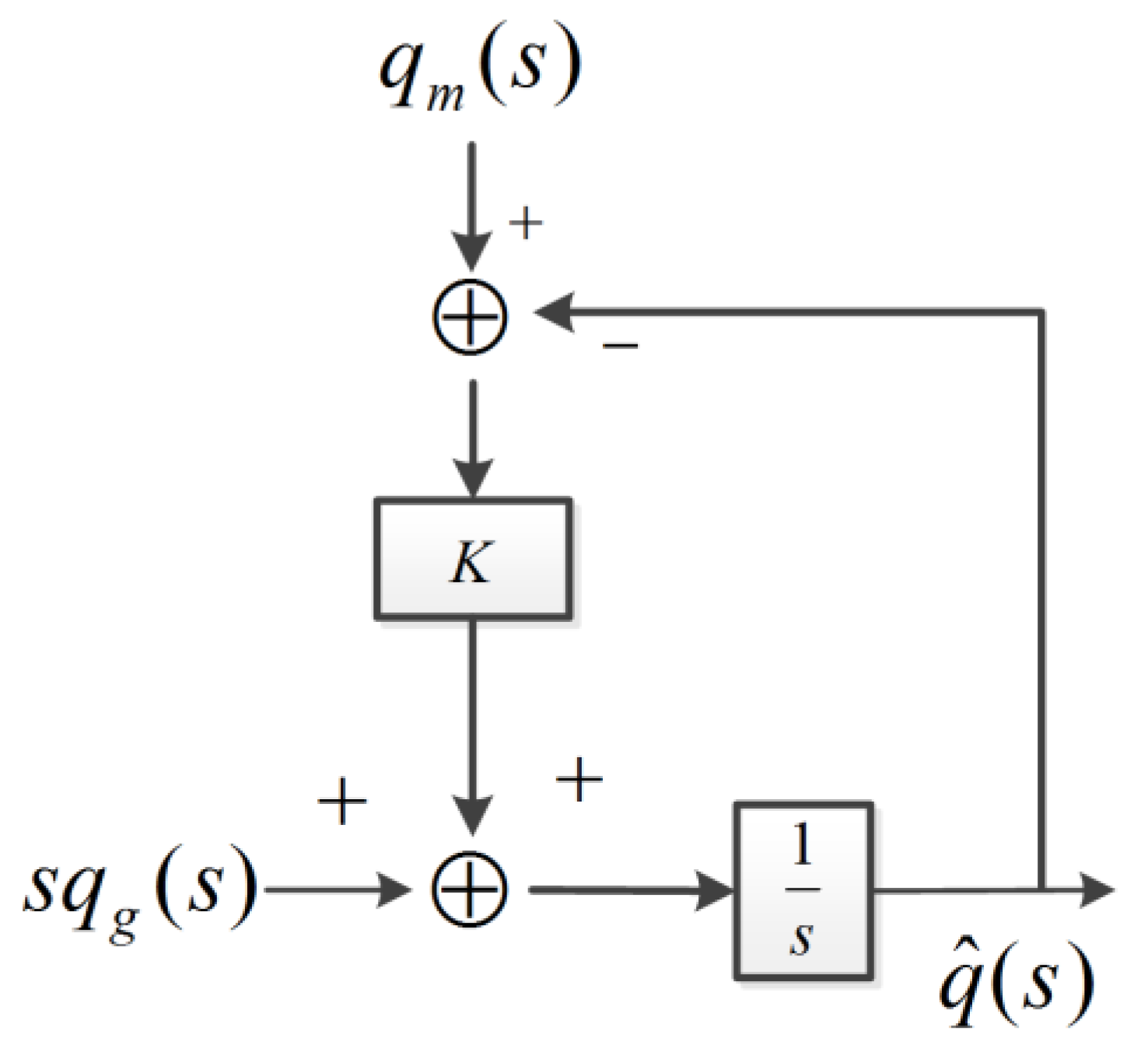
2.4. Description of the Proposed Algorithm
2.5. The ESOQ-2 Algorithm and Computation for the Accelerator
2.5.1. The ESOQ-2 Algorithm and Reference Quaternion
2.5.2. Compensation for the Accelerator
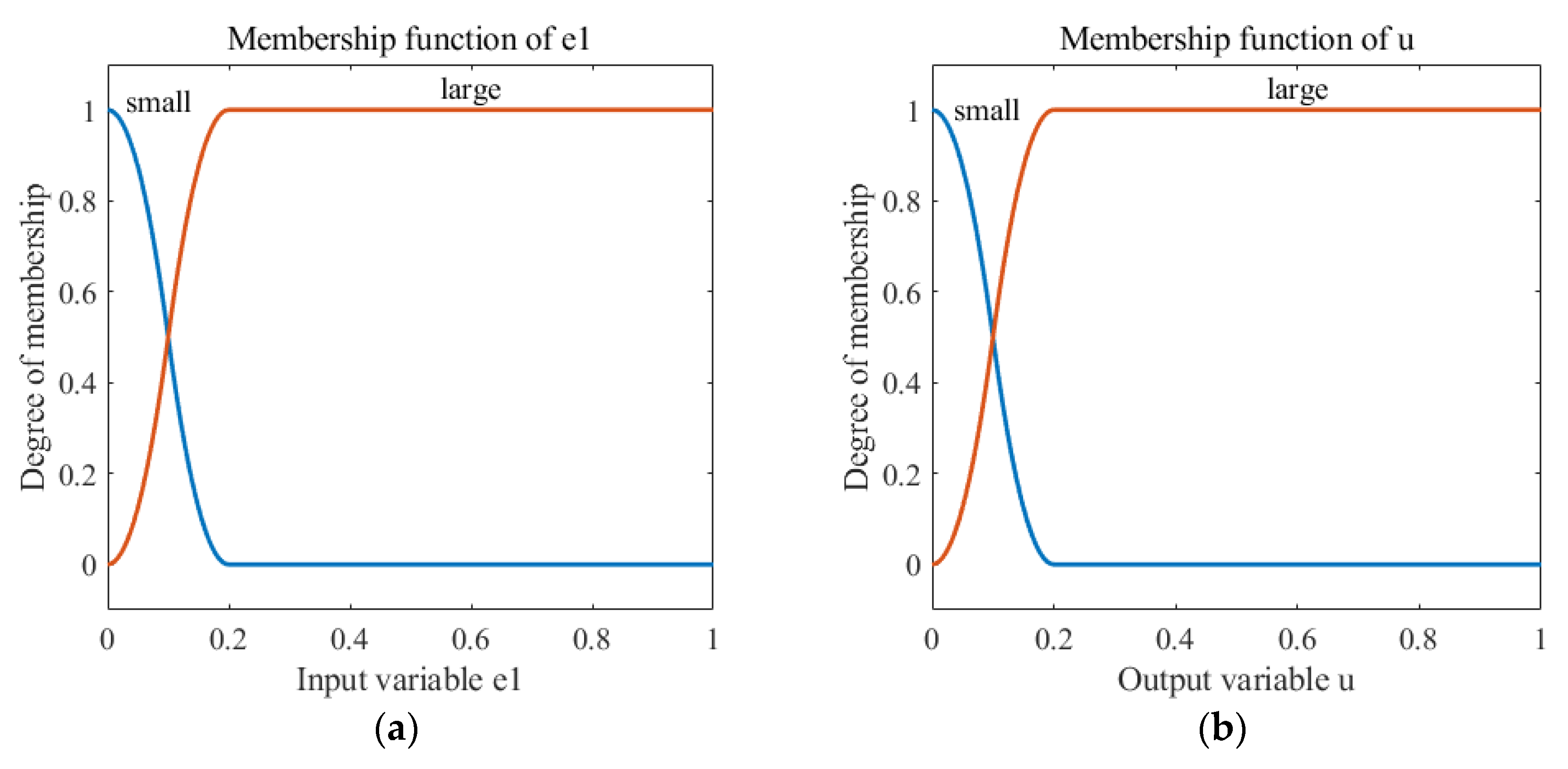
2.6. Quaternion Fusion Factor
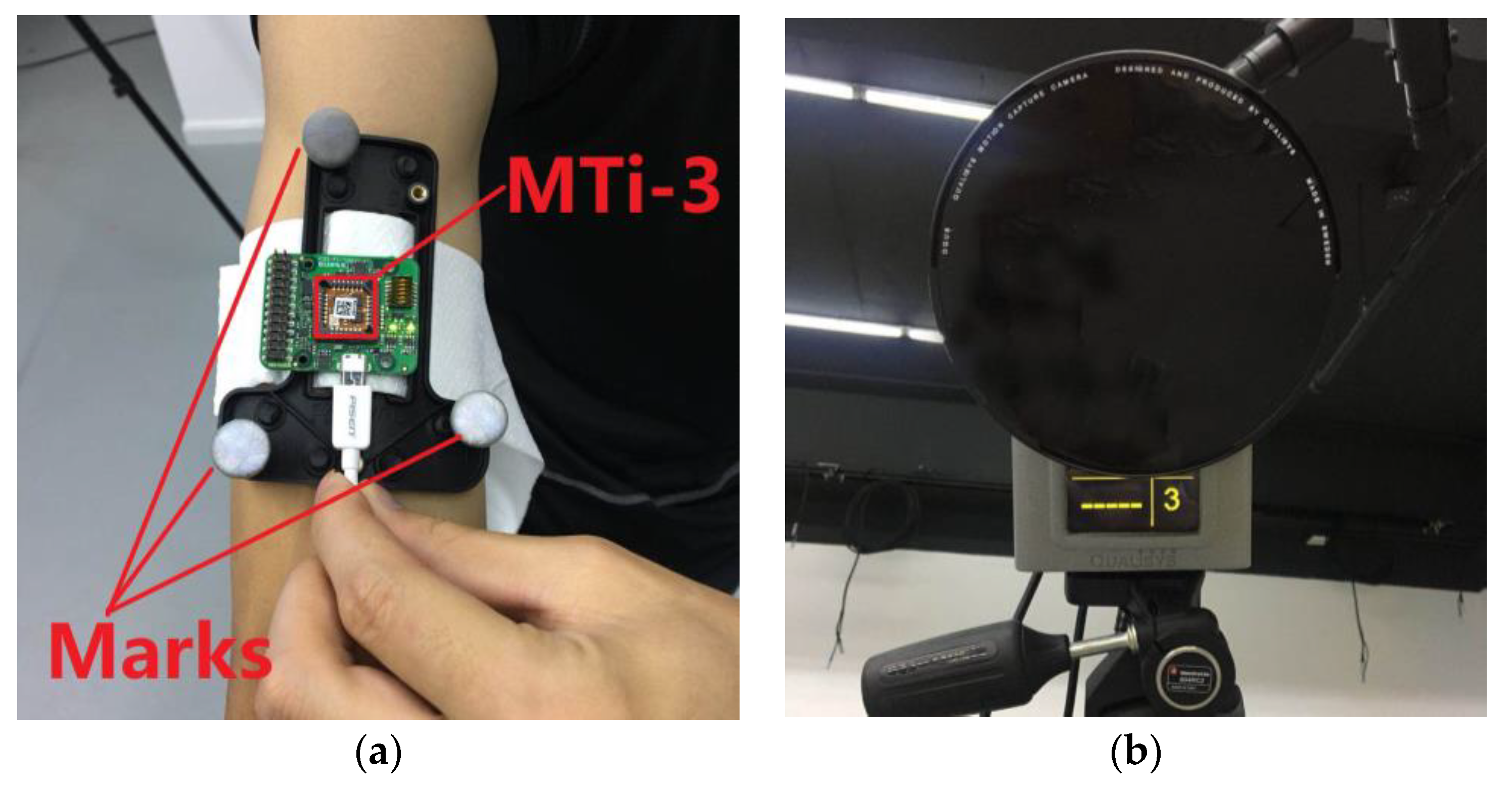
3. Experimental Results and Discussion
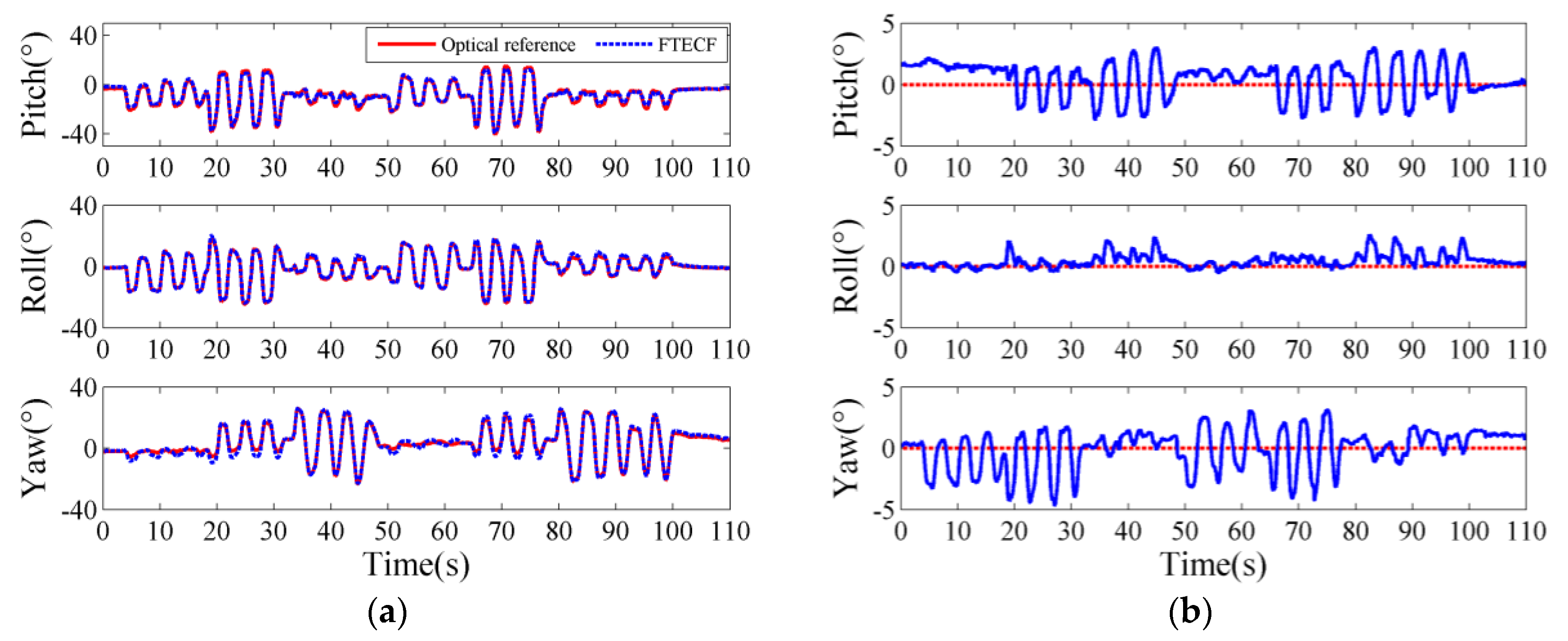
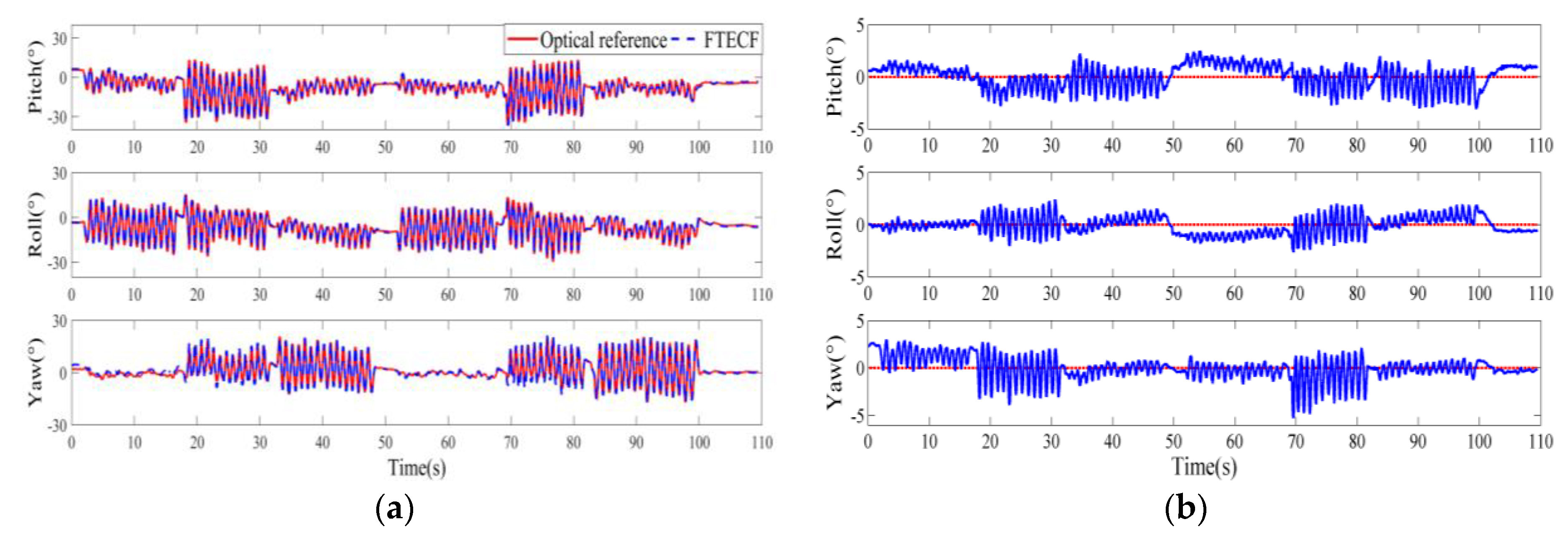
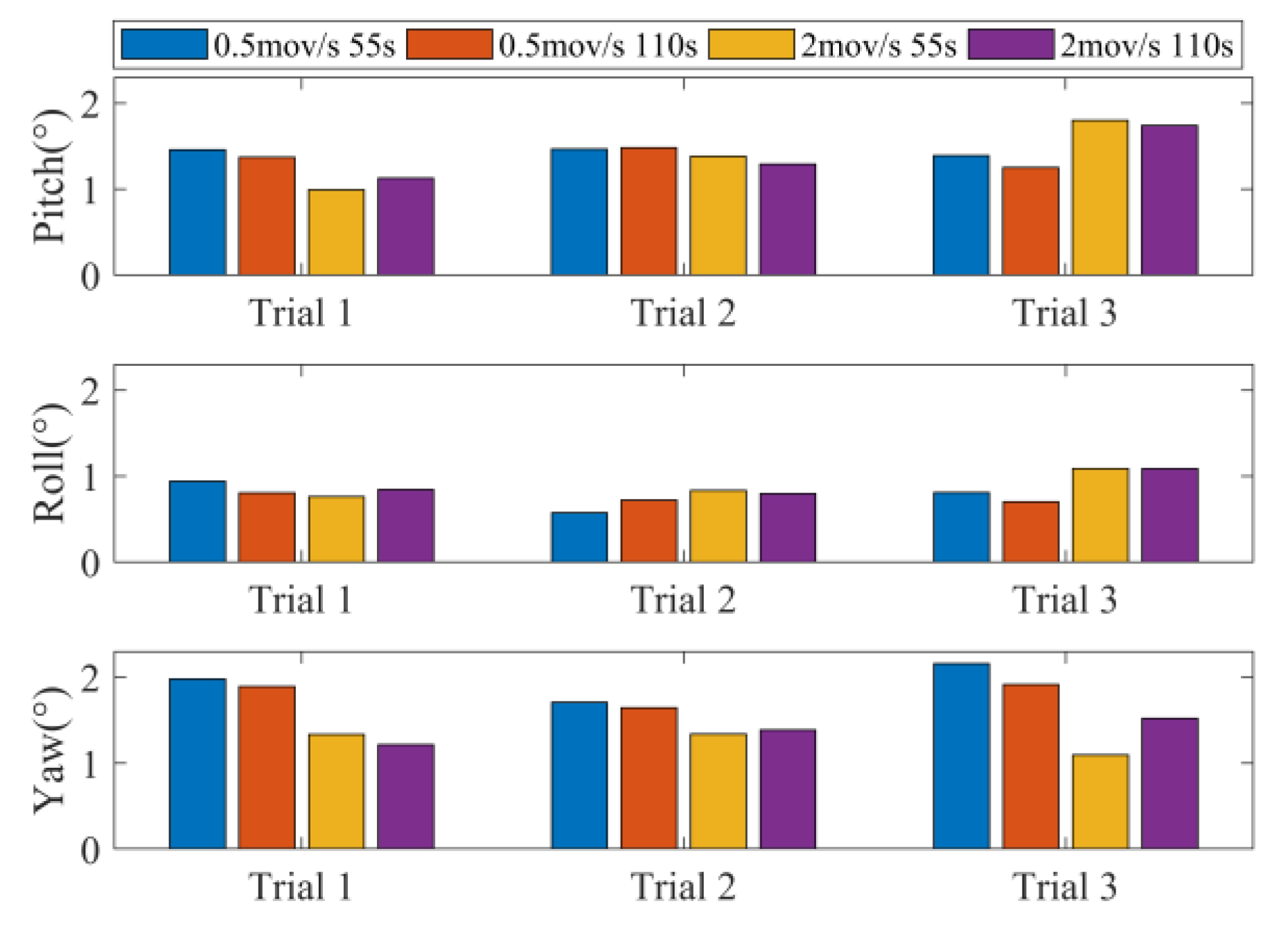
3.1. The Effect of Motion Speed and Test Time on the Proposed FTECF
3.2. Compare the Proposed FTECF and the Other Two Methods
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, H.; Hu, H.; Harris, N.D.; Hammerton, J. Applications of wearable inertial sensors in estimation of upper limb movements. Biomed. Signal Process. Control 2006, 1, 22–32. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based strap-down integration method for applications of inertial sensing to gait analysis. Med. Boil. Eng. Comput. 2005, 43, 94–101. [Google Scholar] [CrossRef]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- Yun, X.; Bachmann, E.R. Design, Implementation, and Experimental Results of a Quaternion-Based Kalman Filter for Human Body Motion Tracking. IEEE Trans. Robot. 2006, 22, 1216–1227. [Google Scholar] [CrossRef] [Green Version]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. Complementary Observer for Body Segments Motion Capturing by Inertial and Magnetic Sensors. IEEE/ASME Trans. Mechatron. 2014, 19, 149–157. [Google Scholar] [Green Version]
- Tian, Y.; Wei, H.; Tan, J. An adaptive-gain complementary filter for real-time human motion tracking with MARG sensors in free-living environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 254–264. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Brigante, C.M.N.; Abbate, N.; Basile, A.; Faulisi, A.C.; Sessa, S. Towards Miniaturization of a MEMS-Based Wearable Motion Capture System. IEEE Trans. Ind. Electron. 2011, 58, 3234–3241. [Google Scholar] [CrossRef]
- Zhang, Z.Q.; Wu, J.K. A Novel Hierarchical Information Fusion Method for Three-Dimensional Upper Limb Motion Estimation. IEEE Trans. Instrum. Meas. 2011, 60, 3709–3719. [Google Scholar] [CrossRef]
- Bachmann, E.R.; Mcghee, R.B.; Yun, X.; Zyda, M.J. Inertial and magnetic posture tracking for inserting humans into networked virtual environments. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Baniff, AB, Canada, 15–17 November 2001; pp. 9–16. [Google Scholar]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, A. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; p. 5975346. [Google Scholar]
- Baker, R. ISB recommendation on definition of joint coordinate systems for the reporting of human joint motion-part I: Ankle, hip and spine. J. Biomech. 2003, 36, 300–302. [Google Scholar] [CrossRef]
- Yun, X.; Bachmann, E.R.; Mcghee, R.B. A Simplified Quaternion-Based Algorithm for Orientation Estimation from Earth Gravity and Magnetic Field Measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. Xsens Motion Technol. BV. Available online: https://www.researchgate.net/publication/239920367_Xsens_MVN_Full_6DOF_human_motion_tracking_using_miniature_inertial_sensors (accessed on 17 October 2018).
- Mortari, D. ESOQ-2 Single-Point Algorithm for Fast Optimal Spacecraft Attitude Determination; American Society of Mechanical Engineers: New York, NY, USA, 1997. [Google Scholar]
- Chen, B. Practical Ergonomics; China Water Conservancy and Hydropower Press: Beijing, China, 2017; ISBN 978-7-5170-5668-3. [Google Scholar]
- Bachmann, E.R. Inertial and Magnetic Angle Tracking of Limb Segments for Inserting Humans into Synthetic Environments. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2000. [Google Scholar]
- Wahba, G. A Least Squares Estimate of Satellite Attitude. Siam Rev. 2006, 7, 409. [Google Scholar] [CrossRef]
- Mortari, D. Second Estimator of the Optimal Quaternion. J. Guid. Control Dyn. 2000, 23, 885–887. [Google Scholar] [CrossRef]
- Zhang, G.L. Fuzzy Control and MATLAB Applications; Xi’an Jiaotong University Press: Xi’an, China, 2002; ISBN 7-5605-1067-1. [Google Scholar]
- Data Sheet MTi 1-Series. Available online: https://www.xsens.com/download/pdf/documentation/mti-1/mti-1-series-datasheet-rev-d.pdf (accessed on 20 August 2018).
- Oqus Cameras Products. Available online: https://www.qualisys.com/cameras/oqus/ (accessed on 20 August 2018).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e1 | u |
|---|---|
| small | small |
| large | large |
| Euler Angles (°) | FTECF | Madgwick’s Method | Yun’s Method |
|---|---|---|---|
| RMSE (pitch) | 1.8024 | 2.2313 | 1.9024 |
| RMSE (roll) | 1.0884 | 1.2695 | 1.4793 |
| RMSE (yaw) | 2.1605 | 2.1393 | 2.5881 |
| Maximum error | 5.376 | 5.801 | 9.463 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xiao, W. A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors. Sensors 2018, 18, 3517. https://doi.org/10.3390/s18103517
Zhang X, Xiao W. A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors. Sensors. 2018; 18(10):3517. https://doi.org/10.3390/s18103517
Chicago/Turabian StyleZhang, Xiaoyue, and Wan Xiao. 2018. "A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors" Sensors 18, no. 10: 3517. https://doi.org/10.3390/s18103517
APA StyleZhang, X., & Xiao, W. (2018). A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors. Sensors, 18(10), 3517. https://doi.org/10.3390/s18103517